You might also like
- Ejercicios de Ecuaciones Diferenciales OrdinariasFrom EverandEjercicios de Ecuaciones Diferenciales OrdinariasRating: 4 out of 5 stars4/5 (1)
- Unidad 4 HFDTDDocument9 pagesUnidad 4 HFDTDCristian PalominoNo ratings yet
- Ecuaciones Diferenciales Ordinarias de Primer Orden.Document19 pagesEcuaciones Diferenciales Ordinarias de Primer Orden.roberto zuritaNo ratings yet
- Sistemas de Ecuaciones Diferenciales LinealesDocument4 pagesSistemas de Ecuaciones Diferenciales LinealesRémy Artem AspemNo ratings yet
- Ecuaciones DiferencialesDocument13 pagesEcuaciones DiferencialesKarenn MontoyaNo ratings yet
- Investigacion Unidad 4 Ecuaciones DifDocument9 pagesInvestigacion Unidad 4 Ecuaciones DifCristian Ramirez HerreraNo ratings yet
- Ecuaciones Diferenciales Lineales de Alto OrdenDocument20 pagesEcuaciones Diferenciales Lineales de Alto Ordenreckor94No ratings yet
- Mat 145Document3 pagesMat 145patoumsaNo ratings yet
- Apunte Matemática Aplicada - VittarDocument32 pagesApunte Matemática Aplicada - VittarMARGARITA SORIANo ratings yet
- Sistemas de Ecuaciones Diferenciales LinealesDocument25 pagesSistemas de Ecuaciones Diferenciales LinealesCarlos KimNo ratings yet
- Investigacion Unidad 1 EcuacionesDocument46 pagesInvestigacion Unidad 1 EcuacionesMarco A.No ratings yet
- Manual Unidad 3 Ecuaciones DiferencialesDocument32 pagesManual Unidad 3 Ecuaciones DiferencialesRUBEN TAFUR R.No ratings yet
- Tema 2Document15 pagesTema 2MARCELO VELARDE HUALLPANo ratings yet
- Presentacion Ec. Diferen-Unidad IDocument28 pagesPresentacion Ec. Diferen-Unidad IJat VA100% (1)
- Ecuaciones en Diferencia y Sistemas Dinamicos DiscretosDocument24 pagesEcuaciones en Diferencia y Sistemas Dinamicos DiscretosJhonatan OrlandoNo ratings yet
- Sistemas ecuaciones diferenciales linealesDocument12 pagesSistemas ecuaciones diferenciales linealesLizbeth ZarateNo ratings yet
- TEORÍA - MCII2021-Semana11Document17 pagesTEORÍA - MCII2021-Semana11Darío RiosaNo ratings yet
- Investigación EcuacionesDocument4 pagesInvestigación EcuacionesSalvador GuzmánNo ratings yet
- Unidad 4 Ecuaciones DiferencialesDocument12 pagesUnidad 4 Ecuaciones DiferencialesJose Alfonso VnNo ratings yet
- Ecuación DiferencialDocument32 pagesEcuación DiferencialSara WiegertNo ratings yet
- Ecuación Diferencial OrdinariaDocument11 pagesEcuación Diferencial OrdinariaAnahisNo ratings yet
- Ecuaciones Diferenciales, Taller 2Document23 pagesEcuaciones Diferenciales, Taller 2Sofia NinoskaNo ratings yet
- Investigacion Unidad 2 Ecuaciones DifDocument15 pagesInvestigacion Unidad 2 Ecuaciones DifCristian Ramirez Herrera100% (1)
- Investigacion Unidad 1 Ecuaciones DifDocument19 pagesInvestigacion Unidad 1 Ecuaciones DifCristian Ramirez HerreraNo ratings yet
- tarea de investigacion 2Document9 pagestarea de investigacion 2Alexis LavariegaNo ratings yet
- Apuntes Especiales IIDocument101 pagesApuntes Especiales IIlau748No ratings yet
- InvestigacionDocument32 pagesInvestigacionAndrik HerreraNo ratings yet
- Manual Unidad 2 Ecuaciones DiferencialesDocument52 pagesManual Unidad 2 Ecuaciones DiferencialesRUBEN TAFUR R.No ratings yet
- Unidad I Ecuaciones DiferencialesDocument20 pagesUnidad I Ecuaciones DiferencialesAdolfo Salazar OrtizNo ratings yet
