You might also like
- NR 10 CursoDocument89 pagesNR 10 CursoWalter Junior100% (1)
- ABNT NBR 6494 Segurança Nos AndaimesDocument5 pagesABNT NBR 6494 Segurança Nos AndaimesAntonio Fernando Navarro100% (3)
- Manual Do Visteon VSB-8706 CompletoDocument26 pagesManual Do Visteon VSB-8706 Completoleonardoeng175% (8)
- Curso Pro-ElétricaDocument441 pagesCurso Pro-Elétricavrengel100% (1)
- Senai Servo-AcionamentosDocument38 pagesSenai Servo-AcionamentosJanderson Pereira100% (2)
- Projeto Dimensionamento de EixoDocument29 pagesProjeto Dimensionamento de EixomichelNo ratings yet
- Hidráulica CCE0217: Engenharia Civil 2017/1 Paulo Cesar Martins PenteadoDocument83 pagesHidráulica CCE0217: Engenharia Civil 2017/1 Paulo Cesar Martins PenteadoGilberto Goulart SouzaNo ratings yet
- Manual Pós-Vendas KMB VS1.0Document67 pagesManual Pós-Vendas KMB VS1.0DouglasNo ratings yet
- Gestão da manutenção de um aquárioDocument33 pagesGestão da manutenção de um aquárioECSilva12100% (1)
- Elementos de Navegação CosteiraDocument56 pagesElementos de Navegação CosteirajoaotgilNo ratings yet
- Manual Correção Fator de Potência PotDocument34 pagesManual Correção Fator de Potência PotLuiz UshijimaNo ratings yet
- Permissão Trabalho Elétrico Baixa TensãoDocument1 pagePermissão Trabalho Elétrico Baixa TensãoMarcelo Camilo Machado Camilo100% (1)
- Como Funcionam As Fontes ChaveadasDocument8 pagesComo Funcionam As Fontes ChaveadasReinaldo Oliveira100% (2)
- Environ v2.6 - Apostila de TreinamentoDocument78 pagesEnviron v2.6 - Apostila de TreinamentoGabrieli JungerNo ratings yet
- Aluminio - SenaiDocument13 pagesAluminio - SenaiSR71bNo ratings yet
- Universo e Vida - Áureo - Hernani T SantannaDocument88 pagesUniverso e Vida - Áureo - Hernani T SantannaAmorphis Brazil100% (3)
- Motores CC: trilha técnica de manutençãoDocument95 pagesMotores CC: trilha técnica de manutençãoBrendon ThiagoNo ratings yet
- Projeto de rede de baixa tensão aérea para PT de 630kVADocument43 pagesProjeto de rede de baixa tensão aérea para PT de 630kVAJeremias Pascoal100% (2)
- NBR 07367 NB 281 - Projeto e Assent Amen To de Tubulacoes de PVC Rigido para Sistemas de Esgoto SanitarioDocument17 pagesNBR 07367 NB 281 - Projeto e Assent Amen To de Tubulacoes de PVC Rigido para Sistemas de Esgoto SanitarioJersé Messias100% (5)
- DT 6 - Motores Elétricos de Indução Trifásicos de Baixa e Alta TensãoDocument102 pagesDT 6 - Motores Elétricos de Indução Trifásicos de Baixa e Alta TensãoCarlos Augusto CarvalhoNo ratings yet
- Manual Tecnico Moura Solar MS V1.4 POTDocument46 pagesManual Tecnico Moura Solar MS V1.4 POTFernando E RomeroNo ratings yet
- Material de Apoio - Sistemas FluidomecanicosDocument21 pagesMaterial de Apoio - Sistemas FluidomecanicosmicellicamargoNo ratings yet
- Memorial DescritivoDocument2 pagesMemorial DescritivoRenato SeganfredoNo ratings yet
- Noções de Electromagnetismo e Circuitos MagnéticosDocument99 pagesNoções de Electromagnetismo e Circuitos MagnéticosFábio MoraisNo ratings yet
- Manual Tecnico Moura Solar MFV V5 PORTDocument58 pagesManual Tecnico Moura Solar MFV V5 PORTedsonleviNo ratings yet
- Livro - Fundamentos de Engenharia GeotécnicaDocument20 pagesLivro - Fundamentos de Engenharia GeotécnicaMaria Da Conceição PatricioNo ratings yet
- 1 - 2 - Descricao Mecanica Dos Motores Rev JMC 13.10.2012Document90 pages1 - 2 - Descricao Mecanica Dos Motores Rev JMC 13.10.2012pedromartinscoelho100% (1)
- Geradores, motores, alternadores e transformadores elétricosDocument55 pagesGeradores, motores, alternadores e transformadores elétricosIagoFernandesNo ratings yet
