You might also like
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- Signal and SystemDocument15 pagesSignal and Systemswap_k007100% (1)
- Gemology PDFDocument65 pagesGemology PDFNamwangala Rashid Natindu50% (2)
- Modern Approaches to Stochastic Volatility CalibrationDocument43 pagesModern Approaches to Stochastic Volatility Calibrationhsch345No ratings yet
- Stiffness Modifiers As Per IS 1893 (Part 1) - 2016Document6 pagesStiffness Modifiers As Per IS 1893 (Part 1) - 2016Kamal Rao100% (1)
- Fundamentals of SurveyingDocument14 pagesFundamentals of SurveyingZar Frianeza100% (1)
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- Piping Arrangement - Conventional Oil Tanker BasicsDocument11 pagesPiping Arrangement - Conventional Oil Tanker BasicsEmon Anowar100% (1)
- Resume for Software Professional with 9+ Years of IT ExperienceDocument9 pagesResume for Software Professional with 9+ Years of IT ExperiencepraveenNo ratings yet
- Boysen Price ListDocument26 pagesBoysen Price ListBrian SantosNo ratings yet
- Convolution and Correlation 10Document1 pageConvolution and Correlation 10Harshali WavreNo ratings yet
- The Convolution Integral: D T H X T H T X T yDocument39 pagesThe Convolution Integral: D T H X T H T X T yshahriaraustNo ratings yet
- Laplace TransformationDocument10 pagesLaplace TransformationAhasan UllaNo ratings yet
- A Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisDocument8 pagesA Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisYoung EngineerNo ratings yet
- EEE 303 HW # 1 SolutionsDocument22 pagesEEE 303 HW # 1 SolutionsDhirendra Kumar SinghNo ratings yet
- Homework Set 3 SolutionsDocument15 pagesHomework Set 3 SolutionsEunchan KimNo ratings yet
- 14.1 Differential Equations: DefinitionsDocument52 pages14.1 Differential Equations: DefinitionsDaniel Lee Eisenberg JacobsNo ratings yet
- 4.5 Black-Scholes-Merton Equation PartDocument40 pages4.5 Black-Scholes-Merton Equation Partkajal_shah_3No ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument24 pages16.323 Principles of Optimal Control: Mit OpencoursewareTomas SalmoiraghiNo ratings yet
- KOM 3781 - Discrete-Time Control Systems Sampled SignalsDocument38 pagesKOM 3781 - Discrete-Time Control Systems Sampled SignalsFatih CanbolatNo ratings yet
- Dr Shikongo's I3611IM Lecture NotesDocument116 pagesDr Shikongo's I3611IM Lecture NotesJonas XoxaeNo ratings yet
- Solution of Ordinary Differential Equations: 1 General TheoryDocument3 pagesSolution of Ordinary Differential Equations: 1 General TheoryvlukovychNo ratings yet
- Chapter 3: Linear Time-Invariant Systems 3.1 MotivationDocument23 pagesChapter 3: Linear Time-Invariant Systems 3.1 Motivationsanjayb1976gmailcomNo ratings yet
- LCCDEDocument26 pagesLCCDEChadwick BarclayNo ratings yet
- ConvolutionDocument32 pagesConvolutionGirijesh Kumar100% (2)
- 20 5 Convolution THMDocument8 pages20 5 Convolution THMsanjayNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- Time-domain Representations of Continuous-time SystemsDocument8 pagesTime-domain Representations of Continuous-time SystemsSamNo ratings yet
- FIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsDocument33 pagesFIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsdamnedchildNo ratings yet
- Linear Operators Explained in 60 TopicsDocument28 pagesLinear Operators Explained in 60 TopicsAsmara ChNo ratings yet
- Lecture 1Document47 pagesLecture 1oswardNo ratings yet
- Signal & Systems-DONEDocument40 pagesSignal & Systems-DONEnavNo ratings yet
- MAE546 Lecture 3Document15 pagesMAE546 Lecture 3Shivan BiradarNo ratings yet
- Ece2610 Chap9Document24 pagesEce2610 Chap9Bayar JargalNo ratings yet
