Professional Documents
Culture Documents
Alarmas R 30ia 1
Uploaded by
Juan Francisco Sanchez MassadiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Alarmas R 30ia 1
Uploaded by
Juan Francisco Sanchez MassadiCopyright:
Available Formats
APENDICE D
B-82284ES-3/01
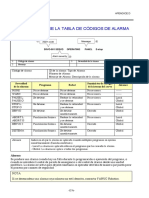
D.1 DESCRIPCN DE LA TABLA DE CDIGOS DE ALARMA
1
2
Cdigo de alarma
Mensaje
Cdigo de alarma
Severidad
de la alarma
NONE
WARN
PAUSE.L
PAUSE.G
STOP.L
STOP.G
SERVO
ID de la alarma: Tipo de Alarma
Nmero de Alarma
Mensaje de Alarma: Descripcin de la alarma
Programa
No se detiene.
No se detiene.
Se detiene.
Se detiene.
Se detiene.
ABORT.L
ABORT.G
SERVO 2
Finalizacin forzosa.
SISTEMA
Finalizacin forzosa.
Alcance
Severidad de la alarma
Finalizacin forzosa.
Robot
No se detiene.
No se detiene.
Reduce la velocidad
y se detiene.
Reduce la velocidad
y se detiene.
Se detiene
nmediatamente.
Reduce la velocidad
y se detiene.
Se detiene
nmediatamente.
Se detiene
nmediatamente.
Suministor de energa
del sistema del servo
No se cierra.
No se cierra.
No se cierra.
No se cierra.
Cerrado
No se cierra.
Alcance
----------Local
Global
Local
Global
Global
Cerrado
Local
Global
Global
Cerrado
Global
Indice en el que la alarma es aplicada cuando mltiples programas se ejercen
simultneamente (funcin multitarea)
- Local La alarma es aplicada slo en el programa que ha causado la alarma.
- Global: La alarma se aplica a todos los programas.
Alarma
Se produce una alarma cuando hay un fallo durante la programacin o ejecucin del programa, o
cuando se introduce la seal de parada de emergencia u otra seal de alarma desde una unidad
perifrica. La alarma se activa para dejarle constancia al operador del fallo de manera que pueda parar
el proceso por razones de seguridad.
NOTA
Si se desencadena una alarma cuyo nmero no est descrito, contactar FANUC Robotics.
-1276-
APENDICE D
B-82284ES-3/01
Visualizacin o indicacin de los cdigos de alarma
Cuando se produce una alarma, el mensaje y las luces del LED de la alarma en la consola de
programacin se visualizan en las lneas primera y segunda de la pantalla.
El operador puede saber qu alarma se ha producido mirando los LED y el mensaje.
Cdigo de Alarma
Cdigo de detalle
(Nmero ID)
Fig. D.1 (a) Visualizacin de alarma
Severidad de la alarma
Cmo manejar el programa o el robot hasta que stos se detengan depende de la seriedad de la causa
de la alarma. A esta "seriedad" se le llama severidad de la alarma.
El grado de severidad de la alarma se indica de la manera siguiente:
Tabla D.1 (a) Severidad de Alarma
Severidad
de la alarma
Descripcin
WARN alarm
Una alarma WARN advierte al operador de un fallo comparativamente menor o sin
importancia. La alarma WARN no afecta el funcionamiento del robot. Cuando se
produce una alarma WARN, no se enciende ningn LED correspondiente en la
consola de programacin del panel del operador de la mquina. Se deberan tomar
las medidas oportunas para prevenir un posible fallo.
PAUSE alarm
Cuando se produce una alarma PAUSE, se interrumpe la ejecucin del programa y
se detiene el funcionamiento del robot una vez haya completado el proceso.
Antes de reiniciar el programa, se deben tomar medidas adecuadas frente a la alarma.
STOP alarm
Cuando se produce una alarma STOP, se interrumpe la ejecucin del programa y se
reduce la velocidad del robot hasta que se detiene. Antes de reiniciar el programa, se
deben tomar medidas adecuadas frente a la alarma.
SERVO alarm
Cuando se produce una alarma SERVO, se cierra el suministro de corriente del
sistema servo para detener la ejecucin del programa y parar el robot
inmediatamente. La alarma SERVO se activa por razones de seguridad o cuando se
produce un fallo en el funcionamiento del robot.
ABORT alarm
Cuando se produce una alarma ABORT, se finaliza obligatoriamente la ejecucin
del programa y se reduce la velocidad del robot hasta que se detiene.
SERVO 2 alarm
Cuando se produce una alarma SERVO 2, se cierra el suministro de corriente del
sistema servo para detener el programa y parar el robot inmediatamente. La alarma
SERVO se activa por razones de seguridad o cuando se produce un fallo en el
funcionamiento del robot.
SYSTEM alarm
La alarma SYSTEM se emite cuando se produce un fallo importante del sistema.
Cuando se produce la alarma SYSTEM , se desactivan todos los robots del sistema.
Tras tomar las medidas adecuadas frente a la alarma, apague el robot y vuelva a
conectar la corriente.
-1277-
APENDICE D
B-82284ES-3/01
Pantalla de alarma
En la pantalla de alarma, se visualiza la alarma actual. Al pulsar la tecla F3, se puede cambiar entre la
pantalla del informe de alarma y la pantalla de historial de alarmas. Adems, las siguientes pantallas
de alarma estn provistas para reducir la visualizacin de pantalla conforme al tipo de alarma:
Pantalla de alarma de movimiento
Visualiza alarmas relacionadas con la operacin del robot, como alarmas servo.
Pantalla de alarma del sistema
Visualiza las alarmas relacionadas con el controlador del robot, como alarmas del sistema.
Pantalla de alarma de aplicaciones
Visualiza las alarmas de aplicacinn especfica.
Pantalla de alarma de comunicaciones
Visualiza alarmas relacionadas con funciones de comunicacin.
Para visualizar la pantalla [Alarm], usar el procedimiento de abajo.
- Procedimiento
Visualizando la pantalla [Alarm]
a. Pulse [MENUS].
b. Seleccione [ALARM].
c. Para visualizar el historial de alarmas de movimiento que visualiza slo las alarmas relacionadas
con el funcionamiento, pulsar [F1([TYPE])] y seleccionar [Motion Log].
d. Para visualizar el historial de alarmas del sistema que visualiza slo las alarmas relacionadas con
el sistema, pulsar [F1([TYPE])] y seleccionar [System Log].
e. Para visualizar el historial de alarmas de aplicaciones que visualiza slo las alarmas relacionadas
con aplicaciones, pulsar [F1([TYPE])] y seleccionar [Appl Log].
f. Para visualizar el historial de alarmas de comuniccin que visualiza slo las alarmas relacionadas
con la comunicacin, pulsar [F1([TYPE])] y seleccionar [Comm Log].
-1278-
APENDICE D
B-82284ES-3/01
Pantalla de alarma activa
En la pantalla de alarma activa slo se muestran la alarmas activas. Una vez se han eliminado las
alarmas mediante la seal de entrada de borrado de alarmas, en esta pantalla se muestra el mensaje
"THERE ARE NO ACTIVE ALARMS", no hay alarmas activas.
En la pantalla se muestra la salida de la alarma tras la ltima entrada de seal de borrado de alarmas.
Cuando se pulsa la tecla de delete (+shift) en la pantalla del historial de la alarma, la alarma
correspoondiente desaparece de la pantalla de alarma activa.
En la pantalla se muestran alarmas con un grado de severidad de PAUSE o mayor. Las alarmas WARN
y NONE no se muestran. Algunas alarmas PAUSE o otras de mayor severidad puede que no se
muestren si variables del sistema como $ER_NOHIS estn configuradas a ese efecto.
Si se detectan varias alarmas, se muestran en la pantalla en el orden inverso al que se han detectado.
Se pueden mostrar hasta un total de 100 lneas.
Si la alarma tiene un cdigo de causa, ste se muestra debajo de la linea de la alarma.
Tecla MANU pulsada y 4 ALARM seleccionada.
F3 [ACTIVE] pulsada.
Tecla de alarma pulsada.
F3 [HIST] pulsada.
Visualizacin automtica cuando una alarma se activa.
Pantalla de historial de alarmas visualizada
Pantalla de alarma activa visualizada.
Fig. D.1 (b) Procedimiento para visualizar la pantalla de alarma activa y el historial de alarmas
-1279-
APENDICE D
B-82284ES-3/01
Funcin de visualizacin automtica de alarmas
Cuando se detecta una alarma que resultar en la parada del sistema (PAUSE o de ms severidad), la
funcin de visualizacin automtica de la pantalla de alarma abre automticamente la pantalla de
alarma. Con esta funcin el operador no tiene que visualizar manualmente la pantalla de alarmas y se
consigue que la causa directa del fallo del sistema sea detectada rpidamente.
NOTA
Una vez cumplidos los requisitos de visualizacin, la pantalla de alarma se visualiza
automticamente si se detecta una alarma al inicio. La visualizacin automtica de la alarma se lleva
a cabo independientemente del modo de arranque.
NOTA
Si se detecta una alarma cuando el CRT est conectado, se mostrar la pantalla d alarma en la
consola de programacin y en la CRT.
Los requisitos de visualizacin para la pantalla automtica de alarma, se describen seguidamente:
Cuando est configurada la seal de la funcin de visualizacin de la pantalla de alarma automtica
En la pantalla de configuracin del sistema, seleccionar AUTO.DISPLAY OF ALARM MENU
para activar o desactivar la funcin de visualizacin automtica. La funcin est desactivada por
defecto. Para que el cambio surta efecto, es necesario apagar el robot y volverlo a encender. Ver
Seccin 3.14.
Cuando la visualizacin automtica de la seal del men de alarma para un nivel de severidad de
alarma es configurado $ER_SEV_NOAUTO[] establece si activar o desactivar la visualizacin de
la pantalla de alarma automtica para cada nivel de severidad de alarma. Hay siete niveles de
severidad de alarma. Las alarmas NONE y WARN no afectan a la ejecucin del programa ni al
funcionamiento del robot y no producen la visualizacin automtica. La visualizacin automtica
est activada por defecto en la alarma PAUSE y las de severidad mayor. Se puede cambiar esta
configuracin en la pantalla de variables del sistema.
Variable del sistema
Nivel de severidad de alarma orrespondiente
Configuracin estndar
$ER_SEV_NOAUTO [1]
$ER_SEV_NOAUTO [2]
$ER_SEV_NOAUTO [3]
$ER_SEV_NOAUTO [4]
$ER_SEV_NOAUTO [5]
PAUSA
STOP
SERVO
ABORT
SISTEMA
TRUE
TRUE
TRUE
TRUE
TRUE
FALSE : La visualizacin automtica de la pantalla de alarma est desactivada.
TRUE: La visualizacin automtica de la pantalla de alarma est activada.
NOTA
Si se detecta una alarma PAUSE seguida de una alarma ABORT y la visualizacin automtica de
la alarma pause est desactivada, no se llevar a cabo la visualizacin automtica durante el fallo.
La visualizacin automtica de una alarma particular puede ser desactivada.
La funcin de visualizacin de la pantalla de alarma automtica puede ser desactivada para una
alarma particular. Se pueden configurar hasta diez alarmas en la pantalla de variables del sistema.
Si se detecta una alarma determinada mientras la visualizacin automtica de la pantalla de alarma
est desactivada, no se mostrar automticamente la pantalla de alarma.
-1280-
APENDICE D
B-82284ES-3/01
La configuracin de est opci se hace mediante las siguientes variables:
Variable del sistema
$ER_NOAUTO.
$NOAUTO_ENB
$ER_NOAUTO.
$NOAUTO_NUM
$ER_NAOUTO.
$NOAUTO_CODE
[1 to 10]
Descripcin
Activa o desactiva la funcin de suprimir la visualizacin automtica de la pantalla
de alarma para una alarma especfica en $ER_NOAUTO.NOAUTO_CODE[]
mientras la visualizacin automtica est activada.
- FALSE: La funcin de supresin de la visualizacin automtica de la pantalla de
alarma est desactivada.
- TRUE: La funcin de supresin de la visualizacin automtica de la pantalla de
alarma est activada.
Fija el nmero de alarmas configuradas en $ER_NOAUTO.NOAUTO_CODE[].
Nmero de Error consistiendo en alarma ID y nmero de alarma
Ejemplo11 002 (Servo 002 alarm)
Alarma ID Nmero de Alarma
Alarma ID -> Consultar apartado D.2.
Para las alarmas que se citan a continuacin, causadas por el usuario y que resultan en una parada del
sistem, el $ER_NOAUTO.$NOAUTO_ENB est en TRUE por defecto. Cuando se cambia la
configuracin a FALSE, la pantalla de alarma correspondiente se abre automticamente.
Servo 001
Servo 002
Servo 003
Servo 004
Servo 005
Servo 012
Parada de emergencia del panel del operador
Paro de emergencia de la consola de programacin
Interruptor deadman
Valla abierta
Consola de programacin desconectada
(el botn de carga/descarga de la consola de programacin est pulsado)
Reanudacin del suministro de energa
Cuando se detecta una alarma establecida en $ER_NOAUTO.$NOAUTO_CODE[] y otra en alarma
en ese orden mientras $ER_NOAUTO.$NOAUTO_ENB est en TRUE, no se realiza la visualizacin
automtica.
Cuando la salida de fallo est en marcha
Si la pantalla de alarma se muestra automticamente cada vez que se detecta un alarma PAUSE u
otra de ms severidad, se puede se que se est mostrando durante la recuperacin de la alarma o la
comprobacin de configuracin en otra pantalla. Las pantalla cambiaran de manera recular, lo cual
puede interferir en la recuperacin y otras operaciones. Para prevenir esto, la visualizacin
automtica no es realizada mientras una alarma est en activo. Si hay una alarma activa puede ser
comprobada por la salida de seal de fallo. Mientras la seal de fallo es emitida sin tener en cuenta
el arranque de servo, la visualizacin automtica no es efectuada incluso si se detecta una alarma
NOTA
Cuando se detecta una alarma de PAUSE, STOP o ABORT, la seal de error se enva con el inicio
del sistema servo. Siempre que se recibe una seal de borrado de alarma, la seal de error se
reconfigura. Si se lleva a cabo un seguimiento continuo para levantar la alarma (NO ARC
PROCESS I/O BOARD, por ejemplo), puede que se realice una visualizacin automtica de la
alarma en cada una de as reconfiguraciones.
NOTA
Cuando se detecta una alarma SERVO o SYSTEM, la seal de error se reconfigura tras inicio del
sistema servo.
-1281-
APENDICE D
B-82284ES-3/01
Funcin de vuelta automtica
Con la funcin de vuelta automtica se muestra la pantalla que se visualizaba antes de la la pantalla
automtica y se recibe una seal de borrado de alarma. Esta funcin s ejecuta conjuntamente con la
funcin de visualizacin automtica. La funcin de vuelta automtica funciona de la siguiente manera:
Cuando la funcin de visualizacin automtica de la pantalla de alarma est activada, la pantalla de
alarma se visualiza automticamente en el caso de que se levante una alarma. Cuando se ha
eliminado la alarma mediante una seal de borrado de alarma, se muestra automticamente la
pantalla anterior.
Si la pantalla de alarma no se visualiza automticamente por una alarma sino a travs del men, la
pantalla anterior no se mostrar incluso si se recibe una seal de borrado de alarma.
Si se visualiza otra pantalla antes de recibir la seal de borrado de alarma, no funcionar la funcin
de vuelta automtica.
La funcin de vuelta automtica funciona cuando la seal de salida finaliza.
Si el suministro de energa se corta o se abre despus de que la funcin de visualizacin automtica
muestre la pantalla de alarma, la funcin de vuelta automtica no funcionar tras el inicio. Esto es
independiente del modo de arranque (en fro, en caliente, etc.)
Procedimiento D-1
Visualizacin del informe de alarma/ historia de alarma/ informacin de detalles
de alarma
Paso
1. Pulse la tecla MENUS para visualizar el men de pantallas.
2. Seleccione "4 ALARM". La pantalla de incidencia de alarma se visualiza.
Si una alarma es detectada, la pantalla de la alarma activa se visualiza automticamente.
3. Para visualizar la pantalla de historial de alarma, pulse F3, [HIST].
Cuando pulse F3 [ACTIVE], se mostrar de nuevo la pantalla de alarma activa.
-1282-
APENDICE D
B-82284ES-3/01
NOTA
Se asigna el nmero 1 a la ltima alarma. Para ver los mensajes que no estn actualmente en
pantalla, pulse F5, HELP, despus pulse la tecla de flecha hacia la derecha.
4. Para visualizar la pantalla de informacin detallada de la alarma, pulse F5 "HELP".
5. Para volver a la pantalla de historial de alarmas, pulse la tecla PREV.
6. Para borrar todos los historiales de alarmas, pulse y mantenga pulsada la tecla SHIFT y pulse F4
"CLEAR".
NOTA
Cuando la variable del sistema $ER_NOHIS = 1, las alarmas NONE y WARN no se registran.
Cuando $ER_NOHIS=2, los reinicios no se registran en el historial de alarmas. Cuando
$ER_NOHIS=3, no se registran los reinicios ni las alarmas WARN y NONE.
-1283-
APENDICE D
B-82284ES-3/01
Procedimiento D-2 Parada causada por una alarma grave o una recuperacin
Parada caisada por una alarma grave
Paso
1. Cuando una alarma es emitida, el programa en curso es detenido, y se visualiza PAUSED o END
en la pantalla de la consola de programacin.
Tambin se visualiza un mensaje de alarma en la pantalla de la consola de programacin y se
enciende la luz de ALARM.
- Recuperacin de una alarma de interruptor deadman (SERVO-003)
Paso
1. Pulse y mantenga pulsada el interruptor deadman y a continuacin pulse la tecla RESET.
- Supresin de una alarma de sobredesplazamiento (SERVO 005)
Paso
1. Pulse la tecla MENUS para visualizar el men de pantallas.
2. Pulse 0 NEXT PAGE y seleccione 6 SYSTEM de la siguiente pgina.
Pulse F1 [TYPE] y seleccione OT RELEASE. Se visualizar la pantalla de liberacin de OT
3. Pulse F2 [RELEASE] para liberar el eje de sobredesplazamiento.
-1284-
APENDICE D
B-82284ES-3/01
4. Pulse el botn de borrado de alarma mientras mantiene pulsada la tecla shift.
5. Minetras mantiene pulsada la tecla shift, pulse la tecla de movimiento para desplazar la boquilla por
el eje de sobredesplazamiento hasta la parte movible.
- Recuperacin de una alarma de mueca (SERVO-006)
Paso
1. Pulse y mantenga pulsada la tecla SHIFT y a continuacin pulse la tecla RESET.
2. Mantega pulsada la tecla SHIFT y pulse la tecla de movimiento apropiada para situar el robot en
una posicin en la que se pueda reparar.
- Recuperacin de una alarma de desajuste de impulso, alarma BZAL y alarma RCAL
(SRVO-038, 062, 063)
Paso
1. Pulse la tecla MENUS para visualizar el men de pantallas.
2. Pulse 0 -- NEXT --" y seleccione "6 SYSTEM" de la siguiente pgina.
Pulse F1 "[TYPE]" y seleccione "Variables". Se visualiza la pantalla de variables del sistema.
3. Establezcat TRUE en $MCR.$SPC_RESET.
( Esta variable de sistema vuelve automticamente a FALSE en unos minutos.)
4. Pulse RESET para liberar la alarma.
NOTA
Los datos de masterizacin se pueden corregir incluso si se detecta una alarma de desajuste de
recuento. Si los datos de masterizacin son correctos, no es necesario llevar a cabo una
masterizacin. Simplemente fije el $DMR_GRP.$MASTER_DONE en TRUE y seleccion
MASTER/CAL en la pantalla de posicin.
-1285-
APENDICE D
B-82284ES-3/01
- Recuperacin de otras alarmas
Paso
1. Eliminar la causa de una alarma. Por ejemplo, corrija el programa.
2. Pulse la tecla RESET para reiniciar el programa. Seguidamente, el mensaje de alarma desaparece
de la pantalla de la consola de programacin. El LED de la alarma se apaga.
-1286-
APENDICE D
B-82284ES-3/01
D.2 CODIGO DE ALARMAS
D.2.1 Cdigos de error SRVO (ID=11)
SRVO-001 SERVO Operator panel E-stop
(Causa)
El botn de paro de emergencia del panel del operador est pulsado.
(Solucin) Gire el botn de paro de emergencia del panel del operador en el sentido de las agujas
del reloj para liberarlo y pulse RESET.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-002 SERVO Teach pendant E-stop
(Causa)
El botn de paro de emergencia de la consola de programacin estaba activado.
(Solucin) Libere el botn de paro de emergencia de la consola de programacin.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-003 SERVO Deadman switch released
(Causa)
El interruptor deadman no estaba pulsado cuando la consola de programacin estaba
activada.
(Solucin) Pulse el interruptor deadman para activar el funcionamiento del robot.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-004 SERVO Fence open
(Causa)
En el bloque terminal de la tarjeta de circuito impresa del panel del operador no hay
ninguna conexin entre las seales FENCE1 y FENCE2. (o EAS1 y EAS11, EAS2 y
EAS21). Cuando hay una verja de seguridad conectada, est abierta.
(Solucin) Establezca una conexin entre FENCE1 y FENCE2; a continuacin, pulse la tecla de
reinicio.
Cuando no est conectado un valla de seguridad, se pone la terminal entre FENCE1 y
FENCE2.
Cuando una valla de seguridad est conectado, cerrar la puerta antes de comenzar el
trabajo.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-005 SERVO Robot overtravel
(Causa)
Se ha encallado un interruptor de lmite de hardware en un eje. Normalmente, se evita
que el movimiento del robot supere un lmite ms all del rango de movimiento mximo
(lmites de software) para cada eje. Sin embargo, cuando se transporta el robot, el estado
de sobredesplazamiento est configurado para el traslado.
(Solucin 1) Manteniendo pulsada la techa shift, pulse el botn de liberacin de alarma para liberarla.
(Solucin 2) Mueva el eje de sobredesplazamiento dentro del rango mvil manteniendo pulsada la
tecla shift y realizando el movimiento por eje.
(Solucin 3) Comprobar el fusible (FS2) en el amplificador de 6 canales. Sustityalo si se ha fundido.
(Solucin 4) Para ms informacin, consulte el manual de mantenimiento.
-1287-
APENDICE D
B-82284ES-3/01
SRVO-006 SERVO Hand broken
(Causa)
Se ha roto una pinza de seguridad. Si no se encuentra ninguna pinza rota, la causa ms
probable es que la seal HBK de un cable de conexin del robot est a 0 V.
(Solucin 1) Manteniendo pulsada la techa shift, pulse el botn de liberacin de alarma para
desactivarla.
(Solucin 2) Mientras mantiene presionada la tecla shift, posicionar la herramienta en el lugar de
trabajo mediante "jog feed".
a Reemplazar la mano de seguridad.
b Comprobar el cable.
(Solucin 3) Comprobar el fusible (FS2) en el amplificador de 6 canales. Sustityalo si se ha fundido.
(Solucin 4) Si la seal manual se seguridad no es usada, desactivar esta seal en la pantalla de
configuracin del sistema.
(Solucin 5) Para ms informacin, consulte el manual de mantenimiento.
SRVO-007 SERVO External emergency stops
(Causa)
El botn de paro de emergencia externo est pulsado.
En el bloque terminal de la tarjeta de circuito impreso del panel del operador, no se ha
establecido conexin entre EMGIN1 y EMGIN2 (o EES1 y EES11, EES2 y EES21).
(Solucin 1) Si se utiliza el paro de emergencia externo, elimine el origen del fallo y pulse RESET.
(Solucin 2) Si no se utiliza el paro de emergencia externo, compruebe el cableado en EMGIN1 y
EMGIN2.
(Solucin 3) Para ms informacin, consulte el manual de mantenimiento.
SRVO-009 SERVO Pneumatic pressure alarm
(Causa)
La alarma de presin neumtica indica la presencia de un defecto. Si no se detecta la
alarma de presin neumtica, la causa ms probable es que la seal PPABN de un cable
de conexin del robot est a 0 V.
(Solucin) Si no se detecta la alarma de presin neumtica, comprobar el cable.
Consultar el manual de mantenimiento para ms detalle.
SRVO-010 SERVO Belt broken
(Causa)
La entrada digital de cinta rota del robot (RDI7) est activada.
(Solucin 1) Si se observa que la cinta tiene algn tipo de defecto, reprela y pulse la tecla de reinicio.
(Solucin 2) Si la cinta se encuentra en buenas condiciones, puede que la seal RDI [7] del cable de
conexin del robot no sea correcta. Compruebe el cable.
(Solucin 3) Compruebe la variable del sistema $PARAM_GROUP.$BELT_ENABLE.
SRVO-011 SERVO TP released while enabled
(Causa)
El interruptor de sujecin de la consola de programacin del panel del operador se ha
puesto en funcionamiento mientras la consola de programacin estaba activada.
(Solucin) Vuelva a conectar el cable de la consola de programacin para continuar trabajando.
SRVO-012 SERVO Power failure recovery
(Causa)
Conexin de potencia normal (arranque en caliente).
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
-1288-
APENDICE D
B-82284ES-3/01
SRVO-014 SERVO Motor del ventilador anormal (%d)
(Causa)
Un motor del ventilador de la unidad de control no funciona correctamente.
El nmero en el soporte indica qu ventilador es anormal.
(1) : ventilador encima de la ranura 1 (2) : ventilador encima de la ranura 2 (3) : ambos
ventiladores
(Solucin) Compruebe los motores del ventilador y sus cables de conexin. Sustituya cualquier
motor y/o cable defectuoso.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-015 SERVO System over heat
(Causa)
La temperatura de la unidad de control supera el valor indicado.
(Solucin 1) Si la temperatura ambiental es superior a la indicada (45C), utilice la ventilacin para
reducirla hasta el valor indicado.
(Solucin 2) Compruebe que los ventiladores funcionan con normalidad.
De lo contrario, compruebe los motores del ventilador y sus cables de conexin.
Sustituya cualquier motor y/o cable defectuoso.
(Solucin 3) Para ms informacin, consulte el manual de mantenimiento.
SRVO-018 SERVO Brake abnormal
(Causa)
La corriente para el freno supera la indicada.
(Solucin 1) Comprobar el cable del freno (cable de conexin del robot y cable interno del robot).
(Solucin 2) Confirmar que el conector del cable del freno est conectado.
(Solucin 3) Sustituya el amplificador.
SRVO-021 SERVO SRDY off (Group:%d Axis:%d)
(Causa)
Si HRDY est activada, SRDY est desactivada aunque no haya ninguna otra alarma
activa.
(HRDY es la seal enviada desde el servidor al servosistema para especificar cundo se
debe activar o desactivar el MCC del servoamplificador. SRDY es la seal enviada
desde el servosistema al servidor para indicar si el MCC del servoamplificador est
activado o desactivado. Normalmente, si un MCC del servoamplificador no se ha
activado a pesar de que haya recibido la seal de activacin, se emite una alarma para
el servoamplificador. El servidor no emite dicha alarma (SRDY desactivada) si se
detecta una alarma para el servoamplificador. Por lo tanto, cuando no se detecta ningn
error, la alarma indica que el MCC no se ha activado.)
(Solucin 1) Compruebe si la puerta est abierta. Compruebe tambin el interruptor de la puerta.
(Solucin 2) Comprobra el voltaje VAC de 200 aplicado al servoamplificador.
Si la tensin es de 170 VAC o inferior, compruebe la tensin de entrada de la fuente de
alimentacin.
(Solucin 3) Sustituya la unidad de control de paro de emergencia.
(Solucin 4) Sustituya la tarjeta de circuito impresa de la CPU principal.
(Solucin 5) Para ms informacin, consulte el manual de mantenimiento.
-1289-
APENDICE D
B-82284ES-3/01
SRVO-022 SERVO SRDY on (Group:%d Axis:%d)
(Causa)
SRDY ya estaba activada cuando se intent activar el MCC mediante HRDY.
(HRDY es la seal enviada desde el servidor al servosistema para especificar cundo se
debe activar o desactivar el MCC del servoamplificador. SRDY es la seal enviada
desde el servosistema al servidor para indicar si un MCC del servoamplificador est
activado o desactivado.)
(Solucin 1) Sustituya la unidad de control de paro de emergencia.
(Solucin 2) Sustituya la tarjeta de circuito impresa de la CPU principal.
(Solucin 3) Sustituya el servoamplificador.
SRVO-023 SERVO Stop error excess (G:%d A:%d)
(Causa)
Se ha producido un error de posicin excesiva del servo cuando se ha parado el motor.
(Solucin 1) Compruebe si la carga aplicada supera el rango. Si es as, redzcala. (Si se aplica una
carga excesiva, el par de torsin necesario para la aceleracin, desaceleracin, etc.
supera el par de torsin mximo disponible del motor. Por lo tanto, podra no poder
responder correctamente a un comando emitido, lo que producira la emisin de esta
alarma.)
(Solucin 2) Compruebe la tensin de cada interfaz de la tensin de tres fases (200 VAC) aplicada al
servoamplificador. Si la tensin es de 170 VAC o inferior, compruebe la tensin de
entrada de la fuente de alimentacin. (La aplicacin de una tensin subestndar a un
servoamplificador provoca un par de torsin inferior al normal. Por lo tanto, podra no
poder responder correctamente a un comando emitido, lo que producira la emisin de
esta alarma.)
(Solucin 3) Si sucede una alarma en el eje auxiliar, comprobar la configuracin del nmero de freno.
(Solucin 4) Si la tensin de entrada de la fuente de alimentacin es de 170 VAC o superior, sustituya
el servoamplificador.
(Solucin 5) Reemplace el motor.
SRVO-024 SERVO Move error excess (G:%d A:%d)
(Causa)
Cuando el robot se mueve, el error de posicin del servo supera un valor especificado
previamente ($PARAM_GROU.$MOVER_OFFST o
$PARAM_GROUP.$TRKERRLIM). Por ejemplo, este error se producir si la tasa de
alimentacin del robot es diferente a la especificada.
(Solucin) Realice la misma accin descrita para el elemento anterior.
SRVO-025 SERVO Motn dt overflow (G:%d A:%d)
(Causa)
El valor indicado con un comando es demasiado largo.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
SRVO-026 WARN Motor speed limit (G:%d A:%d)
(Causa)
Se ha intentado superar la velocidad mxima establecida del motor
($PARAM_GROUP.$MOT_SPD_LIM).
La velocidad del motor se bloquea en el valor mximo establecido.
(Solucin) Es slo informacin. Sin embargo, debe intentar eliminar este error y no repetir las
circunstancias que lo han originado.
-1290-
APENDICE D
B-82284ES-3/01
SRVO-027 WARN Robot not mastered(Group:%d)
(Causa)
Se ha intentado realizar un calibrado, pero todava no se haba completado la
masterizacin.
(Solucin) Realice la masterizacin desde la pantalla de calibrado [6 SYSTEM CALIBRATION].
SRVO-030 SERVO Brake on hold (Group:%d)
(Causa)
Cuando la funcin de alarma de paro temporal ($SCR.$BRKHOLD_ENB=1) est
activada, esta alarma se origina siempre que se realiza un paro temporal.
Cuando est funcin no sea necesaria, desactvela.
(Solucin) Desactive[Brake on hold] en la pantalla de configuracin de elementos generales
[6 GENERAL SETTING ITEMS]. Se necesita un reinicio cuando se cambia esta
configuracin.
SRVO-031 SERVO User servo alarm (Group:%d)
(Causa)
Se ha emitido una una alarma del servo del usuario.
Esta alarma ha sido activada cuando la variable de sistema $MCR_GRP[i].
$SOFT_ALARM est configurada como TRUE.
Sin embargo, slo los usuarios de KAREL pueden usar esta variable.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
SRVO-033 WARN Robot not calibrated(Group:%d)
(Causa)
Se ha intentado establecer un punto de referencia para una masterizacin simple, pero
todava no se ha completado el calibrado.
(Solucin) Ejecute el calibrado mediante el siguiente procedimiento.
1. Conectar la tensin de alimentacin.
2. Ejecute [CALIBRATION] en la pantalla de calibracin
[6 SYSTEM CALIBRATION].