- Sistemas de Ecuaciones Diferenciales LinealesDocument5 pagesSistemas de Ecuaciones Diferenciales LinealesYosimar VizarreteaNo ratings yet
- Manual Unidad 3Document21 pagesManual Unidad 3MARIBEL ROJASNo ratings yet
- Ecuación DiferencialDocument8 pagesEcuación DiferencialKristhiano KunNo ratings yet
- Ecuaciones Diferenciales AutónomasDocument9 pagesEcuaciones Diferenciales AutónomasErnesto GuerreroNo ratings yet
- Ecuación DiferencialDocument12 pagesEcuación DiferencialJose Vasquez Vargas100% (1)
- Ejercicios MatematicaDocument47 pagesEjercicios MatematicaRoberto CarlosNo ratings yet
- 3ra UnidadDocument28 pages3ra UnidadLucio SifuentesNo ratings yet
- Resumen 1Document11 pagesResumen 1GUILLERMO ALDAIR GALVAN HUERTANo ratings yet
- Unidad IDocument24 pagesUnidad Ijoab100% (1)
- EcuacionesDocument20 pagesEcuacionesJames RodriguezNo ratings yet
- Sistemas de Ecuaciones Diferenciales LinealesDocument27 pagesSistemas de Ecuaciones Diferenciales LinealesAngel Nega GonzalezNo ratings yet
- Unidad 2 Ingenieria en Sistemas Luis RobertoDocument2 pagesUnidad 2 Ingenieria en Sistemas Luis RobertoLUIS ROBERTO SOBERANO JIMENEZNo ratings yet
- Ecuaciones diferenciales de segundo orden y sistemas de primer ordenDocument27 pagesEcuaciones diferenciales de segundo orden y sistemas de primer ordenJose F. HallonNo ratings yet
- Ecuaciones Diferenciales EJE 2Document16 pagesEcuaciones Diferenciales EJE 2Velandia LeonardoNo ratings yet
- Placd 2Document6 pagesPlacd 2Shondaan Cesar Santoyo BarrientosNo ratings yet
- Introducción A Las Ecuaciones en Derivadas ParcialesDocument23 pagesIntroducción A Las Ecuaciones en Derivadas ParcialesLuis A G. C.No ratings yet
- TRANSFORMADA ZETA - Guía de ClasesDocument51 pagesTRANSFORMADA ZETA - Guía de ClasesJorge CastilloNo ratings yet
- Compendio Unidad 1 Ecuaciones Diferenciales - Jairo Ramón Beltrón Cedeño - Mayo 2022 A Septiembre 2022Document62 pagesCompendio Unidad 1 Ecuaciones Diferenciales - Jairo Ramón Beltrón Cedeño - Mayo 2022 A Septiembre 2022kayla toalaNo ratings yet
- Introducción A Las Ecuaciones Diferenciales ParcialesDocument11 pagesIntroducción A Las Ecuaciones Diferenciales ParcialesEliseo Colunga SuarezNo ratings yet
- Teoría cualitativa de ecuaciones diferenciales ordinariasDocument50 pagesTeoría cualitativa de ecuaciones diferenciales ordinariasRene Daniel Rolon FleitasNo ratings yet
- Resumen de InvestigacionDocument33 pagesResumen de InvestigacionRaúl Barrios MendozaNo ratings yet
- Ecuaciones Diferenciales. Unidad 2.Document17 pagesEcuaciones Diferenciales. Unidad 2.Vane xdNo ratings yet
- FENomenos 1Document58 pagesFENomenos 1Antonio ArizmendiNo ratings yet
- Unidad 1 Ecuaciones DiferencialesDocument17 pagesUnidad 1 Ecuaciones DiferencialesKevin AldereteNo ratings yet
- Investigación U1Document15 pagesInvestigación U1a22490630No ratings yet
- Ecua - Diferenciales U.2Document22 pagesEcua - Diferenciales U.2Julio LSNo ratings yet
- Metodo de VariacionDocument17 pagesMetodo de VariacionMaria Laura Santana FlorNo ratings yet
- Ejemplario: Ecuaciones Diferenciales OrdinariasFrom EverandEjemplario: Ecuaciones Diferenciales OrdinariasNo ratings yet
- PracticaDocument9 pagesPracticaJuan José Ortiz ValderramaNo ratings yet
- GMGTETG005 Ortiz Ditta - V 0227Document154 pagesGMGTETG005 Ortiz Ditta - V 0227Juan José Ortiz Valderrama100% (2)
