You might also like
- Stan Shiels on centrifugal pumps: Collected articles from 'World Pumps' magazineFrom EverandStan Shiels on centrifugal pumps: Collected articles from 'World Pumps' magazineRating: 5 out of 5 stars5/5 (1)
- Hydrocom Specification Petronor NP HISA V1 - 0Document33 pagesHydrocom Specification Petronor NP HISA V1 - 0Nattapong Pongboot100% (1)
- Hydrocom General Description 4.01Document18 pagesHydrocom General Description 4.01Nattapong PongbootNo ratings yet
- CMCDocument9 pagesCMCChuma KhanNo ratings yet
- Flow Measurement: By Square-Edged Orifice Plate Using Corner TappingsFrom EverandFlow Measurement: By Square-Edged Orifice Plate Using Corner TappingsRating: 5 out of 5 stars5/5 (1)
- HSS English User Manual 06ADocument29 pagesHSS English User Manual 06ALeon SanchezNo ratings yet
- 07 - Hyd2.0 Installation PDFDocument85 pages07 - Hyd2.0 Installation PDFSudhir SainiNo ratings yet
- HydroCOM Energy SavingsDocument21 pagesHydroCOM Energy Savingsabhik1790% (1)
- Centrifugal CompressorDocument220 pagesCentrifugal CompressorShahnaz Estahbanati0% (1)
- Samson PRV Mounting and Operating InstructionDocument20 pagesSamson PRV Mounting and Operating InstructionRick CalaguiNo ratings yet
- 1 1Document9 pages1 1Ankush SehgalNo ratings yet
- Screw Compressors 2019Document12 pagesScrew Compressors 2019Dzana Kadric0% (1)
- Running Performance: Service/Stage Data Performance OutputDocument2 pagesRunning Performance: Service/Stage Data Performance OutputJose RattiaNo ratings yet
- Loadsharing compressor networksDocument15 pagesLoadsharing compressor networksDev0009No ratings yet
- High Pressure CompressorsDocument16 pagesHigh Pressure CompressorsnghiaNo ratings yet
- D1-170 Ecosmart en PDFDocument8 pagesD1-170 Ecosmart en PDFrakacyuNo ratings yet
- Recip Overview Brochure HSR OnlyDocument11 pagesRecip Overview Brochure HSR OnlyMuhammad ImranNo ratings yet
- Diaphragm Pump Seminar ReportDocument58 pagesDiaphragm Pump Seminar ReportMahaManthraNo ratings yet
- (Book) ch8 - 15 Compressor Control and Optimization PDFDocument31 pages(Book) ch8 - 15 Compressor Control and Optimization PDFAtef Lasheen50% (2)
- Anti SurgeDocument12 pagesAnti SurgebatoqkaNo ratings yet
- Adjust Axial Bently Nevada ProbesDocument3 pagesAdjust Axial Bently Nevada Probesmic-grNo ratings yet
- Beginner's Guide To Centrifugal Compressor System Design & SimulationDocument17 pagesBeginner's Guide To Centrifugal Compressor System Design & Simulationkavinmech1No ratings yet
- F 0077 e 55Document6 pagesF 0077 e 55Bùi Cảnh TrungNo ratings yet
- Three-Stage Compressor Power CalculationDocument6 pagesThree-Stage Compressor Power CalculationRifka Aisyah0% (1)
- Driving Centrifugal Compressor TechnologyDocument52 pagesDriving Centrifugal Compressor TechnologySHRIKANT GADENo ratings yet
- Sizing Technical Brief FinalDocument3 pagesSizing Technical Brief FinalBelalNorNo ratings yet
- Camcs L PlantairDocument20 pagesCamcs L PlantairSergio MoncadaNo ratings yet
- Pump DecokingDocument8 pagesPump Decokingrohl55No ratings yet
- ARIEL Maint intervalSEK PDFDocument7 pagesARIEL Maint intervalSEK PDFMargaret Daugherty100% (1)
- Ufn3 Treinamento e ManutençãoDocument62 pagesUfn3 Treinamento e ManutençãoRodneiNo ratings yet
- Masoneilan SVI II AP Installation and Maintenance Manual (Rev G) PDFDocument180 pagesMasoneilan SVI II AP Installation and Maintenance Manual (Rev G) PDFFelixAvila67% (3)
- Field Performance Testing For Centrifugal CompressorsDocument7 pagesField Performance Testing For Centrifugal CompressorsRicardo BecNo ratings yet
- Reciprocating Compressor ImprovementsDocument13 pagesReciprocating Compressor ImprovementsSANJANA SINGHNo ratings yet
- API 618 Compressors1 PDFDocument0 pagesAPI 618 Compressors1 PDFAnonymous ffje1rpaNo ratings yet
- SRL CompressorsDocument20 pagesSRL Compressorssthe03No ratings yet
- Centrifugal Compresssor Pre-Commissioning ChecklistDocument3 pagesCentrifugal Compresssor Pre-Commissioning ChecklistNikhil JadhavNo ratings yet
