You might also like
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- 4 1 Mass Spring Free ResponseDocument15 pages4 1 Mass Spring Free ResponseAbel PachecoNo ratings yet
- 1 Way SlabDocument12 pages1 Way SlabSemahegn GebiruNo ratings yet
- Differential Equations in MapleDocument14 pagesDifferential Equations in MapleAscanio BarbosaNo ratings yet
- RCCe11 Element DesignDocument9 pagesRCCe11 Element Designrelu59No ratings yet
- Thin and Thick Cylinders - SolvedDocument12 pagesThin and Thick Cylinders - SolvedsakuNo ratings yet
- Example of Gaussian EliminationDocument4 pagesExample of Gaussian Eliminationloserboi101No ratings yet
- Math207 HW3Document2 pagesMath207 HW3PramodNo ratings yet
- Newton's Divided Difference Interpolation FormulaDocument31 pagesNewton's Divided Difference Interpolation FormulaAnuraj N VNo ratings yet
- Ch#2 Stiffness MethodDocument24 pagesCh#2 Stiffness MethodMegaPradiptaFainallaziNo ratings yet
- Module 15 Trigonomeertric FunctionsDocument32 pagesModule 15 Trigonomeertric Functionsbakaraz7523027No ratings yet
- Assignment-1 (Linear Algebra)Document3 pagesAssignment-1 (Linear Algebra)DEBOJIT CHATTERJEENo ratings yet
- Calculation of Roof WeightDocument6 pagesCalculation of Roof WeightAnonymous pmwNrPum1CNo ratings yet
- Lecture 2Document9 pagesLecture 2fujinlim98No ratings yet
- RC Design I ColumnsDocument32 pagesRC Design I Columnseph100% (1)
- Matched Asymptotic Expansion Solution5Document7 pagesMatched Asymptotic Expansion Solution5Michael James Miller100% (1)
- Errata for Introductory Mathematics TextbookDocument4 pagesErrata for Introductory Mathematics TextbookAnh-Vu NguyenNo ratings yet
- Tutorial Letter 201/1/2013: Calculus ADocument9 pagesTutorial Letter 201/1/2013: Calculus AKhathutshelo KharivheNo ratings yet
- A.MAULANA MALIK MH Dinamika Struktur c10Document6 pagesA.MAULANA MALIK MH Dinamika Struktur c10Maulana MalikNo ratings yet
- ESO 208A: Computational Methods in Engineering: Tutorial 4Document3 pagesESO 208A: Computational Methods in Engineering: Tutorial 4jana.elmasry.9277No ratings yet
- Gec220 Lecture 2 Total Differential Chain Rule Implicit Function PDFDocument14 pagesGec220 Lecture 2 Total Differential Chain Rule Implicit Function PDFnyenookeNo ratings yet
- MAT101-Engineering Mathematics-I Differential Calculus-4: Rolle's Theorem StatementDocument11 pagesMAT101-Engineering Mathematics-I Differential Calculus-4: Rolle's Theorem StatementTorcoxk Namgay100% (1)
- 2Z03 Final SolDocument24 pages2Z03 Final SolAbha Hameed100% (1)
- Bitsat Paper 03Document21 pagesBitsat Paper 03Arnab SenNo ratings yet
- Slabs - Moment RedistributionDocument20 pagesSlabs - Moment RedistributionHeng Si HwaNo ratings yet
- WEEK 5 SOLUTION METHODS FOR SIMULTANEOUS NLEs 2Document35 pagesWEEK 5 SOLUTION METHODS FOR SIMULTANEOUS NLEs 2Demas JatiNo ratings yet
- Grillage Analysis of Composite Concrete Slab On Steel Beams With Partial InteractionDocument20 pagesGrillage Analysis of Composite Concrete Slab On Steel Beams With Partial InteractionPham Song HongNo ratings yet
- 13.theories of Failure PDFDocument12 pages13.theories of Failure PDFharshdeepNo ratings yet
- Modeller Reference ManualDocument488 pagesModeller Reference Manuallucagav89No ratings yet
- Chapter 9. Design of ColumnDocument14 pagesChapter 9. Design of ColumnDelina TedrosNo ratings yet
- Assignment 6 1386142Document4 pagesAssignment 6 1386142DuncanNo ratings yet