SRVO-034 WARN Ref pos not set (Group:%d)
(Causa)
Se ha intentado realizar una masterizacin simple, pero todava no se ha establecido un
punto de referencia necesario.
(Solucin) Establezca un punto de referencia para la masterizacin simple desde la pantalla de
calibrado.
SRVO-035 WARN Joint speed limit (G:%d A:%d)
(Causa)
Se ha intentado superar la velocidad articular mxima ($PARAM_GROUP.
$JNTVELLIM). La velocidad articular se bloquea en el valor mximo establecido.
(Solucin) Debera hacerse todos los intentos para eliminar este error.
SRVO-036 SERVO Inpos time over (G:%d A:%d)
(Causa)
El tiempo de seguimiento en posicin ($PARAM_GROUP.$INPOS_TIME) se ha
agotado, pero el estado en posicin ($PARAM_GROUP.$STOPTOL) todava no se ha
establecido.
(Solucin) Realice la misma accin que la especificada para Servo - 023 (exceso de error de paro).
SRVO-037 SERVO IMSTP input (Group:%d)
(Causa)
Se aplica la seal *IMSTP, que es una seal de E/S del dispositivo perifrico.
(Solucin) Conecte la seal *IMSTP.
-1291-
APENDICE D
B-82284ES-3/01
SRVO-038 SERVO2 Pulse mismatch (G:%d A:%d)
(Causa)
Al desconectar se detecta un contaje de impulsos diferente del que se detecta al
conectar.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
SRVO-041 SERVO2 MOFAL alarm (Grp:%d Ax:%d)
(Causa)
Un valor especificado con un comando es demasiado largo.
(Solucin) Tome nota de las causas que provocaron el error y pngase en contacto con el servicio
de asistencia tcnica de su zona.
SRVO-043 SERVO DCAL alarm(Group:%d Axis:%d)
(Causa)
La energa producida por la descarga de regeneracin es excesiva.
Como resultado, no se puede disipar como calor toda la energa generada.
(Cuando se pone en funcionamiento un robot, un servoamplificador le proporciona
energa. Sin embargo, a lo largo de su eje vertical, el robot se mueve hacia abajo
mediante energa potencial. Si la disminucin de la energa potencial supera la energa
de aceleracin, el servoamplificador recibe energa del motor. Lo mismo sucede durante
la desaceleracin, aunque la fuerza de la gravedad no tenga ningn efecto. Esta energa
se denomina energa de regeneracin. Normalmente, el servoamplificador disipa esta
energa de regeneracin convirtindola en calor. Cuando la cantidad de energa de
regeneracin supera la cantidad que se puede disipar como calor, se acumula un exceso
de energa en el servoamplificador, que activa esta alarma.)
(Solucin 1) Cuando el indicador LED del servoamplificador PSM muestra "8" (alarma DCOH)
(La alarma DCOH se origina cuando el termostato detecta un recalentamiento de la
resistencia de regeneracin.):
(Solucin 2) (a) Esta alarma se puede activar cuando se realiza con frecuencia la aceleracin/
desaceleracin o cuando se genera una gran cantidad de energa de regeneracin en el
eje vertical. En estos casos, se debe utilizar el robot en condiciones menos exigentes.
(Solucin 3) Comprobar el fusible (FS3) en el amplificador de 6 canales.
Si el fusible est fundido, debe sustituirse.
(Solucin 4) Cambie la resistencia de regeneracin.
(Solucin 5) Compruebe el cable situado entre el servoamplificador y la resistencia de regeneracin.
Sustityalo si es necesario.
(Solucin 6) Sustituya el servoamplificador.
(Solucin 7) Para ms informacin, consulte el manual de mantenimiento.
-1292-
APENDICE D
B-82284ES-3/01
SRVO-044 SERVO HVAL alarm(Group:%d Axis:%d)
(Causa)
El voltaje de CC (voltaje de vnculo CC) de la alimentacin del circuito principal es
anormalmente alto. El indicador LED del servoamplificador PSM muestra "7".
(Solucin 1) Verifique el voltaje de entrada trifsico aplicado al servoamplificador. Si la tensin es
de 253 VAC o superior, compruebe la tensin de entrada de la fuente de alimentacin.
(Si el motor se acelera o desacelera de repente cuando la tensin de entrada trifsica
supera 253 VAC, puede mostrarse esta alarma.)
(Solucin 2) Compruebe si la carga aplicada se encuentra dentro del valor establecido. Si se supera
dicho valor, reduzca la carga aplicada. (Si una carga supera el valor establecido, la
energa de regeneracin acumulada puede provocar que se active esta alarma incluso si
la tensin de entrada trifsica cumple las indicaciones.)
(Solucin 3) Comprobar el conector CRR63A o CRR63B en el amplificador de 6 canales.
(Solucin 4) Sustituya el servoamplificador.
(Solucin 5) Para ms informacin, consulte el manual de mantenimiento.
SRVO-045 SERVO HCAL alarm(Group:%d Axis:%d)
(Causa)
Ha circulado corriente demasiado alta a travs del circuito principal del
servoamplificador. El indicador LED del servoamplificador PSM muestra "-".
Uno de los LED rojos (HC1 a HC6) por encima del LED del segmento 7 permanece
encendido e indica el eje en el que se ha detectado la alarma HCAL.
(Solucin 1) Apagar el controlador del robot.
Desconecte la lnea de potencia del motor desde el bloque terminal del
servoamplificador y a continuacin conecte la potencia. Si todava se muestra est
alarma, reemplace el amplificador.
Cuando desconecte la lnea de potencia, desconecte la lnea del freno tambin para
evitar la cada del eje.
(Solucin 2) Apagar el controlador del robot.
Desconecte la lnea de potencia del motor del bloque terminal del servoamplificador, y
luego compruebe el aislamiento entre U, V y W de la lnea de potencia del motor y
GND. Si se encuentra un cortocircuito, compruebe el motor, el cable de conexin del
robot o el cable interno del robot. Si detecta algo anormal, sustituya el hardware
defectuoso.
(Solucin 3) Apagar el controlador del robot.
Retire la lnea de potencia del motor del bloque terminal del servoamplificador y, a
continuacin, compruebe la resistencia entre U y V, V y W, y W y U de la lnea de
potencia del motor mediante un instrumento de medicin capaz de detectar resistencias
muy bajas. Si las resistencias medidas difieren unas de otras, compruebe el motor, el
cable de conexin del robot o el cable interno del robot. Si detecta algo anormal,
sustituya el hardware defectuoso.
(Solucin 4) Sustituya la tarjeta de circuito impresa de la CPU principal.
-1293-
APENDICE D
B-82284ES-3/01
SRVO-046 SERVO2 OVC alarm (Group:%d Axis:%d)
(Causa)
Esta alarma se origina para proteger el motor si existe un peligro de destruccin trmica
cuando el valor actual de la raz cuadrtica media, calculada internamente por el
servosistema, supera el valor mximo permitido.
(Solucin 1) Compruebe las condiciones de funcionamiento del robot. Si se superan las
especificaciones del robot, como el ciclo de servicio y la carga, modifique el uso del
robot para que no se sobrepasen los valores especificados.
(Solucin 2) Compruebe la tensin de cada interfaz de la tensin de tres fases (200 VAC) aplicada al
servoamplificador. Si la tensin aplicada es de 170 VAC o inferior, compruebe la
tensin de entrada de la fuente de alimentacin.
(Solucin 3) Comprobar si el freno est liberado para este eje.
(Solucin 4) Sustituya la tarjeta de circuito impresa de la CPU principal.
(Solucin 5) Sustituya el servoamplificador.
(Solucin 6) Reemplace el motor.
SRVO-047 SERVO Alarma LVAL (Grupo:%d Eje:%d)
(Causa)
Aunque el contactor magntico externo para un servoamplificador est conectado, la
tensin DC (tensin de enlace DC) de la unidad de alimentacin del circuito principal o
la tensin de la unidad de alimentacin de control (+5 V) es demasiado baja.
(Solucin 1) Cuando el indicador LED del servoamplificador muestra "6"
(Esta alarma se origina cuando la tensin de la unidad de alimentacin de control (+5V)
es demasiado baja.):
a) Compruebe cada tensin de interfaz de la tensin de tres fases (200 VAC) aplicada
al servoamplificador. Si la tensin aplicada es de 170 VAC o inferior, compruebe la
tensin de entrada de la fuente de alimentacin.
b)Sustituya el servoamplificador.
(Solucin 2) Cuando el indicador LED del servoamplificador muestra "4" (Esta alarma se origina
cuando la tensin DC (tensin de enlace DC) de la unidad de alimentacin del circuito
principal es demasiado baja.):
a) Compruebe cada tensin de interfaz de la tensin de tres fases (200 VAC) aplicada
al servoamplificador. Si la tensin aplicada es de 170 VAC o inferior, compruebe la
tensin de entrada de la fuente de alimentacin. Compruebe el interrumptor del circuido
del servoamplificador.
Cierre el interruptor del circuito si est desconectado.
b)Sustituya el servoamplificador.
SRVO-049 SERVO OHAL1 alarm (Grp:%d Ax:%d)
(Causa)
Se ha accionado un termostato integrado del servoamplificador.
El indicador LED en el servoamplificador PSM muestra "3".
(Solucin 1) Compruebe las condiciones de funcionamiento del robot.
Si se supera cualquier especificacin del robot, como el ciclo de servicio y la carga,
modifique el uso del robot para que no se sobrepasen dichos valores.
(Solucin 2) Compruebe si el fusible (F1) del servoamplificador se ha fundido.
(Solucin 3) Compruebe el cable situado entre el servoamplificador (CN8B) y el transformador.
Sustityalo si es necesario.
(Solucin 4) Compruebe el cable (CN4) del servoamplificador. Sustityalo si es necesario.
(Solucin 5) Sustituya el servoamplificador.
-1294-
APENDICE D
B-82284ES-3/01
SRVO-050 SERVO Collision Detect alarm (G:%d A:%d)
(Causa)
El software del servo ha estimado un par de alteracin es demasiado largo.
(Se ha detectado una colisin.)
(Solucin 1) Compruebe si el robot ha colisionado con un objeto. Si es as, reinicie el sistema y, a
continuacin, aparte el robot del lugar de colisin mediante una operacin de
movimiento.
(Solucin 2) Compruebe que la carga aplicada no supera el rango mximo. Si se supera dicho valor,
reduzca la carga aplicada. (Si el robot se utiliza con una carga aplicada excesiva, es
posible que la alteracin estimada sea demasiado alta y se origine esta alarma.)
(Solucin 3) Compruebe si se ha configurado correctamente la informacin de carga til en la
pantalla de realizacin de movimiento.
(Solucin 4) Si esta alarma se origina cuando se usa el robot despus de un largo intervalo de tiempo
o cuando la temperatura es muy baja, haga funcionar el robot a una velocidad muy baja
durante un espacio de tiempo antes de utilizarlo a la velocidad normal.
(Solucin 5) Compruebe que no se hayan aflojado los conectores de la lnea de potencia y de freno.
Si existe algn fallo con el conector, como por ejemplo la curvatura terminal, la marca
de seccin, etc., sustityalo.
(Solucin 6) Compruebe la tensin de cada interfaz de la tensin de tres fases (200 VAC) aplicada al
servoamplificador. Si la tensin aplicada es de 170 VAC o inferior, compruebe la
tensin de entrada de la fuente de alimentacin.
(Solucin 7) Es posible que exista algn fallo en las siguientes piezas. Sustityalo o pngase en
contacto con la oficina de servicio tcnico de FANUC.
Servoamplificador
Servomotor
Cable de la unidad mecnica (unidad de potencia/freno)
Cable de conexin del robot (lnea de potencia/freno)
Unidad de freno del eje auxiliar (si esta alarma se produce con el eje auxiliar)
SRVO-051 SERVO2 CUER alarm(Group:%d Axis:%d)
(Causa)
El exceso del valor de realimentacin actual es demasiado alto.
(Solucin 1) Sustituya la tarjeta de circuito impresa de la CPU principal.
(Solucin 2) Sustituya el servoamplificador.
-1295-
APENDICE D
B-82284ES-3/01
SRVO-053 WARN Disturbance excess(G:%d A:%d)
(Causa)
La alteracin estimada en el software supera el valor lmite.
Es posible que la carga retenida en la mueca supere las especificaciones del robot.
Si se permite continuar trabajando, puede originarse un error de deteccin.
(Solucin 1) Compruebe si el robot ha colisionado con un objeto.
Si es as, reinicie el sistema y, a continuacin, aparte el robot del lugar de colisin
mediante una operacin de movimiento.
(Solucin 2) Compruebe que la carga aplicada no supera el rango mximo. Si se supera dicho valor,
reduzca la carga aplicada. (Si el robot se utiliza con una carga aplicada excesiva, es
posible que la alteracin estimada sea demasiado alta y se origine esta alarma.)
(Solucin 3) Compruebe si se ha configurado correctamente la informacin de carga til en la
pantalla de realizacin de movimiento.
(Solucin 4) Si esta alarma se origina cuando se usa el robot despus de un largo intervalo de tiempo
o cuando la temperatura es muy baja, haga funcionar el robot a una velocidad baja
durante un espacio de tiempo antes de utilizarlo a la velocidad normal.
(Solucin 5) Compruebe que no se hayan aflojado los conectores de la lnea de potencia y de freno.
Si existe algn fallo con el conector, como por ejemplo la curvatura terminal, la marca
de seccin, etc., sustityalo.
(Solucin 6) Compruebe la tensin de cada interfaz de la tensin de tres fases (200 VAC) aplicada al
servoamplificador. Si la tensin aplicada es de 170 VAC o inferior, compruebe la
tensin de entrada de la fuente de alimentacin.
SRVO-055 SERVO2 FSSB com error 1 (G:%d A:%d)
(Causa)
Ha sucedido el error de comunicacin FSSB de la tarjeta de control del eje al
amplificador.
(Solucin) Compruebe la conexin del hardware FSSB.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-056 SERVO2 FSSB com error 2 (G:%d A:%d)
(Causa)
Ha sucedido el error de comunicacin FSSB del amplificador a la tarjeta de control del
eje.
(Solucin) Compruebe la conexin del hardware FSSB.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-057 SERVO2 FSSB disconnect (G:%d A:%d)
(Causa)
El FSSB para comunicacin entre el amplificador y la tarjeta de control del eje est
desconectado.
(Solucin) Compruebe la conexin del hardware FSSB.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-058 SYSTEM FSSB %d init error (%d)
(Causa)
Se ha producido un error de comunicacin de FSSB durante la inicializacin
(Solucin) Compruebe la conexin del hardware FSSB.
Para ms informacin, consulte el manual de mantenimiento.
-1296-
APENDICE D
B-82284ES-3/01
SRVO-059 SYSTEM Servo amp init error
(Causa)
Se ha producido un error en la inicializacin del servoamplificador.
(Solucin) 1 Comprobar el servoamplificador y su cableado.
2 Sustituir el amplificador de 6 canales.
3 Contactar nuestro centro de servicio a disposicin en su localidad.
SRVO-062 SERVO2 BZAL alarm(Group:%d Axis:%d)
(Causa)
Esta alarma se origina cuando no est conectada la batera para realizar copias de
seguridad de los datos de posicin absoluta del encoder. Puede que se haya
desconectado el cable de la batera del interior del robot.
(Solucin) Corrija el motivo de la alarma y, a continuacin, vuelva a conectar la potencia tras
configurar la variable del sistema ($MCR.$SPC_RESET) como true. Es necesario
masterizar.
SRVO-064 SERVO2 PHAL alarm(Group:%d Axis:%d)
(Causa)
Esta alarma se origina cuando la fase de una seal de impulso generada mediante el
encoder es anormal.
(Solucin) Sustituya el encoder. Despus de la sustitucin, realice una masterizacin.
NOTA
Si se origina la alarma DTERR, CRCERR, o STBERR, puede que esta alarma tambin se muestre
al mismo tiempo. Sin embargo, en este caso puede ignorar con seguridad dicha alarma.
SRVO-065 WARN BLAL alarm(Group:%d Axis:%d)
(Causa)
La tensin de la batera para el encoder ha disminuido por debajo del mnimo permitido.
(Solucin) Sustituya la batera. (Cuando se muestre esta alarma, sustituya immediatamente la
batera mientras la potencia del sistema est conectada. Si la alarma BZAL se origina
porque la batera no se ha sustituido a tiempo, los datos de posicin se perdern y deber
masterizar el robot.)
SRVO-067 SERVO2 OHAL2 alarm (Grp:%d Ax:%d)
(Causa)
La temperatura del interior del encoder se ha vuelto demasiado alta y ha provocado que
el termostato integrado se active.
(Solucin 1) Compruebe las condiciones de funcionamiento del robot. Si se supera cualquier
especificacin del robot, como el ciclo de servicio y la carga, modifique el uso del robot
para que no se sobrepasen dichos valores.
(Solucin 2) Si se produce esta alarma, incluso si la potencia est conectada y el motor no se ha
recalentado, sustituya el motor.
-1297-
APENDICE D
B-82284ES-3/01
SRVO-068 SERVO2 DTERR alarm (Grp:%d Ax:%d)
(Causa)
Se ha enviado una seal de peticin al encoder de serie, pero no se han devuelto datos
de serie.
La desconexin del Hardware de la seal del encoder es detectada.
(Solucin 1) Comprobar la conexin del cable de conexin del robot (ambos lados del
servoamplificador y lado del motor).
(Solucin 2) Compruebe que las protecciones del cable de conexin del robot (para la seal del
encoder) estn bien conectados a la placa de tierra.
(Solucin 3) Sustituya el encoder.
(Solucin 4) Sustituya el servoamplificador.
(Solucin 5) Sustituya el cable de conexin del robot (para la seal del encoder).
(Solucin 6) Sustituya el cable del encoder de este eje.
SRVO-069 SERVO2 CRCERR alarm (Grp:%d Ax:%d)
(Causa) Los datos de serie han cambiado durante la transmisin.
(Solucin) Consulte SRVO-068.
SRVO-070 SERVO2 STBERR alarm (Grp:%d Ax:%d)
(Causa)
Se ha producido un error en el bit de arranque o paro de los datos de serie.
(Solucin) Consulte SRVO-068.
SRVO-071 SERVO2 SPHAL alarm (Grp:%d Ax:%d)
(Causa)
La velocidad de feedback es anormalmente alta (3750 rpm o ms).
(Solucin 1) Esta alarma no indica la causa principal del problema si se muestra junto con la alarma
PHAL (alarma N 064).
(Solucin 2) Consulte SRVO-068.
SRVO-072 SERVO2 PMAL alarm(Group:%d Axis:%d)
(Causa)
Puede que el encoder sea defectuoso.
(Solucin) Sustituya el encoder y, a continuacin, realice una masterizacin.
SRVO-073 SERVO2 CMAL alarm(Group:%d Axis:%d)
(Causa)
Puede que el encoder est defectuoso, o que el ruido provoque que no funcione
correctamente.
(Solucin 1) Realice una masterizacin simple y mejore la proteccin.
(Solucin 2) Sustituya el encoder.
SRVO-074 SERVO2 LDAL alarm(Group:%d Axis:%d)
(Causa)
El LED del encoder se ha desconectado.
(Solucin) Sustituya el encoder y, a continuacin, realice una masterizacin.
SRVO-075 WARN Pulso no establecido (G:%d A:%d)
(Causa)
Todava no se ha establecido la posicin absoluta del encoder.
(Solucin) Mueva el robot a lo largo de cada eje donde se ha producido la alarma, hasta que sta
no se vuelva a mostrar al eliminarla .
-1298-
APENDICE D
B-82284ES-3/01
SRVO-076 Tip Stick Detection (G:%d A:%d)
(Causa)
El software del servo ha detectado un par de alteracin excesivo al inicio de la
operacin.
(Solucin) Pulse la tecla de reinicio de la consola de programacin para reiniciar y separar el robot
de todos los obstculos movindolo. Consulte SRVO-050.
SRVO-081 WARN EROFL alarm (Track enc:%d)
(Causa)
El contaje de impulsos del movimiento de lnea est sobrecargado.
(Solucin 1) Comprobar que la condicin para el movimiento de lneas no excede la restriccin del
movimiento de lneas.
(Solucin 2) Sustituya el encoder.
(Solucin 3) Sustituir la tarjeta de movimiento de lneas.
(Solucin 4) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
SRVO-082 WARN DAL alarm(Track enc:%d)
(Causa)
El encoder del movimiento de lnea est desconectado.
(Solucin 1) Compruebe el cable del encoder.
(Solucin 2) Compruebe que las protecciones del cable del encoder estn bien conectadas a la placa
de tierra.
(Solucin 3) Sustituir el cable del movimiento de lneas.
(Solucin 4) Sustituya el encoder.
(Solucin 5) Sustituir la tarjeta de movimiento de lneas.
SRVO-084 WARN BZAL alarm (Track enc:%d)
(Causa)
Esta alarma se origina cuando no est conectada la batera para realizar copias de
seguridad de los datos de posicin absoluta para el encoder.
(Solucin) Consulte la descripcin de Servo - 062 BZAL alarm.
SRVO-086 WARN PHAL alarm (Track enc:%d)
(Causa)
Esta alarma se origina cuando la fase de una seal de impulso generada mediante el
encoder es anormal.
(Solucin) Consulte la descripcin para Servo - 064 PHAL alarm.
SRVO-087 WARN BLAL alarm (Track enc:%d)
(Causa)
Esta alarma se origina cuando se ha agotado la tensin de la batera para realizar copias
de seguridad de los datos de posicin del encoder.
(Solucin) Consulte la descripcin para Servo - 065 BLAL alarm.
SRVO-089 WARN OHAL2 alarm (Track enc:%d)
(Causa)
El motor se ha recalentado.
(Solucin) Consulte la descripcin para Servo - 067 OHAL2 alarm.
SRVO-090 WARN DTERR alarm (Track enc:%d)
(Causa)
Se ha producido un error durante la comunicacin entre el encoder y la tarjeta de circuito
impreso de la CPU principal.
(Solucin) Consulte la descripcin para Servo - 068 DTERR alarm.
-1299-
APENDICE D
B-82284ES-3/01
SRVO-091 WARN CRCERR alarm (Track enc:%d)
(Causa)
Se ha producido un error durante la comunicacin entre el encoder y la tarjeta de circuito
impreso de la CPU principal.
(Solucin) Consulte la descripcin para Servo - 069 CRCERR alarm.
SRVO-092 WARN STBERR alarm (Track enc:%d)
(Causa)
Se ha producido un error durante la comunicacin entre el encoder y la tarjeta de circuito
impreso de la CPU principal.
(Solucin) Consulte la descripcin de Servo - 070 STBERR alarm.
SRVO-093 WARN SPHAL alarm (Track enc:%d)
(Causa)
Esta alarma es emitida cuando la velocidad de realimentacin es muy grande.
(Solucin) Consulte la descripcin de Servo - 071 SPHAL alarm.
SRVO-094 WARN PMAL alarm (Track enc:%d)
(Causa)
Puede que el encoder sea defectuoso.
(Solucin) Consulte la descripcin de Servo - 072 PMAL alarm.
SRVO-095 WARN CMAL alarm (Track enc:%d)
(Causa)
Puede que el encoder sea defectuoso.
O puede que el ruido provoque que el encoder no funcione correctamente.
(Solucin) Consulte la descripcin de Servo - 073 CMAL alarm.
SRVO-096 WARN LDAL alarm (Track enc:%d)
(Causa)
El LED del encoder se ha desconectado.
(Solucin) Consulte la descripcin de Servo - 074 LDAL alarm.
SRVO-097 WARN Pulse not established(Enc:%d)
(Causa)
Todava no se ha establecido la posicin absoluta del encoder.
(Solucin) Consulte la descripcin de Servo - 075 Pulse not established.
SRVO-101 SERVO Robot overtravel(Robot:%d)
(Causa)
Se ha activado un interruptor de lmite de sobredesplazamiento del robot.
(Solucin) Consulte SRVO-005.
SRVO-102 SERVO Hand broken (Robot:%d)
(Causa)
La seal de pinza rota del robot (*HBK) est activada.
(Solucin) Consulte SRVO-006.
SRVO-103 SERVO Air pressure alarm(Rbt:%d)
(Causa)
La entrada de presin neumtica del robot (PPABN) est activada.
(Solucin) Consulte SRVO-009.
-1300-
APENDICE D
B-82284ES-3/01
SRVO-105 SERVO Door open or E.Stop
(Causa)
La puerta del controlador est abierta.
O las seales de E-stop son detectadas en un tiempo corto.
O una desconexin en el cableado del hardware.
(Solucin) Cerrar la puerta del controlador.
Y pulsar RESET.
Si el reinicio no es efectivo, corregir la conexin del hardware.
SRVO-106 SERVO Door open/E.Stop (Robot:%d)
(Causa)
La puerta del controlador est abierta.
Ha sido detectada temporalmente una seal de stop de emergencia.
Ha sucedido una desconexin del hardware.
(Solucin) Cierre la puerta del controlador y pulse la tecla de reinicio.
Si no se reinicia, repare el cableado del hardware.
SRVO-108 SERVO Press RESET to enable robot
(Causa)
Cuando el interruptor de activacin/desactivacin est configurado como "Activado",
es necesario el reinicio.
(Solucin) Para activar el robot, pulse la tecla de reinicio.
SRVO-111 SERVO Softfloat time out (G:%d)
(Causa)
Se acaba el tiempo de seguimiento cuando la paleta flexible est desconectada.
(Solucin) Alargue $SFLT_FUPTIM.
SRVO-112 PAUSE.G Softfloat time out (G:%d)
(Causa)
Se acaba el tiempo de seguimiento cuando la paleta flexible est desconectada.
(Solucin) Alargue $SFLT_FUPTIM.
SRVO-121 SERVO Excessive acc/dec time(G:%d)
(Causa)
El tiempo de aceleracin es mucho ms largo.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
SRVO-122 SERVO Bad last ang(internal) (G:%d)
(Causa)
La peticin de actualizacin del ltimo ngulo no coincide con el ngulo actual.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
SRVO-126 SERVO Quick stop error (G:%d)
(Causa)
El programa se ha terminado durante un paro rpido.
(Solucin) Pulse reiniciar
SRVO-130 SERVO OHAL1(PSM) alarm (G:%d A:%d)
(Causa)
El servoamplificador (PSM) se ha recalentado.
(Solucin) Reduzca el ciclo de servicio.
SRVO-131 SERVO LVAL(PSM) alarm (G:%d A:%d)
(Causa)
La tensin DC en el circuito de potencia principal del servoamplificador es inferior a la
especificacin incluso si MCC est activo.
(Solucin) Consulte el manual de mantenimiento.
-1301-
APENDICE D
B-82284ES-3/01
SRVO-132 SERVO HCAL(PSM) alarm(G:%d A:%d)
(Causa)
La corriente del circuito de potencia principal del servoamplificador supera la indicada.
(Solucin) Consulte el manual de mantenimiento.
SRVO-133 SERVO FSAL(PSM) alarm (G:%d A:%d)
(Causa)
El ventilador de refrigeracin para el circuito de control se detiene.
(Solucin) Consulte el manual de mantenimiento.
SRVO-134 SERVO DCLVAL(PSM) alarm (G:%d A:%d)
(Causa)
El circuito de carga de seguridad para el amplificador presenta problemas.
(Solucin) Compruebe los cables y las conexiones entre el amplificador (CN1) y MCC.
pruebe el fusible (F1, F3) del transformador.
Si se utiliza el armario B
Sustituya la tarjeta de circuito impresa de control EMG.
Sustituir el servoamplificador.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-135 WARN FSAL alarm (G:%d A:%d)
(Causa)
El ventilador de refrigeracin para el circuito de control se detiene.
(Solucin) Compruebe o sustituya el ventilador.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-136 SERVO DCLVAL alarm (G:%d A:%d)
(Causa)
El circuito de carga de seguridad para el amplificador presenta problemas.
(Solucin) Compruebe los cables y las conexiones entre el amplificador (CN1) y MCC.
Pruebe el fusible (F1, F3) del transformador.
Si se utiliza el armario B
Sustituya la tarjeta de circuito impresa de control EMG.
Sustituir el servoamplificador.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-138 SERVO SDAL alarm (G:%d A:%d)
(Causa)
Se ha detectado un error de seal del encoder por el software.
La causa probable es el ruido o un fallo (desconexin) en el circuito interno del encoder.
(Solucin) Si una operacin normal puede ser reanudada apagando el controlador y encendindolo
de nuevo, es lo ms probable que la causa sea el ruido.
Mejore la proteccin del cable del encoder.
Si una operacin normal no puede ser reanudada apagando el controlador y
encendindolo de nuevo, el encoder est defectuoso.
Sustityalo, y realice una masterizacin.
SRVO-156 SERVO IPMAL alarm (G:%d A:%d)
(Causa)
El mdulo IPM presenta problemas.
(Solucin) Consulte el manual de mantenimiento.
-1302-
APENDICE D
B-82284ES-3/01
SRVO-157 SERVO CHGAL alarm (G:%d A:%d)
(Causa)
La carga del circuito principal no se ha podido completar en el tiempo especificado.
(Solucin) Puede haber un cortocircuito en la conexin DC. Compruebe las conexiones.
Es posible que la resistencia elctrica para restringir la corriente de carga est
defectuosa.
Sustituya la tarjeta de cableado.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-171 WARN MotorSpd lim/DVC (G:%d A:%d)
(Causa)
La velocidad del motor actual estaba a punto de exceder la velocidad mxima permitida
($PARAM_GROUP[i]. $MOT_SPD_LIM[j]).
Estaba sujeto con abrazaderas a la mxima velocidad permitida.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
SRVO-179 WARN Motor torque limit (G:%d A:%d)
(Causa)
El par de apriete del eje ha superado el lmite.
(Solucin) Se trata de un mensaje de advertencia. No es necesario realizar ninguna accin.
SRVO-182 PAUSE Needed init. has not been done
(Causa)
Esto es un error interno al sistema.
Una variable de sistema o memoria de trabajo interna no ha sido iniciada normalmente.
(Solucin)
Desconecte la potencia y vuelva a conectarla..
1. Apague.
2. Encienda.
3. Si la alarma es an emitida, anote lo que caus esta alarma, y entonces contacte el
personal de servicio.
SRVO-183 PAUSE ROBOT isn't ready
(Causa)
La activacin del servo est desconectada.
(Solucin) Elimine el factor que ha desconectado la activacin del servo y pulse el botn de
reinicio.
SRVO-184 PAUSE Other task is processing
(Causa)
El rea de datos que esta instruccin debe utilizar est bloqueada por otra tarea.
(Solucin) Ejecute la instruccin cuando la tarea que utiliza el rea de datos haya finalizado.
SRVO-185 PAUSE Data is for other group
(Causa)
Los datos que la instruccin intenta utilizar pertenecen a otro grupo.
(Solucin) Recoja los datos del grupo deseado antes de ejecutar la instruccin.
SRVO-186 PAUSE Needed Data has not been got
(Causa)
No se han recopilado datos, o stos no pertenecen al modo deseado.
(Solucin) Recopile los datos necesarios antes de ejecutar la instruccin.
SRVO-187 PAUSE Need specfing Mass
(Causa)
Para calcular la informacin de carga de este tipo requiere que se especifique la masa
de la carga.
(Solucin) Indique la masa de la carga antes de calcular la informacin de carga.
-1303-
APENDICE D
B-82284ES-3/01
SRVO-191 SYSTEM Illegal Joint Speed (G:%d A:%d)
(Causa)
El comando de movimiento supera la indicacin.
(Solucin) Error de movimiento interno.Pngase en contacto con el servicio de asistencia tcnica
de FANUC de su zona.
SRVO-194 SERVO Servo disconnect
(Causa)
La seal de desconexin servo es introducida.
En el bloque terminal de la tarjeta de circuito impresa del panel del operador no se ha establecido
ninguna conexin entre las seales SD4-SD41 y SD5-SD51.
(Solucin 1) Si se utiliza la seal de desconexin servo, elimine el origen del fallo y pulse RESET.
(Solucin 2) Si no usa la seal de desconexin servo, compruebe el cableado en SD4-SD41 o
SD5-SD51.
(Solucin 3) Para ms informacin, consulte el manual de mantenimiento.
SRVO-199 PAUSE Control Stop
(Causa)
Se detecta un paro de control.
