You might also like
- CSE 326: Data Structures Lecture #21 Multidimensional Search TreesDocument42 pagesCSE 326: Data Structures Lecture #21 Multidimensional Search TreesThaddeus MooreNo ratings yet
- Binary TreeDocument41 pagesBinary TreeCM-111 jeevinNo ratings yet
- Blind (Uninformed) Search: Simple Problem-Solving-Agent Agent AlgorithmDocument11 pagesBlind (Uninformed) Search: Simple Problem-Solving-Agent Agent AlgorithmAnonymous ChASJ3eFsHNo ratings yet
- Informed Search: Idea: Be Smart About What Paths To TryDocument31 pagesInformed Search: Idea: Be Smart About What Paths To Trytalhaaftab728No ratings yet
- Elementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET AmritsarDocument58 pagesElementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET Amritsarkshitij1993No ratings yet
- Uninformed Search TechniquesDocument22 pagesUninformed Search TechniquesAhmed AbdulwahabNo ratings yet
- Alexandru StochitoiuDocument36 pagesAlexandru StochitoiuBaronescu MihaitaNo ratings yet
- C++ Full Course 2Document80 pagesC++ Full Course 2Tarandeep singhNo ratings yet
- Tree Traversal Techniques HeapsDocument34 pagesTree Traversal Techniques HeapsarefkNo ratings yet
- C S 1 1 3 2 Design: - Data Structures and SoftwareDocument39 pagesC S 1 1 3 2 Design: - Data Structures and Softwarekerhun123No ratings yet
- DSA SS ZG519 EC-3R SEM-1 2015-16 (Sols)Document38 pagesDSA SS ZG519 EC-3R SEM-1 2015-16 (Sols)John WickNo ratings yet
- TreeDocument654 pagesTreesumitNo ratings yet
- ECE608 Homework #8 Solution, Fall 2003Document13 pagesECE608 Homework #8 Solution, Fall 2003Mrinal TakNo ratings yet
- 05 Intelligent Systems-SearchMethodsDocument61 pages05 Intelligent Systems-SearchMethodsRoddy LavoeNo ratings yet
- Lec24. Binary Search Tree (BST)Document46 pagesLec24. Binary Search Tree (BST)Majd AL KawaasNo ratings yet
- 19MID0069 - Adv Algo - ETH DA-1Document21 pages19MID0069 - Adv Algo - ETH DA-1M puneethNo ratings yet
- Backtracking Dfs BfsDocument8 pagesBacktracking Dfs BfskatzumatoNo ratings yet
- 3.0 State Space Representation of ProblemsDocument18 pages3.0 State Space Representation of ProblemsnikwplayNo ratings yet
- Solution of Data Structure ST-2 PDFDocument21 pagesSolution of Data Structure ST-2 PDFharshitNo ratings yet
- Data Structures: 2-3 Trees, B Trees, TRIE TreesDocument41 pagesData Structures: 2-3 Trees, B Trees, TRIE TreesCojocaru IonutNo ratings yet
- DAA - Decrease and ConguerDocument72 pagesDAA - Decrease and ConguerAndika NugrahaNo ratings yet
- Tree TraversalsDocument7 pagesTree TraversalsAditya GaurNo ratings yet
- Branch and BoundDocument30 pagesBranch and BoundPriyabrata MishraNo ratings yet
- Ch7 TreesDocument28 pagesCh7 TreesUsama LuckyNo ratings yet
- DS NumericalsDocument17 pagesDS NumericalsHARESHNo ratings yet
- Unit 3 and Unit 4 DSA QB For ETEDocument35 pagesUnit 3 and Unit 4 DSA QB For ETEamity1546No ratings yet
- Tree TraversalsDocument4 pagesTree TraversalsSiddharth AfriaNo ratings yet
- Lecture 12 - Graphs P2 PDFDocument59 pagesLecture 12 - Graphs P2 PDFminhthang_hanuNo ratings yet
- Search Algorithms: February 11, 2013Document103 pagesSearch Algorithms: February 11, 2013elvagojpNo ratings yet
- Algorithm Short NoteDocument4 pagesAlgorithm Short NoteBinam LikuNo ratings yet
- Chapter 6 - TreeDocument90 pagesChapter 6 - TreeNguyen DanhNo ratings yet
- MC0080 - Analysis and Design of AlgorithmsDocument11 pagesMC0080 - Analysis and Design of AlgorithmsHarvinder SinghNo ratings yet
- TreesDocument129 pagesTreessaisreeNo ratings yet
- 2u 2022 Fort ST Trial Paper With SolutionsDocument71 pages2u 2022 Fort ST Trial Paper With Solutionstetece8105No ratings yet
- Harvey James Paper 1 Timeline and Graph AlgorithmsDocument31 pagesHarvey James Paper 1 Timeline and Graph AlgorithmsHarALevelComputing JNo ratings yet
- Data StructrDocument226 pagesData StructrJaimon JacobNo ratings yet