- Digital Control System Final Exam QuestionsDocument13 pagesDigital Control System Final Exam QuestionsNiaz ManikNo ratings yet
- P2Document5 pagesP2NmNo ratings yet
- Tutorial Letter 201/1/2017: Calculus ADocument10 pagesTutorial Letter 201/1/2017: Calculus AKhathutshelo KharivheNo ratings yet
- Continuum Mech ProblemsDocument85 pagesContinuum Mech ProblemsDeepak Verma100% (1)
- Calculating the dimensions of a reinforced concrete column foundationDocument28 pagesCalculating the dimensions of a reinforced concrete column foundationMoebbiussNo ratings yet
- Method of Finite DifferencesDocument3 pagesMethod of Finite DifferenceshlvijaykumarNo ratings yet
- Vibration of Single Degree of Freedom SystemDocument31 pagesVibration of Single Degree of Freedom SystemEnriqueGDNo ratings yet
- Gauss Seidel MethodRTFDocument5 pagesGauss Seidel MethodRTFChristed aljo barrogaNo ratings yet
- Rayleigh RitzDocument10 pagesRayleigh RitzGeorge Alexander El-MallakhNo ratings yet
- UEM Sol To Exerc Chap 029Document35 pagesUEM Sol To Exerc Chap 029syedmukaddimNo ratings yet
- Mesh BasicsDocument45 pagesMesh BasicsS.M. Atiqur RahmanNo ratings yet
- Matlab Methods For OdeDocument16 pagesMatlab Methods For OdeGrassrehLeNo ratings yet
- Finite Element Formulation and Analysis of Bar and Beam ElementsDocument33 pagesFinite Element Formulation and Analysis of Bar and Beam Elementstharindu_ishan8651No ratings yet
- Cantileveer Natural FrequencyDocument3 pagesCantileveer Natural FrequencySiva PrasadNo ratings yet
- Shear Link Simply SupportDocument4 pagesShear Link Simply SupportShakir Naim Che ManNo ratings yet
- MATLAB Basics in 40 CharactersDocument50 pagesMATLAB Basics in 40 CharactersOleg ZenderNo ratings yet
- Effect of Self Weight On A Cantilever Beam: ANSYS Command ListingDocument2 pagesEffect of Self Weight On A Cantilever Beam: ANSYS Command ListingHaris MunirNo ratings yet
- Unit - II-TPDEDocument45 pagesUnit - II-TPDEAmal_YaguNo ratings yet
- MAT244 Khanin MIDTERM SOLUTIONSDocument3 pagesMAT244 Khanin MIDTERM SOLUTIONSRevownSadaNo ratings yet
- Alya Haura Melani - Tugas 2 Beton 2 - 3 TKG 2Document6 pagesAlya Haura Melani - Tugas 2 Beton 2 - 3 TKG 2fahira khairaniNo ratings yet
- Measure Pitch DiameterDocument16 pagesMeasure Pitch DiameterShubham Kumar Thakur50% (2)
- Parametric CurvesDocument16 pagesParametric CurvesSayan PalNo ratings yet
- MATLAB Programming on Nov 7 - Unconstrained & Constrained ProblemsDocument3 pagesMATLAB Programming on Nov 7 - Unconstrained & Constrained ProblemsMulyanto MulyonoNo ratings yet
- Komnum UASDocument8 pagesKomnum UASRusli NurdinNo ratings yet
- Materi 2-Fungsi LainDocument20 pagesMateri 2-Fungsi LainamsstkNo ratings yet
- Optimization For DummiesDocument5 pagesOptimization For DummiesMauricio BedoyaNo ratings yet
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- MATLAB and Its Application - Final 2009 - 1 - 14 - PDFDocument2 pagesMATLAB and Its Application - Final 2009 - 1 - 14 - PDFAugusto De La Cruz CamayoNo ratings yet
- 6 Linear Algebraic Equations PDFDocument68 pages6 Linear Algebraic Equations PDFAugusto De La Cruz CamayoNo ratings yet
- 2 Array and Matrix Operations PDFDocument39 pages2 Array and Matrix Operations PDFAugusto De La Cruz CamayoNo ratings yet
- Chemical Engineering Plant Cost Index, 1950 To 2015Document1 pageChemical Engineering Plant Cost Index, 1950 To 2015Bianchi Benavides0% (1)