(Solucin) Tras esta alarma, es detectada la verja abierta o la introduccin de la alarma SVOFF.
Consulte la solucin de la siguiente alarma.
SRVO-201 SERVO Panel E-stop or SVEMG abnormal
(Causa)
Se ha activado el botn de paro de emergencia del panel del operador o el cableado de
la seal SVEMG es incorrecta.
(Solucin 1) Liberar el botn de paro de emergencia en el panel del operador, y pulsar el botn de
reinicio.
(Solucin 2) Sustituir la placa del panel.
(Solucin 3) Sustituya la unidad de control de paro de emergencia.
(Solucin 4) Sustituya el servoamplificador.
(Solucin 5) Para ms informacin, consulte el manual de mantenimiento.
SRVO-202 SERVO TP E-stop or SVEMG abnormal
(Causa)
Se ha activado el botn de paro de emergencia en la consola de programacin o el
cableado de la seal SVEMG es incorrecta.
(Solucin 1) Liberar el botn de paro de emergencia en la consola de programacin, y pulsar el botn
de reinicio.
(Solucin 2) Sustituya la Consola de programacin
(Solucin 3) Comprobar el cable de la consola y sustityalo si tiene un problema.
(Solucin 4) Sustituir la placa del panel.
(Solucin 5) Sustituya la unidad de control de paro de emergencia.
(Solucin 6) Sustituya el servoamplificador.
(Solucin 7) Para ms informacin, consulte el manual de mantenimiento. Esta alarma se puede
activar si el botn de PARO DE EMERGENCIA se pulsa lentamente.
-1304-
APENDICE D
B-82284ES-3/01
SRVO-204 SYSTEM External (SVEMG abnormal) E-stop
(Causa)
Se ha introducido una seal de paro de emergencia externa mientras el cableado del
SVEMG era anormal.
(Solucin 1) Comprobar el cambio y el cable del paro de emergencia externo conectado al bloque
terminal de la tarjeta de circuito impreso del panel del operador.
(Solucin 2) Sustituir la placa del panel.
(Solucin 3) Sustituya la unidad de paro de emergencia.
(Solucin 4) Sustituya el servoamplificador.
(Solucin 5) Para ms informacin, consulte el manual de mantenimiento.
SRVO-205 SYSTEM Verja abierta (SVEMG anormal)
(Causa)
La verja fue abierta mientras el cableado de SVEMG era anormal.
(Solucin 1) Comprobar el cambio y el cable de la verja de seguridad conectado al bloque terminal
de la tarjeta de circuito impreso del panel del operador.
(Solucin 2) Sustituir la placa del panel.
(Solucin 3) Sustituya la unidad de paro de emergencia.
(Solucin 4) Sustituya el servoamplificador.
(Solucin 5) Para ms informacin, consulte el manual de mantenimiento.
SRVO-206 SYSTEM Deadman switch (SVEMG abnormal)
(Causa)
El cambio de deadman (hombre muerto) fue liberado mientras el cableado de SVEMG
era anormal.
(Solucin 1) Sustituya la consola de programacin.
(Solucin 2) Compruebe el cable de la consola de programacin.
Si tiene un problema, sustituya el cable.
(Solucin 3) Sustituya la placa del panel.
(Solucin 4) Cuando la seal NTED es usada, comprobar si el cableado de la seal conectado al
CRM65 en la placa del panel es correcta.
(Solucin 5) Sustituya la unidad de paro de emergencia.
(Solucin 6) Sustituya el servoamplificador.
(Solucin 7) Para ms informacin, consulte el manual de mantenimiento.
SRVO-207 SERVO TP switch abnormal or Door open
(Causa)
Mientras la consola de programacin fue activada, el cambio del deadman fue sujetado,
y la verja estaba abierta, la puerta del controlador estaba abierta, o el cableado del
SVEMG era incorrecto.
(Solucin) Cierre la puerta del controlador y pulse el botn de reinicio.
Si la puerta no estaba abierta, el cableado de SVEMG es incorrecto. Corregirlo.
SRVO-209 SERVO Robot-2 SVEMG abnormal
(Causa)
Se ha detectado una desconexin de la seal SVEMG para el robot 2.
(Solucin) Apagar.
Recablear el SVEMG del controlador del robot 2.
Cerrar el circuito de la verja, y pulsar el botn de reinicio.
-1305-
APENDICE D
B-82284ES-3/01
SRVO-211 SERVO TP OFF in T1, T2
(Causa)
La consola de programacin estaba desactivada mientras el interruptor de modo estaba
configurado en la posicin T1 o T2 y los robots 1 y 2 desconectados.
Tambin es posible que haya un cable roto en el hardware.
(Solucin) Ajustar el cambio activado/desactivado en la consola de programacin en "on", y pulsar
la tecla de reinicio.
Si no se produce el reinicio, reparar el cableado del hardware.
SRVO-213 SERVO Panel Board fuse blown
(Causa)
Se ha fundido el fusible de la placa del panel.
(Solucin) Sustituya el fusible en la tarjeta del panel
Consulte el manual de mantenimiento.
SRVO-214 SERVO 6ch amplifier fuse blown (R:%d)
(Causa)
Se ha fundido un fusible en el amplificador de 6 canales.
El nmero en el soporte indica en qu amplificador de 6 canales se encuentra el fusible
fundido.
(Solucin) Sustituya el fusible en el amplificador de 6 canales.
Consulte el manual de mantenimiento.
SRVO-215 SERVO Brake Unit fuse blown (R:%d)
(Causa)
El fusible en la unidad de freno o en la unidad de cambio de herramienta (pistola) se ha
fundido.
El nmero en el soporte indica a qu amplificador de 6 canales est conectada la unidad
de freno.
(Solucin) Sustituir el fusible en la unidad de freno o en la unidad de cambio de herramienta (pinza)
Consulte el manual de mantenimiento.
SRVO-216 SERVO OVC (total) (%d)
(Causa)
La corriente que fluye a travs del cable del robot ha sobrepasado su lmite.
(Solucin) Modifique el programa de manera que las condiciones de funcionamiento sean menos
duras.
SRVO-221 SERVO Lack of DSP (G:%d A:%d)
(Causa)
La tarjeta de control adecuada del eje que corresponde al eje del software total no ha
sido montada.
(Solucin) Comprobar que el nmero total de ejes de la tarjeta de control de ejes es suficiente para
la cantidad de ejes del software.
Reemplazar la tarjeta de control de ejes con una que tenga suficientes DSP si fuera
necesario.
Tambin puede cambiar la configuracin de los ejes del software.
SRVO-222 SERVO Lack of Amp (Amp:%d)
(Causa)
No hay mdulo de amplificadores.
(Solucin) Compruebe que el cable de fibra est conectado correctamente al amplificador.
Sustituya el cable de fibra que conduce al amplificador.
Compruebe que la tensin del amplificador es normal.
Comprobar que la configuracin del nmero de ejes de iniciacio del hardware y el
nmero de amp son especificados correctamente.
-1306-
APENDICE D
B-82284ES-3/01
SRVO-223 SERVO DSP dry run (%d,%d)
(Causa)
La inicializacin del servosistema fue detenida debido a un fallo del hardware o a una
impropia configuracin del software.
El controlador ha sido iniciado en el modo "dry run DSP".
(Solucin 1) Cuando el primer nmero es 1,5,6, 11:
Se ha producido una alarma mediante la configuracin del software.
Comprobar si el modo "DSP dry run" es configurado ($scr.$startup_cnd = 12) o la
configuracin del nmero de ejes del inicio del hardware.
(Solucin 2) Cuando el primer nmero es 2,3,4, 7:
Sustituya la tarjeta servo.
(Solucin 3) Cuando el primer nmero es 8 10:
Consulte SRVO-058.
(Solucin 4) Cuando el primer nmero es 9:
Comprobar si el servoamplificador est conectado o no.
Comprobar si es suministrada la alimentacin al amplificador o no.
Comprobar si el fusible en el amplificador est fundido o no.
Reemplazar el cable FSSB (cable de fibra ptica).
Reemplazar el servoamplificador.
(Solucin 5) Cuando el primer nmero es 12:
Consulte SRVO-059.
SRVO-230 SERVO Chain 1 abnormal %x,%x
(Causa)
Ha sucedido un error entre las seales de seguridad duplicadas.
(Solucin) Tras limpiar el origen de la alarma, encadenar la operacin de reinicio en la pantalla de
configuracin del sistema o la pantalla activa de la alarma.
Pulsar la tecla de reinicio en la consola de programacin.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-231 SERVO Chain 2 abnormal %x,%x
(Causa)
Ha sucedido un error entre las seales de seguridad duplicadas.
(Solucin) Tras limpiar el origen de la alarma, encadenar la operacin de reinicio en la pantalla de
configuracin del sistema o la pantalla activa de la alarma.
Pulsar la tecla de reinicio en la consola de programacin.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-232 SERVO NTED input
(Causa)
En el modo de programacin, se introdujo la seal NTED (dispositivo de habilitacin
no experto) conectada al CRM65 en la placa del panel.
(Solucin 1) Comprobar la operacin del dispositivo conectado al NTED.
(Solucin 2) Sustituya la consola de programacin.
(Solucin 3) Sustituya el cable de la consola de programacin.
(Solucin 4) Sustituya la placa del panel.
(Solucin 5) Compruebe el cambio de modo y su cable. Sustityalos si se detecta un defecto.
-1307-
APENDICE D
B-82284ES-3/01
SRVO-233 SERVO TP OFF in T1, T2/Door open
(Causa)
El interruptor de modo est configurado en la posicin T1 o T2, y la consola de
programacin est desactivada.
La puerta del controlador est abierta. Tambin es posible que se haya producido una
desconexin en el hardware.
(Solucin) Tras ajustar el cambio activado/desactivado en la consola de programacin en "on",
cerrar la puerta del controlador y pulsar la tecla de reinicio.
Si no se produce el reinicio, reparar el cableado del hardware.
Consulte el manual de mantenimiento.
SRVO-234 WARN Deadman switch released
(Causa)
Se ha liberado el interruptor deadman de la consola de programacin.
(Solucin) Se trata de un mensaje de advertencia.
SRVO-235 SERVO Short term Chain abnormal
(Causa)
Se ha detectado un fallo de cadena temporal.
(Solucin) Si este fallo se produce junto con la alarma "deadman switch released" , libere el
interruptor deadman y vuelva a activarlo.
Esta alarma pudo ocurrir por estar el interruptor deadman medio liberado o debido a la
operacin a medias del interruptor de la parada de emergencia.
Si este fallo se produce simultneamente con cualquier otro error relacionado con la
seguridad, provoque el mismo error y pulse la tecla de reinicio.
SRVO-236 WARN Chain failure is repaired
(Causa)
Se ha eliminado un fallo de cadena.
(Solucin) Cuando el sistema ha vuelto a comprobar el fallo de cadena, ste se haba eliminado.
Pulse la tecla de reinicio.
SRVO-237 WARN Cannot reset chain failure
(Causa)
Ha fallado el intento de reiniciar el fallo de cadena.
(Solucin 1) Eliminar la causa del fallo de cadena.
(Solucin 2) Pulse el botn de paro de emergencia de la consola de programacin, y grelo en el
sentido de las agujas del reloj para liberarlo.
(Solucin 3) Efectuar la operacin de reinicio de cadena.
(Solucin 4) Pulse la tecla de reinicio.
SRVO-240 SERVO Chain 1 (FENCE) abnormal
(Causa)
Cuando el circuito de la verja estaba abierto, se produjo un fallo de cadena 1 (+24V).
(Solucin) Repare el circuito de la cadena 1 (+24 V) en el hardware de la verja.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
-1308-
APENDICE D
B-82284ES-3/01
SRVO-241 SERVO Chain 2 (FENCE) abnormal
(Causa)
Cuando el circuito de la verja estaba abierto, se produjo un fallo de cadena 2 (0 V).
(Solucin) Repare el circuito de la cadena 2 (0 V) en el hardware de la verja.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-242 SERVO Chain 1 (EXEMG) abnormal
(Causa)
Cuando se introdujo una seal de paro de emergencia externo, se produjo un fallo de la
cadena 1 (+24 V).
(Solucin) Repare el circuito de la cadena 1 (+24 V) en el hardware de paro de emergencia externo.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes". Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-243 SERVO Chain 2 (EXEMG) abnormal
(Causa)
Cuando se introdujo una seal de paro de emergencia externo, se produjo un fallo de la
cadena 2 (0 V).
(Solucin) Repare el circuito de la cadena 2 (0 V) en el hardware de la verja.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-244 SERVO Chain 1 abnormal (Rbt:%d)
(Causa)
Se ha producido un fallo en la cadena 1 (+24 V).
(Solucin) Repare el circuito de la cadena 1 (+24 V) en el hardware.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-245 SERVO Chain 2 abnormal (Rbt:%d)
(Causa)
Se ha producido un fallo en la cadena 2 (0 V).
(Solucin) Repare el circuito de la cadena 2 (0 V) en el hardware.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-246 SERVO Chain 1 abnormal (EX_robot)
(Causa)
Se ha producido un fallo en la cadena 1 (+24 V) en un robot adicional (un tercer robot,
como un posicionador o un eje adicional).
(Solucin) Repare el circuito de la cadena 1 (+24 V) en el hardware.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
-1309-
APENDICE D
B-82284ES-3/01
SRVO-247 SERVO Chain 2 abnormal (EX_robot)
(Causa)
Se ha producido un fallo en la cadena 2 (0 V) en un robot adicional (un tercer robot,
como un posicionador o un eje adicional).
(Solucin) Repare el circuito de la cadena 2 (0 V) en el hardware.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-251 SERVO DB relay abnormal (G:%d A:%d)
(Causa)
Se ha detectado un fallo en el rel interno (rel DB) del servoamplificador.
(Solucin) Sustituya el servoamplificador.
SRVO-252 SERVO Current detect abnl(G:%d A:%d)
(Causa)
Se ha detectado un fallo en el circuito de deteccin de la corriente en el
servoamplificador.
(Solucin) Sustituya el servoamplificador.
SRVO-253 SERVO Amp internal over heat (G:%d A:%d)
(Causa)
Se ha detectado un recalentamiento en el servoamplificador.
(Solucin) Sustituya el servoamplificador.
SRVO-254 SERVO E-STOP circuit abnormal (KA5)
(Causa)
La soldadura se produce en el rel de seguridad de la unidad de parada de emergencia.
(Solucin)
Sustituya la unidad de paro de emergencia.
SRVO-255 SERVO E-STOP circuit abnormal (KM2)
(Causa)
Se produce una soldadura en el rel de seguridad de la unidad de parada de emergencia.
(Solucin)
Sustituya la unidad de paro de emergencia.
SRVO-256 SERVO MCC control circuit abnormal (AMP)
(Causa)
La seal de control MCC del amplificador de 6 canales es abnormal.
(Solucin) Sustituya el amplificador de 6 canales.
SRVO-266 SERVO FENCE1 status abnormal
(Causa)
Cuando se introdujo la seal de la verja, FENCE1 permaneci activado.
(Solucin) Reparar el circuito FENCE1.
Consulte el manual de mantenimiento.
SRVO-267 SERVO FENCE2 status abnormal
(Causa)
Cuando se introdujo la seal de la verja, FENCE2 permaneci activado.
(Solucin) Reparar el circuito FENCE2.
Consulte el manual de mantenimiento.
SRVO-268 SERVO SVOFF1 status abnormal
(Causa)
Cuando se introdujo la seal SVOFF, SVOFF1 permaneci activado.
(Solucin) Reparar el circuito SVOFF1.
Consulte el manual de mantenimiento.
-1310-
APENDICE D
B-82284ES-3/01
SRVO-269 SERVO SVOFF2 status abnormal
(Causa)
Cuando se introdujo la seal SVOFF, SVOFF2 permaneci activado.
(Solucin) Reparar el circuito SVOFF2.
Consulte el manual de mantenimiento.
SRVO-270 SERVO EXEMG1 status abnormal
(Causa)
Cuando se introdujo la seal de paro de emergencia externo, EXEMG1 permaneci
activado.
(Solucin) Reparar el circuito EXEMG1.
Consulte el manual de mantenimiento.
SRVO-271 SERVO EXEMG2 status abnormal
(Causa)
Cuando se introdujo la seal de paro de emergencia externo, EXEMG2 permaneci
activado.
(Solucin) Reparar el circuito EXEMG2.
Consulte el manual de mantenimiento.
SRVO-272 SERVO SVDISC1 status abnormal
(Causa)
Cuando se introdujo la seal de desconexin del servomotor, SVDISC1 permaneci
activado.
(Solucin) Reparar el circuito SVDISC1.
Consulte el manual de mantenimiento.
SRVO-273 SERVO SVDISC2 status abnormal
(Causa)
Cuando se introdujo la seal de desconexin del servomotor, SVDISC2 permaneci
activado.
(Solucin) Reparar el circuito SVDISC2.
Consulte el manual de mantenimiento.
SRVO-274 SERVO NTED1 status abnormal
(Causa)
Cuando se introdujo la seal NTED, NTED1 permaneci activado.
(Solucin) Reparar el circuito NTED1.
Consulte el manual de mantenimiento.
SRVO-275 SERVO NTED2 status abnormal
(Causa)
Cuando se introdujo la seal NTED, NTED2 permaneci activado.
(Solucin) Reparar el circuito NTED2.
Consulte el manual de mantenimiento.
SRVO-276 SERVO Disable on T2 mode
(Causa)
El robot no puede funcionar en el modo T2.
(Solucin) Configure el interruptor de modo en T1 o en la posicin auto.
SRVO-277 SYSTEM Panel E-stop (SVEMG abnormal)
(Causa)
Cuando se activ el botn de paro de emergencia del panel del operador, no se introdujo
la seal SVEMG.
(Solucin) El cableado de SVEMG no es correcto. Corrjalo y vuelva a conectar la potencia.
Para ms informacin, consulte el manual de mantenimiento.
-1311-
APENDICE D
B-82284ES-3/01
SRVO-278 SYSTEM TP E-stop (SVEMG abnormal)
(Causa)
Cuando se activ el botn de paro de emergencia de la consola de programacin, no se
introdujo la seal SVEMG.
(Solucin) El cableado de SVEMG no es correcto. Corrjalo y vuelva a conectar la potencia.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-280 SERVO SVOFF input
(Causa)
Se ha introducido SVOFF (seal de desconexin del servo).
(Solucin) Busque el motivo de la introduccin de SVOFF y elimnelo.
SRVO-281 SYSTEM SVOFF input (SVEMG abnormal)
(Causa)
Se ha detectado el circuito de entrada de SVOFF y la desconexin de SVEMG.
(Solucin) Apagar.
Reparar el cableado del SVEMG.
Cerrar el circuito de entrada SVOFF, y pulsar la tecla de reinicio.
Consulte el manual de mantenimiento.
SRVO-282 SERVO Chain 1 (SVOFF) abnormal
(Causa)
Cuando se introdujo SVOFF (seal de desconexin del servo), se produjo un fallo en la
cadena 1 (+24 V).
(Solucin) Repare el circuito de la cadena 1 (+24 V) en el hardware SVOFF.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-283 SERVO Chain 2 (SVOFF) abnormal
(Causa)
Cuando se introdujo SVOFF (seal de desconexin del servo), se produjo un fallo en la
cadena 2 (0 V).
(Solucin) Repare el circuito de la cadena 2 (0 V) en el hardware SVOFF.
En la pantalla de configuracin del sistema, establezca el reinicio del fallo de la cadena
como "Yes".
Pulse la tecla de reinicio de la consola de programacin.
Consulte el manual de mantenimiento.
SRVO-290 SERVO DClink HC alarm (G:%d A:%d)
(Causa)
Ha circulado una corriente anormal a travs del circuito de enlace DC del amplificador.
(Solucin) Es posible que exista un cortocircuito en una lnea de potencia o en la bobina del motor.
Consulte el manual de mantenimiento.
SRVO-291 SERVO IPM over heat (G:%d A:%d)
(Causa)
Se ha detectado que el elemento IPM del amplificador se ha recalentado.
(Solucin) Reduzca el ciclo de funcionamiento.
Si este sntoma se produce con frecuencia, sustituya el amplificador.
-1312-
APENDICE D
B-82284ES-3/01
SRVO-292 SERVO EXT.FAN alarm (G:%d A:%d)
(Causa)
Un ventilador para la refrigeracin del elemento de liberacin de calor del amplificador
est defectuoso.
(Solucin) Sustituya el ventilador de refrigeracin.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-293 SERVO DClink (PSM) HCAL (G:%d A:%d)
(Causa)
Ha circulado una corriente anormal a travs del circuito de enlace DC del amplificador
PSM.
(Solucin) Es posible que exista un cortocircuito en una lnea de potencia o en la bobina del motor.
Consulte el manual de mantenimiento.
SRVO-294 SERVO EXT.FAN (PSM) alarm (G:%d A:%d)
(Causa)
Un ventilador para la refrigeracin del amplificador PSM est defectuoso.
(Solucin) Sustituya el ventilador de refrigeracin.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-295 SERVO SVM COM alarm (G:%d A:%d)
(Causa)
Se ha producido un error de comunicacin entre el PSM y SVM.
(Solucin) Reemplace el cable entre el PSM y el SVM. Tambin pude sustituir el SVM o el PSM.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-296 SERVO PSM DISCHG alm (G:%d A:%d)
(Causa)
La potencia generada en el PSM es excesiva.
(Solucin) Compruebe si el ventilador de refrigeracin de la resistencia regenerativa del PSMR
est funcionando. Si el ventilador funciona, es posible que las condiciones de trabajo
sean agresivas. Reduzca la velocidad de programacin establecida en el programa.
Para ms informacin, consulte el manual de mantenimiento.
SRVO-297 SERVO PSM LowVolt alm (G:%d A:%d)
(Causa)
La tensin de la unidad de alimentacin de control de PSM ha disminuido.
(Solucin) Compruebe que la tensin de entrada trifsica sea baja. Sustituya el PSM o el PSMR si
fuera necesario.
Para ms informacin, consulte el manual de mantenimiento.
-1313-
APENDICE D
B-82284ES-3/01
SRVO-298 SERVO SRVO velocity alm (G:%d A:%d)
(Causa)
La velocidad calculada en el servocircuito es anormal.
(Solucin) Pngase en contacto con el personal de servicio tcnico. Para reiniciar la condicin de
alarma, es necesario desconectar la potencia y volverla a conectar.
SRVO-300 SERVO Hand broken/HBK disabled
(Causa)
Cuando la configuracin HBK est desactivada, se detecta una seal de pinza rota.
(Solucin) Para suprimir la condicin de alarma, pulse el botn de reinicio.
Compruebe si el circuito de la seal de pinza rota est conectado al robot.
Si el circuito est conectado al robot, active la configuracin de pinza rota.
Consulte el manual de mantenimiento.
SRVO-301 SERVO Hand broken/HBK dsbl (Rbt:%d)
(Causa)
Cuando la configuracin HBK est desactivada, se detecta una seal de pinza rota.
(Solucin) Para suprimir la condicin de alarma, pulse el botn de reinicio.
Compruebe si el circuito de la seal de pinza rota est conectado al robot.
Si el circuito est conectado al robot, active la configuracin de pinza rota.
Consulte el manual de mantenimiento.
SRVO-302 SERVO Set Hand broken to ENABLE
(Causa)
Cuando la configuracin HBK est desactivada, se introduce una seal de pinza rota.
La configuracin de pinza rota no es correcta.
(Solucin) Active pinza rota.
Para suprimir la condicin de alarma, pulse el botn de reinicio.
Consulte el manual de mantenimiento.
SRVO-303 SERVO Set HBK to ENABLE (Rbt:%d)
(Causa)
Cuando la configuracin HBK est desactivada, se introduce una seal de pinza rota.
La configuracin de pinza rota no es correcta.
(Solucin) Active pinza rota.
Para suprimir la condicin de alarma, pulse el botn de reinicio.
Consulte el manual de mantenimiento.
SRVO-310 SERVO ABC Unexpected Motion (G:%d)
(Causa)
La posicin actual del robot que ha calculado el software es abnormal.
(Solucin 1) Los datos de masterizacin podran ser errneos.
Comprobar si los datos de copia de seguridad errneos han sido reestablecidos o si la
masterizacin ha sido ejecutada en la posicin equvoca.
Ejecutar la masterizacin en ese caso.
(Solucin 2) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1314-
APENDICE D
B-82284ES-3/01
SRVO-335 SERVO DCS OFFCHK alarm a,b
(Causa)
Se ha detectado un fallo en el circuito de entrada de la seal de seguridad.
(Solucin) Sustituya la placa del panel. Consulte el manual de mantenimiento.
SRVO-336 SERVO DCS RAMCHK alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-337 SERVO DCS PRMCHK alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-338 SERVO DCS FLOW alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-339 SERVO DCS MISC alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-340 SERVO DCS T1 TCP speed(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-341 SERVO DCS T1 flange speed(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-342 SERVO DCS Cartesian position(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-343 SERVO DCS Cartesian speed(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
-1315-
APENDICE D
B-82284ES-3/01
SRVO-344 SERVO DCS GRP alarm(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-345 SERVO DCS Joint position(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-346 SERVO DCS Joint speed(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-347 SERVO DCS AXS alarm(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-348 SERVO DCS MCC OFF alarm a,b
(Causa)
Ha fallado el intento de reiniciar el fallo de cadena.
(Solucin 1) Sustituya la unidad de paro de emergencia.
(Solucin 2) Sustituya la placa del panel.
(Solucin 3) Si hay cualquier seal para ser conectada a la unidad de parada de emergencia,
comprobar para ver si existe algn problema con el origen de la seal.
Consulte el manual de mantenimiento.
SRVO-349 SERVO DCS MCC ON alarm a,b
(Causa)
Una instruccin "on" ha sido emitida al contactor electromagntico, pero el contactor
no se puso en ON.
(Solucin 1) Sustituya la unidad de paro de emergencia.
(Solucin 2) Sustituya la placa del panel.
(Solucin 3) Sustituya el servoamplificador.
(Solucin 4) Consulte el manual de mantenimiento.
SRVO-350 SERVO DCS CPU alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
-1316-
APENDICE D
B-82284ES-3/01
SRVO-351 SERVO DCS CRC alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-352 SERVO DCS COUNT1 alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-353 SERVO DCS COUNT2 alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-354 SERVO DCS DICHK alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-355 SERVO DCS ITP_TIME alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-356 SERVO DCS ITP_SCAN alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-357 SERVO DCS ENABLED alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-358 SERVO DCS INVPRM alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-359 SERVO DCS SYSTEM alarm a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
-1317-
APENDICE D
B-82284ES-3/01
SRVO-360 SERVO DCS CC_TCP alarm(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-361 SERVO DCS CC_FP alarm(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-362 SERVO DCS CC_TCPS alarm(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-363 SERVO DCS CC_FPS alarm(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-364 SERVO DCS PRMCRC alarm(Gi) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-365 SERVO DCS FB_CMP alarm(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-366 SERVO DCS FB_INFO alarm(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-367 SERVO DCS CC_JPOS alarm(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-368 SERVO DCS CC_JSPD alarm(Gi,Aj) a,b
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el personal de servicio tcnico.
SRVO-370 SERVO SVON1 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal interna de la placa del panel (SVON).
(Solucin) Sustituya la placa del panel.
-1318-
APENDICE D
B-82284ES-3/01
SRVO-371 SERVO SVON2 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal interna de la placa del panel (SVON).
(Solucin) Sustituya la placa del panel.
NOTA
Advertencia para SRVO-370,371
1 Para el procedimiento de recuperacin de esta alarma, consultar la descripcin de
SRVO-230 o SRVO-231.
2 Si esta alarma es emitida, no reiniciar la alarma de error de cadena hasta que el fallo es
comprobado y corregido.
Si contina usando el robot con uno de los circuitos duplicados estando defectuoso, no se puede
garantizar seguridad en el momento que el otro circuito falla.
SRVO-372 SERVO OPEMG1 status abnormal
(Causa)
Se ha detectado una alarma de cadena con el interruptor de parada de emergencia en la
placa del panel.
(Solucin 1) Sustituya la placa del panel.
(Solucin 2) Sustituya el cable de la consola de programacin.
(Solucin 3) Sustituya la consola de programacin.
(Solucin 4) Reeplazar el botn de parada de emergencia en la placa del panel.
SRVO-373 SERVO OPEMG2 status abnormal
(Causa)
Se ha detectado una alarma de cadena con el interruptor de parada de emergencia en la
placa del panel.
(Solucin 1) Sustituya la placa del panel.
(Solucin 2) Sustituya el cable de la consola de programacin.
(Solucin 3) Sustituya la consola de programacin.
(Solucin 4) Reeplazar el botn de parada de emergencia en la placa del panel.
NOTA
Advertencia para SRVO-372,373
3 Para el procedimiento de recuperacin de esta alarma, consultar la descripcin de
SRVO-230 o SRVO-231.
4 Si esta alarma es emitida, no reiniciar la alarma de error de cadena hasta que el fallo es
comprobado y corregido.
Si contina usando el robot con uno de los circuitos duplicados estando defectuoso, no se puede
garantizar seguridad en el momento que el otro circuito falla.
-1319-
APENDICE D
B-82284ES-3/01
SRVO-374 SERVO MODE11 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de cambio de modo.
(Solucin 1) Compruebe el cambio de modo y su cable. Sustityalos si se detecta un defecto.
(Solucin 2) Sustituya la placa del panel.
SRVO-375 SERVO MODE12 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de cambio de modo.
(Solucin 1) Compruebe el cambio de modo y su cable. Sustityalos si se detecta un defecto.
(Solucin 2) Sustituya la placa del panel.
SRVO-376 SERVO MODE21 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de cambio de modo.
(Solucin 1) Compruebe el cambio de modo y su cable. Sustityalos si se detecta un defecto.
(Solucin 2) Sustituya la placa del panel.
SRVO-377 SERVO MODE22 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de cambio de modo.
(Solucin 1) Compruebe el cambio de modo y su cable. Sustityalos si se detecta un defecto.
(Solucin 2) Sustituya la placa del panel.
NOTA
Advertencia para SRVO-374~377
5 Para el procedimiento de recuperacin de esta alarma, consultar la descripcin de
SRVO-230 o SRVO-231.
6 Si esta alarma es emitida, no reiniciar la alarma de error de cadena hasta que el fallo es
comprobado y corregido. Si contina usando el robot con uno de los circuitos duplicados estando
defectuoso, no se puede garantizar seguridad en el momento que el otro circuito falla.
SRVO-378 SERVO OPSFTY11 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
SRVO-379 SERVO OPSFTY12 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
-1320-
APENDICE D
B-82284ES-3/01
SRVO-380 SERVO OPSFTY21 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
SRVO-381 SERVO OPSFTY22 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
SRVO-382 SERVO OPSFTY31 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
SRVO-383 SERVO OPSFTY32 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
SRVO-384 SERVO OPSFTY41 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
-1321-
APENDICE D
B-82284ES-3/01
SRVO-385 SERVO OPSFTY42 status abnormal
(Causa)
Se ha detectado una alarma de cadena con la seal de OPSFTY .
(Solucin 1) Comprobar si la circuitrera conectada a la seal de entrada dual (OPSFTY) est
defectuosa.
(Solucin 2) Comprobar si la temporizacin de la seal de entrada dual (OPSFTY) responde
satisfactoriamente a la especificacin de temporizacin.
(Solucin 3) Sustituya la placa del panel.
NOTA
Advertencia para SRVO-378~385
7 Para el procedimiento de recuperacin de esta alarma, consultar la descripcin de
SRVO-230 o SRVO-231.
8 Si esta alarma es emitida, no reiniciar la alarma de error de cadena hasta que el fallo es
comprobado y corregido. Si contina usando el robot con uno de los circuitos duplicados estando
defectuoso, no se puede garantizar seguridad en el momento que el otro circuito falla.
-1322-
APENDICE D
B-82284ES-3/01
D.2.2 Cdigos de error SYST (ID=24)
SYST-001 PAUSE.G HOLD button is being pressed
(Causa)
Ha intentado realizar una operacin con el botn hold (entrada) pulsado.
(Solucin) LIbere el botn hold (input) e intente la misma operacin.
