You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Glossary of Terms-DLIDocument5 pagesGlossary of Terms-DLImanteghNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- AxialDocument1 pageAxialmanteghNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Gear Backlash: Theoretical Stiffness Curve and Backlash of A GearboxDocument4 pagesGear Backlash: Theoretical Stiffness Curve and Backlash of A Gearboxraobabar21No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- SDT270 EN Folder 8p PDFDocument5 pagesSDT270 EN Folder 8p PDFmanteghNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Transient Characteristics of A Hydraulically Interconnected Suspension System PDFDocument12 pagesTransient Characteristics of A Hydraulically Interconnected Suspension System PDFmanteghNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Axial Thrust Position Sensor PDFDocument3 pagesAxial Thrust Position Sensor PDFmanteghNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shock AbsorbersDocument12 pagesShock AbsorbersmanteghNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Passive PDFDocument4 pagesPassive PDFmanteghNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Gear Backlash: Theoretical Stiffness Curve and Backlash of A GearboxDocument4 pagesGear Backlash: Theoretical Stiffness Curve and Backlash of A Gearboxraobabar21No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Paper 29Document7 pagesPaper 29civapradhaNo ratings yet
- rv200 Se PDFDocument4 pagesrv200 Se PDFmanteghNo ratings yet
- C. Condition Monitoring PDFDocument9 pagesC. Condition Monitoring PDFmanteghNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- FMEA Worksheet MiningDocument1 pageFMEA Worksheet Miningresure100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- FMEA RevisedDocument2 pagesFMEA RevisedAnshul KothariNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Useful Key Performance Indicators For Maintenance PDFDocument8 pagesUseful Key Performance Indicators For Maintenance PDFfumerojr5164No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Maintenance Glossary & Acronyms (Guidelines For Process Equipment Reliability Data With Data Tables Center)Document7 pagesMaintenance Glossary & Acronyms (Guidelines For Process Equipment Reliability Data With Data Tables Center)manteghNo ratings yet
- Oee Pocket GuideDocument2 pagesOee Pocket Guidearachman297988100% (2)
- Lean MaintenanceDocument2 pagesLean MaintenancemanteghNo ratings yet
- Time Allowed: 20 Minutes Marks: 12: Section - ADocument3 pagesTime Allowed: 20 Minutes Marks: 12: Section - AAliNo ratings yet
- Mercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlDocument217 pagesMercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlBob Andrepont100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Shoot For Your Grade Lab Write UpDocument5 pagesShoot For Your Grade Lab Write Upapi-254812059No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- TCL Air Conditioner Service ManualDocument138 pagesTCL Air Conditioner Service ManualFabian EtcheniqueNo ratings yet
- Electrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room TemperatureDocument6 pagesElectrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room Temperaturereza mirzakhaniNo ratings yet
- LM 08Document38 pagesLM 08Tôi Là Đăng TèoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Quantum NumbersDocument10 pagesQuantum Numbersaplattinum1633No ratings yet
- DPP-1 QuantizationDocument1 pageDPP-1 QuantizationVikasNo ratings yet
- Analytical PS A01 A10 Solutions 2Document14 pagesAnalytical PS A01 A10 Solutions 2MarieNo ratings yet
- Adrian Stan MFQMCourseHsL2006Document60 pagesAdrian Stan MFQMCourseHsL2006禿公No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Introducing JiFi ST Petersburg 2014Document4 pagesIntroducing JiFi ST Petersburg 2014danjohhnNo ratings yet
- 4-1 r14Document12 pages4-1 r14hafizgNo ratings yet
- Text - Anuario Cader 2018 INGLÉS PDFDocument57 pagesText - Anuario Cader 2018 INGLÉS PDFmicaelaNo ratings yet
- Kinematics of Machinery: Motion and AnalysisDocument29 pagesKinematics of Machinery: Motion and AnalysisShashank SinghNo ratings yet
- Practice Questions 2014Document5 pagesPractice Questions 2014Ruqiyya IsrafilovaNo ratings yet
- Waste Incineration Insert v2Document2 pagesWaste Incineration Insert v2Namik HadziibrahimovicNo ratings yet
- MFIX On of Discrete Element MethodDocument30 pagesMFIX On of Discrete Element MethodkamranianNo ratings yet
- HW1Document8 pagesHW1Anonymous fXSlye100% (1)
- Under The Aegis Of: WWW - Ucd.ie/cigrDocument430 pagesUnder The Aegis Of: WWW - Ucd.ie/cigrErin Walker100% (1)
- Java Meets Numerical AnalysisDocument2 pagesJava Meets Numerical AnalysisbernasekNo ratings yet
- Analysis of Truss Using Abaqus SoftwareDocument7 pagesAnalysis of Truss Using Abaqus SoftwareKarthick NNo ratings yet
- 2015-04-21 - 3 - LPE Firemans SyllabusDocument9 pages2015-04-21 - 3 - LPE Firemans SyllabusSumanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Fundamentals of the Pickett Plot: Recognizing Reservoir PatternsDocument9 pagesFundamentals of the Pickett Plot: Recognizing Reservoir PatternsAngelMeso100% (1)
- CAD/CAM Geometric Modelling RepresentationsDocument34 pagesCAD/CAM Geometric Modelling Representationsshantikiran shantikiranNo ratings yet
- Z I ARO: Applications of Axial and Radial Compressor Dynamic System ModelingDocument262 pagesZ I ARO: Applications of Axial and Radial Compressor Dynamic System ModelingRamzi BrkNo ratings yet
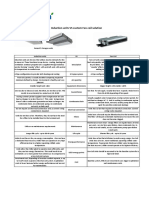
- HotelSolution: Induction Units VS Fan-Coil SolutionDocument1 pageHotelSolution: Induction Units VS Fan-Coil SolutionMoriyasu NguyenNo ratings yet
- Gujarat Technological University: Page 1 of 3Document3 pagesGujarat Technological University: Page 1 of 3DaxNo ratings yet
- Calculation Worksheet PrintDocument7 pagesCalculation Worksheet PrintLovieAlfonsoNo ratings yet
- Methods of Re-Apportioning Service Cost Centre CostsDocument7 pagesMethods of Re-Apportioning Service Cost Centre CostsUserNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)