- 13 Problem Solving With MATLAB PDFDocument64 pages13 Problem Solving With MATLAB PDFAugusto De La Cruz CamayoNo ratings yet
- Mid (Solution) PDFDocument6 pagesMid (Solution) PDFAugusto De La Cruz CamayoNo ratings yet
- Exam 1 PDFDocument1 pageExam 1 PDFAugusto De La Cruz CamayoNo ratings yet
- 14 Advanced Techniques in Problem Solving PDFDocument58 pages14 Advanced Techniques in Problem Solving PDFAugusto De La Cruz CamayoNo ratings yet
- Exam1 (Solution) PDFDocument6 pagesExam1 (Solution) PDFAugusto De La Cruz CamayoNo ratings yet
- 5 Functions and Files PDFDocument35 pages5 Functions and Files PDFAugusto De La Cruz CamayoNo ratings yet
- 13 Problem Solving With MATLAB PDFDocument64 pages13 Problem Solving With MATLAB PDFAugusto De La Cruz CamayoNo ratings yet
- 12 Regression and Correlation of Data PDFDocument123 pages12 Regression and Correlation of Data PDFAugusto De La Cruz CamayoNo ratings yet
- 11 Basic Principles and CalculationsDocument64 pages11 Basic Principles and CalculationsJue RasepNo ratings yet
- 10 Simulink PDFDocument32 pages10 Simulink PDFAugusto De La Cruz Camayo100% (1)
- 7 Linear Algebraic Equations PDFDocument69 pages7 Linear Algebraic Equations PDFAugusto De La Cruz CamayoNo ratings yet
- 8 Probability, Statistics and Interpolation PDFDocument86 pages8 Probability, Statistics and Interpolation PDFAugusto De La Cruz CamayoNo ratings yet
- 6 Programming With MATLAB PDFDocument66 pages6 Programming With MATLAB PDFAugusto De La Cruz CamayoNo ratings yet
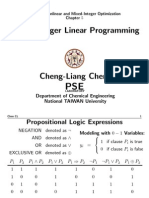
- 8 Mixed-Integer Linear Programming PDFDocument70 pages8 Mixed-Integer Linear Programming PDFAugusto De La Cruz CamayoNo ratings yet
- 4 Array and Matrix Operations PDFDocument65 pages4 Array and Matrix Operations PDFAugusto De La Cruz CamayoNo ratings yet
- Engineering Programming and Computation using MATLABDocument26 pagesEngineering Programming and Computation using MATLABAugusto De La Cruz CamayoNo ratings yet
- 1 An Overview of MATLAB PDFDocument54 pages1 An Overview of MATLAB PDFAugusto De La Cruz CamayoNo ratings yet
- 3 Commands-Based MATLAB Plotting PDFDocument27 pages3 Commands-Based MATLAB Plotting PDFAugusto De La Cruz CamayoNo ratings yet
- 11 Synthesis of Heat Exchanger Networks PDFDocument54 pages11 Synthesis of Heat Exchanger Networks PDFAugusto De La Cruz CamayoNo ratings yet
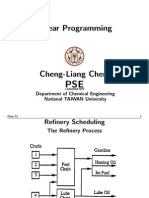
- 4 Linear Programming PDFDocument202 pages4 Linear Programming PDFAugusto De La Cruz CamayoNo ratings yet
- 5 Numerical Methods For Unconstrained Optimization PDFDocument95 pages5 Numerical Methods For Unconstrained Optimization PDFAugusto De La Cruz CamayoNo ratings yet
- 6 Numerical Methods For Constrained Optimization PDFDocument137 pages6 Numerical Methods For Constrained Optimization PDFAugusto De La Cruz Camayo100% (1)
- 9 Process Synthesis PDFDocument33 pages9 Process Synthesis PDFAugusto De La Cruz CamayoNo ratings yet
- 2 Optimum Design Problem Formulation PDFDocument49 pages2 Optimum Design Problem Formulation PDFAugusto De La Cruz CamayoNo ratings yet
- 1 Introduction To Optimum Design PDFDocument15 pages1 Introduction To Optimum Design PDFAugusto De La Cruz CamayoNo ratings yet
- Sri Dakshinamurthy Stotram - Hindupedia, The Hindu EncyclopediaDocument7 pagesSri Dakshinamurthy Stotram - Hindupedia, The Hindu Encyclopediamachnik1486624No ratings yet
- WORKSHOP ON ACCOUNTING OF IJARAHDocument12 pagesWORKSHOP ON ACCOUNTING OF IJARAHAkif ShaikhNo ratings yet
