You might also like
- Las Especificaciones Del Dibujo en Ingeniera RESUMENDocument4 pagesLas Especificaciones Del Dibujo en Ingeniera RESUMENGerardo Daniel Zaleta Osorio100% (2)
- Lista de Requisitos para Hacer ExpedientesDocument1 pageLista de Requisitos para Hacer ExpedientesGerardo Daniel Zaleta OsorioNo ratings yet
- Wellcap Nivel I - PemexDocument197 pagesWellcap Nivel I - PemexjhonnNo ratings yet
- Arranque A Tension ReducidaDocument2 pagesArranque A Tension ReducidaAsgard UriasNo ratings yet
- Guía pago derechos pasaporte SREDocument1 pageGuía pago derechos pasaporte SREManuel RamosNo ratings yet
- ServosDocument3 pagesServoseeindustrialNo ratings yet
- Marco TeoricoDocument5 pagesMarco TeoricoGerardo Daniel Zaleta OsorioNo ratings yet
- 20 Preguntas para Tu ParejaDocument2 pages20 Preguntas para Tu ParejaGerardo Daniel Zaleta OsorioNo ratings yet
- Emergencias 19 Al 31 de Diciembre 2022Document180 pagesEmergencias 19 Al 31 de Diciembre 2022Ferchand EncisoNo ratings yet
- Ensayo de Propiedades de Cimentacion de Diferentes Tipos de Suelo y RocasDocument10 pagesEnsayo de Propiedades de Cimentacion de Diferentes Tipos de Suelo y RocasFernandaTuzNo ratings yet
- 01ar9 Arq RNDocument1 page01ar9 Arq RNHernan Javier Cano RiveroNo ratings yet
- Perfiles suelos oficinasDocument3 pagesPerfiles suelos oficinasDaniela Milan Noels100% (1)
- ABUMNDocument7 pagesABUMNSilvia MazuelaNo ratings yet
- Teoría de Fuller y ThompsonDocument5 pagesTeoría de Fuller y ThompsonCarlos A. Vidal B.100% (1)
- 01-Estudio de Mejora de Eficiencia Energética en Instalaciones FrigoríficasDocument14 pages01-Estudio de Mejora de Eficiencia Energética en Instalaciones FrigoríficasaparherNo ratings yet
- Metales en La America AntiguaDocument4 pagesMetales en La America AntiguaJhon AcevedoNo ratings yet
- 1.2.1.13 Lab - Investigación de Los Componentes de La PCDocument5 pages1.2.1.13 Lab - Investigación de Los Componentes de La PCDanilo Philco ApazaNo ratings yet
- Tasaciones ChileDocument69 pagesTasaciones ChileRegularización Concón100% (1)
- Simulación de cascada neumática para secuencia A+B+A-BDocument7 pagesSimulación de cascada neumática para secuencia A+B+A-BAndres SoriaNo ratings yet
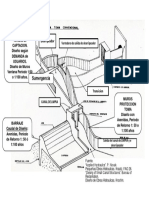
- Diseño de BocatomasDocument1 pageDiseño de BocatomasLG Bim RevitNo ratings yet
- Corrosión en MotoresDocument15 pagesCorrosión en MotoresTania MarisolNo ratings yet
- Nomenclatura de Engranes RectosDocument5 pagesNomenclatura de Engranes Rectosangelpayan1044No ratings yet
- Modulo de Base de Datos IDocument57 pagesModulo de Base de Datos IMiguel Sagñay Rea100% (1)
- Cartilla Mampostería Confinada PDFDocument68 pagesCartilla Mampostería Confinada PDFWilmer Alexander Sanchez GomezNo ratings yet
- Conservas de Esparragos Trabajo MejoradoDocument13 pagesConservas de Esparragos Trabajo Mejoradomaximo palomino rodasNo ratings yet
- Manual Ups ForzaDocument3 pagesManual Ups ForzaCesar Eduardo Salazar OsorioNo ratings yet
- Manual de válvulas a solenoide y controles de nivel para refrigeraciónDocument41 pagesManual de válvulas a solenoide y controles de nivel para refrigeraciónVENTAS TODIMEXNo ratings yet
- Resistencia agregado abrasiónDocument9 pagesResistencia agregado abrasiónVania Cristell BustamanteNo ratings yet
- Sistemas de Contención Vial Conceptos y Últimas Tecnologías, Sesión 2Document94 pagesSistemas de Contención Vial Conceptos y Últimas Tecnologías, Sesión 2Leonardo Sierra TapiasNo ratings yet
- Repaso 26 30 31Document17 pagesRepaso 26 30 31Sebastian Romero100% (1)
- Estadistica 2Document7 pagesEstadistica 2sharon montesNo ratings yet
- Inventarios Mapa ConceptualDocument1 pageInventarios Mapa ConceptualCamilo Andres Hernández Petro100% (1)
- Tipos de devoluciones frecuentes en la logística inversaDocument24 pagesTipos de devoluciones frecuentes en la logística inversaOfilara - Impress100% (1)
- Bomba de Engranajes Externos.Document15 pagesBomba de Engranajes Externos.J Benito MartinezNo ratings yet
- Libro de Control de Clases: #Orden de CompraDocument8 pagesLibro de Control de Clases: #Orden de CompraSussy Ortiz MercadoNo ratings yet
- Nte Inen 2956 PDFDocument13 pagesNte Inen 2956 PDFDaniel MaGaNo ratings yet
- PIP Mejoramiento de Sistema de Riego en Jarocollo - ArequipaDocument6 pagesPIP Mejoramiento de Sistema de Riego en Jarocollo - ArequipaJhordy AguilarNo ratings yet
- Ficha Tecnica V-SERIES Lineas de RestriccionDocument1 pageFicha Tecnica V-SERIES Lineas de RestriccionHenry1249100% (1)