- PM Chiziane FinalDocument110 pagesPM Chiziane FinalJulio joaquim tembisseNo ratings yet
- Alinhamento PDFDocument55 pagesAlinhamento PDFosmar_copertecNo ratings yet
- Tecnologia Aerogeradores UFMGDocument58 pagesTecnologia Aerogeradores UFMGAldo RaquitaNo ratings yet
- Excel Básico para IniciantesDocument85 pagesExcel Básico para IniciantesBRENO SILVANo ratings yet
- EIV - Fábio SilvaDocument56 pagesEIV - Fábio SilvaCintia Assis do AmaralNo ratings yet
- Projecto de Engenharia Mecanica 2022 Projecto TipoDocument41 pagesProjecto de Engenharia Mecanica 2022 Projecto TipoKelven pedroNo ratings yet
- Manual para Correcao Do Fator de PotenciDocument29 pagesManual para Correcao Do Fator de PotenciBruno AugustoNo ratings yet
- TCC - Bruno Bermudes e Daniel Lucca - Versao FinalDocument67 pagesTCC - Bruno Bermudes e Daniel Lucca - Versao FinalJulcemar FelipeNo ratings yet
- Radier Protendido - ADAPT MATDocument377 pagesRadier Protendido - ADAPT MATLuiz PauloNo ratings yet
- Cm1 - 1 - Memória de CálculoDocument27 pagesCm1 - 1 - Memória de CálculoCristiano OliveiraNo ratings yet
- MF Trab Ansys SV 19 20Document53 pagesMF Trab Ansys SV 19 20Diogo TabordaNo ratings yet
- Manual Remota Água BC250 3G Rev3Document33 pagesManual Remota Água BC250 3G Rev3Antônio Lima RodriguesNo ratings yet
- EletrecidadeDocument84 pagesEletrecidadeFrancisco Font BellNo ratings yet
- Proteção e comandos elétricos de motoresDocument122 pagesProteção e comandos elétricos de motoresNAURI LEITENo ratings yet
- Capacidade de Tráfego e Numero N OficialDocument32 pagesCapacidade de Tráfego e Numero N OficialYandra MotaNo ratings yet
- Apostila sobre acionamentos elétricos de motoresDocument122 pagesApostila sobre acionamentos elétricos de motoresNAURI LEITENo ratings yet
- Folhas FMEDocument213 pagesFolhas FMEDuarte MotaNo ratings yet
- Projeto elétrico industrialDocument57 pagesProjeto elétrico industrialGilberto Silva100% (1)
- Projeto de acionamento de cabrestante com motor elétricoDocument119 pagesProjeto de acionamento de cabrestante com motor elétricoIsvildio Benjamim Uatherra67% (3)
- TAI5 ConversobombaturbinaDocument31 pagesTAI5 ConversobombaturbinaPedro C ANo ratings yet
- Formulário para o Cálculo de Estruturas de Concreto Armado-V6Document17 pagesFormulário para o Cálculo de Estruturas de Concreto Armado-V6Pedro ArthurNo ratings yet
- PM NawereDocument70 pagesPM NawereRAFAEL JOSE MOLIDE JUNIORNo ratings yet
- Manual UFC2 3 4 5 7Document149 pagesManual UFC2 3 4 5 7Anonymous GhJKML5CNo ratings yet
- Fuel Tech RacePRO-1FiDocument91 pagesFuel Tech RacePRO-1FilucianoNo ratings yet
- 04 SUMARIO - Xi XviDocument6 pages04 SUMARIO - Xi XviVITOR VALERIO ROCHA VASCONCELOSNo ratings yet
- Nomas para Elaboração Do Trabalho de Conclusão de CursoDocument45 pagesNomas para Elaboração Do Trabalho de Conclusão de CursoElder Fabiano da SilvaNo ratings yet
- Guia de Estudos de Máquinas Elétricas e TransformadoresDocument67 pagesGuia de Estudos de Máquinas Elétricas e TransformadoresDinael MilaniNo ratings yet
- 2020 AlexandreAlcantaraDeOliveira TCCDocument44 pages2020 AlexandreAlcantaraDeOliveira TCCRoger OliveiraNo ratings yet
- Máquinas Elétricas e Transformadores_231214_151333Document67 pagesMáquinas Elétricas e Transformadores_231214_151333eubonito03No ratings yet
- Conversão Eletromecânica de Energia - Joel Rocha PintoDocument205 pagesConversão Eletromecânica de Energia - Joel Rocha PintoPauloNo ratings yet
- Apostila - Sistema Eletrico de Locomotivas - REV 01 - 02-2017Document97 pagesApostila - Sistema Eletrico de Locomotivas - REV 01 - 02-2017Marques Eugénio SamboNo ratings yet