- Data Structures: 10 Lecture - Binary Search TreeDocument22 pagesData Structures: 10 Lecture - Binary Search TreeHard FuckerNo ratings yet
- Digital Assignment Theory 18bca0045Document16 pagesDigital Assignment Theory 18bca0045Shamil IqbalNo ratings yet
- AI Unit 2 AlgorithmsDocument45 pagesAI Unit 2 AlgorithmsPVV RAMA RAONo ratings yet
- SP Trees PDFDocument22 pagesSP Trees PDFAnonymous AlhzFE9EVNNo ratings yet
- DAA Worksheet-3.1 20BCS7611Document11 pagesDAA Worksheet-3.1 20BCS7611AYUSH TIWARINo ratings yet
- Uninformed Search StrategiesDocument67 pagesUninformed Search Strategieszamirk kaoNo ratings yet
- Archie P. Amparo MCS 501: August 11, 2012Document9 pagesArchie P. Amparo MCS 501: August 11, 2012apamparoNo ratings yet
- LAB Manual Part A: Experiment No.02Document12 pagesLAB Manual Part A: Experiment No.02BiatchNo ratings yet
- Solving Problems by Searching: The Theory and Technology of Building Agents That Can Plan Ahead To Solve ProblemsDocument67 pagesSolving Problems by Searching: The Theory and Technology of Building Agents That Can Plan Ahead To Solve ProblemsHussain RizviNo ratings yet
- 1 Complexity and RecursionDocument6 pages1 Complexity and RecursionShuvadeep DasNo ratings yet
- K'TH Largest Element in BSTDocument5 pagesK'TH Largest Element in BSTdebomitaNo ratings yet
- Introduction To Multi-Agent Programming: Search Algorithms and Path-FindingDocument49 pagesIntroduction To Multi-Agent Programming: Search Algorithms and Path-FindingAvs PavanNo ratings yet
- What Is A Tree: - Organization Charts - File Systems - Programming EnvironmentsDocument59 pagesWhat Is A Tree: - Organization Charts - File Systems - Programming EnvironmentsHarish ramNo ratings yet
- Priority Queues (Heaps)Document56 pagesPriority Queues (Heaps)bhavana1203No ratings yet
- December: 6.034 Final Examination SolutionsDocument26 pagesDecember: 6.034 Final Examination SolutionsMaria SilvaNo ratings yet
- T21-86 AI Exp4Document5 pagesT21-86 AI Exp4Gaurang PatyaneNo ratings yet
- Assignment - IC Binary Trees SolutionsDocument34 pagesAssignment - IC Binary Trees SolutionsDrKrishna Priya ChakireddyNo ratings yet
- hw07 Solution PDFDocument7 pageshw07 Solution PDFsiddharth1kNo ratings yet
- Homework of RP SirDocument9 pagesHomework of RP SirIndra JeetNo ratings yet
- Data Structures and Algorithms: (CS210/ESO207/ESO211)Document35 pagesData Structures and Algorithms: (CS210/ESO207/ESO211)Moazzam HussainNo ratings yet
- Exercises Week7 8Document17 pagesExercises Week7 8Chirag SoodNo ratings yet
- Cse101 Handout5Document19 pagesCse101 Handout5Adi SahaNo ratings yet
- Code 2Document1 pageCode 2Vaibhav MakkarNo ratings yet
- KJDocument1 pageKJVaibhav MakkarNo ratings yet
- PTTDocument1 pagePTTVaibhav MakkarNo ratings yet
- CodingDocument1 pageCodingVaibhav MakkarNo ratings yet
- ManagersDocument1 pageManagersVaibhav MakkarNo ratings yet
- XCVDocument1 pageXCVVaibhav MakkarNo ratings yet
- Beta TstingDocument1 pageBeta TstingVaibhav MakkarNo ratings yet
- MBA (Tech) - 5th Year - Sem IX - 12.09.2015Document6 pagesMBA (Tech) - 5th Year - Sem IX - 12.09.2015Vaibhav MakkarNo ratings yet
- Cronbach's AlphaDocument3 pagesCronbach's AlphaVaibhav MakkarNo ratings yet
- State FulDocument1 pageState FulVaibhav MakkarNo ratings yet
- CodingDocument1 pageCodingVaibhav MakkarNo ratings yet
- UnileverDocument28 pagesUnileverVaibhav MakkarNo ratings yet
- SRB University 2014Document101 pagesSRB University 2014Vaibhav MakkarNo ratings yet
- ManagersDocument1 pageManagersVaibhav MakkarNo ratings yet
- MbaDocument1 pageMbaVaibhav MakkarNo ratings yet
- CountersDocument22 pagesCountersVaibhav MakkarNo ratings yet
- BeautyDocument1 pageBeautyVaibhav MakkarNo ratings yet
- RM Team QuestionsDocument1 pageRM Team QuestionsVaibhav MakkarNo ratings yet
- Unit 1 - Stacks & QueuesDocument74 pagesUnit 1 - Stacks & QueuesVaibhav MakkarNo ratings yet
- SBM Final Placement ReportDocument4 pagesSBM Final Placement ReportVaibhav MakkarNo ratings yet