- Bombas Reciprocantes PDFDocument43 pagesBombas Reciprocantes PDFSamuel Arias CamachoNo ratings yet
- Load Sharing CompressorDocument2 pagesLoad Sharing CompressorleakNo ratings yet
- SIS - Safety Instrumented Systems - A Practical ViewDocument4 pagesSIS - Safety Instrumented Systems - A Practical ViewMugesh KannaNo ratings yet
- Field Surge Test ProcedureDocument10 pagesField Surge Test ProcedureShyam Adhikary0% (1)
- Centrifugal Compressor HorsepowerDocument9 pagesCentrifugal Compressor HorsepowerCurtis DookieNo ratings yet
- Flowmeter Selection ChartDocument1 pageFlowmeter Selection Chartmilton1987No ratings yet
- FM200 Filling System/ Equipment: Solution A: Filling Machine+ Vacuum Pump+ Weighing SystemDocument2 pagesFM200 Filling System/ Equipment: Solution A: Filling Machine+ Vacuum Pump+ Weighing Systemal boshia100% (1)
- Control Valves ArrangementDocument11 pagesControl Valves ArrangementPrasanna kumar subudhi100% (1)
- Vertical PumpsDocument16 pagesVertical PumpsAdel ShatlaNo ratings yet
- Ingersoll Rand Oil Free CompressedAirTechnologyIAS 0701015 enDocument12 pagesIngersoll Rand Oil Free CompressedAirTechnologyIAS 0701015 envkees1987No ratings yet
- TYPE 8B1/8B1T: Elastomer O-Ring SealsDocument6 pagesTYPE 8B1/8B1T: Elastomer O-Ring SealshukNo ratings yet
- Centrifugal Compressor Surge and Speed ControlDocument14 pagesCentrifugal Compressor Surge and Speed ControlWaqas AhmedNo ratings yet
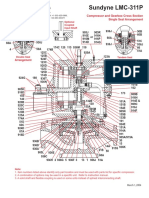
- Compressor Api617 Lmc311p Sundyne Cross-SectionDocument1 pageCompressor Api617 Lmc311p Sundyne Cross-SectionMiguel SoteloNo ratings yet
- OHH OHHL E00697 (Pump Zulzer)Document6 pagesOHH OHHL E00697 (Pump Zulzer)Jose Sosa CojNo ratings yet
- 04 Actuator EnglDocument14 pages04 Actuator Englsumantabal_uceNo ratings yet
- AGA 3 Gas Flow Equation For Orifice Plates - Learning Instrumentation and Control EngineeringDocument10 pagesAGA 3 Gas Flow Equation For Orifice Plates - Learning Instrumentation and Control EngineeringJanuar ReasNo ratings yet
- DHRC Catalog - F164LR.Document28 pagesDHRC Catalog - F164LR.mdalt9180No ratings yet
- AUDIT CENTRIFUGAL COMPRESSOR OIL SEALSDocument33 pagesAUDIT CENTRIFUGAL COMPRESSOR OIL SEALSMuhammad afzal100% (1)
- DRIVE SYSTEM Hydraulic and PneumaticDocument50 pagesDRIVE SYSTEM Hydraulic and PneumaticNor AzlanNo ratings yet
- Hydro ComDocument18 pagesHydro ComOmprakash_janaNo ratings yet
- Hydrocom: High Energy Savings and Excellent ControllabilityDocument8 pagesHydrocom: High Energy Savings and Excellent Controllabilityrahilshah100No ratings yet
- Hydrocom enDocument8 pagesHydrocom enJai-Hong ChungNo ratings yet
- Z-008 Criticality Analysis For Maintenance PurposesDocument34 pagesZ-008 Criticality Analysis For Maintenance PurposesGustavo Farelo SuarezNo ratings yet
- API Plan 53-Accumulator Bladder ChargingDocument11 pagesAPI Plan 53-Accumulator Bladder Chargingsumantabal_uceNo ratings yet
- 04 Actuator EnglDocument14 pages04 Actuator Englsumantabal_uceNo ratings yet
- 01 Genera Lover View of Step Less Capacity Control of Reciprocating CompressorDocument15 pages01 Genera Lover View of Step Less Capacity Control of Reciprocating Compressorsumantabal_uceNo ratings yet
- Screw Pump ManualDocument24 pagesScrew Pump Manualsumantabal_uceNo ratings yet
- Fans & Blowers-Calculation of PowerDocument20 pagesFans & Blowers-Calculation of PowerPramod B.Wankhade92% (24)
- Screw Pump ManualDocument24 pagesScrew Pump Manualsumantabal_uceNo ratings yet
- 03 Hydraulic Unit of Step Less Capacity Control of Reciprocating Compressors.Document5 pages03 Hydraulic Unit of Step Less Capacity Control of Reciprocating Compressors.sumantabal_uceNo ratings yet
- Fans & Blowers-Calculation of PowerDocument20 pagesFans & Blowers-Calculation of PowerPramod B.Wankhade92% (24)
- Balancing of RotorsDocument20 pagesBalancing of RotorsChetan Mistry100% (1)
- Cat 602-1 032510Document58 pagesCat 602-1 032510sumantabal_uceNo ratings yet
- Fmea PumpDocument8 pagesFmea Pumpsumantabal_uceNo ratings yet