- Singularity Functions ExplainedDocument3 pagesSingularity Functions ExplainedMelody ShieldsNo ratings yet
- Acquisition and Analysis of Neural Data: Analytical Problem Set 1Document3 pagesAcquisition and Analysis of Neural Data: Analytical Problem Set 1PritamSenNo ratings yet
- Communication 1Document87 pagesCommunication 1Trường NguyễnNo ratings yet
- Optimal Gradual Liquidation of Equity From A Risky Asset: Nikolai DokuchaevDocument8 pagesOptimal Gradual Liquidation of Equity From A Risky Asset: Nikolai DokuchaevndokuchNo ratings yet
- Black-Scholes PDE ReviewDocument8 pagesBlack-Scholes PDE Reviewvjean_jacquesNo ratings yet
- Lect 3 PDFDocument34 pagesLect 3 PDFحاتم غيدان خلفNo ratings yet
- Solutions To Linear First Order ODE's 1. First Order Linear EquationsDocument6 pagesSolutions To Linear First Order ODE's 1. First Order Linear EquationsJuan Gutier CcNo ratings yet
- Solving Convolution Problems: PART I: Using The Convolution IntegralDocument4 pagesSolving Convolution Problems: PART I: Using The Convolution IntegralMayank NautiyalNo ratings yet
- Signals and Systems Unit 2: Mit-WpuDocument31 pagesSignals and Systems Unit 2: Mit-WpuZaheen KhanNo ratings yet
- 20 5 Convolution THMDocument8 pages20 5 Convolution THMsanjayNo ratings yet
- Signals and Systems 01Document10 pagesSignals and Systems 01nvbondNo ratings yet
- HW3 SolnDocument12 pagesHW3 SolnDanny MejíaNo ratings yet
- LTI Systems ConvolutionDocument30 pagesLTI Systems ConvolutionJoseph IbrahimNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- Optimal Control: The Maximum Principle: F (K,AL) −CL − δKDocument16 pagesOptimal Control: The Maximum Principle: F (K,AL) −CL − δKOnur KarabulutNo ratings yet
- Discrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerDocument25 pagesDiscrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerOmnia TaalabNo ratings yet
- CS Lecture 4Document29 pagesCS Lecture 4sadaf asmaNo ratings yet
- DPS ResultsDocument1 pageDPS ResultsIoana DumitrescuNo ratings yet
- Bilkent EEE Lab Assignment on Signal InterpolationDocument4 pagesBilkent EEE Lab Assignment on Signal InterpolationAtakan YiğitNo ratings yet
- Write Equations TutorialDocument2 pagesWrite Equations TutorialsooryaNo ratings yet
- Oil and Gas Prices: Hotelling's Rule and the Economics of Depletable ResourcesDocument15 pagesOil and Gas Prices: Hotelling's Rule and the Economics of Depletable Resources3revosNo ratings yet
- CT ConvolutionDocument20 pagesCT ConvolutionahmdNo ratings yet
- Numerical Integration Techniques: A Brief IntroductionDocument51 pagesNumerical Integration Techniques: A Brief IntroductionJ.l. JeffersonNo ratings yet
- MIT presentation(physics-mecahanics)Document22 pagesMIT presentation(physics-mecahanics)mevlana3992No ratings yet
- Optimal ControlDocument41 pagesOptimal ControlAdem BRITAHNo ratings yet
- Convolution SCDocument26 pagesConvolution SCHaneul KImNo ratings yet
- EE4440 HW#1 Solution: January 20, 2011Document5 pagesEE4440 HW#1 Solution: January 20, 2011TibouNo ratings yet
- Module-2: Tensor Calculus: Lecture-16: The Time Derivative and Some Integral TheoremsDocument7 pagesModule-2: Tensor Calculus: Lecture-16: The Time Derivative and Some Integral TheoremsHamza SiddiquiNo ratings yet
- H2-Optimal Control - Lec8Document83 pagesH2-Optimal Control - Lec8stara123warNo ratings yet
- ECE3222 ME1 Fa2014 SolutionsDocument11 pagesECE3222 ME1 Fa2014 SolutionsAnas AlderwishNo ratings yet
- Lecture 8 DUDLEY'S INTEGRAL INEQUALITYDocument7 pagesLecture 8 DUDLEY'S INTEGRAL INEQUALITYBoul chandra GaraiNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- STD Procedure For Evaluation of Bids For Procurement of WorksDocument33 pagesSTD Procedure For Evaluation of Bids For Procurement of WorksArshad MahmoodNo ratings yet