SYST-002 PAUSE.G HOLD is locked by program
(Causa)
La condicin que est reteniend el robot est bloqueda por el programa y no se puede
eliminar. Si se ejecuta una orden de HOLD en un programa KAREL, la condicin
retenida slo se puede eliminar mediante el mismo programa, utilizando la orden de
UNHOLD o saliendo del programa. Si intenta hacer un movimiento en tal condicin,
aparecer el siguiente mensaje.
(Solucin) Espere hasta que el programa KAREL ejecute la accin de UNHOLD o salga del
programa.
SYST-003 WARN TP is enabled
(Causa)
El comando no se ha podidio ejecutar porque la consola de programacin (TP) est
activada.
(Solucin) Desactive la consola de programacin e intntelo de nuevo.
SYST-004 WARN SOP is enabled
(Causa)
La orden no se ha podido ejecutar porque el panel del operador del sistema (SOP) est
activado.
(Solucin) Site el interruptor REMOTE del SOP en la posicin de REMOTE e intntelo de nuevo.
SYST-005 WARN UOP is the master device
(Causa)
La orden no se ha podido ejecutar porque el panel del usuario del sistema (SUP) est
activado.
(Solucin) Site el interruptor REMOTE en local (si la orden se realiza desde el SOP), o configure
correctamente la variable $RMT_MASTER del sistema.
SYST-006 WARN CRT is the master device
(Causa)
La orden no se ha podido ejecutar porque la CRT es un dispositivo maestro.
(Solucin 1) Para realizar la orden desde el panel del operador, site el interruptor REMOTE en la
posicin de local.
(Solucin 2) Para ejecutar la orden desde la unidad remota, configure el valor de $RMT_MASTER
de manera adecuada.
-1323-
APENDICE D
B-82284ES-3/01
SYST-007 WARN NETWORK is the master device
(Causa)
La orden no se ha podido ejecutar porque el procesador de rdenes NETWORK es un
dispositivo maestro.
(Solucin 1) Para realizar la orden desde el panel del operador, site el interruptor REMOTE en la
posicin de local.
(Solucin 2) Para ejecutar la orden desde la unidad remota, configure el valor de $RMT_MASTER
de manera adecuada.
SYST-008 WARN Nothing is the master device
(Causa)
La variable $RMT_MASTER del sistema est configurada para desactivar todos los
dispositivos. Por lo tanto, los dispositivos remotos no pueden ejecutar ningn
movimiento.
(Solucin 1) Para realizar la orden desde el panel del operador, site el interruptor REMOTE en la
posicin de local.
(Solucin 2) Para ejecutar la orden desde la unidad remota, configure el valor de $RMT_MASTER
de manera adecuada.
SYST-009 WARN Safety Fence open
(Causa)
El comando no se ha podidio ejecutar porque la consola de la valla de seguridad est
abierta.
(Solucin) Cierre la valla de seguridad e intntelo de nuevo.
SYST-010 WARN Max num task reached
(Causa)
El nmero de tareas ha sobrepasado el mximo permitido.
(Solucin) Salga de una de las tareas.
SYST-011 WARN Failed to run task
(Causa)
El programa no ha conseguido ejecutar el programa.
(Solucin) Averige la cause de la alarma en la pantalla de causa de la alarma. Solucione el
problema.
SYST-012 WARN Not in remote
(Causa)
No se est en condicin remota.
(Solucin) Site el interruptor REMOTE en on.
SYST-013 WARN Invalid program number
(Causa)
El nmero de PNS no est dentro de los lmites permitidos.
(Solucin) Indique un nmero de programa entre 1 y 9999.
-1324-
APENDICE D
B-82284ES-3/01
SYST-014 WARN Program select failed
(Causa)
La orden de PNS no se ha ejecutado con xito.
(Solucin) Averige la cause de la alarma en la pantalla de causa de la alarma. Solucione el
problema.
SYST-015 WARN Robot Service Request failed
(Causa)
La orden de RSR no se ha ejecutado con xito.
(Solucin) Averige la cause de la alarma en la pantalla de causa de la alarma. Solucione el
problema.
SYST-016 WARN ENBL signal is off
(Causa)
La seal de ENBL del panel del operador usuario est desactivada.
(Solucin) Site la seal de ENBL en ON.
SYST-017 WARN Single step operation effective
(Causa)
Est activada la funcin de paso a paso.
(Solucin) Apague el interruptor de paso a paso.
SYST-018 WARN Continuing from different line
(Causa)
Ha intentado continuar con la ejecucin del programa desde una lnea diferente a la de
la lnea pausada.
(Solucin) Elija YES o NO en mensaje visualizado en en la consola de programacin.
SYST-019 WARN Program not selected
(Causa)
No se ha seleccionado ningn programa.
(Solucin) Elija un programa del men de seleccin de programa de la consola de programacin o
mediante el PNS.
SYST-020 WARN Program not verified by PNS
(Causa)
El programa elegido con PNS es diferente al programa elegido primeramente.
(Solucin) Seleccione un programa vlido desde el men de seleccin de programa de la consola
de programacin
SYST-021 WARN System not ready, press RESET
(Causa)
El arranque de programa est desabilitado porque la verificacin del programa no se ha
realizado con xito.
(Solucin) Pulse RESET para eliminar la condicin del error.
-1325-
APENDICE D
B-82284ES-3/01
SYST-022 WARN PNS not zero, cannot continue
(Causa)
No se puede continuar con un programa pausado si los puertos de entrada de PNS no
estn a cero.
(Solucin) Intrduzca una seal de borrado de error para configurar todas las entrada PNS a 0 y
despus de la seal de arranque.
SYST-023 SYSTEM Teach Pendant communication error
(Causa)
Se ha daado un cable de comunicacin.
(Solucin) Compruebe el cable de comunicacin. Sustityalo si es necesario.
SYST-024 WARN PNSTROBE is OFF. No se puede ejecutar el arranque.
(Causa)
No se ha podido procesar el Prod_start porque el PNSTROBE est desactivado.
(Solucin) Active la entrada PNSTROBE.
SYST-025 WARN Teach Pendant is different type
(Causa)
El tipo de consola de programacin que se est conectando es diferente al de la que
estaba conectada.
(Solucin) Conecte una consola de programacin del mismo tipo que la que haba conectada.
SYST-026 System normal power up
(Causa)
El sistema ha ejecutado un arranque normal.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
SYST-027 PAUSE.G HOT start failed (Error:%d)
(Causa)
El arranque en caliente no se ha ejecutado con xito por alguna de las siguientes razones:
1. Se ha producido un fallo en el suministro de energa durante el arranque.
2.Se ha cambiado el mdulo Flash ROM.
3. Se ha producido un error en el tiempo de ejecucin.
4. Ha habido un error interno del sistema 1.
5. Ha habido un error interno del sistema 2.
(Solucin) El arranque en fro se selecciona automaticamente.
SYST-028 WARN (%s) Program timed out
(Causa)
El sistema ha finalizado el programa $PWR_HOT, $PWR_SEMI por un exceso de
tiempo (40seg).
(Solucin) Disminuya el tamao del programa para que se pueda ejecutar dentro del lmite de
tiempo.
-1326-
APENDICE D
B-82284ES-3/01
SYST-029 PAUSE.G Robot was connected (Group:%d)
(Causa)
La tecla de conexin/aislamiento ha sido situada en conexin
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
SYST-030 PAUSE.G Robot was isolated (Group:%d)
(Causa)
La tecla de conexin/aislamiento ha sido situada en aislamiento.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
SYST-031 SYSTEM F-ROM parity
(Causa)
Se ha detectado un error de paridad en la memoria FROM del sistema.
(Solucin) Vuelva a cargar el software del sistema.
SYST-032 WARN ENBL signal from UOP is lost
(Causa)
Se ha perdido la seal de entrada ENBL del panel del operador usuario.
(Solucin) Reestablezca la seal de entrada.
SYST-033 WARN SFSPD signal from UOP is lost
(Causa)
Se ha perdido la seal de entrada SFSPD del panel del operador usuario.
(Solucin) Reestablezca la seal de entrada.
SYST-034 WARN HOLD signal from SOP/UOP is lost
(Causa)
Se ha perdido la seal de entrada HOLD del panel operador del usuario o del panel
operador del sistema.
(Solucin) Reestablezca la seal de entrada.
SYST-035 WARN Low or No Battery Power in PSU.
(Causa)
El nivel de batera del panel PSU es bajo.
(Solucin) Cambie la batera por una nueva que sea del mismo tipo.
SYST-036 WARN Semi power failure recovery
(Causa)
El sistema ha efectuado un arranque en semicaliente.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
SYST-037 ABORT.G CE Sign key switch broken
(Causa)
Entrada defectuosa desde el interruptor CE Sign.
(Solucin) Repare el interruptor de CE Sign.
SYST-038 PAUSE.G Operation mode T1 Selected
(Causa)
Se ha seleccionado el modo de funcionamiento T1.
-1327-
APENDICE D
B-82284ES-3/01
SYST-039 PAUSE.G Operation mode T2 Selected
(Causa)
Se ha seleccionado el modo de funcionamiento T2.
SYST-040 PAUSE.G Operation mode AUTO Selected
(Causa)
Se ha seleccionado el modo de funcionamiento AUTO.
SYST-041 Ovrd Select could not ENABLED
(Causa)
El ndice DI no es vlido.
(Solucin) Configure el ndice DI.
SYST-042 DEADMAN defeated
(Causa)
Se ha cambiado el interruptor de modo de T1 o T2 a AUTO y el DEADMAN estaba
pulsado. El DEADMAN no puede estar pulsado cuando se cambia al modo AUTO.
(Solucin) Libere el DEADMAN y pulse RESET.
SYST-043 TP disabled in T1/T2 mode
(Causa)
El selector de modo est en T1 o T2 y el interruptor TP ON/OFF est en la posicin
OFF.
(Solucin) Site el interruptor TP ON/OFF en ON. Pulse RESET.
SYST-044 (Abnormal) TP disabled in T1/T2 mode
(Causa)
El selector de modo est en T1 o T2, el interruptor TP ON/OFF est en la posicin OFF
y el SVON est en ON. Esta es una condicin anormal.
(Solucin) Contacte con su representante tcnico de FANUC.
SYST-045 TP enabled in AUTO mode
(Causa)
El selector de modo est en AUTO y el interruptor TP ON/OFF est en la posicin ON.
(Solucin) Site el interruptor TP ON/OFF en OFF.
Pulse RESET."
SYST-046 Control Reliable config mismatch
(Causa)
1. El hardware de control seguro est instalado pero no se ha ejecutado la funcin o 2.
La funcin de control seguro se ha ejecutado pero el hardware no est disponible.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
SYST-047 Continuing from distant position
(Causa)
Se est intentando seguir con el programa desde una posicin distante.
(Solucin) Elija ABORT o CONTINUE en el mensaje mostrado en la consola de programacin.
-1328-
APENDICE D
B-82284ES-3/01
SYST-048 NECALC couldn't get work memory
(Causa)
El sistema no ha encontrado memoria de trabajo para el softward de NUCALC.
Puede que la memoria sea insuficiente.
(Solucin) Aumente la memoria del controlador.
SYST-049 SFCALC couldn't get work memory
(Causa)
El sistema no ha encontrado memoria de trabajo para el softward de SFCALC.
Puede que la memoria sea insuficiente.
(Solucin) Aumente la memoria del controlador.
SYST-067 Panel HSSB disconnect
(Causa)
La conexin con el panel est desconectada.
(Solucin) Compruebe el cable del panel HSSB.
SYST-095 Remote diagnose internal error
(Causa)
Se ha producido un error interno en la funcin de diagnstico remoto.
(Solucin) Error interno
SYST-096 Designated task is not valid
(Causa)
La tarea especificada por el PC en diagnstico remoto no es vlida.
(Solucin) Compruebe el funcionamiento del software de diagnstico remoto del PC.
SYST-097 Fail to initialize Modem
(Causa)
El mdem no se ha abierto correctamente.
(Solucin) Compruebe que hay un mdem instalado.
Compruebe la configuracin del tipo de mdem.
SYST-098 Card Modem is removed
(Causa)
Se ha desconectado la tarjeta del mdem durante la comunicacin.
(Solucin) Reintroduzca la tarjeta y reincie la funcin de diagnosis remota.
Compruebe que la tarjeta del mdem est introducida correctamente en la entrada
PCMIA.
SYST-099 Card Modem is not responded
(Causa)
La tarjeta del mdem no responde.
(Solucin) Compruebe que el mdem est conectado correctamente.
Compruebe la tarjeta del mdem.
SYST-100 DSR in Modem OFF
(Causa)
La DSR se ha apagado durante la comunicacin.
(Solucin) Compruebe la conexin entre el Robot y el mdem.
Si est utilizando una tarjeta de mdem, compreube que no est daada y que est
conectada correctamente.
SYST-101 Connection is stopped
(Causa)
Se ha perdido la lnea.
(Solucin) Compruebe la lnea telefnica.
-1329-
APENDICE D
B-82284ES-3/01
SYST-144 Bad DO specfied by %s
(Causa)
La variable del sistema ha encontrado un DO no vlido o no asignado.
(Solucin) Cambie el valor de la variable del sistema a 0 (para no utilizarla) o a un nmero vlido.
Compruebe que se ha localizado un determinado DO.
SYST-148 Dynamic Brake is Disabled
(Causa)
Se ha activado la seal DI[$DYN_BRK.$DI_IDX] de peticin de liberacin del freno
dinmico de manera que ste ha sido liberado.
(Solucin) Mientras la seal de peticin de liberacin del freno dinmico est activa se generar un
IMSTP.
SYST-149 Dynamic Brake is Enabled
(Causa)
Se ha desactivado la seal de peticin de liberacin del freno dinmico de manera que
ste se ha accionado.
(Solucin) Este mensaje no es una alarma.
SYST-150 Cursor is not on line 1
(Causa)
Se ha iniciado el programa por una lnea que no es la primera.
(Solucin) Elija YES/NO segn la pregunta que se le muestra en pantalla.
Seguidamente reinicie el programa.
SYST-151 Start again (%s, %d)
(Causa)
Tras el inicio del programa en una lnea diferente a la primera, se ha elejido YES en
relacin a la pregunta aparecida en pantalla.
(Solucin) Reinicie el programa.
SYST-152 Cannot force DO's in AUTO mode
(Causa)
Se ha intentado enviar una seal en el modo AUTO.
(Solucin) Antes de realizar esta operacin, salga del modo AUTO.
SYST-153 Cannot SIM/UNSIM DO's in AUTO mode
(Causa)
Se ha intentado simular un envo de seal en el modo AUTO.
(Solucin) Antes de realizar esta operacin, salga del modo AUTO.
SYST-156 Unknown hard ware
(Causa)
El PCB no se corresponde con la unidad de control.
(Solucin) Cambie el PCB por otro que sea correcto.
SYST-157 CE/RIA software does not exist
(Causa)
No est instalada la opcin CE/RIA.
(Solucin) Instale la opcin de CE/RIA.
SYST-158 Robot cannot move in T2 mode
(Causa)
El interruptor trimodo est en el modo T2.
El robot no se puede mover en el modo T2.
(Solucin) Cambie el interruptor al modo T1 o al modo AUTO.
-1330-
APENDICE D
B-82284ES-3/01
D.2.3 Cdigos de error INTP (ID=12)
INTP-000 ABORT.G.G Req has not been processed yet
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-001 PAUSE.G Cannot lock the motion grp
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-002 ABORT.G Program manager internal error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-003 ABORT.G Invalid request
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-004 PAUSE.G Cannot ATTACH with TP enabled
(Causa)
Para la instruccin ATTACH es necesario desactivar la consola de programacin.
(Solucin) Desactvie la consola de programacin.
INTP-005 PAUSE.G Cannot release motion control
(Causa)
No se puede liberar el control de movimiento.
(Solucin) Aborte el program en ejecucin o interrumpido.
INTP-100 to 102 ABORT.L (%s^4, %d^5) Internal error (PXnn)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-103 ABORT.L (%s^4, %d^5) Program error
(Causa)
Se produjo un error mientras el programa estaba en ejecucin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-104 ABORT.L (%s^4, %d^5) Single step failed
(Causa)
No se puede ejecutar el modo de un solo paso
(Solucin) Consulte el cdigo de causas de errores.
INTP-105 ABORT.L (%s^4, %d^5) Run request failed
(Causa)
No se puede inicar el programa.
(Solucin) Consulte el cdigo de causas de errores.
INTP-106 PAUSE.L (%s^4, %d^5) Continue request failed
(Causa)
No se puede reanudar el programa.
(Solucin) Consulte el cdigo de causas de errores.
-1331-
APENDICE D
B-82284ES-3/01
INTP-107 ABORT.L (%s^4, %d^5) Pause request failed
(Causa)
Se produjo un error mientras se ejecutaba el programa.
(Solucin) Consulte el cdigo de causas de errores.
INTP-108 ABORT.L (%s^4, %d^5) Abort request failed
(Causa)
Se produjo un error al abortar la ejecucin del programa.
(Solucin) Consulte el cdigo de causas de errores.
INTP-109 WARN (%s^4, %d^5) BWD motion request failed
(Causa)
No se puede ejecutar el desplazamiento hacia atrs.
(Solucin) Consulte el cdigo de causas de errores.
INTP-110 (%s^4, %d^5) Get task status request failed
(Causa)
No se encuentra el atributo de la tarea indicado o su lectura no est accesible.
(Solucin) Compruebe el atributo.
INTP-111 WARN (%s^4, %d^5) Skip statement request failed
(Causa)
La lnea que est actualmente en ejecucin no se puede cambiar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-112 PAUSE.L Cannot call interrupt routine
(Causa)
No se puede ejecutar la rutina de interrupcin.
(Solucin) Consulte el cdigo de causas de errores.
(Causa)
Si se produce esta alarma junto con la alarma "MEMO-004 WARN SPECIFIED
PROGRAM IS IN USE", se cumplen las condiciones del programa de condicin y el
programa de accin deseado se edita, ejecuta o suspende.
(Solucin) Seleccione otro programa de la lista de programas.
Finalice el programa de accin actual.
(Causa)
Si se muestra esta alarma junto con la alarma "PROG-020 TASK IS ALREADY
ABORTED", es posible que el programa que ejecut la instruccin de inicio de
seguimiento ya haya finalizado cuando se cumplen las condiciones del programa de
condicin.
(Solucin) Cuando est activado el seguimiento del programa, un programa de accin slo puede
ejecutarse si el programa que ejecut la instruccin de inicio de seguimiento est en
ejecucin.
INTP-113 PAUSE.L (%s^4, %d^5) Stop motion request failed
(Causa)
Se produjo un error al interrumpir el movimiento.
(Solucin) Consulte el cdigo de causas de errores.
INTP-114 PAUSE.L (%s^4, %d^5) Cancel motion request failed
(Causa)
Se produjo un error al cancelar el movimiento.
(Solucin) Consulte el cdigo de causas de errores.
INTP-115 PAUSE.L (%s^4, %d^5) Resume motion request failed
(Causa)
Se produjo un error al reanudar el movimiento.
(Solucin) Consulte el cdigo de causas de errores.
-1332-
APENDICE D
B-82284ES-3/01
INTP-116 PAUSE.L (%s^4, %d^5) Hold motion request failed
(Causa)
Se produjo un error al retener el movimiento.
(Solucin) Consulte el cdigo de causas de errores.
INTP-117 PAUSE.L (%s^4, %d^5) Unhold motion request failed
(Causa)
Se produjo un error al no retener el movimiento.
(Solucin) Consulte el cdigo de causas de errores.
INTP-118 to 123 PAUSE.L (%s^4, %d^5) System error
(Causa)
Error interno de software.
(Solucin) Consulte el cdigo de causas de errores.
INTP-124 ABORT.L (%s^4, %d^5) Invalid ITR routine
(Causa)
Error interno de software
(Solucin) Consulte el cdigo de causas de errores.
INTP-125 ABORT.L Failed to convert position
(Causa)
Se ha producido un fallo en la conversin de un tipo de posicin a otro.
(Solucin) Consulte el cdigo de causas de errores.
INTP-126 ABORT.L Vision built-in return failed
(Causa)
No se ha recuperado la visin incorporada.
(Solucin) Consulte el cdigo de causas de errores.
INTP-127 WARN Power fail detected
(Causa)
Se ha detectado un fallo en la potencia.
(Solucin) Reanude el programa tras completar el arranque en caliente.
INTP-128 PAUSE.L Pos reg is locked
(Causa)
El registro de posicin est cerrado.
(Solucin) Espere un momento. El error debera resolverse por s mismo.
INTP-129 ABORT.L Cannot use motion group
(Causa)
Ha intentado cerrar el grupo de movimiento a pesar de que este programa no puede usar
grupos de movimiento.
(Solucin) Elimine la mscara de grupo de la pantalla de datos del programa.
INTP-130 ABORT.L (%s^4, %d^5) Exec status recovery failed
(Causa)
No se ha recuperado el estado de ejecucin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-131 ABORT.L Number of stop exceeds limit
(Causa)
Se crean demasiados datos de paro a la vez.
(Solucin) Reduzca el nmero de datos de paro.
-1333-
APENDICE D
B-82284ES-3/01
INTP-132 Unlocked groups specified
(Causa)
Los grupos de movimiento indicados ya se han abierto.
(Solucin) Cambie la indicacin de grupo de movimiento.
INTP-133 Motion is already released
(Causa)
Algunos grupos de movimiento indicados ya se han abierto.
(Solucin) Cambie la indicacin de grupo de movimiento. Cierre el grupo de movimiento.
INTP-134 Over automatic start Max counter
(Causa)
El arranque automtico se ejecut las veces definidas, pero la alarma no se instal.
(Solucin) Ajustar la alarma manualmente.
INTP-135 Recovery DO OFF in auto start mode
(Causa)
El DO de recuperacin de error est desactivado en la prestacin de arranque
automtico
Por lo tanto, el programa de reanudacin no se puede ejecutar automticamente.
(Solucin) Compruebe la condicin del estado del DO de recuperacin de error
INTP-136 Can not use motion group for dry run function
(Causa)
En $PAUSE_PROG and $RESUME_PROG se indica un programa que usa un grupo de
movimiento.
(Solucin) Indique un programa sin indicar un grupo de movimiento.
INTP-137 Program specified by $PAUSE_PROG doesn't exist.
(Causa)
$PAUSE_PROG no incluye un programa especfico.
(Solucin) Compruebe $PAUSE_PROG.
INTP-138 Program specified by $RESM_DRYPROG doesn't exist.
(Causa)
$RESUME_PROG no incluye un programa especfico.
(Solucin) Compruebe $RESUME_PROG.
INTP-139 (%s^4, %d^5) Local variable request failed
(Causa)
Se ha producido un fallo en la ejecucin.
(Solucin) En la pantalla de historial de alarmas, compruebe si se muestra alguna otra alarma.
INTP-200 PAUSE.L (%s^4, %d^5) Unimplemented TP instruction
(Causa)
No se puede emplear esta instruccin.
(Solucin) Asegrese de que se carga la opcin adecuada.
INTP-201 PAUSE.L (%s^4, %d^5) Untaught element encountered
(Causa)
Una parte del programa no tiene datos de programacin.
El programa de condicin indicado contiene un error (instruccin sin datos de
programacin).
(Solucin) Programe la instruccin.
-1334-
APENDICE D
B-82284ES-3/01
INTP-202 PAUSE.L (%s^4, %d^5) Syntax error
(Causa)
Error de sintaxis de instruccin.
(Solucin) Vuelva a programar la instruccin.
INTP-203 PAUSE.L (%s^4, %d^5) Variable type mismatch
(Causa)
El tipo de variable no es correcto.
(Solucin) Compruebe el tipo de variable.
INTP-204 PAUSE.L (%s^4, %d^5) Invalid value for index
(Causa)
El valor del ndice no es vlido.
(Solucin) Compruebe el valor del ndice.
INTP-205 PAUSE.L (%s^4, %d^5) Analog port access error
(Causa)
La E/S analgica no funciona correctamente.
(Solucin) Consulte el cdigo de causas de errores.
INTP-206 PAUSE.L (%s^4, %d^5) Digital port access error
(Causa)
La E/S digital no funciona correctamente.
(Solucin) Consulte el cdigo de causas de errores.
INTP-207 PAUSE.L (%s^4, %d^5) Group I/O port access error
(Causa)
La E/S de grupo no funciona correctamente.
(Solucin) Consulte el cdigo de causas de errores.
INTP-208 PAUSE.L (%s^4, %d^5) Divide by 0
(Causa)
Se ha ejecutado la divisin por 0.
(Solucin) Compruebe el valor.
INTP-209 PAUSE.L (%s^4, %d^5) SELECT is needed
(Causa)
Se ha ejecutado una instruccin de caso antes de una instruccin de seleccin.
(Solucin) Aada una instruccin de seleccin antes de la instruccin de caso.
INTP-212 PAUSE.L (%s^4, %d^5) Invalid value for OVERRIDE
(Causa)
El valor indicado no puede usarse para la instruccin OVERRIDE (exceso).
(Solucin) Compruebe el valor.
INTP-213 PAUSE.L %s^7 (%s^4, %d^5) UALM[%d^9]
(Causa)
Se ha producido una alarma de usuario.
(Solucin) Consulte el cdigo de alarmas del usuario.
INTP-214 PAUSE.L (%s^4, %d^5) Specified group not locked
(Causa)
Las instrucciones de configuracin del registro de posicin o la trama se han ejecutado
en un programa sin grupo de movimiento.
(Solucin) Configure el grupo de movimiento en la pantalla DETAIL del programa.
Consulte el cdigo de alarmas del usuario.
-1335-
APENDICE D
B-82284ES-3/01
INTP-215 PAUSE.L (%s^4, %d^5) Group mismatch
(Causa)
Los datos de posicin no son vlidos.
(Solucin) Compruebe los datos de posicin.
INTP-216 PAUSE.L (%s^4, %d^5) Invalid value for group number
(Causa)
El valor indicado no es vlido par el nmero de grupo de movimiento.
(Solucin) Compruebe el valor.
INTP-217 PAUSE.L (%s^4, %d^5) SKIP CONDITION needed
(Causa)
Se ha ejecutado una instruccin SKIP (omisin) antes de una instruccin de condicin
de omisin.
(Solucin) Aada una instruccin de condicin de omisin.
INTP-218 PAUSE.L (%s^4, %d^5) Skip failed
(Causa)
No se puede ejecutar la isntruccin de omisin o la instruccin de condicin de omisin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-219 ABORT.L (%s^4, %d^5) Pause task failed
(Causa)
No se puede ejecutar la instruccin de pausa.
(Solucin) Consulte el cdigo de causas de errores.
INTP-220 ABORT.L (%s^4, %d^5) Abort task failed
(Causa)
No se puede ejecutar la instruccin de abortar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-221 PAUSE.L (%s^4, %d^5) Application failed
(Causa)
No se puede ejecutar la instruccin de aplicacin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-222 PAUSE.L (%s^4, %d^5) Call program failed
(Causa)
No se puede ejecutar la instruccin de llamada de programa.
(Solucin) Consulte el cdigo de causas de errores.
INTP-223 PAUSE.L (%s^4, %d^5) Delay time failed
(Causa)
No se puede ejecutar la instruccin de espera.
(Solucin) Consulte el cdigo de causas de errores.
INTP-224 PAUSE.L (%s^4, %d^5) Jump label failed
(Causa)
No se puede ejecutar la instruccin de derivacin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-225 PAUSE.L (%s^4, %d^5) Motion statement failed
(Causa)
No se puede ejecutar la instruccin de movimiento.
(Solucin) Consulte el cdigo de causas de errores.
-1336-
APENDICE D
B-82284ES-3/01
INTP-226 PAUSE.L (%s^4, %d^5) Read position register failed
(Causa)
No se puede leer el registro de posicin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-227 PAUSE.L (%s^4, %d^5) Write position register failed
(Causa)
No se puede escribir el registro de posicin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-228 PAUSE.L (%s^4, %d^5) Read register failed
(Causa)
No se puede leer el registro.
(Solucin) Consulte el cdigo de causas de errores.
INTP-229 PAUSE.L (%s^4, %d^5) Write register failed
(Causa)
No se puede escribir el registro.
(Solucin) Consulte el cdigo de causas de errores.
INTP-230 PAUSE.L (%s^4, %d^5) Wait condition failed
(Causa)
No se puede ejecutar la instruccin de espera de condicin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-231 PAUSE.L (%s^4, %d^5) Read next line failed
(Causa)
No se puede leer la lnea siguiente.
(Solucin) Consulte el cdigo de causas de errores.
INTP-232 PAUSE.L (%s^4, %d^5) Invalid frame number
(Causa)
El nmero de trama no es vlido.
(Solucin) Compruebe el nmero de trama.
INTP-233 PAUSE.L (%s^4, %d^5) Read frame value failed
(Causa)
No se puede leer la trama indicada.
(Solucin) Consulte el cdigo de causas de errores.
INTP-234 PAUSE.L (%s^4, %d^5) Write frame value failed
(Causa)
No se puede escribir la trama indicada.
(Solucin) Solucin:Consulte el cdigo de causas de errores.
INTP-235 PAUSE.L (%s^4, %d^5) Read pos item failed
(Causa)
No se puede la variable de posicin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-236 PAUSE.L (%s^4, %d^5) Write pos item failed
(Causa)
No se puede escribir la variable de posicin.
(Solucin) Consulte el cdigo de causas de errores.
-1337-
APENDICE D
B-82284ES-3/01
INTP-237 WARN (%s^4, %d^5) No more motion for BWD
(Causa)
No se puede ampliar el desplazamiento hacia atrs porque la lnea de programa actual
est en primera posicin.
(Solucin) Detenga el desplazamiento hacia atrs en este punto.
INTP-238 WARN (%s^4, %d^5) BWD execution completed
(Causa)
Se ha completado la ejecucin hacia atrs.
(Solucin) No emplee la ejecucin hacia atrs a partir de este punto.
INTP-239 WARN (%s^4, %d^5) Cannot execute backwards
(Causa)
Esta instruccin no se puede ejecutar hacia atrs.
(Solucin) Disponga el cursor para ejecutar en la siguiente lnea.
INTP-240 PAUSE.L (%s^4, %d^5) Incompatible data type
(Causa)
El tipo de datos indicado en la instruccin PARAMETER (parmetro) no es vlido para
el tipo de parmetro.
(Solucin) Compruebe el tipo de datos.
INTP-241 PAUSE.L (%s^4, %d^5) Unsupported parameter
(Causa)
No se puede usar este tipo de parmetro.
(Solucin) Compruebe el tipo de parmetro.
INTP-242 PAUSE.L (%s^4, %d^5) Offset value is needed
(Causa)
Se ha ejecutado una instruccin OFFSET (desviacin) antes de una instruccin de
instruccin de desviacin. No se ha programado un registro de posicin en la instruccin
de desviacin.
(Solucin) Aada una instruccin de condicin de desviacin antes de la instruccin de desviacin.
Programe un registro de posicin.
INTP-243 ABORT.G (%s^4, %d^5) Def grp is not specified
(Causa)
Este programa no tiene grupo de movimiento definido.
No se puede ejecutar la instruccin de movimiento.
(Solucin) Elimine la instruccin de movimiento o configure el grupo de movimento en la pantalla
DETAIL del programa.
INTP-244 PAUSE.L (%s^4, %d^5) Invalid line number
(Causa)
El nmero de lnea de entrada es incorrecto.
(Solucin) Compruebe el nmero de lnea.
INTP-245 PAUSE.L (%s^4, %d^5) RCV stmt failed
(Causa)
No se puede ejecutar la instruccin RECEIVE R[ ].
(Solucin) Consulte el cdigo de causas de errores.
INTP-246 PAUSE.L (%s^4, %d^5) SEMAPHORE stmt failed
(Causa)
No se puede ejecutar la instruccin SEMAPHORE.
(Solucin) Consulte el cdigo de causas de errores.
-1338-
APENDICE D
B-82284ES-3/01
INTP-247 PAUSE.L (%s^4, %d^5) Pre exec failed
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-248 PAUSE.L (%s^4, %d^5) MACRO failed
(Causa)
No se puede ejecutar la macroinstruccin.
(Solucin) Consulte el cdigo de causas de errores.
INTP-249 PAUSE.L Macro is not set correctly
(Causa)
La configuracin de la MACRO era invlida.
(Solucin) Compruebe la configuracin de la MACRO.
INTP-250 PAUSE.L (%s^4, %d^5) Invalid uframe number
(Causa)
El nmero de trama de usuario no es vlido.