- Presentacion 1Document50 pagesPresentacion 1Juan José Ortiz ValderramaNo ratings yet
- Mensaje para PadresDocument4 pagesMensaje para PadresJuan José Ortiz ValderramaNo ratings yet
- 9 Matematica 2Document32 pages9 Matematica 2lennyt23No ratings yet
- Examen MF-TDocument2 pagesExamen MF-TJuan José Ortiz ValderramaNo ratings yet
- FUNCIONESDocument2 pagesFUNCIONESJuan José Ortiz ValderramaNo ratings yet
- Criterios de Evaluacion - 2015 v4 (Jjov)Document9 pagesCriterios de Evaluacion - 2015 v4 (Jjov)Juan José Ortiz ValderramaNo ratings yet
- Plan de Area Matemáticas (Séptimo2013)Document10 pagesPlan de Area Matemáticas (Séptimo2013)Juan José Ortiz ValderramaNo ratings yet
- Descomposicion FactorialDocument16 pagesDescomposicion FactorialJuan José Ortiz Valderrama100% (2)
- Organización Internacional Del Trabajo (Sandra)Document14 pagesOrganización Internacional Del Trabajo (Sandra)Juan José Ortiz ValderramaNo ratings yet
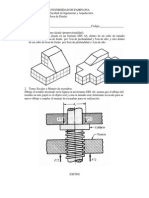
- Universidad de Pamplona Facultad de Ingenierias yDocument1 pageUniversidad de Pamplona Facultad de Ingenierias yJuan José Ortiz Valderrama100% (1)
- Trabajo ClaseDocument1 pageTrabajo ClaseJuan José Ortiz ValderramaNo ratings yet
- Mecanica AnaliticaDocument4 pagesMecanica AnaliticaJuan José Ortiz Valderrama100% (3)
- EjercicioDocument3 pagesEjercicioJuan José Ortiz Valderrama100% (3)
- DISEÑO DE MAQUINAS (Mecatronica)Document9 pagesDISEÑO DE MAQUINAS (Mecatronica)Juan José Ortiz Valderrama100% (4)
- DISEÑODocument8 pagesDISEÑOJuan José Ortiz Valderrama100% (2)
- Estática 168231Document6 pagesEstática 168231Juan José Ortiz Valderrama100% (3)
- Horarios Atencion EstudiantesDocument1 pageHorarios Atencion EstudiantesJuan José Ortiz ValderramaNo ratings yet
- Flujo en Canal AbiertoDocument31 pagesFlujo en Canal AbiertoJuan José Ortiz Valderrama92% (52)
- TURBOMAQUINARIADocument25 pagesTURBOMAQUINARIAJuan José Ortiz Valderrama100% (10)
- Propiedades de Los FluidosDocument22 pagesPropiedades de Los FluidosJuan José Ortiz Valderrama100% (85)
- Ordenes de TrabajoDocument1 pageOrdenes de TrabajoJuan José Ortiz Valderrama100% (2)
- Presión y Estática de FluidosDocument41 pagesPresión y Estática de FluidosJuan José Ortiz Valderrama99% (92)
- Procesos ManufacturaDocument1 pageProcesos ManufacturaJuan José Ortiz Valderrama100% (2)
- Formato Recibos El Lavadero (v4)Document1 pageFormato Recibos El Lavadero (v4)Juan José Ortiz Valderrama100% (3)
- Expresión Grafica IDocument1 pageExpresión Grafica IJuan José Ortiz ValderramaNo ratings yet
- Mecánica de FluidosDocument1 pageMecánica de FluidosJuan José Ortiz Valderrama100% (4)
- Manual de Instrucciones - Modelo Nómade AT - DigitalDocument12 pagesManual de Instrucciones - Modelo Nómade AT - DigitalRigobertoMedinaNo ratings yet
- .ar-ENCUADERNACIÓN AMERICANA CON CAJOS Y LOMO REDONDEADODocument28 pages.ar-ENCUADERNACIÓN AMERICANA CON CAJOS Y LOMO REDONDEADOWidcketNo ratings yet
- Variables de Secretaria de TransitoDocument3 pagesVariables de Secretaria de TransitoAngie MejiaNo ratings yet
- Agua en Las EdificacionesDocument32 pagesAgua en Las Edificacioneslukassk1No ratings yet
- Diapositiva Cadena de CustodiaDocument13 pagesDiapositiva Cadena de CustodiaJosé Luis Sánchez LondoñoNo ratings yet