- STD Procedure-Evaluation of Proposals For Procurement of Engg Services PDFDocument90 pagesSTD Procedure-Evaluation of Proposals For Procurement of Engg Services PDFMoez Ul HassanNo ratings yet
- +5V Powered, Dual RS-232 Transmitter/Receiver: FeaturesDocument8 pages+5V Powered, Dual RS-232 Transmitter/Receiver: FeaturesMoez Ul HassanNo ratings yet
- Optimal Mising of Eddy Current SignalsDocument8 pagesOptimal Mising of Eddy Current SignalsMoez Ul HassanNo ratings yet
- Introduction To MatlabDocument30 pagesIntroduction To MatlabMoez Ul HassanNo ratings yet
- Reasoning and Modeling Systems in Diagnosis and PrognosisDocument10 pagesReasoning and Modeling Systems in Diagnosis and PrognosisMoez Ul HassanNo ratings yet
- Ed 520Document3 pagesEd 520Moez Ul HassanNo ratings yet
- Purdue University Calumet ECET Digital Logic CourseDocument4 pagesPurdue University Calumet ECET Digital Logic CourseMoez Ul Hassan0% (1)
- Syegon Leaflet 2012Document2 pagesSyegon Leaflet 2012kanteron6443No ratings yet
- Router On A StickDocument5 pagesRouter On A SticksreenathonwebNo ratings yet
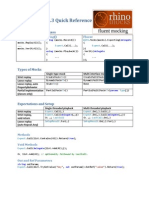
- Rhino MocksDocument3 pagesRhino MocksVenkateswararao KonjetiNo ratings yet
- Ohio EPA Sends Violation To Norwood Safety Service Director Joe GeersDocument5 pagesOhio EPA Sends Violation To Norwood Safety Service Director Joe GeersCincinnatiEnquirerNo ratings yet
- BFSA 2015 03 Hand Chipping On Structures 506792 7Document1 pageBFSA 2015 03 Hand Chipping On Structures 506792 7Solomon AhimbisibweNo ratings yet
- Problem SET 9.1Document9 pagesProblem SET 9.1Zhafaat RahimiNo ratings yet
- Checklist BizTalk Application MigrationDocument11 pagesChecklist BizTalk Application MigrationMadhusudhan AkulaNo ratings yet
- Exercise #2: Name: Dimal, NeilDocument3 pagesExercise #2: Name: Dimal, NeilNeilLaurrenceDimal0% (1)
- ICP WorkshopDocument2 pagesICP WorkshopOmar AyoubNo ratings yet
- Generator BrochureDocument32 pagesGenerator BrochuresudiNo ratings yet
- Continuous Beam AnalysisDocument42 pagesContinuous Beam AnalysisMuhd MuqhreyNo ratings yet
- PDMS Support Design UsingDocument83 pagesPDMS Support Design UsingTien LeNo ratings yet
- Uk - NCF TS 20Document36 pagesUk - NCF TS 20Mohamed Hanafy TahaNo ratings yet
- 3M Safety & Security Window Film Brochure Hi ResDocument6 pages3M Safety & Security Window Film Brochure Hi ResAhmed M AminNo ratings yet
- Good Manual Xilinx-Fpga Fpga TimingDocument168 pagesGood Manual Xilinx-Fpga Fpga TimingChauHuynhNo ratings yet
- SMA and Sofar Inverter PricelistDocument3 pagesSMA and Sofar Inverter PricelistYuvaraj JeyachandranNo ratings yet
- Tarea 1 - MIDocument6 pagesTarea 1 - MIlupitagonzalezNo ratings yet
- Pre Engineered BLD System PDFDocument104 pagesPre Engineered BLD System PDFSumanthNo ratings yet
- Dumpschema - LPGP C ENTITYDocument57 pagesDumpschema - LPGP C ENTITYSreenu VasuNo ratings yet
- Session 2: Function Block Diagram (FBD) Programming IDocument33 pagesSession 2: Function Block Diagram (FBD) Programming INói Chỉ ChuẩnNo ratings yet
- Gradle For Android - Sample ChapterDocument18 pagesGradle For Android - Sample ChapterPackt PublishingNo ratings yet
- Ultrasonic Welding PDFDocument43 pagesUltrasonic Welding PDFsanmiteNo ratings yet
- MECH448 Mid-Terms Samples 2013Document6 pagesMECH448 Mid-Terms Samples 2013Imam A. RamadhanNo ratings yet
- Adempiere Module 3 - Adempiere Basics PDFDocument28 pagesAdempiere Module 3 - Adempiere Basics PDFharunjuhaszNo ratings yet