(Solucin) Consulte el cdigo de causas de errores.
INTP-251 PAUSE.L (%s^4, %d^5) Invalid utool number
(Causa)
El nmero de trama de la herramienta no es vlido.
(Solucin) Consulte el cdigo de causas de errores.
INTP-252 PAUSE.L User frame number mismatch
(Causa)
El nmero de trama del usuario de los datos de posicin no coincide con el nmero de
trama del usuario seleccionado actualmente.
(Solucin) Compruebe el nmero de trama del usuario.
INTP-253 PAUSE.L Tool frame number mismatch
(Causa)
El nmero de trama de la herramienta de los datos de posicin no coincide con el
nmero de trama de la herramienta seleccionado actualmente.
(Solucin) Compruebe el nmero de trama de la herramienta.
INTP-254 PAUSE.L (%s^4, %d^5) Parameter not found
(Causa)
No se puede encontrar el nombre de parmetro indicado.
(Solucin) Compruebe el nombre del parmetro.
INTP-255 PAUSE.L (%s^4, %d^5) CAL_MATRIX failed
(Causa)
No se puede ejecutar la instruccin CAL_MATRIX.
(Solucin) Consulte el cdigo de causas de errores.
INTP-256 PAUSE.L (%s^4, %d^5) No data for CAL_MATRIX
(Causa)
Los 3 puntos de origen o los 3 puntos de destino no estn programados.
(Solucin) Programe los 3 puntos de origen o los 3 puntos de destino.
INTP-257 PAUSE.L (%s^4, %d^5) Invalid delay time
(Causa)
El valor del tiempo de espera es negativo o superior al valor mximo de 2147483.647
seg.
(Solucin) Introduzca un valor correcto.
-1339-
APENDICE D
B-82284ES-3/01
INTP-258 PAUSE.L (%s^4, %d^5) Weld port access error
(Causa)
La soldadura no funciona correctamente.
(Solucin) Consulte el cdigo de causas de errores.
INTP-259 PAUSE.L (%s^4, %d^5) Invalid position type
(Causa)
El tipo de datos del registro de posicin se program usando el tipo articular.
(Solucin) Cambie los datos del registro de posicin a Cartesianos.
INTP-260 PAUSE.L (%s^4, %d^5) Invalid torque limit value
(Causa)
El lmite de par indicado no est entre 0,0 y 100,0.
(Solucin) Indique un lmite de par que est entre 0,0 y 100,0.
INTP-261 PAUSE.L (%s^4, %d^5) Array subscript missing
(Causa)
No hay nmero de elemento matriz indicado.
(Solucin) Indique un nmero de elemento matriz.
INTP-262 PAUSE.L (%s^4, %d^5) Field name missing
(Causa)No hay nombre de elemento indicado.
(Solucin) Indique un nombre de elemento.
INTP-263 PAUSE.L (%s^4, %d^5) Invalid register type
(Causa)
El tipo de registro no es vlido.
(Solucin) Compruebe el tipo de registro.
INTP-265 PAUSE.L (%s^4, %d^5) Invalid value for speed value
(Causa)
El valor indicado no puede usarse para la instruccin AF.
(Solucin) Indique un valor que est entre 0 y 100.
INTP-266 ABORT.L (%s^4, %d^5) Mnemonic in interrupt is failed
(Causa)
Se ha producido un fallo en la ejecucin de las instrucciones mnemotcnicas en el
programa de interrupcin KAREL.
(Solucin) Inserte una instruccin CANCEL o STOP antes de llamar una rutina de interrupcin.
INTP-267 PAUSE.L (%s^4, %d^5) RUN stmt failed
(Causa)
El programa indicado ya est en ejecucin.
(Solucin) Aborte el programa indicado.
INTP-268 PAUSE.L (%s^4, %d^5) This statement only one in each line
(Causa)
Una sola lnea tiene ms contenido que una instruccin de aplicacin.
Slo puede haber una de estas instrucciones por lnea.
(Solucin) Elimine la instruccin sobrante.
INTP-269 PAUSE.L (%s^4, %d^5) Skip statement only one in each line
(Causa)
Una sola lnea tiene ms contenido que una instruccin de omisin.
Slo puede haber una instruccin de omisin por lnea.
(Solucin) Elimine la instruccin de omisin sobrante.
-1340-
APENDICE D
B-82284ES-3/01
INTP-270 PAUSE.L (%s^4, %d^5) different group cannot BWD
(Causa)
Durante la ejecucin hacia atrs, surge un movimiento con un nmero de grupo
diferente de la anterior instruccin de movimiento.
(Solucin) Emplee la ejecucin FWD con precaucin.
INTP-271 WARN (%s^4, %d^5) Excessive torque limit value
(Causa)
El valor del lmite del par se modific para superar su valor mximo.
El valor lmite del par se ha estabilizado en el lmite del par superior.
(Solucin) Indique un valor de lmite del par inferior o igual al valor mximo.
INTP-272 PAUSE.L (%s^4, %d^5) Unsupported operator
(Causa)
Este operador no es compatible.
(Solucin) Compruebe el operador.
INTP-274 (%s^4, %d^5) CH program error
(Causa)
Esta instruccin del seguidor no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
Use MENU para visualizar la pantalla Alarm Log (Registro de alarmas).
(Causa)
Si esta alarma se muestra junto con la alarma "MEMO-004 WARN SPECIFIED
PROGRAM IN USE", el programa de condicin indicado se est editando actualmente.
(Solucin) Seleccione otro programa de la lista de programas.
(Causa)
Si esta alarma se muestra junto con la alarma "INTP-275 PAUSE.L INVALID SUB
TYPE OF CH PROGRAM", es posible que el subtipo delprograma de condicin
indicado no sea CH, o que dicho programa no exista.
INTP-275 Invalid sub type of CH program
(Causa)
Els subtipo del programa ch indicado no se puede usar.
(Solucin) Compruebe el subtipo de este programa CH.
INTP-276 (%s^4, %d^5) Invalid combination of motion option
(Causa)
Las instrucciones de opcin de movimiento (isntruccin SKIP, TIME BEFORE/
AFTER y de aplicacin) no se pueden programar conjuntamente.
(Solucin) Elimine la instruccin de opcin de movimiento
INTP-277 (%s^4, %d^5) Internal MACRO EPT data mismatch
(Causa)
El ndice EPT de la tabla macro no indica el nombre de programa definido en la tabla
macro.
Es decir, el ndice EPT de la tabla macro es incorrecto.
(Solucin) Indique el ndice EPT correcto para el nombre de programa definido en la tabla macro.
INTP-278 %s^7
(Causa)
Se produce la alarma del seguidor DI para la funcin de autorrecuperacin de error.
(Solucin) Esto es una alarma de usuario definido.
-1341-
APENDICE D
B-82284ES-3/01
INTP-279 (%s^4, %d^5) Application instruction mismatch
(Causa)
Se ha ejecutado la instruccin de aplicacin. Sin embargo, esta instruccin de aplicacin
no coincide con los datos del proceso de aplicacin de este programa.
(Solucin) Cambie el proceso de aplicacin de este programa de modo que tenga la aplicacin
adecuada para esta instruccin de aplicacin.
INTP-280 (%s^4, %d^5) Application data mismatch
(Causa)
Los datos de aplicacin del programa llamado son diferentes de los del programa
original
(Solucin) Cambie la estructura del programa.
INTP0-281 No application data
(Causa)
Este programa no dispone de los datos de aplicacin.
(Solucin) Defina los datos de aplicacin en la pantalla de datos del programa.
INTP-282 (%s^4, %d^5) Fast fault status mismatch
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-283 (%s^4, %d^5) Stack over flow for fast fault recovery
(Causa)
Acumulacin de flujo para grabar los ltimos datos de jerarquizacin de recuperacin
por defecto
(Solucin) Reduzca la jerarquizacin del programa
INTP-284 No detection of fast fault recovery
(Causa)
No se puede detectar el punto para la recuperacin por defecto rpida
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
INTP-285 Karel program cannot entry in fast fautl recovery
(Causa)
No se puede efectuar la entrada rpida en el programa karel.
(Solucin) Use el programa de la consola de programacin.
El programa INTP-286 MAINT no est definido en la recuperacin por defecto rpida
(Causa)
El programa MAINT no est definido en la recuperacin por defecto rpida.
(Solucin) Configurar el programa MAINT.
INTP-287 Fail to execute MAINT program
(Causa)
No se ha ejecutado el programa MAINT
(Solucin) Confirme que el nombre del programa MAINT es correcto o que el programa MAINT
existe actualmente.
INTP-288 (%s^4, %d^5) Parameter does not exist
(Causa)
El parmetro designado mediante el registro AR no existe.
(Solucin) Confirme el ndice del registro AR y el parmetro en el comando CALL/MACRO del
programa principal.
-1342-
APENDICE D
B-82284ES-3/01
INTP-289 Can't save ffast point at program change
(Causa)
Al activar la recuperacin rpida, el programa se interrumpi en la parte del cambio de
programa
(Solucin) Compruebe si existe la finalizacin CONT al final del subprograma.
Si existe, configrelo en FINE.
Es el lmite de la funcin de recuperacin rpida por defecto.
INTP-290 Fast fault recovery position is not saved
(Causa)
Durante la secuencia de recuperacin por defecto rpida, se produce cualquier alarma.
Por lo tanto, la posicin de recuperacin por defecto rpida no se guarda.
INTP-291 (%s^4, %d^5) Index for AR is not correct
(Causa)
El nmero de registro AR es incorrecto. En estos momentos no se muestra esta alarma.
(Solucin) Compruebe el ndice del registro AR y el argumento indicado el la macroinstruccin o
instruccin de llamada del programa principal.
INTP-292 more than 6 motion with DB executed
(Causa)
Se solapan seis o ms movimientos de ejecucin avanzada (distancia).
(Solucin) Modifique la programacin de modo que no se solapen seis o ms movimientos de
ejecucin avanzada (distancia).
INTP-293 (%s,%d)DB too small(away)(%dmm)
(Causa)
No se cumple la condicin para la ejecucin avanzada (distancia).
(Solucin) Aumente el valor de distancia indicado.
INTP-294 TPE parameter error
(Causa)
Se ha indicado un argumento incorrecto para la macroinstruccin o la instruccin de
llamada.
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
INTP-295 (%s,%d)DB too small(away)(%dmm)
(Causa)
No se cumple la condicin para la ejecucin avanzada (distancia).
(Solucin) Aumente el valor de distancia indicado.
INTP-296 (%s,%d) $SCR_GRP[%d].$M_POS_ENB is FALSE
(Causa)
La ejecucin avanzada (distancia) no funciona cuando $SCR_GRP[ ].$M_POS_ENB
es FALSE.
(Solucin) Cambie $SCR_GRP[].$M_POS_ENB a TRUE.
INTP-297 (%s,%d)DB too small(done)(%dmm)
(Causa)
Una instruccin de movimiento acab antes de que se cumpliera la condicin para la
ejecucin avanzada (distancia)
(Solucin) Aumente el valor de distancia indicado.
INTP-300 ABORT.L (%s^4, %d^5) Unimplemented P-code
(Causa)
Error de programa KAREL. Esta instruccin KAREL no se puede ejecutar.
(Solucin) Consulte la versin de software de traductor de KAREL.
-1343-
APENDICE D
B-82284ES-3/01
INTP-301 ABORT.L (%s^4, %d^5) Stack underflow
(Causa)
Error de programa KAREL.
Ejecucin introducida en una va de derivacin FOR con una instruccin GOTO.
(Solucin) No se puede usar una instruccin GOTO par entrar o salir de una va de derivacin FOR.
Compruebe la etiqueta de la instruccin GOTO.
INTP-302 ABORT.L (%s^4, %d^5) Stack overflow
(Causa)
1. Se ha ejecutado una instruccin de programa repetidamente sin lmite.
2. Se llaman demasiados programas a la vez.
(Solucin) 1. Antes de ejecutar una instruccin repetitiva, progrmela de forma que se pueda
eliminar una llamada a la instruccin en cualquier momento de la ejecucin.
2. Reduzca el nmero de programas a llamar de una vez.
En los programas KAREL, se puede aumentar la acumulacin.
INTP-303 ABORT.L (%s^4, %d^5) Specified value exceeds limit
(Causa)
Error de programa KAREL. El valor indicado supera el lmite mximo.
(Solucin) Compruebe el valor.
INTP-304 ABORT.L (%s^4, %d^5) Array length mismatch
(Causa)
Error de programa KAREL. Las dimensiones de las matrices no coinciden.
(Solucin) Compruebe las dimensiones de las matrices.
INTP-305 ABORT.L (%s^4, %d^5) Error related condition handler
(Causa)
Error de programa KAREL. Se ha producido un error de manipulacin de condiciones.
(Solucin) Consulte el cdigo de causas de errores.
INTP-306 ABORT.L (%s^4, %d^5) Attach request failed
(Causa)
Error de programa KAREL. Se ha producido un fallo en la instruccin ATTACH.
(Solucin) Consulte el cdigo de causas de errores.
INTP-307 ABORT.L (%s^4, %d^5) Detach request failed
(Causa)
Error de programa KAREL. Se ha producido un fallo en la instruccin DETACH.
(Solucin) Consulte el cdigo de causas de errores.
INTP-308 ABORT.L (%s^4, %d^5) No case match is encountered
(Causa)
Error de programa KAREL.
La instruccin CASE no coincide con ninguna derivacin.
(Solucin) Compruebe el valor de CASE y las derivaciones.
INTP-309 ABORT.L (%s^4, %d^5) Undefined WITHCH parameter
(Causa)
Error de programa KAREL.
El parmetro indicado no se puede usar con la clusula del accionador de la condicin.
(Solucin) Compruebe el parmetro.
INTP-310 ABORT.L (%s^4, %d^5) Invalid subscript for array
(Causa)
Error de programa KAREL. El ndice de la matriz no es vlido.
(Solucin) Compruebe la longitud de la matriz y el valor del ndice.
-1344-
APENDICE D
B-82284ES-3/01
INTP-311 PAUSE.L (%s^4, %d^5) Uninitialized data is used
(Causa)
Error de programa KAREL. Se han sido datos no programados o no iniciados.
(Solucin) Antes de usar los datos, progrmelos o inicialcelos.
INTP-312 ABORT.L (%s^4, %d^5) Invalid joint number
(Causa)
Error de programa KAREL. Se ha empleado un nmero de eje incorrecto.
(Solucin) Compruebe el nmero de eje y el valor de los datos.
INTP-313 ABORT.L (%s^4, %d^5) Motion statement failed
(Causa)
Error de programa KAREL. La instruccin MOTION no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-314 ABORT.L (%s^4, %d^5) Return program failed
(Causa)
Error de programa KAREL. No se puede recuperar la ejecucin desde la rutina.
(Solucin) Consulte el cdigo de causas de errores.
INTP-315 ABORT.L (%s^4, %d^5) Built-in execution failed
(Causa)
Error de programa KAREL. Se ha producido un error de rutina incorporada.
(Solucin) Consulte el cdigo de causas de errores.
INTP-316 ABORT.L (%s^4, %d^5) Call program failed
(Causa)
Error de programa KAREL. No se puede llamar la rutina.
(Solucin) Compruebe que la rutina est cargada consultando el cdigo de causas de error.
INTP-317 ABORT.L (%s^4, %d^5) Invalid condition specified
(Causa)
Error de programa KAREL. La condicin indicada no era vlida.
(Solucin) Compruebe la condicin.
INTP-318 ABORT.L (%s^4, %d^5) Invalid action specified
(Causa)
Error de programa KAREL. La accin indicada no era vlida.
(Solucin) Compruebe la accin.
INTP-319 ABORT.L (%s^4, %d^5) Invalid type code
(Causa)
Error de programa KAREL. El tipo de datos no era vlido.
(Solucin) Compruebe el tipo de datos.
INTP-320 ABORT.L (%s^4, %d^5) Undefined built-in
(Causa)
Error de programa KAREL. La rutina incorporada no est definida.
(Solucin) Compruebe que la opcin apropiada est cargada.
INTP-321 ABORT.L (%s^4, %d^5) END stmt of a func rtn
(Causa)
Error de programa KAREL. La instruccin END se he ejecutado en una rutina de
funcin en vez de una instruccin RETURN.
(Solucin) Aada una instruccin RETURN a la rutina de funcin.
-1345-
APENDICE D
B-82284ES-3/01
INTP-322 ABORT.L (%s^4, %d^5) Invalid arg val for builtin
(Causa)
Error de programa KAREL.
El valor de argumento de una rutina incorporada era incorrecto.
(Solucin) Compruebe el valor del argumento.
INTP-323 ABORT.L (%s^4, %d^5) Value overflow
(Causa)
Error de programa KAREL.
El valor de los datos para la variable era demasiado elevado.
(Solucin) Compruebe el tipo de variable y el valor de los datos.
INTP-324 ABORT.L (%s^4, %d^5) Invalid open mode string
(Causa)
Error de programa KAREL.
La secuencia de uso de la instruccin OPEN FILE no era vlida.
(Solucin) Compruebe la secuencia de uso en la instruccin OPEN FILE.
INTP-325 ABORT.L (%s^4, %d^5) Invalid file string
(Causa)
Error de programa KAREL.
La secuencia de archivo de la instruccin OPEN FILE no era vlida.
(Solucin) Compruebe la secuencia de archivo.
INTP-326 ABORT.L (%s^4, %d^5) File var is already used
(Causa)
Error de programa KAREL. La variable FILE ya est en uso.
(Solucin) Cierre el archivo antes de volver a usar la variable FILE o aada una nueva variable
FILE.
INTP-327 ABORT.L (%s^4, %d^5) Open file failed
(Causa)
Error de programa KAREL. No se ha podido abrir el archivo.
(Solucin) Consulte el cdigo de causas de errores.
INTP-328 ABORT.L (%s^4, %d^5) File is not opened
(Causa)
Error de programa KAREL. El archivo indicado no se ha abierto antes de la operacin.
(Solucin) Abra el archivo antes de la operacin.
INTP-329 ABORT.L (%s^4, %d^5) Write variable failed
(Causa)
Error de programa AREL.
(Solucin) Consulte el cdigo de causas de errores.
INTP-330 ABORT.L (%s^4, %d^5) Write file failed
(Causa)
Error de programa KAREL. Se ha producido un error en la escritura del archivo.
(Solucin) Consulte el cdigo de causas de errores.
INTP-331 ABORT.L (%s^4, %d^5) Read variable failed
(Causa)
Error de programa KAREL. Se ha producido un error en la lectura de la variable.
(Solucin) Consulte el cdigo de causas de errores.
-1346-
APENDICE D
B-82284ES-3/01
INTP-332 ABORT.L (%s^4, %d^5) Read data is too short
(Causa)
Error de programa KAREL. Los datos ledos del archivo son demasiado breves.
(Solucin) Asegrese de que los datos del archivo sean vlidos.
INTP-333 ABORT.L (%s^4, %d^5) Invalid ASCII string for read
(Causa)
Error de programa KAREL. La secuencia del archivo leda no es correcta.
(Solucin) Compruebe los datos del archivo.
INTP-334 ABORT.L (%s^4, %d^5) Read file failed
(Causa)
Error de programa KAREL. Se ha producido un error en la lectura del archivo.
(Solucin) Consulte el cdigo de causas de errores.
INTP-335 ABORT.L (%s^4, %d^5) Cannot open pre-defined file
(Causa)
Error de programa KAREL. No se puede abrir un archivo predefinido por el sistema.
(Solucin) Use el archivo definido por el sistema sin abrirlo.
INTP-336 ABORT.L (%s^4, %d^5) Cannot close pre-defined file
(Causa)
Error de programa KAREL. No se puede cerrar un archivo predefinido por el sistema.
(Solucin) No intente cerrarlo.
INTP-337 ABORT.L (%s^4, %d^5) Invalid routine type
(Causa)
Error de programa KAREL. No se puede emplear esta rutina.
(Solucin) Asegrese de tener el tipo y nombre de rutina correctos.
INTP-338 ABORT.L (%s^4, %d^5) Close file failed
(Causa)
Error de programa KAREL. Se ha producido un error al cerrar el archivo.
(Solucin) Consulte el cdigo de causas de errores.
INTP-339 ABORT.L (%s^4, %d^5) Invalid program name
(Causa)
Error de programa KAREL. El nombre del programa no es vlido.
(Solucin) Asegrese de tener el nombre de programa correcto.
INTP-340 ABORT.L (%s^4, %d^5) Invalid variable name
(Causa)
Error de programa KAREL. El nombre de la variable no es vlido.
(Solucin) Asegrese de tener el nombre de variable correcto.
INTP-341 ABORT.L (%s^4, %d^5) Variable not found
(Causa)
Error de programa KAREL. No se encuentra la variable.
(Solucin) Compruebe el nombre del programa y el nombre de la variable.
INTP-342 ABORT.L (%s^4, %d^5) Incompatible variable
(Causa)
Error de programa KAREL.
El tipo de datos definido mediante la funcin BYNAME y el tipo de variable no
coinciden.
(Solucin) Asegrese de tener el tipo de datos y variable correctos.
-1347-
APENDICE D
B-82284ES-3/01
INTP-343 ABORT.L (%s^4, %d^5) Reference stack overflow
(Causa)
Error de programa KAREL. Se pasan demsiadas variables con la funcin BYNAME.
(Solucin) Reduzca el nmero de funciones BYNAME.
INTP-344 ABORT.L (%s^4, %d^5) Readahead buffer overflow
(Causa)
Error de programa KAREL.
Se ha sobrecargado el circuito intermedio para leer fuera del dispositivo.
(Solucin) Aumente el tamao del circuito intermedio.
INTP-345 ABORT.L (%s^4, %d^5) Pause task failed
(Causa)
Error de programa KAREL. La instruccin PAUSE no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-346 ABORT.L (%s^4, %d^5) Abort task failed
(Causa)
Error de programa KAREL. La instruccin ABORT no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-347 ABORT.L (%s^4, %d^5) Read I/O value failed
(Causa)
Error de programa KAREL. No se puede introducir la seal de entrada digital.
(Solucin) Consulte el cdigo de causas de errores.
INTP-348 ABORT.L (%s^4, %d^5) Write I/O value failed
(Causa)
Error de programa KAREL. No se puede mostrar la seal de salida digital.
(Solucin) Consulte el cdigo de causas de errores.
INTP-349 ABORT.L (%s^4, %d^5) Hold motion failed
(Causa)
Error de programa KAREL. La instruccin HOLD no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-350 ABORT.L (%s^4, %d^5) Unhold motion failed
(Causa)
Error de programa KAREL. La instruccin UNHOLD no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-351 ABORT.L (%s^4, %d^5) Stop motion failed
(Causa)
Error de programa KAREL. La instruccin STOP no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-352 ABORT.L (%s^4, %d^5) Cancel motion failed
(Causa)
Error de programa KAREL. La instruccin CANCEL no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-353 ABORT.L (%s^4, %d^5) Resume motion failed
(Causa)
Error de programa KAREL. La instruccin RESUME no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
-1348-
APENDICE D
B-82284ES-3/01
INTP-354 ABORT.L (%s^4, %d^5) Break point failed
(Causa)
Error de programa KAREL. La funcin de punto de ruptura no se puede ejecutar.
(Solucin) Consulte el cdigo de causas de errores.
INTP-355 ABORT.L (%s^4, %d^5) AMR is not found
(Causa)
Error de programa KAREL.
No se ha encontrado el AMR manejado mediante la rutina incorporada
RETURN_AMR.
(Solucin) Compruebe el funcionamiento del programa.
INTP-356 ABORT.L (%s^4, %d^5) AMR is not processed yet
(Causa)
Error de programa KAREL.
La rutina incorporada RETURN_AMR no se puede usar para un AMR no ejecutado.
(Solucin) Ejecute el AMR mediante la rutina incorporada WAIT_AMR.
INTP-357 ABORT.L (%s^4, %d^5) WAIT_AMR is cancelled
(Causa)
Error de programa KAREL.
Se ha cancelado la ejecucin de la rutina incorporada WAIT_AMR.
(Solucin) Debe reiniciar el programa que ejecuta la WAIT_AMR.
INTP-358 ABORT.L (%s^4, %d^5) Timeout at read request
(Causa)
Error de programa KAREL. La instruccin READ ha excedido su tiempo.
(Solucin) Compruebe el dispositivo que se est leyendo.
INTP-359 ABORT.L (%s^4, %d^5) Read request is nested
(Causa)
Error de programa KAREL. Se ha ejecutado otra instruccin READ mientras se
esperaba la introduccin de una instruccin READ.
(Solucin) Elimine las lecturas categorizadas.
INTP-360 ABORT.L (%s^4, %d^5) Vector is 0
(Causa)
Error de programa KAREL. El valor del vector no era vlido.
(Solucin) Compruebe el valor del vector.
INTP-361 PAUSE.L (%s^4, %d^5) FRAME:P2 is same as P1
(Causa)
Error de programa KAREL. La orientacin del eje X no se puede calcular en la rutina
incorporada de la trama, porque P1 y P2 son el mismo punto.
(Solucin) Programe P1 y P2 como puntos diferentes.
INTP-362 PAUSE.L (%s^4, %d^5) FRAME:P3 is same as P1
(Causa)
Error de programa KAREL. El plano X-Y no se puede calcular en la rutina incorporada
de la trama, porque P1 y P3 son el mismo punto.
(Solucin) Programe P1 y P3 como puntos diferentes.
INTP-363 PAUSE.L (%s^4, %d^5) FRAME:P3 exists on line P2-P1
(Causa)
Error de programa KAREL. El plano X-Y no se puede calcular en la rutina incorporada
de la trama, porque P3 est situado en la orientacin del eje X.
(Solucin) Programe P3 fuera de la orientacin del eje X.
-1349-
APENDICE D
B-82284ES-3/01
INTP-364 ABORT.L (%s^4, %d^5) String too short for data
(Causa)
Error de programa KAREL. La secuencia de destino es demasiado breve.
(Solucin) Aumente el tamao de la secuencia de destino.
INTP-365 ABORT.L (%s^4, %d^5) Predefined window not opened
(Causa)
Error de programa KAREL. No se abre un archivo predefinido por el sistema.
(Solucin) Compruebe el uso de este archivo.
INTP-366 ABORT.L (%s^4, %d^5) I/O status is not cleared
(Causa)
Error de programa KAREL. Se ha producido un error en la ltima operacin de archivo.
(Solucin) Reinicie el error con la rutina incorporada CLR_IO_STAT.
INTP-367 ABORT.L (%s^4, %d^5) Bad base in format
(Causa)
Error de programa KAREL. El modo E/S slo funciona de binario a hexadecimal.
(Solucin) Compruebe el modo indicado.
INTP-368 PAUSE.L (%s^4, %d^5) Cannot use specified program
(Causa)
Error de programa KAREL. No se puede emplear el programa indicado.
(Solucin) Consulte el cdigo de causas de errores.
INTP-369 ABORT.L (%s^4, %d^5) Timeout at WAIT_AMR
(Causa)
Error de programa KAREL.
La rutina incorporada WAIT_AMR se ha excedido en el tiempo.
(Solucin) Si esperaba un AMR dentro de la lgica de comprobacin del valor de temporizacin
en la tarea que el AMR debera haber enviado.
INTP-370 ABORT.L (%s^4, %d^5) Vision CPU not plugged in
(Causa)
Error de programa KAREL. El panel de visin CPU no est enchufado.
(Solucin) Enchufe el panel de visin CPU.
INTP-371 ABORT.L (%s^4, %d^5) Vision built-in overflow
(Causa)
Error de programa KAREL.
La operacin se ha sobrecargado en la rutina incorporada de visin.
(Solucin) Modifique el programa de manera que se ejecuten menos rutinas incorporadas de visin
a la vez.
-1350-
APENDICE D
B-82284ES-3/01
INTP-372 ABORT.L (%s^4, %d^5) Undefined vision built-in
(Causa)
Error de programa KAREL. La rutina incorporada de visin no est definida.
(Solucin) Compruebe que la opcin apropiada est cargada.
INTP-373 ABORT.L (%s^4, %d^5) Undefined vision parameter type
(Causa)
Error de programa AREL. El parmetro de la rutina incorporada de visin es
(Solucin) Compruebe el parmetro de la rutina incorporada de visin.
INTP-374 ABORT.L (%s^4, %d^5) Undefined vision return type
(Causa)
Error de programa KAREL.
El valor de retorno de la rutina incorporada de visin no es vlido.
(Solucin) Compruebe el valor de retorno de la rutina incorporada de visin.
INTP-375 (%s^4, %d^5) System var passed using BYNAME
(Causa)
Esta alarma est relacionada con el programa KAREL.
Con funcin BYNAME no se puede usar ninguna variable del sistema.
Use Pass sin BYNAME, GET_VAR o SET_VAR.
INTP-376 ABORT.L (%s^4, %d^5) Motion in interrupt is failed
(Causa)
No hay ninguna instruccin CANCEL o STOP.
(Solucin) Inserte una instruccin CANCEL o STOP antes de llamar una rutina de interrupcin.
INTP-377 WARN (%s^4, %d^5) Local COND recovery failed
(Causa)
No se puede recuperar esta condicin local.
(Solucin) Consulte el cdigo de causas de errores.
INTP-378 WARN (%s^4, %d^5) Local variable is used
(Causa)
La variable local o el parmetro se usa para la condicin.
(Solucin) Use la variable global para recuperar la condicin local.
INTP-379 ABORT.L Bad condition handler number
(Causa)
Se h usado un nmero de accionador de condicin no vlido en una definicin de
accionador de condicin o con una instruccin o accin ENABLE (activar), DISABLE
(desactivar) o PURGE (despejar).
(Solucin) Corrija el nmero del accionador de condicin.
Los nmeros del accionador de condicin deben ser del 1 al 1000.
-1351-
APENDICE D
B-82284ES-3/01
INTP-380 ABORT.L Bad program number
(Causa)
Se ha indicado un nmero de programa no vlido.
(Solucin) Use un nmero de programa vlido.
Los nmeros del programa deben estar entre 1 y $SCR,$MAXNUMTASK + 2.
INTP-381 (%s^4, %d^5) Invalid Delay Time
(Causa)
Se ha indicado un tiempo de retardo invlido en la instruccin DELAY.
(Solucin) Use un tiempo de retardo vlido. El tiempo de retardo debe estar dentro de 0..86400000 .
INTP-382 (%s^4, %d^5) Invalid bit field value
(Causa)
Se ha indicado un valor invlido en el campo del bit
(Solucin) Use un valor vlido en el campo del bit.
INTP-383 (%s^4, %d^5) Path node out of range
(Causa)
El nudo de la trayectoria indicado est fuera del rango.
(Solucin) Compruebe el nudo de la trayectoria.
INTP-400 ABORT.L (%s^4, %d^5) Number of motions exceeded
(Causa)
Se ejecutan demasiados movimientos a la vez.
(Solucin) Reduzca el nmero de movimientos ejecutados a la vez. Ejecute el siguiente
movimiento tras completar el ltimo movimiento.
INTP-401 ABORT.L (%s^4, %d^5) Not On Top Of Stack
(Causa)
El movimiento pausado existe tras completar el movimiento.
(Solucin) Reanude el movimiento previamente interrumpido.
INTP-420 (%s^4, %d^5) OFIX is not available
(Causa)
No se puede emplear la instruccin de configuracin de posicin.
(Solucin) Compruebe el formato de movimiento y la instruccin de movimiento adicional.
INTP-421 (%s^4, %d^5) Stitch disable(S/S)
(Causa)
El modo de un solo paso est activado.
(Solucin) Cancele el modo de un solo paso.
INTP-422 (%s^4, %d^5) Stitch enable signal off
(Causa)
La seal de activacin de puntos est desactivada.
(Solucin) Active la seal de activacin de puntos.
-1352-
APENDICE D
B-82284ES-3/01
INTP-423 (%s^4, %d^5) Eq.condition signal error
(Causa)
La seal de condicin de equipo es incorrecta.
(Solucin) Compruebe la seal de condicin de equipo.
INTP-424 (%s^4, %d^5) Stitch speed error
(Causa)
El valor de velocidad de puntos es incorrecto.
(Solucin) Compruebe el valor de velocidad de puntos.
INTP-425 (%s^4, %d^5) Illegal motion type(J)
(Causa)
La funcin de puntos no se puede usar con el movimiento articular.