- A guide to hydrodynamic bearingsDocument28 pagesA guide to hydrodynamic bearingssumantabal_uceNo ratings yet
- Vol 1 of 3Document12 pagesVol 1 of 3sumantabal_uceNo ratings yet
- Coppus Product GuideDocument6 pagesCoppus Product GuideSayed KassarNo ratings yet
- Wiring Diagram V7Document1 pageWiring Diagram V7NadeeshNo ratings yet
- McCormick X60 Series (2011-2014) - RP67 - X60.50 Tractor Service Repair Manual PDFDocument25 pagesMcCormick X60 Series (2011-2014) - RP67 - X60.50 Tractor Service Repair Manual PDFfjkkekmdmNo ratings yet
- InTech-Fluid Structure InteractionDocument23 pagesInTech-Fluid Structure InteractionDeepak MahapatraNo ratings yet
- Nordson 2018 Replacement Parts Catalog PDFDocument318 pagesNordson 2018 Replacement Parts Catalog PDFsaadalam218_773301970% (1)
- Hydraulic Pressure TestDocument4 pagesHydraulic Pressure TestBola AdelNo ratings yet
- Keperluan Document Sebagai Dasar Penerbitan SLODocument4 pagesKeperluan Document Sebagai Dasar Penerbitan SLOFaturrakhman KhairanNo ratings yet
- Tractor Operator AgricultureDocument9 pagesTractor Operator AgricultureConstantin CarpenNo ratings yet
- DX SPLIT Acum L Cadx l50hzDocument21 pagesDX SPLIT Acum L Cadx l50hzFARIDNo ratings yet
- Kumera-848027c - Installation and Maintenance - en - 2015-08 PDFDocument40 pagesKumera-848027c - Installation and Maintenance - en - 2015-08 PDFgilbertogatoNo ratings yet
- Best Practice Manual-Fluid PipingDocument43 pagesBest Practice Manual-Fluid Pipingapi-3869476100% (1)
- Lecture # 8: Dr. Muzaffar AliDocument37 pagesLecture # 8: Dr. Muzaffar Alikamran bhatNo ratings yet
- Smokevent Calculation..Document2 pagesSmokevent Calculation..Karthy GanesanNo ratings yet
- Bagatelle Showroom Structural AnalysisDocument15 pagesBagatelle Showroom Structural AnalysisDhiraj BeechooNo ratings yet
- Parts of A CarDocument5 pagesParts of A CarMaria MolinaNo ratings yet
- Atlas Copco QES RangeDocument8 pagesAtlas Copco QES RangeDave WallaceNo ratings yet
- Mechanical Sensors 25augustDocument74 pagesMechanical Sensors 25augustSasikumar SukumaranNo ratings yet
- Fan Application GuidelineDocument6 pagesFan Application GuidelineEdward SabedraNo ratings yet
- Newco Product Line BrochureDocument8 pagesNewco Product Line BrochureshahganNo ratings yet
- SDFDSF PDFDocument2 pagesSDFDSF PDFJohnny CcanchiNo ratings yet
- S Emi Rotary Hand Wing Pumps: A Plication PDocument2 pagesS Emi Rotary Hand Wing Pumps: A Plication PMarketing CTNNo ratings yet
- Heat Flow Calculations Made Using The V C: Ventilation Test InstrumentsDocument6 pagesHeat Flow Calculations Made Using The V C: Ventilation Test Instrumentsretrospect1000No ratings yet
- Trusses ExamplesDocument13 pagesTrusses ExamplesShaikh Yaseen MehmoodNo ratings yet
- Soil Mechanics Problems QBDocument4 pagesSoil Mechanics Problems QBKalasekar M SwamyNo ratings yet
- GEO3701 Unit 3Document94 pagesGEO3701 Unit 3Asithandile Punqunqu MpayipheliNo ratings yet
- Curvilinear Motion and ProjectilesDocument15 pagesCurvilinear Motion and ProjectilesAltammar1367% (3)
- Adsorption Gas Treatment Plant - Design Information: Spec. NumberDocument5 pagesAdsorption Gas Treatment Plant - Design Information: Spec. NumberabhmarsNo ratings yet
- ME8091 Automobile Engineering1Document2 pagesME8091 Automobile Engineering1AyyanrajNo ratings yet
- FT4 C PDFDocument5 pagesFT4 C PDFGeorge John AmegashieNo ratings yet
- Trilectron DAC900 TMEverestDocument394 pagesTrilectron DAC900 TMEverestVictory GSENo ratings yet
- Kit de Joint de Verin CaterpillarDocument2 pagesKit de Joint de Verin CaterpillarzephyrinNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Solar Electricity Basics: Powering Your Home or Office with Solar EnergyFrom EverandSolar Electricity Basics: Powering Your Home or Office with Solar EnergyRating: 5 out of 5 stars5/5 (3)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionFrom EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionRating: 4.5 out of 5 stars4.5/5 (16)