- G Series Catalogo ROSSI PTDocument482 pagesG Series Catalogo ROSSI PTViniciusNo ratings yet
- Processo de Dimensionamento de Correias TransportadorasDocument97 pagesProcesso de Dimensionamento de Correias TransportadorasEmanuel VictorNo ratings yet
- Universidad Nacional Tecnológica de Lima Sur: Escuela Profesional de Ingeniería Mecánica Y EléctricaDocument80 pagesUniversidad Nacional Tecnológica de Lima Sur: Escuela Profesional de Ingeniería Mecánica Y EléctricaalvarezalvarezNo ratings yet
- Análise de Estabilidade Global de Estruturas de Concreto em Usinas HidrelétricasDocument84 pagesAnálise de Estabilidade Global de Estruturas de Concreto em Usinas Hidrelétricastarcizocruz100% (6)
- Chiulele PDFDocument100 pagesChiulele PDFJulio joaquim tembisseNo ratings yet
- Mecânica AplicadaDocument67 pagesMecânica AplicadaJonathanMendesNo ratings yet
- Por Que Os Jovens BebemDocument2 pagesPor Que Os Jovens BebemMyrlena RaquellyNo ratings yet
- Barros AlexandreDocument99 pagesBarros AlexandreMyrlena RaquellyNo ratings yet
- Case EolicaDocument13 pagesCase EolicaMyrlena RaquellyNo ratings yet
- Java Programação BásicaDocument124 pagesJava Programação BásicaLuiz Alexandre Araujo TobaseNo ratings yet
- Conteudo 3 ProvaDocument1 pageConteudo 3 ProvaMyrlena RaquellyNo ratings yet
- GPT 6Document9 pagesGPT 6Myrlena RaquellyNo ratings yet
- Motor Ese Let RicosDocument36 pagesMotor Ese Let RicosAdilson AlbertoNo ratings yet
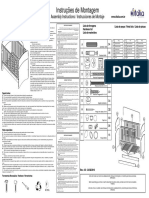
- Manual Berço CamaDocument5 pagesManual Berço CamaedojapzNo ratings yet
- Usi StarDocument21 pagesUsi Starqualidade1fameqNo ratings yet
- 17-02 - APS - EXTRACaO - PASTEURIZACaO PDFDocument32 pages17-02 - APS - EXTRACaO - PASTEURIZACaO PDFGaston Eteban Farias DroguettNo ratings yet
- Catalogo Produtos AssisparDocument30 pagesCatalogo Produtos AssisparJuarez LeiteNo ratings yet
- Propagação de Trincas Por FadigaDocument105 pagesPropagação de Trincas Por FadigaJoão CarlosNo ratings yet
- TCC Jonatas Fritz Versao FinalDocument101 pagesTCC Jonatas Fritz Versao FinalFelipe MacielNo ratings yet
- Motivação e Satisfação Pessoal No TrabalhoDocument1 pageMotivação e Satisfação Pessoal No TrabalhoEugenio Bento Ferreira CidadeNo ratings yet
- Evolução dos Modelos AtômicosDocument7 pagesEvolução dos Modelos AtômicosRafaela Malta CarvalhoNo ratings yet
- Distribuição eletrônicaDocument10 pagesDistribuição eletrônicaNei Silva100% (1)
- Amplificadores Operacionais: Características e AplicaçõesDocument12 pagesAmplificadores Operacionais: Características e AplicaçõesbrenilssonNo ratings yet
- Curso SerigrafiaDocument33 pagesCurso SerigrafiaDeivison Gustavo100% (1)
- Experiência de Oersted revela relação entre corrente elétrica e campo magnéticoDocument6 pagesExperiência de Oersted revela relação entre corrente elétrica e campo magnéticoPesnesaNo ratings yet
- Funções côncavas e quasecôncavas propriedadesDocument4 pagesFunções côncavas e quasecôncavas propriedadesHayatahandeson Borges de CaldasNo ratings yet
- ESFERADocument8 pagesESFERARocha RochaNo ratings yet
- UEPB - CCT - DEPARTAMENTO DE FÍSICA - ELETROMAGNETISMO - LISTA DE EXERCÍCIOSDocument2 pagesUEPB - CCT - DEPARTAMENTO DE FÍSICA - ELETROMAGNETISMO - LISTA DE EXERCÍCIOSDavi Cardoso da SilvaNo ratings yet
- DETERMINAÇÃO ESPECTROFOTOMÉTRICA DE ÍONS Co (II) E CR (III) EM UMA MISTURADocument9 pagesDETERMINAÇÃO ESPECTROFOTOMÉTRICA DE ÍONS Co (II) E CR (III) EM UMA MISTURAfabianamlNo ratings yet
- Aula23 TH018 2015Document27 pagesAula23 TH018 2015Marcio SepulviaNo ratings yet
- Manual operação etiquetador 351Document62 pagesManual operação etiquetador 351Rodrigo Muniz100% (1)