(Solucin) Cambie el movimiento lineal.
INTP-426 (%s^4, %d^5) Another prog is in stitching
(Causa)
Otro programa est usando la funcin de puntos.
(Solucin) Finalice el programa que est usando la funcin de puntos.
INTP-450 (%s^4, %d^5) Cannot call KAREL program
(Causa)
Se ha llamado el programa KAREL desde el programa esclavo principal/esclavo/nico
de la conexin del robot.
(Solucin) No llame el programa KAREL desde el programa esclavo principal/esclavo/nico.
INTP-451 (%s^4, %d^5) Cannot call Motion program
(Causa)
Se ha llamado un programa normal con un grupo de movimiento desde el programa
esclavo principal/esclavo/nico de la conexin del robot.
(Solucin) No llame un programa normal con un grupo de movimiento desde el programa esclavo
principal/esclavo/nico.
INTP-452 (%s^4, %d^5) Robot link type mismatch
(Causa)
Se ha llamado un programa de otro tipo desde el programa esclavo principal/esclavo/
nico de la conexin del robot.
(Solucin) No llame un programa de otro tipo desde el programa esclavo principal/esclavo/nico.
INTP-453 (%s^4, %d^5) Not in remote
(Causa)
El programa esclavo de la conexin del robot se puede ejecutar slo en modo remoto.
(Solucin) Asegrese de que se cumple la condicin remota.
-1353-
APENDICE D
B-82284ES-3/01
INTP-454 (%s^4, %d^5) Illegal return occurred
(Causa)
En la conexin del robot, el tipo de rutina principal es diferente del tipo de programa
llamado.
(Solucin) Haga coincidir el tipo de rutina principal con el tipo de programa llamado.
INTP-455 (%s^4, %d^5) Group mismatch(Link pattern)
(Causa)
El grupo de movimiento del programa principal de la conexin del robot no coincide
con el grupo de movimiento del robot principal indicado con la pauta de conexin.
(Solucin) Haga coincidir el grupo de movimiento del programa principal de la conexin del robot
con el grupo de movimiento del robot principal indicado con la pauta de conexin.
INTP-456 (%s^4, %d^5) Group mismatch(Slave group)
(Causa)
El grupo de movimiento del programa esclavo de la conexin del robot no coincide con
el grupo de movimiento del robot esclavo indicado con el grupo esclavo.
(Solucin) Haga coincidir el grupo de movimiento del programa esclavo de la conexin del robot
con el grupo de movimiento del robot esclavo indicado con el grupo esclavo.
INTP-457 (%s^4, %d^5) Master tool number mismatch
(Causa)
El nmero actualmente seleccionado del sistema de coordenadas de la herramienta por
el robot principal no coincide con el nmero de sistema de coordinadas de la
herramienta principal de los datos de conexin del robot en el programa esclavo.
(Solucin) Haga coincidir el nmero actualmente seleccionado del sistema de coordenadas de la
herramienta por el robot principal el nmero de sistema de coordenadas de la
herramienta principal de los datos de conexin del robot en el programa esclavo.
INTP-458 (%s^4, %d^5) Robot is still moving
(Causa)
Los robots se estn moviendo con la conexin del robot, as que el esclavo simple/
esclavo/principal no puede establecer sincronizacin.
(Solucin) Despus de que pare el robot, reiniciar el programa.
INTP-459 (%s^4, %d^5) Slave cannot JOINT motion
(Causa)
La instruccin de movimiento en el programa esclavo de la conexin del robot
especifica un movimiento articulado.
(Solucin) Cambiar la instruccin de movimiento del programa esclavo al movimiento ortogonal.
-1354-
APENDICE D
B-82284ES-3/01
INTP-460 (%s^4, %d^5) Cannot use JOINT pos for Slave
(Causa)
El formato de datos de posicin del programa esclavo de la conexin del robot es el
formato articular.
(Solucin) Cambiar el formato de los datos de posicin del programa esclavo al formato ortogonal.
INTP-461 (%s^4, %d^5) Master TP is enabled
(Causa)
El programa principal de la conexin del robot ha sido activado desde la consola de
programacin. El programa esclavo se detiene temporalmente.
(Solucin) El programa principal ha sido activado desde la consola de programacin, para que el
programa esclavo se detenga temporalmente.
INTP-462 (%s^4, %d^5) Cannot start Robot Link
(Causa)
La configuracin de la conexin del robot puede ser incorrecta.
(Solucin) Compruebe la configuracin.
INTP-463 (%s^4, %d^5) Motion group is Master
(Causa)
El grupo de movimiento de un programa cuya ejecucin fue intentada con la conexin
del robot es master.
(Solucin) Cancelar la configuracin del master, entonces reinicie el programa.
INTP-465 (%s^4, %d^5) Tracking error
(Causa)
La conexin del robot no pudo efectuar movimiento sincronizado.
(Solucin) Comprobar la configuracin de la conexin del robot.
INTP-466 (%s^4, %d^5) Robot link not calibrated
(Causa)
La conexin del robot no est calibrada.
(Solucin) Calibre la conexin del robot.
INTP-467 (%s^4, %d^5) Cannot use INC for Slave
(Causa)
En una instruccin de movimiento del programa esclavo de la conexin del robot, se
programa una instruccin de incremento.
(Solucin) La instruccin de incremento no puede ser usada en una instruccin de movimiento del
programa esclavo.
INTP-468 (%s^4, %d^5) Cannot use OFFSET for Slave
(Causa)
En una instruccin de movimiento del programa esclavo de la conexin del robot, se
programa una instruccin de compensacin.
(Solucin) La instruccin de compensacin no puede ser usada en una instruccin de movimiento
del programa esclavo.
-1355-
APENDICE D
B-82284ES-3/01
INTP-469 (%s^4, %d^5) BWD is failed for Master
(Causa)
Ha fallado un intento para la sincronizacin BWD del master de la conexin del robot.
(Solucin) Situar el esclavo en el estado de espera de sincronizacin.
INTP-470 (%s^4, %d^5) Not support BWD for Slav
(Causa)
La sincronizacin BWD no tiene apoyo para el programa esclavo de la conexin del
robot.
(Solucin) La sincronizacin BWD es apoyada para el programa esclavo.
INTP-471 (%s^4, %d^5) Robot is Master(Manual)
(Causa)
En la conexin del robot, el robot es situado en el estado (manual) del master.
(Solucin) En el estado (manual) del master, la activacin externa est desactivada.
Para la activacin externa, ajustar el estado (simple) del master en la pantalla de
operacin manual.
INTP-472 (%s^4, %d^5) Robot is Slave(Manual)
(Causa)
En la conexin del robot, el robot es situado en el estado (manual) esclavo.
(Solucin) En el estado (manual) esclavo, no se pueden ejecutar otros esclavos.
Mantener el programa, y cancelar el estado (manual) esclavo.
INTP-474 (%s^4, %d^5) Synchro ID mismatch
(Causa)
En la conexin del robot, se ejecuta un programa con un ID de movimiento sincronizado
diferente al ID de movimiento sincronizado del programa ejecutado en el momento.
(Solucin) Programas con diferentes ID de movimientos sincronizados no pueden ser ejecutados al
mismo tiempo.
INTP-475 (%s^4, %d^5) Cannot single step
(Causa)
El programa esclavo de la conexin del robot no se puede ejecutar en el modo de un solo
paso.
(Solucin) Cancele el modo de un solo paso.
INTP-476 (%s^4, %d^5) BWD is failed
(Causa)
En la conexin del robot, fall el BWD.
(Solucin) Se ha producido un fallo en el BWD.
INTP-477 (%s^4, %d^5) Cannot run Slave directly
(Causa)
El programa esclavo de la conexin del robot no puede ser activado directamente.
(Solucin) Ejecutar el esclavo llamando desde el programa normal.
-1356-
APENDICE D
B-82284ES-3/01
INTP-478 This group can not be MASTER
(Causa)
Se emite esta alarma cuando se hace un intento de especificar como master un robot no
configurado como master en la conexin del robot o cuando se hace un intento de
especificar como master un grupo no configurado como master en la pantalla de
operacin manual.
(Solucin) Especificar otro grupo como master, o modificar la configuracin.
INTP-479 Bad Hostname or Address(MASTER)
(Causa)
Se ha producido un intento de ejecutar la conexin del robot cuando un nombre de host
no registrado es especificado o la configuracin de una direccin IP es incorrecta en la
pantalla de comunicacin del host o la pantalla de configuracin de master.
(Solucin) Comprobar el master en la configuracin de la conexin del robot y la configuracin de
la comunicacin del host.
INTP-480 Bad Hostname or Address(SLAVE)
(Causa)
Se ha producido un intento de ejecutar la conexin del robot cuando un nombre de host
no registrado es especificado o la configuracin de una direccin IP es incorrecta en la
configuracin de comunicacin del host o la configuracin de la pauta de conexin.
(Solucin) Comprobar el esclavo en la configuracin de la conexin del robot y la configuracin
de la comunicacin del host.
INTP-481 Bad Synchronization ID
(Causa)
En la conexin del robot, es incorrecto un ID de movimiento sincronizado de programa
especificado.
(Solucin) Corregir el ID de movimiento sincronizado en la pantalla de datos.
INTP-482 Bad Link Pattern Number
(Causa)
En la conexin del robot, es incorrecto un nmero de pauta de conexin de programa
especificado.
(Solucin) Corregir el nmero de pauta de conexin en la pantalla de datos.
INTP-483 Bad Master Number
(Causa)
En la conexin del robot, es incorrecto un nmero de master de programa especificado.
(Solucin) Corregir el nmero de master en la pantalla de datos.
INTP-484 Bad Group number (MASTER)
(Causa)
Es incorrecto el nmero de grupo del master de la conexin del robot.
(Solucin) Comprobar el nmero de grupo del master.
-1357-
APENDICE D
B-82284ES-3/01
INTP-485 Bad Group number (SLAVE)
(Causa)
Es incorrecto el nmero de grupo del esclavo de la conexin del robot.
(Solucin) Comprobar el nmero de grupo del esclavo.
INTP-486 SLAVE is not calibrated
(Causa)
En la conexin del robot, hay un esclavo no calibrado.
(Solucin) Calibre el robot esclavo.
INTP-488 RLINK communication timeout
(Causa)
En la conexin del robot, la inicializacin de la comunicacin ha excedido el tiempo.
(Solucin) Aumente el valor de $RK_SYSCFG.$RMGR_PHTOUT 100.
INTP-489 Bad Hostname or Address, Group
(Causa)
Se ha producido un intento de ejecutar la conexin del robot cuando la configuracin de
un nombre de host, direccin IP, o grupo de movimiento es incorrecto en la
configuracin de comunicacin del host o la configuracin de la conexin del robot.
(Solucin) Comprobar la configuracin de la conexin del robot y la configuracin de la
comunicacin del host.
INTP-490 Timeout for link start
(Causa)
Se ha producido un intento de ejecutar la conexin del robot cuando la configuracin de
un nombre de host, direccin IP, o grupo de movimiento es incorrecto en la
configuracin de comunicacin del host o cuando el programa de conexin del robot no
es ejecutado en el destino de comunicacin. Por lo tanto, se ha excedido el tiempo de
inicio de sincronizacin.
(Solucin) Comprobar la configuracin de la conexin del robot y la configuracin de
comunicacin del host, y tambin comprobar el estado del robot en el destino de
comunicacin.
INTP-491 Linked robot or comm stopped
(Causa)
Durante la ejecucin de la conexin del robot, el robot en la comunicacin de la detenida
ejecucin del programa, o interrumpida comunicacin para una causa como fallo de
corriente.
(Solucin) Comprobar el estado del robot en el destino de comunicacin.
INTP-493 Slave program stopped
(Causa)
Durante la ejecucin del programa esclavo, se detiene el programa master en el destino
de comunicacin.
(Solucin) Comprobar el estado del robot en el destino de comunicacin.
INTP-493 Slave program stopped
(Causa)
Durante la ejecucin de la conexin del robot como master, se detiene el programa
esclavo en el destino de comunicacin.
(Solucin) Comprobar el estado del robot en el destino de comunicacin.
-1358-
APENDICE D
B-82284ES-3/01
D.2.4 Cdigos de error JOG (ID=19)
JOG-001 WARN Overtravel Violation
(Causa)
Se ha producido un sobredesplazamiento del robot.
(Solucin) Manteniendo pulsada la tecla shift, pulse el botn para eliminar la alarma y elimnela.
A continuacin, manteniendo pulsada la tecla shift, ejecute el movimiento por eje para
trasladar el eje de sobredesplazamiento al rango movible.
JOG-002 WARN Robot not Calibrated
(Causa)
No se ha calibrado el robot.
(Solucin) Aplicar uno de los siguientes mtodos para posicionamiento:
1. Realizar configuraciones de posicionamientos en la pantalla de posicionamiento.
2. Apagar y encender otra vez.
JOG-003 WARN No Motion Control
(Causa)
Hay otro programa con control de movimiento
(Solucin) Aborte el programa con control de movimiento pulsando la tecla FCTN y seleccionando
ABORT.
JOG-004 WARN Illegal linear jogging
(Causa)
No puede ejecutar ms de un movimiento rotacional a la vez.
(Solucin) Pulse slo una tecla de movimiento rotacional a la vez.
JOG-005 WARN Can not clear hold flag
(Causa)
La tecla o el botn hold est pulsado. O la seal *HOLD est desactivada.
(Solucin) Libere la tecla hold o el botn hold. O active la seal *HOLD.
JOG-006 WARN Subgroup does not exist
(Causa)
No hay ningn eje extendido en el grupo con el que hay que efectuar el movimiento.
(Solucin) No se necesita ninguna accin.
JOG-007 WARN Press SHIFT key to jog
(Causa)
La tecla SHIFT no est pulsada.
(Solucin) Mientras mueve el robot, pulse la tecla SHIFT. Libere la tecla JOG, mantenga pulsada
la tecla SHIFT y pulse la tecla JOG para efectuar el movimiento.
JOG-008 WARN Turn on TP to jog
(Causa)
La consola de programacin no est activada.
(Solucin) Mantenga el DEADMAN y conecte la consola de programacin antes de mover el
robot.
-1359-
APENDICE D
B-82284ES-3/01
JOG-009 WARN Hold deadman to jog
(Causa)
El interruptor DEADMAN no est pulsado.
(Solucin) Pulse el interruptor DEADMAN y a continuacin la tecla RESET para eliminar el error.
JOG-010 WARN Jog pressed before SHIFT
(Causa)
Se ha pulsado la tecla JOG antes de pulsar la tecla SHIFT.
(Solucin) Libere la tecla JOG. A continuacin, manteniendo pulsada la tecla SHIFT, pulse la tecla
JOG.
JOG-011 WARN Utool changed while jogging
(Causa)
La trama de herramienta seleccionada ha cambiado durante el movimiento.
(Solucin) Libere la tecla SHIFT y la tecla JOG. La nueva trama de la herramienta ser
automticamente efectiva.
JOG-012 WARN manual brake enabled
(Causa)
El freno manual est activado.
(Solucin) Accione todos los frenos pulsando el botn EMERGENCY STOP y pulse la tecla
RESET.
JOG-013 WARN Stroke limit (Group:%d Axis:%x Hex)
(Causa)
El eje del robot alcanza el lmite de colisiones indicado.
(Solucin) El robot ya alcanza el lmite de colisiones y ya no se puede mover en la direccin actual.
Extienda el lmite del eje si no supera las indicaciones del robot y del software.
JOG-014 WARN Vertical fixture position
(Causa)
El robot alcanza la posicin de instalacin vertical en el sistema LR-MATE.
(Solucin) Para proseguir el movimiento, libere la tecla JOG y vuelva a pulsarla.
JOG-015 WARN Horizontal fixture position
(Causa)
El robot alcanza la posicin de instalacin horizontal en el sistema LR-MATE.
(Solucin) Para proseguir el movimiento, libere la tecla JOG y vuelva a pulsarla.
JOG-016 SERVO Softfloat time out(Group:%d)
(Causa)
El tiempo de seguimiento finaliza cuando est activada la paleta flexible.
(Solucin) Ample la variable del sistema $SFLT_FUPTIM.
JOG-017 At R-Theta robot posture
(Causa)
En el movimiento remoto TCP, el robot ha adoptado la posicin R-Theta.
(Solucin) Para proseguir el movimiento, libere la tecla JOG y vuelva a pulsarla.
-1360-
APENDICE D
B-82284ES-3/01
JOG-020 Can not PATH JOG now
(Causa)
Se ha seleccionado PATH JOG, pero actualmente el robot no se encuentra en una
trayectoria programada, o la orientacin Z de la herramienta tiene la misma trayectoria
de programacin, por lo tanto no se puede determinar la orientacin de Y.
Can not PATH JOG
(Solucin) Use shift-FWD para ejecutar la trayectoria del programa o indique otra trama de
movimiento.
JOG-021 Multi key is pressed
(Causa)
En el PATH JOG no es compatible el uso de mltiples teclas de movimiento mltiples.
(Solucin) Pulse slo una tecla de movimiento a la vez.
JOG-022 Disabled in JOINT path
(Causa)
El movimiento PATH est desactivado en la trayectoria JOINT
(Solucin) El movimiento PATH est disponible en las trayectorias LINEAL y CIRCULAR
JOG-023 Available only in PAUSE
(Causa)
El movimiento PATH slo est disponible en el estado de PAUSA
(Solucin) El movimiento PATH slo est disponible en el estado de PAUSA
JOG-024 Currently this key is invalid
(Causa)
Actualmente esta tecla est desactivada.
(Solucin) Cambie el sistema de coordinadas de movimiento.
JOG-025 J4 is not zero
(Causa)
J4 no es la posicin 0.
(Solucin) Para emplear el movimiento con posicin fija, es necesario que J4 est en la posicin 0.
JOG-026 J4 is zero
(Causa)
Ahora J4 est en la posicin 0.
(Solucin) El movimiento con posicin fija est activado.
JOG-027 Reverse direction from J4=0
(Causa)
La direccin del movimiento es contraria a la direccin 0 de J4.
(Solucin) Pulse la tecla de movimiento para la direccin contraria.
JOG-028 Attitude fix mode limit (TCP)
(Causa)
Se ha alcanzado un lmite de movimiento lineal.
(Solucin) Cambie la posicin de destino o pase al movimiento articular. Se ha alcanzado un lmite
de colisiones en el modo TCP.
-1361-
APENDICE D
B-82284ES-3/01
JOG-029 OFIX jog error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
JOG-030 Can't jog as OFIX
(Causa)
El movimiento con posicin fija est desactivado. Se muestra una alarma adicional.
(Solucin) Compruebe la alarma adicional en la pantalla de historial de alarmas.
-1362-
APENDICE D
B-82284ES-3/01
D.2.5 Cdigos de error TPIF (ID=19)
TPIF-001 to 003 WARN Mnemonic editor error (%s^1)
(Causa)
Se ha producido una situacin no permitida en el software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
TPIF-004 WARN Memory write error
(Causa)
No se puede usar la instruccin porque la opcin de software correspondiente no est
incorporada.
(Solucin) Instale la opcin de software.
TPIF-005 WARN Program is not selected
(Causa)
No se ha seleccionado el programa al mostrar el programa en la pantalla de edicin.
(Solucin) Seleccione un programa en la pantalla SELECT.
TPIF-006 WARN SELECT is not taught
(Causa)
La instruccin programada necesitaba la instruccin SELECT antes de la lnea actual.
(Solucin) Programe la instruccin SELECT antes de la lnea actual.
TPIF-007 WARN Robot is not calibrated
(Causa)
Todava no ha finalizado el calibrado
(Solucin) Finalice el calibrado.
TPIF-008 WARN Memory protect violation
(Causa)
La proteccin contra escritura del programa est activada.
(Solucin) Libere la proteccin en la pantalla de seleccin.
TPIF-009 WARN Cancel delete by application
(Causa)
No se puede eliminar el programa porque la eliminacin de programa est desactivada
mediante el software de la herramienta de la aplicacin.
(Solucin) Active la eliminacin de programas en la pantalla de configuracin de aplicaciones.
TPIF-010 WARN Cancel enter by application
(Causa)
No se puede editar el programa porque la edicin de programa est desactivada
mediante el software de la herramienta de la aplicacin.
(Solucin) Active la edicin de programas en la pantalla de configuracin de aplicaciones.
TPIF-011 WARN Item is not found
(Causa)
No se encuentra el elemento por debajo de esta lnea
(Solucin) Pruebe con otro elemento o cierre la funcin de bsqueda
TPIF-012 WARN Kinematics solution is invalid
(Causa)
No se pueden traducir los datos de posicin
(Solucin) Compruebe la configuracin del robot y $MNUTOOL/$MNUFRAM de las variables
del sistema
-1363-
APENDICE D
B-82284ES-3/01
TPIF-013 WARN Other program is running
(Causa)
No se puede seleccionar el programa mientras el otro est en ejecucin o en pausa.
(Solucin) Seleccione el programa tras abortar el programa en ejecucin o en pausa.
TPIF-014 WARN Teach pendant is disabled
(Causa)
No se puede editar un programa cuando la consola de programacin est desactivada.
(Solucin) Edite el programa con la consola de programacin activada.
TPIF-015 WARN Bad position register index
(Causa)
El registro de posicin indicado no es vlido.
(Solucin) Compruebe el ndice del registro de posicin.
TPIF-016 to 017 WARN Memory access failed (%s^1)
(Causa)
Se ha producido una situacin no permitida en el software.
(Solucin 1) Vuelva a seleccionar un programa.
(Solucin 2) Pngase en contacto con FANUC Robotics.
TPIF-018 WARN Unspecified index value
(Causa)
El valor del ndice no es vlido.
(Solucin) Compruebe el valor del ndice indicado.
TPIF-019 WARN This item cannot be replaced
(Causa)
No se puede reemplazar este elemento.
(Solucin) Pruebe con otro elemento o cierre la funcin reemplazar
TPIF-020 NONE Mnaction search error
(Causa)
Se ha producido una situacin no permitida en el software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
TPIF-023 WARN WJNT and RTCP are not compatible
(Causa)
Wjnt y RTCP no son compatibles
(Solucin) Retire Wjnt o RTCP antes de aadir el otro
TPIF-030 WARN Program name is NULL
(Causa)
No se ha introducido el nombre del programa.
(Solucin) Introduzca el nombre del programa.
TPIF-031 WARN Remove num from top of Program name
(Causa)
Hay un nmero al principio del nombre del programa.
(Solucin) Elimine el nmero del nombre.
TPIF-032 WARN Remove space from Program name
(Causa)
Hay un espacio en el nombre del programa.
(Solucin) Elimine el espacio.
-1364-
APENDICE D
B-82284ES-3/01
TPIF-033 WARN Remove comma from Program name
(Causa)
Hay una coma en el nombre del programa.
(Solucin) Elimine la coma.
TPIF-034 WARN Remove dot from Program name
(Causa)
Hay un punto en el nombre del programa.
(Solucin) Elimine el punto.
TPIF-035 WARN Remove minus from Program name
(Causa)
Hay un signo menos en el nombre del programa.
(Solucin) Elimine el signo menos.
TPIF-036 WARN Memory is not enough
(Causa)
No hay suficiente memoria.
(Solucin) Elimine los programas que no emplee.
TPIF-037 WARN Program must be selected by TP
(Causa)
Slo el programa por defecto de la consola de programacin se puede editar en el CRT
(Solucin) Seleccione el programa de la consola de programacin antes de editar en el CRT
TPIF-038 WARN Invalid char in program name
(Causa)
Carcter invlido en el nombre del programa
(Solucin) Elimine el carcter invlido del nombre del programa
TPIF-040 WARN Label is already exist
(Causa)
Ya existe el mismo nmero de etiqueta.
(Solucin) Ponga otro nmero de etiqueta.
TPIF-041 WARN MNUTOOLNUM number is invalid
(Causa)
El nmero MNUTOOLNUM indicado no es vlido.
(Solucin) Compruebe el nmero de MNUTOOLNUM en las variables del SISTEMA.
TPIF-042 WARN MNUFRAMENUM number is invalid
(Causa)
El nmero MNUFRAMNUM indicado no es vlido.
(Solucin) Compruebe el nmero de MNUFRAMNUM en las variables del SISTEMA.
TPIF-043 WARN External change is valid
(Causa)
No se puede cambiar el robot (grupo) porque la funcin para seleccionar el robot
mediante DI externa es vlida.
(Solucin) Configure $MULTI_ROBO.CHANGE_SDI en las variables del SISTEMA en CERO.
TPIF-044 WARN Program is unsuitable for robot
(Causa)
La pantalla de grupo del programa es diferente del robot seleccionado (grupo).
(Solucin) Compruebe al seleccionar el robot (grupo) o compruebe la pantalla de grupo del atributo
del programa.
-1365-
APENDICE D
B-82284ES-3/01
TPIF-045 WARN Pallet number is over max
(Causa)
La instruccin de paletizar no puede programar ms de 16 en un programa.
(Solucin) Programe otro programa.
TPIF-046 WARN Motion option is over max
(Causa)
Demasiadas opciones de movimiento por defecto
(Solucin) Reduzca las opciones de movimiento de movimiento por defecto
TPIF-047 WARN Invalid program is selected
(Causa)
El tipo de programa es incorrecto.
(Solucin) Seleccione el programa TPE.
TPIF-048 WARN Running program is not found
(Causa)
El programa en ejecucin no existe.
TPIF-049 WARN Port number is invalid
(Causa)
El puerto no est configurado para el dispositivo externo.
(Solucin) Configure el puerto para el dispositivo externo.
TPIF-050 WARN Macro does not exist
(Causa)
No hay un programa asignado al comando macro.
(Solucin) Asigne un programa a este comando macro.
TPIF-051 WARN Program has been selected by PNS
(Causa)
Al seleccionar un programa mediante PNS, no puede seleccionar el programa en la
pantalla SELECT.
(Solucin) Desactive la seal de PNSTROBE.
TPIF-052 WARN FWD/BWD is disabled
(Causa)
Al seleccionar la funcin Disabled FWD, no puede ejecutar el programa mediante la
consola de programacin
(Solucin) Seleccione Disabled FWD en el men de funciones. Podr liberarlo desde la funcin
Disable FWD.
TPIF-053 WARN Not editing background program
(Causa)
No se ha seleccionado el programa mediante la edicin BACKGROUND
(Solucin) Seleccione el programa BACKGROUND en la pantalla SELECT.
TPIF-054 WARN Could not end editing
(Causa)
La memoria no es suficiente o el programa secundario no es vlido
(Solucin) Elimine los programas que no sirvan o confirme el programa secundario
TPIF-055 WARN Could not recovery original program
(Causa)
Se ha producido un fallo en la recuperacin del programa original seleccionado por el
BACKGROUND
(Solucin) Finalice la edicin con END_EDIT de [EDCMD] de nuevo antes de ejecutar el
programa original seleccionado mediante BACKGROUND
-1366-
APENDICE D
B-82284ES-3/01
TPIF-056 WARN This program is used by the CRT
(Causa)
No se puede seleccionar el programa de BACKGROUND mediante el CRT y la TP al
mismo tiempo
(Solucin) Finalice la edicin con END_EDIT de [EDCMD] en el CRT
TPIF-057 WARN This program is used by the TP
(Causa)
No se puede seleccionar el programa de BACKGROUND mediante el CRT y la TP al
mismo tiempo
(Solucin) Finalice la edicin con END_EDIT de [EDCMD] en el TP
TPIF-060 WARN Can't record on cartesian (Group:%d)
(Causa)
Esta posicin actual se encuentra en una singularidad
(Solucin) Puede grabar esta posicin slo en el tipo joint. Seleccione la tecla de funcin que desee.
TPIF-061 WARN Group[%s] has not recorded
(Causa)
Estos datos de posicin no se han cambiado para los grupos mostrados porque ha
seleccionado la tecla de funcin que no ha grabado la posicin, al efectuar la
comprobacin en singularidad.
(Solucin) Vuelva a comprobar la posicin grabada antes de la ejecucin
TPIF-062 AND operator was replaced to OR
(Causa)
Todos los operadores AND de esta lnea se han sustituido por operadores OR.
(Solucin) No puede mezclar el operador AND y OR en a la misma lnea.
Verificar que todos los operadores lgicos en esta lnea son los mismos que antes de la
ejecucin.
TPIF-063 AND operator was replaced to AND
(Causa)
Todos los operadores OR en esta lnea fueron reemplazados por operadores AND.
No puede mezclar el operador AND OR en la misma lnea.
(Solucin) Compruebe todos los operadores lgicos de esta lnea antes de la ejecucin
TPIF-064 Too many AND/OR operator(Max.4)
(Causa)
Demasiados operadores AND/OR (Mx.4 en una sola lnea)
(Solucin) Programe la operacin lgica en otra lnea
TPIF-065 Arithmetic operator was unified to +- or */
(Causa)
El operador aritmtico en esta lnea ha cambiado a +- o */.
No puede mezclar operadores de aritmtica + y - con * y /operadores en la misma lnea.
(Solucin) Compruebe todos los operadores aritmticos de esta lnea antes de la ejecucin
TPIF-066 Too many arithmetic operator(Max.5)
(Causa)
Demasiados operadores aritmticos (Mx.5 en una sola lnea)
(Solucin) Programe la operacin aritmtica en otra lnea
TPIF-067 Too many arguments (Max.10)
(Causa)
Demasiados argumentos (Mx.10 para un programa o una macro)
(Solucin) Compruebe los argumentos del programa/de la macro
-1367-
APENDICE D
B-82284ES-3/01
TPIF-070 Cannot teach the instruction
(Causa)
No se puede programar la instruccin.
(Solucin) Compruebe el subtipo del programa.
TPIF-071 Cannot change sub type
(Causa)
No se puede cambiar el subtipo
(Solucin) Compruebe el subtipo del programa.
TPIF-072 Cannot change motion group
(Causa)
No se puede cambiar el grupo de movimiento
(Solucin) Compruebe el subtipo del programa.
TPIF-090 WARN This program has motion group
(Causa)
El programa indicado en $PWR_HOT, $PWR_SEMI y $PWR_NORMAL no debe
tener grupo de movimiento.
(Solucin) Configure * en todos los grupos de movimiento en la pantalla de datos de la TP.
TPIF-091 WARN PREG access error
(Causa)
Se ha producido un error al acceder a un registro de posicin.
(Solucin) Consulte el cdigo de causas de errores.
TPIF-092 Value %d expected %s
(Causa)
El valor_matriz proporcionado a una rutina incorporada KAREL se ha indicado
incorrectamente.
(Solucin) Asegrese de que el valor_matriz indica los nombres correctos para las variables y de
que los tipos esperados son correctos.
TPIF-093 USER menu must be selected
(Causa)
Error interno del software.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-094 USER2 menu must be selected
(Causa)
Error interno del software.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-095 WARN Execution history table error
(Causa)
Error interno del software
(Solucin) Efecte un inicio controlado (no es necesario reiniciar el nuevo elemento)
TPIF-097 WARN Running task's history can't display
(Causa)
No se puede mostrar el historial de ejecucin del programa en ejecucin.
(Solucin) Cuando el programa est en pausa o se aborte consulte esta pantalla
TPIF-098 WARN %s was not run
(Causa)
No se ejecuta el programa de $PWR_HOT, $PWR_SEMI o $PWR_NORMAL
(Solucin) Lea el cdigo de causas
-1368-
APENDICE D
B-82284ES-3/01
TPIF-099 WARN This program is edited
(Causa)
No se ejecuta el programa indicado en $PWR_HOT, $PWR_SEMI y
$PWR_NORMAL cuando el programa se est editando.
(Solucin) Seleccione el otro programa
TPIF-100 WARN No vacant table space
(Causa)
Se ha producido una situacin no permitida en el software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
TPIF-101 WARN No such menu
(Causa)
Se ha producido una situacin no permitida en el software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
TPIF-102 WARN E.STOP is asserted
(Causa)
Se selecciona la ejecucin FWD con E.STOP montada.
(Solucin) Desactive E.STOP. A continuacin, seleccione la ejecucin FWD
TPIF-103 WARN Dead man is released
(Causa)
Al iniciar el programa con la consola de programacin se ha liberado el interruptor
deadman.
(Solucin) Pulse y mantenga pulsado el interruptor deadman e inicie un programa.