- Tech Max Book ListDocument3 pagesTech Max Book ListVaibhav MakkarNo ratings yet
- Game TreeDocument14 pagesGame TreeVaibhav MakkarNo ratings yet
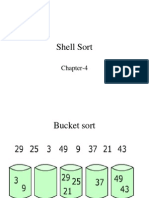
- Shell SortDocument22 pagesShell SortVaibhav MakkarNo ratings yet
- Notice - New Academic Timing of MPSTM - For StudentsDocument1 pageNotice - New Academic Timing of MPSTM - For StudentsVaibhav MakkarNo ratings yet
- Shell SortDocument22 pagesShell SortVaibhav MakkarNo ratings yet
- Unit 6 - Minimum Spanning TreeDocument48 pagesUnit 6 - Minimum Spanning TreeVaibhav MakkarNo ratings yet
- Unit 2 - Analysis of AlgorithmDocument30 pagesUnit 2 - Analysis of AlgorithmVaibhav MakkarNo ratings yet
- Linked List: by Mrs. Preeti S. PatilDocument52 pagesLinked List: by Mrs. Preeti S. PatilVaibhav MakkarNo ratings yet
- Unit 1 - TreesDocument59 pagesUnit 1 - TreesVaibhav MakkarNo ratings yet
- Elementary Graph Algorithms: Slide Sources: CLRS "Intro. To Algorithms" Book Website Adapted and SupplementedDocument20 pagesElementary Graph Algorithms: Slide Sources: CLRS "Intro. To Algorithms" Book Website Adapted and SupplementedharveyNo ratings yet
- 11163-PDF File-46417-2-10-20230915Document32 pages11163-PDF File-46417-2-10-20230915just readerNo ratings yet
- TreesDocument32 pagesTreesSoham MitraNo ratings yet
- Douglas West Solution 1.2Document10 pagesDouglas West Solution 1.2Ganesh SutarNo ratings yet
- f22 hw7 SolDocument12 pagesf22 hw7 SolPeter RosenbergNo ratings yet
- Unit Iv Non Linear Data Structures - GraphsDocument29 pagesUnit Iv Non Linear Data Structures - GraphsRekhasreeGoneNo ratings yet
- Graphalgorithms-Bfs and DfsDocument14 pagesGraphalgorithms-Bfs and Dfsjayit sahaNo ratings yet
- Chapter 2Document17 pagesChapter 2priyaadharshiniNo ratings yet
- Graphs in Sage MathDocument874 pagesGraphs in Sage Mathelham100% (1)
- Bridges in A Graph - GeeksforGeeksDocument11 pagesBridges in A Graph - GeeksforGeeksAtul GargNo ratings yet
- Venkat 2012307045 GT12 PDFDocument2 pagesVenkat 2012307045 GT12 PDFVenkatGonuguntlaNo ratings yet
- QuestionsDocument31 pagesQuestionsHithaishi BathuluriNo ratings yet
- DSA-Unit 5Document39 pagesDSA-Unit 5devisht nayyarNo ratings yet
- SEM5 - ADA - RMSE - Questions Solution1Document58 pagesSEM5 - ADA - RMSE - Questions Solution1DevanshuNo ratings yet
- Graph 1Document6 pagesGraph 1dheena thayalanNo ratings yet
- Algorithms TopicsDocument11 pagesAlgorithms TopicsAnonymous 1Xtj2DjMNo ratings yet
- CS235102 Data Structures: Chapter 6 GraphsDocument55 pagesCS235102 Data Structures: Chapter 6 GraphsasdfsddfNo ratings yet
- Design and Analysis of AlgorithmsDocument39 pagesDesign and Analysis of AlgorithmsKaarletNo ratings yet
- Topological Indices For GraphDocument53 pagesTopological Indices For GraphzubairNo ratings yet
- Design and Analysis of Algorithm - QBDocument14 pagesDesign and Analysis of Algorithm - QBAkshay PawarNo ratings yet
- Daa Queston BankDocument6 pagesDaa Queston Bankharish babu aluruNo ratings yet
- ADS SyllabusDocument1 pageADS SyllabusSubhash KulhariNo ratings yet
- Geethanjali College of Engineering and TechnologyDocument62 pagesGeethanjali College of Engineering and TechnologyAnil KumarNo ratings yet
- DAA-University 2mark Questions and AnswersDocument23 pagesDAA-University 2mark Questions and AnswersSharan DeNo ratings yet
- Soon Question ListDocument8 pagesSoon Question ListSuvid SahayNo ratings yet
- Basic Traversal and Search TechniquesDocument10 pagesBasic Traversal and Search TechniquesSagar ManeNo ratings yet
- Restrained Lict Domination in GraphsDocument7 pagesRestrained Lict Domination in GraphsInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Homework 1: You Are Allowed To Have at Most 4 CollaboratorsDocument3 pagesHomework 1: You Are Allowed To Have at Most 4 CollaboratorsmahNo ratings yet
- Introduction to Graphs (Part I-IIIDocument69 pagesIntroduction to Graphs (Part I-IIIKaushil KundaliaNo ratings yet