- Goan Bread Tradition Questions AnsweredDocument2 pagesGoan Bread Tradition Questions AnsweredPreeti SharmaNo ratings yet
- Speed of Sound and its Relationship with TemperatureDocument2 pagesSpeed of Sound and its Relationship with TemperatureBENNY CALLONo ratings yet
- Foundation of Special and Inclusive EducationDocument25 pagesFoundation of Special and Inclusive Educationmarjory empredoNo ratings yet
- Epithelial and connective tissue types in the human bodyDocument4 pagesEpithelial and connective tissue types in the human bodyrenee belle isturisNo ratings yet
- Scent of Apples: Does The Author Make Us Think Seriously of Life? Why Do You Say So?Document2 pagesScent of Apples: Does The Author Make Us Think Seriously of Life? Why Do You Say So?carl tom BondiNo ratings yet
- INTERNSHIP REPORT 3 PagesDocument4 pagesINTERNSHIP REPORT 3 Pagesali333444No ratings yet
- Handout of English For PsychologyDocument75 pagesHandout of English For PsychologyRivan Dwi AriantoNo ratings yet
- Grade 10 To 12 English Amplified PamphletDocument59 pagesGrade 10 To 12 English Amplified PamphletChikuta ShingaliliNo ratings yet
- VIII MKL Duet I Etap 2018 Angielski Arkusz Dla PiszącegoDocument5 pagesVIII MKL Duet I Etap 2018 Angielski Arkusz Dla PiszącegoKamilNo ratings yet
- Soal Paket 1Document10 pagesSoal Paket 1Nurul HayatiNo ratings yet
- Geometry Solving Problems (Circles)Document36 pagesGeometry Solving Problems (Circles)Hero MirasolNo ratings yet
- Life and Works of Jose RizalDocument5 pagesLife and Works of Jose Rizalnjdc1402No ratings yet
- Longman - New Total English Elementary Video BankDocument26 pagesLongman - New Total English Elementary Video Bankyuli100% (1)
- OEO105020 LTE ERAN2.2 Connection Management Feature ISSUE 1.00Document52 pagesOEO105020 LTE ERAN2.2 Connection Management Feature ISSUE 1.00Daniel YulistianNo ratings yet
- The Ontological Argument.: A Basic IntroductionDocument12 pagesThe Ontological Argument.: A Basic IntroductionJas PalNo ratings yet
- A Cautionary Tale of Psychoanalysis and SchizophreniaDocument30 pagesA Cautionary Tale of Psychoanalysis and SchizophreniaJona JoyNo ratings yet
- Technical Specifications For The: LAMBDA 950 UV/Vis/NIR and LAMBDA 850 UV/Vis SpectrophotometersDocument4 pagesTechnical Specifications For The: LAMBDA 950 UV/Vis/NIR and LAMBDA 850 UV/Vis SpectrophotometersDiogo GálicoNo ratings yet
- BCOM 302 BookDocument179 pagesBCOM 302 BookHitanshi AgarwalNo ratings yet
- The Meaning of Al FatihaDocument11 pagesThe Meaning of Al Fatihammhoward20No ratings yet
- Verbs Followed by GerundsDocument10 pagesVerbs Followed by GerundsJhan MartinezNo ratings yet
- Connectors/Conjunctions: Intermediate English GrammarDocument9 pagesConnectors/Conjunctions: Intermediate English GrammarExe Nif EnsteinNo ratings yet
- Mil HDBK 1390 PDFDocument31 pagesMil HDBK 1390 PDFsleepanon4362No ratings yet
- Comprehension Used ToDocument2 pagesComprehension Used TomarialecortezNo ratings yet
- Neoclassicism: Romanticism Realism ImpressionismDocument16 pagesNeoclassicism: Romanticism Realism ImpressionismErika EludoNo ratings yet
- Primer To Using Stampplot® Pro Standard User LicensedDocument21 pagesPrimer To Using Stampplot® Pro Standard User LicensedSandy Rachman AdrianNo ratings yet
- Psychology - A Separate PeaceDocument2 pagesPsychology - A Separate PeacevasudhaaaaaNo ratings yet
- Umair Mazher ThesisDocument44 pagesUmair Mazher Thesisumair_mazherNo ratings yet