TPIF-104 WARN Teach Pendant is disabled
(Causa)
No se ha iniciado un programa porque la consola de programacin estaba desactivada.
(Solucin) Tras activar el interruptor de la consola de programacin, inicie un programa.
TPIF-105 WARN Program is not selected
(Causa)
Se ha iniciado un programa sin seleccionar un programa.
(Solucin) Tras seleccionar un programa, incielo.
TPIF-106 WARN Program is already running
(Causa)
Se ha efectuado el arranque desde la consola de programacin mientras un programa
estaba en ejecucin.
(Solucin) Inicie un programa tras esperar la edicin del programa o abortarlo.
TPIF-107 WARN FWD/BWD is disabled
(Causa)
1. Se ha iniciado un programa cuando el inicio estaba prohibido, como la introduccin
del valor en la lnea del mensaje,
2. Un programa no fue seleccionado.
(Solucin) 1. Tras finalizar el procedimiento de introduccin del valor, inicie un programa. 2.
Seleccione un programa e incielo.
TPIF-108 WARN Form error, line %d, item %d
(Causa)
El Administrador de formato ha detectado un error en la lnea indicada con el elemento
indicado.
(Solucin) Consulte el cdigo de causas de errores para averiguar la causa del error actual.
-1369-
APENDICE D
B-82284ES-3/01
TPIF-109 WARN %v not specified correctly
(Causa)
Se ha producido un error de software interno.
(Solucin) Pngase en contacto con el servicio tcnico de FANUC de su zona.
TPIF-110 WARN Screen used by other device
(Causa)
Se ha producido un error de software interno.
(Solucin) Pngase en contacto con el servicio tcnico de FANUC de su zona.
TPIF-111 op_global does not exist
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-112 op_sel does not exist
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-113 Illegal param in op menu
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-114 Illegal data in op menu
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-115 Data is full
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-116 System variable error: %s
(Causa)
El nombre de la variable no es vlido.
(Solucin) Compruebe el formato del nombre, y si est correctamente escrito.
TPIF-117 Cannot backup to device: %s
(Causa)
El dispositivo por defecto no es vlido para la copia de seguridad
(Solucin) Seleccione un dispositivo vlido y vuelva a intentarlo
TPIF-118 File error for %s
(Causa)
Error de archivo
(Solucin) Realizar un arranque en fro:
1. Apagar el robot.
2. En la consola de programacin, pulsar y mantener presionadas las teclas SHIFT y
RESET.
3. Mientras se presionan las teclas SHIFT y RESET, encender el robot.
Si el error no se ha borrado, documentar los casos que
-1370-
APENDICE D
B-82284ES-3/01
TPIF-119 File compression failed
(Causa)
Se ha producido un fallo al crear el archivo comprimido
(Solucin) Compruebe el dispositivo de seguridad
TPIF-120 Device failure
(Causa)
Fallo en el dispositivo
(Solucin) Compruebe el dispositivo y vuelva a intentarlo
TPIF-121 Invalid copy. Use la tecla MOVE.
(Causa)
No se puede copiar un archivo de un dispositivo de memoria en el mismo dispositivo de
memoria.
(Solucin) Use la tecla MOVE y vuelva a intentarlo
TPIF-122 Specified softpart ID is illegal
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-123 No active applications
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-124 Current application is nothing
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-125 Specified softpart ID is nothing
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-126 THKY ASLOAD is failed
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-127 TOPK ASLOAD is failed
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-128 Verify logic of pasted line(s)
(Causa)
La funcin de copia de movimiento reverso no apoya la siguiente instruccin de opcin
de movimiento.
1. Comando de aplicacin
2. Salto, Quick Skip
3. Incremental
4. Vuelta contnua
5. Comando de ejecucin adelante
(Solucin) Compruebe la instruccin de opcin de movimiento anterior.
Modifique la instruccin copiada para que sea correcta.
-1371-
APENDICE D
B-82284ES-3/01
TPIF-129 Group motion inst. is pasted
(Causa)
La instruccin de movimiento de grupo est copiada. La funcin de copia de
movimiento inverso no incluye la instruccin de movimiento de grupo.
(Solucin) Compruebe la instruccin de movimiento de grupo.
Modifique la instruccin copiada para que sea correcta.
TPIF-130 Specified application has no EQ
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
TPIF-131 Please set application mask data
(Causa)
Este programa no tiene pantalla de aplicacin
(Solucin) Defina la pantalla de aplicacin en la pantalla de datos del programa.
TPIF-132 Can't recover this operation
(Causa)
Como los datos para UNDO no se pueden guardar, esta operacin no se puede recuperar
mediante la funcin UNDO
(Solucin) Compruebe el cdigo de causas.
Si la memoria est llena, borre el programa o desactive la funcin UNDO.
TPIF-133 Can't recover this command
(Causa)
No se pueden recuperar ni el comando de paletizar ni el de control de cumplimiento
mediante la funcin UNDO
-1372-
APENDICE D
B-82284ES-3/01
D.2.6 Cdigos de error MOTN (ID=15)
MOTN-001 to 008 STOP.G Error interno en osmkpkt
(Causa)
Error interno del sistema.
(Solucin) Inicio de ciclo del controlador
MOTN-009 STOP.G Internal error for single step
(Causa)
La herramienta se ha detenido en medio de un arco en el modo de un solo paso.
(Solucin) Ignore esta alarma.
MOTN-010 to 011 STOP.G Internal error in osathpkt
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-012 STOP.G Invalid softpart MIR
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-013 STOP.G Invalid softpart SEG
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-017 STOP.G Limit error (Group:%d^2, Axis:%x^3 Hex)
(Causa)
La posicin indicada est fuera del rango movible articular
($PARAM_GROUP.$LOWERLIMS, $PARAM_GROUP.$UPPERLIMS).
El eje j se define como hexadecimal, tal como se muestra a continuacin.
Eje 1: 1, Eje 2: 2, Eje 3: 4, Eje 4: 8, Eje 5: 10, Eje 6: 20, Eje 7: 40, Eje 8: 80, Eje 9: 100
Si dos o ms ejes han provocado esta alarma, el total de sus valores, mostrado
anteriormente, se muestra como hexadecimal.
Ejemplo:
(Solucin 1) Corrija la posicin para que est dentro del rango movible.
(Solucin 2) Cambie las configuraciones del rango movible de la pantalla de rango movible, que se
muestra seleccionando 6 SYSTEM AXIS LIMITS.
MOTN-018 STOP.G Position not reachable
(Causa)
La posicin no es alcanzable o est prxima a un punto de singularidad.
(Solucin) Vuelva a programar la posicin no alcanzable.
MOTN-019 WARN In singularity
(Causa)
La posicin est cerca de un punto de singularidad.
(Solucin) Vuelva a programar la posicin que est cerca de un punto de singularidad.
MOTN-020 WARN Wristjoint warning
(Causa)
Advertencia de conexin de mueca
(Causa)
Advertencia de conexin de mueca
-1373-
APENDICE D
B-82284ES-3/01
MOTN-021 STOP.G No kinematics error
(Causa)
No hay cinemtica.
(Solucin) Use el movimiento articular.
MOTN-022 STOP.G Invalid limit number
(Causa)
Nmero de lmite no vlido.
(Solucin) Configure el nmero de lmite correctamente.
MOTN-023 STOP.G In singularity
(Causa)
La posicin est cerca de un punto de singularidad.
(Solucin) Vuelva a programar la posicin que est cerca de un punto de singularidad.
MOTN-024 STOP.G Kinematics not defined
(Causa)
La cinemtica no est definida.
(Solucin) Defina la cinemtica.
MOTN-030 to 046 STOP.G Internal error in MMGR:PEND
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-047 Internal error in MMGR:PRST
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MOTN-049 STOP.G Attempt to move w/o calibrated
(Causa)
Robot no calibrado.
(Solucin) Calibre el robot.
MOTN-050 STOP.G Invalid spdlim (Group:%d^2 Axis:%x^3 H)
(Causa)
Se ha producido un error de software interno. El factor de velocidad articular
($PARAM_GROUP.$SPEEDLIMJNT) no es vlido.
El eje j se define como hexadecimal, tal como se muestra a continuacin.
Eje 1: 1, Eje 2: 2, Eje 3: 4, Eje 4: 8, Eje 5: 10, Eje 6: 20, Eje 7: 40, Eje 8: 80, Eje 9: 100
Si dos o ms ejes han provocado esta alarma, el total de sus valores, mostrado
anteriormente, se muestra como hexadecimal.
Ejemplo:
(Solucin)
Corrija el factor de velocidad articular.
MOTN-051 to 53 STOP.G Speed out of range (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1374-
APENDICE D
B-82284ES-3/01
MOTN-054 STOP.G Uninitialized dest pos (Group:%d^2)
(Causa)
Posicin de destino no inicializada.
(Solucin) Programe la posicin de destino.
MOTN-055 STOP.G Uninitialized via pos (Group:%d^2)
(Causa)
Posicin de va no inicializada.
(Solucin) Programe la posicin de la va.
MOTN-056 WARN Speed limits used (Group:%d^2)
(Causa)
Se usan los lmites de velocidad.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
MOTN-057 to 062 STOP.G Invalid mir (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-063 STOP.G Position config change (Group:%d^2)
(Causa)
Para operaciones de trayectoria controlada (operacin lineal o circular), se configuran
diferentes datos de posicin para el punto inicial y el punto final.
(Solucin 1) Configure el mismo formato de datos de posicin para el punto inicial y el punto final.
(Solucin 2) Indique el modo de operacin articular.
(Solucin 3) Indique una instruccin de conexin de mueca (instruccin de aadir operacin).
MOTN-064 and 065 STOP.G Rs orientation error (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-066 STOP.G Degenerate circle (Group:%d^2)
(Causa)
Para operacin circular, los datos de posicin para el punto de inicio, punto de paso, y
punto de final no son vlidos.
a. Dos de los puntos de inicio, paso, y final se solapan unos con otros.
b. Todos los puntos del inicio, paso, y final son organizados en una lnea recta.
(Solucin) Indique los puntos iniciales, de paso y finales adecuados para la operacin circular.
MOTN-067 to 072 STOP.G Ata2 error in circle (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-073 STOP.G Error in orientype (Group:%d^2)
(Causa)
Error interno: el planificador ha recibido un tipo de orientacin no vlido.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-074 to 079 STOP.G Error in speed (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1375-
APENDICE D
B-82284ES-3/01
MOTN-080 STOP.G Via position required (Group:%d^2)
(Causa)
No hay posicin de va para el movimiento circular.
(Solucin) Programe la posicin de la va.
MOTN-081 STOP.G Extended position error (Group:%d^2)
(Causa)
No hay ningn valor configurado para el eje adicional.
(Solucin) Configure un valor para el eje adicional.
MOTN-082 to 087 STOP.G (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-088 STOP.G Not cartesian move (Group:%d^2)
(Causa)
El modo no es cartesiano.
(Solucin) Debe configurar el modo cartesiano.
MOTN-089 to 091 STOP.G (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-092 STOP.G Extended not supported (Group:%d^2)
(Causa)
Sin eje extendido
(Solucin) No use ejes extendidos.
MOTN-093 and 094 STOP.G Internal (Group:%d^2)
(Causa)
Error de plan interno
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-095 WARN Can't blend corner line:%d^5
(Causa)
Bajo control del vector de aceleracin, la instruccin de operacin indicada genera una
trayectoria del robot inconstante.
(Solucin 1) Deconecte el control del vector de aceleracin.
(Solucin 2) Corrija la instruccin de funcionamiento para que pueda ejecutarse con normalidad.
MOTN-096 STOP.G Cart rate not equal(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-097 WARN INTR overrun %d^3 (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-098 to 109 STOP.G INTR (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1376-
APENDICE D
B-82284ES-3/01
MOTN-110 STOP.G Use FINE in last L (Group:%d^2)
(Causa)
Durante la ejecucin de la instruccin de operacin indicada, no se ha podido llevar a
cabo la operacin articular.
(Solucin) Corrija la instruccin de operacin segn la operacin de trayectoria controlada que
desee.
MOTN-111 WARN Can't switch filter(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-112 Increment move turn Mismatch
(Causa)
El movimiento de incremento provoca que no coincida el nmero de giro
(Solucin) Seleccione la posicin absoluta
MOTN-113 WARN Robot not calibrated
(Causa)
Robot no calibrado.
(Solucin) Calibre el robot.
MOTN-114 WARN Servo is on (Group:%d^2)
(Causa)
El servo todava est conectado.
(Solucin) Desconecte el servo.
MOTN-115 WARN Invalid brake mask (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-116 WARN Invalid solution (Group:%d^2)
(Causa)
Solucin cinemtica no vlida.
(Solucin) Vuelva a programar la posicin.
MOTN-117 WARN Robot not mastered (Group:%d^2)
(Causa)
El robot no est masterizado.
(Solucin) Masterice el robot.
MOTN-118 WARN Robot in over travel (Group:%d^2)
(Causa)
Sobredesplazamiento del robot.
(Solucin) Saque el robot de la posicin de sobredesplazamiento.
MOTN-119 WARN Servo is off (Group:%d^2)
(Causa)
El serbo del robot est conectado.
(Solucin) Desconecte la potencia del servo.
MOTN-120 to 121 WARN Invalid reference position (Group:%d^2)
(Causa)
Error interno del sistema
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1377-
APENDICE D
B-82284ES-3/01
MOTN-122 STOP.G Dfilter not empty (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-123 WARN Not enough node (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-124 to 127 STOP.G INTR:Bad Mirpkt req_code(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-128 STOP.G Group mtn not supported(Group:%d^2)
(Causa)
Sin movimiento de grupo.
(Solucin) Tome nota de las causas que provocaron el error y pngase en contacto con el servicio
de asistencia tcnica de su zona.
MOTN-129 and 130 STOP.G Local cond ptr conflict(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-131 STOP.G In singularity
(Causa)
Posicin cerca de un punto de singularidad.
(Solucin) a. Separe bien el punto de destino del punto singular.
b. Use coordenadas articulares para indicar el punto de destino en el modo de
funcionamiento articular.
MOTN-132 STOP.G Group circ not supported(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-133 WARN Time after limit used(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-134 STOP.G Can not move path backward (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-135 STOP.G Last motype can't be circular (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-136 STOP.G Illegal filter switch line:%d^5
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1378-
APENDICE D
B-82284ES-3/01
MOTN-137 STOP.G No circular softpart (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-138 STOP.G No joint short motion SP (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-139 STOP.G No cart short motion SP (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-140 STOP.G No KAREL motion softpart (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-141 STOP.G No KAREL motion func. ptr (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-142 STOP.G No Group Motion SP (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-143 STOP.G No Motion Resume SP (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-144 STOP.G No joint Turbo Move SP (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-145 STOP.G No joint Turbo Move SP (Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-146 STOP.G INTR can't replan major axis(Group:%d^2)
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MOTN-147 WARN L->J replan joint slowdown (Group:%d^2)
(Causa)
Los movimientos lineales ignorar los nmeros de giro. Por lo tanto, cuando un
movimiento articular sigue varios movimientos lineales, el nmero de giro puede no
coincidir, lo que reducir la velocidad del robot.
(Solucin) Seleccione lineal como tipo de movimiento actual o articular como modo de
movimiento previo. Si el problema persiste, vuelva a programar la trayectoria.
-1379-
APENDICE D
B-82284ES-3/01
MOTN-148 SWARN Can't move concurrently (Group:%d^2)
(Causa)
Dos grupos de movimientos no pueden sincronizarse a causa de la nueva planificacin
de un grupo.
Se reducir la velocidad de ambos grupos.
(Solucin) Si la reduccin de velocidad no es aceptable, vuelva a programar la trayectoria.
MOTN-149 STOP.G CF:rotspeedlim exceeded line:%d^5
(Causa)
CF:lmite de velocidad de rotacin superado.
(Solucin 1) Configure la variable del sistema $cf_paramgp[].$cf_framenum en 1 o 2.
Desconecte la potencia y vuelva a conectarla.
(Solucin 2) Reduzca la velocidad.
(Solucin 3) Indique el posicionamiento como operacin previa.
MOTN-161 (%s^4 L:%d^5) Can't look ahead
(Causa)
Con la funcin de control del tiempo ms breve, las lneas no se pueden leer por
adelantado.
Se pueden dar las siguientes situaciones:
- El registro de posicin se emplea sin bloqueo.
- Se emplea la instruccin if/selection.
- Se llama otro programa.
(Solucin) Use la instruccin de bloquear registro de posicin.
Elimine la instruccin if/selection.
Integre los programas en uno.
MOTN-171 Overload
(Causa)
Hay una sobrecarga.
(Solucin) Reduzca la carga.
MOTN-172 Another robot is re-linked
(Causa)
Se ha vuelto a conectar el robot de un destino de conexin, por lo tanto es operacin se
detuvo.
(Solucin) Detenga todos los robts conectados y vuelva a arrancarlos.
MOTN-173 Robot link configuration error
(Causa)
La configuracin de la conexin del robot no es correcta.
(Solucin) Compruebe el nmero del servidor y la direccin IP en la configuracin de
comunicacin del servidor y compruebe tambin la configuracin de la conexin del
robot.
MOTN-174 No motion control
(Causa)
Esta alarma se muestra, por ejemplo, cuando una operacin para una configuracin
principal o secundaria como la manipulacin de la pantalla de funcionamiento manual
o la ejecucin de un programa se llevan a cabo con el robot en movimiento segn un
programa o una operacin de movimiento.
(Solucin) Ejecute una operacin al detenerse el robot.
-1380-
APENDICE D
B-82284ES-3/01
MOTN-175 Failed to be MASTER
(Causa)
En el momento de conectar el estado principal mediante la ejecucin del programa o el
funcionamiento manual, el movimiento del robot no ha concluido, o la configuracin es
incorrecta.
(Solucin) Modifique el programa o compruebe la configuracin de la conexin del robot.
MOTN-176 Failed to be SLAVE
(Causa)
En el momento de conectar el estado principal mediante la ejecucin del programa o el
funcionamiento manual, el movimiento del robot no ha concluido, o la configuracin es
incorrecta.
(Solucin) Modifique el programa o compruebe la configuracin de la conexin del robot.
MOTN-177 Failed to end sync motion
(Causa)
Si el principal y el secundario no se han detenido o la configuracin es incorrecta, el
movimiento sincronizado no se puede completar.
(Solucin) Compruebe la instruccin de movimiento del programa y la configuracin de la
conexin del robot.
MOTN-178 Link robot is HELD
(Causa)
Tras iniciar el movimiento sincronizado, se ha detectado que el robot del destino de
comunicacin ha perdido sincronismo a causa de la finalizacin del programa, por
ejemplo.
(Solucin) Los programas se detienen temporalmente. Vuelva a arrancar los programas del
principal y el secundario.
MOTN-179 Robot link internal error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MOTN-180 Robot link Calib-data not found
(Causa)
No se pueden hallar los datos de calibrado.
(Solucin) Calibre la conexin del robot.
MOTN-181 Robot link Version mismatch
(Causa)
El software de la conexin no es el mismo en el robot principal que en el secundario.
(Solucin) Ponga la misma versin de software en el robot principal y el secundario.
MOTN-182 Failed to get data from master
(Causa)
No se transmiten datos de comunicacin desde el robot principal.
(Solucin) Compruebe el cable Ethernet, la conexin del cable, la terminal, el panel principal y la
configuracin de la conexin del robot.
MOTN-184 Invalid MNUTOOL data array
(Causa)
El valor de la variable del sistema $MNUTOOL no es vlido.
(Solucin) Cambie el valor de la variable $MNUTOOL del sistema $MNUTOOL.
-1381-
APENDICE D
B-82284ES-3/01
MOTN-185 Protect of ACK BF to be sent
(Causa)
La memoria del robot esclavo para la comunicacin desde ste al robot principal est
protegida.
(Solucin) No se necesita ninguna accin especial.
MOTN-186 Protect of BCST BF to be sent
(Causa)
La memoria del robot principal para la comunicacin desde ste al robot esclavo est
protegida.
(Solucin) No se necesita ninguna accin especial.
MOTN-187 Protect of ACK BF to be read
(Causa)
La memoria del robot principal para la comunicacin desde el robot esclavo al robot
principal est protegida.
(Solucin) No se necesita ninguna accin especial.
MOTN-188 Protect of BCST BF to be read
(Causa)
La memoria del robot esclavo para la comunicacin desde el robot principal al robot
esclavo est protegida.
(Solucin) No se necesita ninguna accin especial.
MOTN-189 Slave motion remained
(Causa)
En el robot esclavo, la cantidad de desplazamiento del movimiento anterior persiste
antes de iniciar el programa esclavo.
(Solucin) Reinicie tras completar el movimiento anterior.
MOTN-190 Slave cannot use JOINT pos
(Causa)
Los datos de la instruccin de movimiento del robot esclavo estn en formato articular.
(Solucin) Cambie los datos al formato ortogonal.
MOTN-191 Slave cannot JOINT motion
(Causa)
El programa esclavo no puede efectuar un movimiento articular.
(Solucin) Cambie la instruccin para que sea una instruccin de movimiento ortogonal.
MOTN-192 UT of MASTER was changed
(Causa)
En el estado principal, se ha cambiado el sistema de coordenadas de la herramienta del
robot principal.
(Solucin) No camie el sistema de coordenadas de la herramienta en el estado principal.
MOTN-193 UT of SLAVE was changed
(Causa)
En el estado secundario, se ha cambiado el sistema de coordenadas de la herramienta
del robot esclavo.
(Solucin) No cambie el sistema de coordenadas de la herramienta en el estado secundario.
MOTN-194 Machine Lock is ENABLED
(Causa)
En el estado de bloqueo principal, el movimiento sincronizado est desactivado.
(Solucin) Cancele el estado de bloqueo de la mquina.
-1382-
APENDICE D
B-82284ES-3/01
MOTN-195 RLINK internal error %d^5
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MOTN-198 CRC Start-Via too close(L:%d^5)
(Causa)
El punto inicial y el punto central de un arco estn demasiado prximos el uno del otro.
(Solucin) Vuelva a programar el robot. Los puntos programados de un arco deben estar en el
mismo plano. De lo contrario, una pequea modificacin de la programacin puede
provocar un cambio importante en el movimiento.
MOTN-199 CRC Via-Dest too close(L:%d^5)
(Causa)
El punto intermedio y el punto final de un arco estn demasiado prximos el uno del
otro.
(Solucin) Los puntos programados de un arco deben estar en el mismo plano. De lo contrario, una
pequea modificacin de la programacin puede provocar un cambio importante en el
movimiento.
MOTN-200 (%s^4, %d^5) Too long anticipate time
(Causa)
El valor del tiempo de procesamiento avanzado (Timebefore) es demasiado elevado.
(Solucin) - Vuelva a programar el punto programado anteriormente para aumentar la distancia de
movimiento.
- Reduzca el tiempo de procesamiento avanzado.
MOTN-230 T1 rotspeed limit (G:%d^2)
(Causa)
Se ha estabilizado la velocidad de cambio de posicin en el modo T1.
(Solucin) Reduzca la velocidad de programacin. Tambin puede usar una instruccin de
movimiento en grados/seg o seg.
MOTN-231 T1 Speed restriction (G:%d^2)
(Causa)
Se ha llevado a cabo el procesamiento de la restriccin de velocidad cuando la velocidad
programada es 250 mm/seg o inferior.
(Solucin) La velocidad de la seccin de la brida ha superado los 250 mm/seg a causa de un cambio
en la posicin de la herramienta. Esta alarma es una advertencia, y no representa un
fallo.
Sin embargo, el movimiento real de esta parte debe comprobarse en el modo T2.
MOTN-240 J4 is not zero
(Causa) El eje J4 no est en la posicin 0 .
(Solucin) Haga un movimiento para situar el eje J4 en la posicin 0 .
MOTN-241 OFIX stroke limit
(Causa)
Se ha detectado un lmite de colisiones en el movimiento con posicin fija.
(Solucin) Compruebe el rango de movimiento y vuelva a programa el robot para que el
movimiento no supere el rango.
MOTN-242 OFIX is disabled
(Causa)
La instruccin de movimiento en posicin fija est desactivada.
(Solucin) Compruebe si el robot incorpora el movimiento en posicin fija.
-1383-
APENDICE D
B-82284ES-3/01
MOTN-243 OFIX error
(Causa)
La instruccin de movimiento en posicin fija no se puede ejecutar debido a otra causa.
(Solucin) Compruebe si se muestran otras alarmas en el historial de alarmas.
MOTN-244 OFIX Detect J4 is not 0
(Causa)
J4 en la posicin de inicio o de destino de movimiento no est en la posicin 0 .
(Solucin) Compruebe el valor de J4 en cada posicin y haga modificaciones.
MOTN-245 OFIX Wrist config mismatch
(Causa)
La configuracin de la posicin de inicio de movimiento no coincide con la posicin de
destino de movimiento.
(Solucin) Compruebe la posicin y haga modificaciones.
Si el movimiento todava no resulta, emplee el movimiento articular.
MOTN-246 OFIX Invalid rail vector
(Causa)
La instruccin de movimiento en posicin fija est desactivada.
(Solucin) Compruebe si el robot incorpora el movimiento en posicin fija
MOTN-247 E-Effector is not vertical to rail
(Causa)
La superficie de brida no es paralela al eje J1.
(Solucin) Site el robot en una postura de manera que la superficie de brida sea paralela al eje J1.
MOTN-248 OFIX Too large tool rotation
(Causa)
En el movimiento en posicin fija, el ngulo de rotacin de la brida entre el punto inicial
y el punto final ha superado el rango tolerable en un movimiento.
(Solucin) Divida el movimiento y programe cada parte dividida del movimiento.
MOTN-249 OFIX Too large tool spin
(Causa)
En el movimiento en posicin fija, el ngulo de rotacin de J6 entre el punto inicial y el
punto final ha superado el rango tolerable en un movimiento.
(Solucin) Divida el movimiento y programe cada parte dividida del movimiento.
MOTN-250 Use CNT0/FINE for L/C before OFIX
(Causa)
Un movimiento circular o un movimiento lineal que no es el movimiento en posicin
fija
(Solucin) Cambie el modo de posicionamiento del movimiento circular o el movimiento lineal
hange the positioning mode of the circular motion or linear motion a 0 suave o
posicionamiento.
MOTN-251 Can't use OFIX with this motion
(Causa)
Se indica una instruccin de movimiento, como una instruccin de movimiento de
incremento o TCP remoto, que no se puede usar al mismo tiempo con la instruccin de
fijar la posicin.
(Solucin) Modifique la instruccin.
-1384-
APENDICE D
B-82284ES-3/01
MOTN-252 OFIX: No hay datos de planificacin.
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MOTN-253 OFIX: No coincide el tipo de movimiento
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MOTN-254 OFIX: Se ha detectado un giro amplio
(Causa)
El cambio de la posicin de la herramienta para cada movimiento es demasiado amplio.
(Solucin) Divida el movimiento y programe cada parte dividida del movimiento.
MOTN-255 OFIX: Se ha detectado que J4 no es 0
(Causa)
Durante el movimiento, se ha detectado que J4 no est en la posicin 0 .
(Causa)
Esta alarma se muestra porque J4 est ligeramente desplazado de la posicin 0 en el
punto de inicio o de fin del movimiento, o el cambio angular de la brida para cada
movimiento es demasiado amplio.
(Solucin) Compruebe los valores del punto inicial y final de J4.
Si esta alarma se muestra aunque el J4 est programado para adoptar exactamente la
posicin 0 en ambos puntos, divida la instruccin de movimiento.
MOTN-256 OFIX: Lmite de configuracin de TCP
(Causa)
Se ha alcanzado un lmite de movimiento lineal.
(Solucin) Cambie la posicin de destino o pase al movimiento articular.
MOTN-257 Wrist start angle mismatch
(Causa)
El ngulo inicial de movimiento del eje de la mueca no coincide con el clculo interno
para el movimiento en posicin fija.
(Solucin) Modifique la programacin nicamente para que el eje J4 se mueva completamente con
0 grados.
Adems, compruebe si se usa una aplicacin como la del movimiento de compensacin
para un movimiento y si se usa una instruccin de aadir movimiento como la
compensacin de un movimiento.
MOTN-258 Not reached to dest rotation
(Causa)
Al final del movimiento en posicin fija, la posicin de llegada de la herramienta no
coincide con el clculo interno para el movimiento en posicin fija.
(Solucin) Modifique la programacin nicamente para que el eje J4 se mueva completamente con
0 grados.
Adems, compruebe si se usa una aplicacin como la del movimiento de compensacin
para un movimiento y si se usa una instruccin de aadir movimiento como la
compensacin de un movimiento.
-1385-
APENDICE D
B-82284ES-3/01
MOTN-259 Not reached to dest spin
(Causa)
Al final del movimiento en posicin fija, la posicin de llegada de la herramienta no
coincide con el clculo interno para el movimiento en posicin fija.
(Solucin) Modifique la programacin nicamente para que el eje J4 se mueva completamente con
0 grados.
Adems, compruebe si se usa una aplicacin como la del movimiento de compensacin
para un movimiento y si se usa una instruccin de aadir movimiento como la
compensacin de un movimiento.
MOTN-300 CD not support:Use CNT L:%d^5
(Causa)
No se incorpora el CD del tipo de plazo.
(Solucin) Seleccione el tipo de plazo FINE o CNT.
MOTN-301 Path to resume is changed(G:%d^2)
(Causa)
No se puede reanudar el movimiento.
(Solucin) Aborte y ejecute un programa.
MOTN-302 Corner speed slowdown L:%d^5
(Causa)
La velocidad de los rincones se reduce automticamente a causa de la limitacin del
robot.
(Solucin) Si la reduccin de velocidad no es aceptable, vuelva a programar la trayectoria.
MOTN-303 Can't maintain CDist L:%d^5
(Causa)
No se puede mantener la distancia angular porque la trayectoria es corta o la velocidad
es elevada.
(Solucin) Alargue la trayectoria o reduzca la velocidad.
MOTN-304 CS:Prog speed achieved L:%d^5
(Causa)
El valor de SPD ya no afecta la velocidad angular.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
MOTN-305 Can't maintain speed L:%d^5
(Causa)
No se puede mantener la velocidad del programa en la trayectoria a causa de la
limitacin del robot.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
MOTN-306 Can't replan (G:%d^2, A:%x^3 Hex)
(Causa)
El movimiento reanudado no puede alcanzar la posicin de paro
No se puede reanudar la trayectoria original.
(Solucin) Aborte el programa y vuelva a ejecutarlo
MOTN-307 Mismatch MMR (G:%d^2)
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
-1386-
APENDICE D
B-82284ES-3/01
MOTN-308 FINE termtype used L:%d^5
(Causa)
No se puede generar ngulo entre dos movimientos a causa de la instruccin de
movimiento.
Y CNT o CD es ignorado.
(Solucin) Use la instruccin LOCK PREG al usar PR[] para la posicin o usar una instruccin de
DESVIACIN.
MOTN-309 Circular speed reduced L:%d^5
(Causa)
La velocidad circular se reduce a causa de la limitacin del robot
(Solucin) Reduzca la velocidad del programa que no se muestra.
MOTN-310 Pos. Cfg. change 2 (G:%d^2)
(Causa)
La configuracin no coincide.
(Solucin) La secuencia coincide con la secuencia de configuracin de la posicin de inicio.
MOTN-311 Path to resume is changed(G:%d^2)
(Causa)
No se puede reanudar el movimiento en la trayectoria original.
(Solucin) Aborte y ejecute un programa.Entonces el movimiento reanudado puede no estar en la
trayectoria original.
MOTN-312 Can't resume in single step CJ
(Causa)
No se puede reanudar el movimiento en el modo de un solo paso.
(Solucin) Aborte el programa y vuelva a ejecutarlo.
MOTN-313 Can't resume motion CJ(2)
(Causa)
No se puede reanudar el movimiento en la trayectoria original.
(Solucin) Aborte y ejecute un programa.Entonces el movimiento reanudado puede no estar en la
trayectoria original.
MOTN-314 Can't resume motion CJ(3)
(Causa)
No se puede reanudar el movimiento en la trayectoria original a causa de la condicin
de movimiento.
(Solucin) Aborte y ejecute un programa.Entonces el movimiento reanudado puede no estar en la
trayectoria original.