- 3100 Depth MN131 1951317B Spa WebDocument12 pages3100 Depth MN131 1951317B Spa WebmartinbertoraNo ratings yet
- 3 4 1 1 Actividad de Clase Funcionamiento GarantizadoDocument2 pages3 4 1 1 Actividad de Clase Funcionamiento GarantizadoCésarJosepsNolascoCristóbalNo ratings yet
- Cómo funciona la seguridad en InternetDocument77 pagesCómo funciona la seguridad en InternetJesus Kyrie EleisonNo ratings yet
- TPM y Su Fuerte Relación Con JITDocument31 pagesTPM y Su Fuerte Relación Con JITJuanManuelBayonaArenas100% (1)
- Aplicaciones de Circuitos RC, RL y Del Transistor Como Elemento de Conmutación (Práctica)Document5 pagesAplicaciones de Circuitos RC, RL y Del Transistor Como Elemento de Conmutación (Práctica)Siul ReivajNo ratings yet
- Carrera Espacial - Guerra FríaDocument8 pagesCarrera Espacial - Guerra Fríalau.lauNo ratings yet
- Nuevas Tendencias de La Administración Industria 4.0Document19 pagesNuevas Tendencias de La Administración Industria 4.0Oscar SaldañaNo ratings yet
- Iso 6887-1-2017Document35 pagesIso 6887-1-2017Lorena Len75% (4)
- Tabla de RendimientosDocument26 pagesTabla de RendimientosJesús Valladares RosalesNo ratings yet
- Costo Del Control ConcurrenteDocument5 pagesCosto Del Control ConcurrentedoochNo ratings yet
- Efectos de La Pérdida y La Fragmentación Del Hábitat Sobre La Conservación Del Endemismo Linaria Nigricans (COMUNICACIÓN)Document23 pagesEfectos de La Pérdida y La Fragmentación Del Hábitat Sobre La Conservación Del Endemismo Linaria Nigricans (COMUNICACIÓN)Blas M. BenitoNo ratings yet
- 9-Artículo Original-187-1-10-20160512Document7 pages9-Artículo Original-187-1-10-20160512Diego VegaNo ratings yet
- Soja: prácticas, daños, intereses y cambiosDocument1 pageSoja: prácticas, daños, intereses y cambiosLorena GallardoNo ratings yet
- Planificación N°6 V Ciclo para PedroDocument20 pagesPlanificación N°6 V Ciclo para PedroNatyBia Cordova MestanzaNo ratings yet
- RESIDUOS Solidos Residuo Sólido o Desecho.: Piramide en La Gestion de ResiduosDocument12 pagesRESIDUOS Solidos Residuo Sólido o Desecho.: Piramide en La Gestion de ResiduosMelissa VergaraNo ratings yet
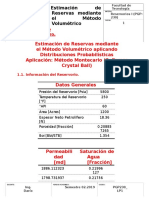
- Estimación de reservas mediante el método volumétricoDocument3 pagesEstimación de reservas mediante el método volumétricofernando4talaveraNo ratings yet
- Teorema de Bartlett BisecciónDocument7 pagesTeorema de Bartlett BisecciónDennis YucraNo ratings yet
- Adhepiso Tec®Document1 pageAdhepiso Tec®Alfredo Cruz100% (1)
- Junin EdzDocument268 pagesJunin EdzJuan Abel Callupe CuevaNo ratings yet
- Diseño de Mezclas Concreto Fast Track en Reparación y Rehabilitación deDocument6 pagesDiseño de Mezclas Concreto Fast Track en Reparación y Rehabilitación deLider Ricardo Alarcon CardenasNo ratings yet
- Manual Gestión NECDocument33 pagesManual Gestión NECyorkaef57100% (1)
- Introduccion A Garage Band 08Document107 pagesIntroduccion A Garage Band 08b03ticNo ratings yet
- Informe Ptar - CelendinDocument18 pagesInforme Ptar - CelendinJulio Zambrano Novoa100% (1)
- Analisis Critico Sobre Las Tendencias Del Comercio Internacional en VenezuelaDocument5 pagesAnalisis Critico Sobre Las Tendencias Del Comercio Internacional en VenezuelaKarelys Guerra100% (1)
- HidraulicaDocument97 pagesHidraulicaxeveregodoyNo ratings yet