MOTN-315 Command speed is changed CJ
(Causa)
No se puede reanudar el movimiento en la trayectoria original a causa del cambio en la
velocidad de comando.
(Solucin) Vuelva a modificar la velocidad de comando o aborte el programa
MOTN-316 Override change not allowed
(Causa)
Se ha efectuado un cambio de exceso cuando CJP estaba desactivado y se reiniciaba el
programa.
(Solucin) Efecte un cambio de exceso antes de reiniciar el programa. No efecte un cambio de
exceso inmediatamente despus de reiniciar el programa.
-1387-
APENDICE D
B-82284ES-3/01
MOTN-319 CRC large orient change (G:%d^2)
(Causa)
El pequeo crculo provoca un gran cambio de posicin.
(Solucin) Vuelva a programar el robot.
MOTN-320 Adj out of limit at line %s
(Causa)
Durante una comprobacin de configuracin exacta, se ha detectado una posicin que
no puede alcanzarse.
(Solucin) Desde el mensaje de alarma, identifique la lnea que ha generado la alarma.
Use CLR_Adj para elminar el valor de configuracin.
MOTN-321 Posn unreachable at line %s
(Causa)
Durante una comprobacin de configuracin exacta, se ha detectado una posicin que
no puede alcanzarse.
(Solucin) Desde el mensaje de alarma, identifique la lnea que ha generado la alarma.
Use CLR_Adj para elminar el valor de configuracin.
MOTN-340 Fast fault recovery
(Causa)
Se informa del proceso de aplicacin activado en la recuperacin por defecto rpida al
encontrar la posicin de la alarma.
(Solucin) N/A
MOTN-341 NO Z offset for INC motion
(Causa)
Hay un valor de exceso Z que no se puede aplicar a un movimiento de incremento.
(Solucin) No use un movimiento de incremento.
MOTN-342 Override change not allowed
(Causa)
Cambie la configuracin de exceso en la consola de programacin mientras el programa
est en ejecucin.
(Solucin) Configure el exceso de la consola de programacin en el valor que desee y reanude el
programa
-1388-
APENDICE D
B-82284ES-3/01
D.2.7 Cdigos de error PALT (ID=26)
PALT-001 ABORT.G Inadequate register value
(Causa)
Nmero de columna/fila/capa es ilegal.
(Solucin) Se ruega confirmar el registro de paletizacin.
PALT-002 ABORT.G Computing shift vector
(Causa)
Los datos de posicin de la especificada columna/fila/capa no pueden ser calculados.
(Solucin) Programar un punto de amontonamiento apropriado.
PALT-003 ABORT.G Computing rotation matrix
(Causa)
Los datos de posicin de la especificada columna/fila/capa no pueden ser calculados.
(Solucin) Programar un punto de amontonamiento apropriado.
PALT-004 ABORT.G Increment value is ill
(Causa)
El valor de incremento de la pantalla de configuracin de paletizacin es ilegal.
(Solucin) Se ruega corregir el valor de incremento
PALT-005 ABORT.G Application item unfound
(Causa)
Error interno del software
(Solucin) Programar una instruccin de pal de nuevo.
PALT-006 ABORT.G Amr number is differnet
(Causa)
Error interno del software
(Solucin) Programar una instruccin de pal de nuevo.
PALT-007 ABORT.G Configulation not decided
(Causa)
La matriz de la columna/fila/capa de los datos iniciales de paletizacin es errnea.
(Solucin) Configurar la matriz de la columna/fila /capa de nuevo.
PALT-008 ABORT.G Route pattern duplicated
(Causa)
La configuracin de condicin del patrn de rutas coincide parcialmente.
(Solucin) Configurar la condicin en el patrn de ruta de nuevo.
-1389-
APENDICE D
B-82284ES-3/01
PALT-009 ABORT.G Bottom point unfound
(Causa)
El punto de amontonamiento correspondiente no existe.
(Solucin) Programar de nuevo el punto de amontonamiento.
PALT-010 ABORT.G Route pattern unfound
(Causa)
No ha sido encontrado la ruta del patron.
(Solucin) Comprobar el patrn de ruta en la pantalla de patrn de ruta de paletizacin.
PALT-011 ABORT.G Route point unfound
(Causa)
El punto de ruta correspondiente no existe.
(Solucin) Programar de nuevo el punto de ruta.
PALT-012 ABORT.G Route Bottom point unfound
(Causa)
No ha sido encontrado el punto de amontonamiento de un patrn de ruta actual.
(Solucin) Programar el punto de amontonamiento de un patrn de ruta actual.
PALT-013 ABORT.G Memory id error
(Causa)
La configuracin de los datos de paletizacin est incompleta.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-014 ABORT.G Illegal bottom number
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-015 ABORT.G Illegal pattern number
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-016 ABORT.G Illegal rout number
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1390-
APENDICE D
B-82284ES-3/01
PALT-017 ABORT.G Illegal current number
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-018 ABORT.G Illegal key input
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-019 ABORT.G Illegal point data
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-020 ABORT.G Function code unfound
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-021 ABORT.G Register index ill value
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-022 ABORT.G Item code cannot be found
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-023 ABORT.G Illegal element value
(Causa)
Error interno del software
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PALT-024 ABORT.G Calculation error occured
(Causa)
Los datos de paletizacin estn incompletos.
(Solucin) Programacin de todos como los puntos ms bajos?
Programacin de todos como puntos de ruta?
PALT-025 ABORT.G OS error occured
(Causa)
Error interno del software
PALT-026 ABORT.G Cannot read/write to PL[]
(Causa)
Error interno del software.
(Solucin) Comprobar el ndice de registro de paletizacin
PALT-027 ABORT.G Failed program close
(Causa)
Error interno del software
-1391-
APENDICE D
B-82284ES-3/01
PALT-028 ABORT.G Failed program open
(Causa)
Error interno del software
PALT-029 ABORT.G Not exist application data
(Causa)
Error interno del software
PALT-030 WARN Pallet number is over max
(Causa)
No programar la instruccin de paletizacin sobre 16
(Solucin) La instruccin de paletizacin no programar ms de 16 en este programa.
Programe otro programa.
PALT-031 WARN Can not be set FREE or INTER
(Causa)
En la configuracin libre FREE, no se puede configurar INTER sobre dos direcciones
(Solucin) En la configuracin FREE, se puede configurar INTER slo en una direccin
(ROW fila, COLUMN columna o LAYER capa)
PALT-033 This speed type isn't supported
(Causa)
La opcin de paletizacin no presta soporte a este tipo de velocidad
(Solucin) Se ruega seleccionar la otra instruccin de movimiento.
-1392-
APENDICE D
B-82284ES-3/01
D.2.8 Cdigos de error PROG
PROG-001 to 004 ABORT.L Invalid pointer is specified
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PROG-005 WARN Program is not found
(Causa)
No se puede encontrar el programa indicado.
(Solucin) Compruebe el nombre del programa.
PROG-006 WARN Line is not found
(Causa)
No se puede encontrar el nmero de lnea indicado.
(Solucin) Compruebe el nmero de lnea.
PROG-007 WARN Program is already running
(Causa)
El programa indicado ya se est ejecutando.
(Solucin) Compruebe el nombre del programa.
PROG-008 WARN In a rtn when creating a task
(Causa)
No se puede iniciar la ejecucin en un programa de subrutina.
(Solucin) Compruebe el nmero de lnea.
PROG-009 WARN Line not same rtn as paused at
(Causa)
Se ha intentado reanudar el programa en una lnea que no coincida con la lnea
interrumpida.
(Solucin) Compruebe el nmero de lnea.
PROG-010 WARN Not same prg as paused
(Causa)
Se ha intentado reanudar un programa diferente del programa interrumpido.
(Solucin) Compruebe el nombre del programa.
PROG-011 PAUSE.L Cannot get the motion control
(Causa)
No se puede obtener el control de movimiento.
(Solucin) Compruebe el interruptor de la consola de programacin y otros programas en ejecucin
para determinar los que tienen el control de movimiento.
-1393-
APENDICE D
B-82284ES-3/01
PROG-012 WARN All groups not on the top
(Causa)
El programa ha intentado reanudar un movimeinto que no coincida con el movimiento
interrumpido.
(Solucin) Reanude el movimiento interrumpido la ltima vez.
PROG-013 WARN Motion is stopped by program
(Causa)
Este movimiento se ha interrumpido mediante la instruccin MOTION PAUSE.
Slo se puede reanudar el movimiento con la instruccin del programa RESUME
MOTION.
(Solucin) Use la instruccin RESUME MOTION del programa.
PROG-014 WARN Max task number exceed
(Causa)
Ha intentado iniciar un nmero de programas superior al nmero mximo permitido.
(Solucin) Aborte los programas no necesarios.
PROG-015 WARN Cannot execute backwards
(Causa)
No se puede emplear la ejecucin hacia atrs.
(Solucin) No emplee la ejecucin hacia atrs en este punto.
PROG-016 WARN Task is not found
(Causa)
La tarea indicada no est en ejecucin o interrumpida.
(Solucin) Compruebe el nombre de la tarea.
PROG-017 WARN Task is not running
(Causa)
La tarea indicada no est en ejecucin.
(Solucin) Compruebe el nombre de la tarea.
PROG-018 ABORTG Motion stack overflowed
(Causa)
Hay demasiados programas interrumpidos.
(Solucin) Reanude o aborte algunos programas.
PROG-019 WARN Ignore pause request
(Causa)
Se ha ignorado la peticin de interrumpir el programa.
PROG-020 WARN Task is already aborted
(Causa)
El programa indicado ya se ha abortado.
(Solucin) Compruebe el nombre del programa.
-1394-
APENDICE D
B-82284ES-3/01
PROG-021 WARN Ignore abort request
(Causa)
Se ha ignorado la peticin de abortar el programa.
PROG-022 WARN Invalid request type
(Causa)
Error interno
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PROG-023 WARN Task is not paused
(Causa)
El programa indicado no est interrumpido.
(Solucin) Interrumpa el programa.
PROG-024 WARN Not have motion history
(Causa)
El historial de la trayectoria de movimiento se ha perdido.
(Solucin) No emplee la ejecucin hacia atrs en este punto.
PROG-025 WARN Cannot execute backwards
(Causa)
No se puede emplear la ejecucin hacia atrs.
(Solucin) No emplee la ejecucin hacia atrs en este punto.
PROG-026 WARN No more motion history
(Causa)
Ya no se puede emplear la ejecucin hacia atrs. La lnea actual ocupa el primer lugar
de la trayectoria memorizada.
PROG-027 to 033 WARN Invalid task number
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
PROG-034 WARN Routine not found
(Causa)
No se puede encontrar la rutina indicada.
(Solucin) Compruebe el nombre de la rutina y verifique que est cargada.
PROG-035 WARN Not locked the specified group
(Causa)
No se puede bloquear el control de movimiento para el grupo indicado.
(Solucin) Compruebe el interruptor de la consola de programacin y otros programas en ejecucin
para determinar los que tienen el control de movimiento.
-1395-
APENDICE D
B-82284ES-3/01
PROG-036 WARN The length of trace array is 0
(Causa)
No hay suficiente memoria disponible o el atributo de la tarea est incorrectamente
configurado.
(Solucin) Configurar la longitud del buffer usando el comando KCL SET TASK TRACELEN.
PROG-037 WARN No data in the trace array
(Causa)
No hay historial de ejecucin en la memoria.
(Causa)
Active el trazado con el comando KCL SET TRACE ON.
PROG-038 Inconsistency in task status
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
PROG-039 WARN locked, but not get mctl
(Causa)
El control de movimiento para el grupo indicado se ha reservado, pero no se puede
obtener.
(Solucin) Compruebe el interruptor de la consola de programacin y otros programas en ejecucin
para determinar los que tienen el control de movimiento.
PROG-040 PAUSE.L Already locked by other task
(Causa)
Otro programa ya ha reservado el control de movimiento para el grupo indicado se ha
reservado.
(Solucin) Compruebe los otros programas en ejecucin para determinar los que tienen el control
de movimiento.
PROG-041 WARN mctl denied because released
(Causa)
El control de movimiento est liberado. Actualmente la consola de programacin tiene
el control de movimiento. El robot no se puede arrancar hasta obtener el control de
movimiento.
(Solucin) Desactvie la consola de programacin.
PROG-042 WARN Already released
(Causa)
El control de movimiento ya estaba liberado
(Solucin) Si Ud. esperaba que la tarea deba haber liberado ya el grupo, puede que esto no sea un
error. De otro modo, comprobar el uso de UNLOCK_GROUP.
-1396-
APENDICE D
B-82284ES-3/01
PROG-043 WARN Already released by you
(Causa)
El control de movimiento ya estaba liberado a peticin de este programa.
(Solucin) Si Ud. esperaba que la tarea deba haber liberado ya el grupo, puede que esto no sea un
error. De otro modo, comprobar el uso de UNLOCK_GROUP.
PROG-044 WARN Arm has not been released yet
(Causa)
El control de movimiento an no estaba liberado.
(Solucin) Si Ud. esperaba que la tarea deba haber bloqueado ya el grupo, puede que esto no sea
un error. De otro modo, comprobar el uso de LOCK_GROUP.
PROG-045 WARN Other than requestor released
(Causa)
El control de movimiento ya estaba liberado a peticin de otro programa.
(Solucin) Si Ud. esperaba que otra tarea deba haber liberado ya el grupo, puede que esto no sea
un error. De otro modo, comprobar el uso de UNLOCK_GROUP.
PROG-046 PAUSE.L TP is enabled while running (%s^7)
(Causa)
La consola de programacin estaba activada mientras el programa estaba en ejecucin.
(Solucin) Desactive la consola de programacin y reanude el programa.
PROG-047 PAUSE.L TP is disabled while running (%s^7)
(Causa)
La consola de programacin estaba desactivada mientras el programa estaba en
ejecucin.
(Solucin) Activar la consola de programacin y usar shift-FWD para reanudar la ejecucin.
PROG-048 PAUSE.L Shift released while running (%s^7)
(Causa)
Se ha liberado la tecla shift mientras el programa estaba en ejecucin.
(Solucin) Mantenga pulsada la tecla shift y presione la tecla FWD para reanudar la ejecucin.
PROG-049 WARN Cannot release, robot moving
(Causa)
El control de movimiento no se puede liberar, porque el robot est en movimiento.
(Solucin) Compruebe el estado del movimiento del robot.
PROG-050 WARN Abort still in progress
(Causa)
El programa se encuentra en proceso de abortarse.
(Solucin) Espere unos segundos.
-1397-
APENDICE D
B-82284ES-3/01
PROG-051 WARN Cannot skip the return stmt
(Causa)
Las lneas indicadas para las que se intent un movimiento superan el nmero de lneas
del programa.
(Solucin) Compruebe el nmero de lnea.
PROG-052 ABORT.L Process is aborted while executing
(Causa)
Se ha obligado a abortar la tarea de aplicacin del usuario mientras se ejecutaba la
aplicacin.
(Solucin) Esto no requiere una accin especial del usuario.
PROG-053 ABORT.L User AX is not running
(Causa)
La tarea de la aplicacin del usuario no se ha ejecutado.
(Solucin) Inicie la tarea de la aplicacin del usuario antes de ejecutar la aplicacin.
PROG-054 FWD released while running (%s^7)
(Causa)
Se ha liberado la tecla FWD mientras el programa estaba en ejecucin.
(Solucin) Pulse las teclas FWD y shift para reanudar la ejecucin.
PROG-055 BWD released while running (%s^7)
(Causa)
Se ha liberado la tecla BWD mientras el programa estaba en ejecucin.
(Solucin) Pulse las teclas BWD y shift para reanudar la ejecucin.
PROG-056 Motion data out is enable
(Causa)
La funcin de bloqueo de la mquina est desactivada, y la funcin de salida de los datos
de movimiento est activada.
(Solucin) En la pantalla de ejecucin de prueba, desactive la funcin de salida de datos de
movimiento.
-1398-
APENDICE D
B-82284ES-3/01
D.2.9 Cdigos de error MACR (ID=57)
MACR-001 WARN no puede asignar una instruccin MACRO
(Causa)
Las condiciones para asignar macros no son correctas.
1. La definicin de ubicacin es duplicada.
2. El ndice est ms all del campo de ajuste.
(Solucin) Modifique la ubicacin del dispositivo.
MACR-003 WARN no puede asignar motn_prog a UK
(Causa)
No es posible asignar un programa con un grupo de bloqueo de movimiento a una tecla
de usuario (UK).
(Solucin) Elimine del programa el grupo de bloqueo de movimiento .
MACR-004 WARN No puede ejecutar motn_prog por UK
(Causa)
No se puede ejecutar un programa con un grupo de bloqueo de movimiento mediante la
tecla de usuario (UK).
(Solucin 1) 1Elimine todos los grupos de movimiento de la pantalla de grupo para obtener
informacin detallada del programa.
(Solucin 2) Asigne el programa a otros dispositivos (SU, SP, y MF).
MACR-005 WARN Por favor, activar la consola de programacin
(Causa)
No se puede ejecutar un programa cuando la consola de programacin est desactivada.
(Solucin) Active la consola de programacin.
MACR-006 WARN Por favor desactivar la consola de programacin
(Causa)
No se puede ejecutar un programa cuando la consola de programacin est activada.
(Solucin) Desactvie la consola de programacin.
MACR-007 WARN El mismo tipo de macro existe
(Causa)
El tipo de asignacin macro ya existe.
(Solucin) Cambie el tipo de asignacin.
MACR-008 WARN Condicin REMOTE no ha sido satisfecha
(Causa)
Este tipo de asignacin slo se activa con una condicin REMOTE.
(Solucin) Cree una condicin REMOTE.
MACR-009 WARN El ndice est fuera de rango
(Causa)
Este ndice de asignacin est fuera de rango.
(Solucin) Cambie el ndice de asignacin para que est dentro del rango vlido.
MACR-010 WARN Este botn SOP est desactivado
(Causa)
Este botn SOP est desactivado para ejecutar la macro.
(Solucin) Cambie el valor de la variable del sistema $MACRSOPENBL.
-1399-
APENDICE D
B-82284ES-3/01
MACR-011 WARN Este botn UOP est desactivado
(Causa)
Esta seal UOP est desactivada para ejecutar el macro.
(Solucin) Cambie el valor de la variable del sistema $MACRSUOPENBL.
MACR-012 WARN Nmero de DI+RI ha sido sobrepasado
(Causa)
El nmero de RI+DI ha sobrepasado la cifra mxima.
(Solucin) Primero elimine la asignacin de RI o DI.
Seguidamente asigne una nueva macro como RI o DI.
MACR-013 WARN MACRO ejecucin fallida
(Causa)
No se puede ejecutar esta MACRO.
(Solucin) Consulte el cdigo de causas de errores.
MACR-016 WARN El macro no ha sido completado
(Causa)
Se ha abortado la macro mientras estaba en ejecucin.
(Solucin) La macro se ejecutar desde la primera lnea en la siguiente ejecucin.
-1400-
APENDICE D
B-82284ES-3/01
D.2.10 Cdigos de error MEMO (ID=7)
MEMO-001 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-002 WARN Specified program is in use
(Causa)
Se est editando o ejecutando el programa especificado.
(Solucin) Salga de programa o abra otro programa y seleccinelo de nuevo ms tarde.
MEMO-003 WARN Specified program is in use
(Causa)
Se est editando o ejecutando el programa especificado.
(Solucin) Salga de programa o abra otro programa y seleccinelo de nuevo ms tarde.
MEMO-004 WARN Specified program is in use
(Causa)
Se est editando o ejecutando el programa especificado.
(Solucin) Salga de programa o abra otro programa y seleccinelo de nuevo ms tarde.
MEMO-006 WARN Protection error occurred
(Causa)
El programa especificado est protegido por un usuario.
(Solucin) Elimine la proteccin del programa.
MEMO-007 WARN Invalid break number
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-008 WARN Specified line no. not exist
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-009 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1401-
APENDICE D
B-82284ES-3/01
MEMO-010 WARN Program name error
(Causa)
El nombre del programa especificado es diferente del especificado en el archivo de de
cdigos P.
(Solucin) Especifique el mismo nombre de programa.
MEMO-011 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-012 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-013 WARN Program type is different
(Causa)
El tipo de programa especificado es diferente al del objeto que se est procesando.
(Solucin) Especifique el mismo tipo de programa.
MEMO-014 WARN Specified label already exists
(Causa)
La tiqueta de ID especificada ya existe en el programa.
(Solucin) Especifique otro nmero de etiqueta.
MEMO-015 WARN Program already exists
(Causa)
El programa especificado ya existe en el sistema.
(Solucin) Especifique el nombre del programa o borre el programa guardado.
MEMO-019 WARN Too many programs
(Causa)
El nmero de programas y funciones sobrepasa el mximo permitido (3200).
(Solucin) Elimine los programas y funciones innecesarios.
MEMO-020 to 024 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-025 WARN Label does not exist
(Causa)
La etiqueta especificada no existe.
(Solucin) Especifique el ndice con una etiqueta existente.
-1402-
APENDICE D
B-82284ES-3/01
MEMO-026 WARN Line data is full
(Causa)
El nmero de datos de lnea ha sobrepasado el nmero de lnea ms alto existente
(65535).
(Solucin) Elimine los datos de lnea innecesarios.
MEMO-027 WARN Specified line does not exist
(Causa)
No existen los datos de lnea especificados.
(Solucin) Especifique otro nmero de lnea.
MEMO-028 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-029 WARN The line data can't be changed
(Causa)
No se pueden cambiar los datos de lnea especificados. El tamao de los datos
modificados es diferente en la substitucin al de los datos originales.
(Solucin) Especifique otro nmero de lnea o otros datos con el mismo tamao.
MEMO-030 and 031 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-032 WARN Specified program is in use
(Causa)
Se est editando o ejecutando el programa especificado.
(Solucin) Salga de programa o abra otro programa y seleccinelo de nuevo ms tarde.
MEMO-034 WARN The item can't be changed
(Causa)
El elemento especificado est bloqueado por el sistema y no se puede modificar.
(Solucin) Seleccione otro elemento.
MEMO-035 to 037 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-038 WARN Too many programs
(Causa)
El nmero de programas ha sobrepasado el mximo permitido.
(Solucin) Elimine los programas innecesarios.
-1403-
APENDICE D
B-82284ES-3/01
MEMO-039 to 047 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-048 WARN Break point data doesn't exist
(Causa)
No existen los datos del punto de ruptura.
(Solucin) Especifique otro punto de ruptura.
MEMO-049 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-050 WARN Program does not exist
(Causa)
El programa especificado no existe en el sistema.
(Solucin) Especifique otro programa o cree primero el nuevo programa.
MEMO-051 to 055 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-056 WARN Program does not exist
(Causa)
El programa especificado no existe en el sistema.
(Solucin) Especifique otro programa o cree primero el nuevo programa.
MEMO-057 to 064 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-065 WARN Too many opened programs
(Causa)
Se estn utilizando demasiadas instrucciones de iniciacin.
El nmero de programas abiertos ha sobrepasado el mximo permitido (100).
(Solucin) Salga de los programas innecesarios o elimine las instrucciones de inciacin que no
necesite.
MEMO-066 and 067 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1404-
APENDICE D
B-82284ES-3/01
MEMO-068 WARN Specified program is in use
(Causa)
1. Se est editando o ejecutando el programa especificado.
2. El programa especificado est asociado a una MACRO.
(Solucin) 1. Salga de programa o abra otro programa y seleccinelo de nuevo ms tarde.
2. Retire el programa de la entrada MACRO.
MEMO-069 and 070 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-071 WARN Position does not exist
(Causa)
No existen los datos de posicin especificados.
(Solucin) Seleccione otra posicin.
MEMO-072 WARN Position data already exists
(Causa)
Ya hay datos de posicin en la entrada que ha especificado.
(Solucin) Indique otra posicin o elimine los datos de la posicin seleccionada.
MEMO-073 WARN Program does not exist
(Causa)
El programa especificado no existe en el sistema.
(Solucin) Especifique otro programa o cree primero el nuevo programa.
MEMO-074 WARN Program type is not TPE
(Causa)
Esta instruccin se puede ejecutar con los programas de la consola de programacin.
(Solucin) Seleccione un programa de la consola de programacin.
MEMO-075 WARN Program can't be used
(Causa)
Es necesario abrir el programa antes de intentar leerlo o modificarlo.
(Solucin) Abra el programa antes de intentar leerlo o modificarlo.
MEMO-076 to 077 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-078 WARN Program can't be used
(Causa)
La funcin seleccionada no es compatible con el tipo de programa.
(Solucin) Seleccione un programa cuyo tipo sea compatible con la funcin.
MEMO-079 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1405-
APENDICE D
B-82284ES-3/01
MEMO-080 WARN Protection error occurred
(Causa)
El programa especificado est protegido por un usuario.
(Solucin) Elimine la proteccin del programa.
MEMO-081 WARN Specified program is in use
(Causa)
Se est editando o ejecutando el programa especificado.
(Solucin) Salga de programa o abra otro programa y seleccione el primer de nuevo ms tarde.
MEMO-082 to 087 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-088 WARN Program does not exist
(Causa)
No existen los datos de posicin especificados.
(Solucin) Seleccione otra posicin.
MEMO-089 to 092 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-093 WARN Specified program is in use
(Causa)
Se est editando o ejecutando el programa especificado.
(Solucin) Salga de programa o abra otro programa y seleccione el primer de nuevo ms tarde.
MEMO-094 to 097 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-098 WARN EOF occurs in file access
(Causa)
Se ha dado un EOF al acceder al archivo.
El EOF se ha producido al escanear el cdigo P del archivo.
(Solucin) Puede que los datos del cdigo P estn daados.
Trasladar de nuevo del programa KAREL seleccionado.
Seguidamente, vuelva a carga el cdigo P.
MEMO-099 WARN Program name is wrong
(Causa)
La longitud del nombre del programa es diferente del especificado en los datos del
cdigo P.
(Solucin) Compruebe el nombre del programa.
-1406-
APENDICE D
B-82284ES-3/01
MEMO-100 to 102 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-103 WARN Check sum error occurred
(Causa)
Los datos especificados estn daados. ste es un error interno.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-104 WARN Program already exists
(Causa)
El programa especificado ya existe en el sistema.
(Solucin) Especifique otro nombre para el programa o borre el programa guardado.
MEMO-105 to 111 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-112 WARN Break data already exists
(Causa)
Los datos de ruptura especificados ya existen en el programa.
(Solucin) Especifique otro punto de ruptura.
MEMO-113 WARN File access error
(Causa)
No est conectado el puerto del programa que quiere cargar.
(Solucin) Compruebe la configuracin del puerto y el dispositivo conectado.
MEMO-114 WARN Break point can't be removed
(Causa)
No se pueden sobreescribir los datos del punto de ruptura porque estn protegidos por
un usuario o porque se estn utilizando.
(Solucin) Salga del programa o desactive su proteccin.
MEMO-115 WARN Break point can't be removed
(Causa)
No se pueden eliminar los datos del punto de ruptura porque estn protegidos por un
usuario o porque se estn utilizando.
(Solucin) Salga del programa o desactive su proteccin.
MEMO-116 to 118 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
-1407-
APENDICE D
B-82284ES-3/01
MEMO-119 WARN Application data doesn't exist
(Causa)
Los datos de apliacin especificados no existen porque el programa no se corresponde
con la apliacin.
(Solucin) Indique otros datos de apliacacin. Seguidamente, cree el programa en el sistema.
MEMO-120 WARN Application data doesn't exist
(Causa)
Los datos de apliacin especificados no existen porque el programa no se corresponde
con la apliacin.
(Solucin) Indique otros datos de apliacacin. Seguidamente, cree el programa en el sistema.
MEMO-121 to 122 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-123 WARN Application data doesn't exist
(Causa)
Los datos de apliacin especificados no existen porque el programa no se corresponde
con la apliacin.
(Solucin) Indique otros datos de apliacacin. Seguidamente, cree el programa en el sistema.
MEMO-124 WARN Program version is too new
(Causa)
La versin del programa KAREL es ms nueva que la del sistema.
(Solucin) Trazuca el programa con una versin ms antigua del traductor.
MEMO-125 WARN Program version is too old
(Causa)
La versin del programa KAREL es ms antigua que la del sistema.
(Solucin) Trazuca el programa con una versin ms nueva del traductor.
MEMO-126 WARN No more available memory
(Causa)
Falta memoria utilizable.
(Solucin) Elimine los programas innecesarios.
MEMO-127 WARN Pos reference over 255 times
(Causa)
La referencia a la misma posicin ha sobrepasado el recuento mximo (256).
(Solucin) Seleccione una nueva ID de posicin para la posicin sealada.
MEMO-128 WARN %s parameters are different
(Causa)
Hay un proceso en la memoria que tiene una definicin de parmetros diferente a la del
proceso de archivo PC que se est cargando.
(Solucin) Actualice la los parmetros de iniciacin que se estn cargando en el programa KAREL
o elimine los procesos obsoletos de la memoria del sistema.
-1408-
APENDICE D
B-82284ES-3/01
MEMO-129 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-130 SYSTEM Please power up again
(Causa)
Se han daado los datos de sistema en el CMOS.
(Solucin) Desconecte el robot y vuelvalo a conectar.
MEMO-131 SYSTEM Please power up again
(Causa)
Se han daado los datos de sistema en el CMOS.
(Solucin) Desconecte el robot y vuelvalo a conectar.
MEMO-132 WARN %s has been broken
(Causa)
Se han daado los datos del programa durante la recuperacin del fallo de alimentacin.
(Solucin) Elimine el programa y crelo de nuevo.
Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-133 SYSTEM Please power up again
(Causa)
Se han daado los datos de sistema en el CMOS.
(Solucin) Desconecte el robot y vuelvalo a conectar.
MEMO-134 WARN TPE program %s already exists
(Causa)
Ya existe un programa en la consla de programacin (TP) con el mismo nombre.
(Solucin) Elimine el programa de la consola de programacin (TP).
Seguidamente, cargue de nuevo el programa KAREL seleccionado.
MEMO-135 WARN Cannot create TPE program here
(Causa)
No se puede crear el programa en la consola de programacin con este modo de
arranque.
(Solucin) En el menu auxiliar, cambie el modo de arranque a arranque en fro o arranque
controlado 2.
MEMO-136 WARN Cannot load P-code here
(Causa)
No se puede cargar el programa KAREL con este modo de arranque.
(Solucin) Seleccione el men de funcin para cambiar el modo de arranque, o reinicie el robot.
MEMO-137 WARN Load at Control Start Only
(Causa)
No se puede cargar el programa KAREL seleccionado con este modo de arranque.
Ya se ha cargado un programa con el mismo nombre durante el arranque controlado.
(Solucin) Cargue el programa durante el arranque controlado.
MEMO-138 WARN Delete at Control Start Only
(Causa)
El programa seleccionado se ha cargado durante el arranque controlado.
Por ello, slo puede eliminar el programa desde el arranque controlado.
(Solucin) Elimine el programa durante el arranque controlado.
-1409-
APENDICE D
B-82284ES-3/01
MEMO-139 to 143 WARN System error
(Causa)
Error interno del sistema.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
MEMO-144 WARN Header size too big
(Causa)
El tamao del encabezado de la consola de programacin (TP) es demasiado grande.
Ha de ser menor de 256.
(Solucin) Cambie el tamao a un nmero comprendido entre 1 y 256.
Si fuera necesario, utilice varias entradas de memoria de la cabecera.
MEMO-145 TPE cannot have KAREL routine
(Causa)
Ya existe un programa KAREL con el mismo nombre, por lo tanto no se puede crear un
programa con el nombre especificado.
(Solucin) Cambie el nombre.
MEMO-146 Invalid variable is used
(Causa)
En el programa KAREL se incluye una variable no vlida.
(Solucin) Compruebe la variable del programa KAREL.
MEMO-147 Flash File access error(write)
(Causa)
No ha tenido xito el intento de grabar en el F-ROM.
Los datos del programa podran ser destruidos.
(Solucin) Puede que el F-ROM sea defectuoso.
MEMO-148 Flash File access error(read)
(Causa)
No ha tenido xito el intento de leer del F-ROM.
Los datos del programa podran ser destruidos.
(Solucin) Puede que el F-ROM sea defectuoso.
MEMO-149 Specified program is broken
(Causa)
Se han eliminado los datos del programa.
(Solucin) Compruebe el contenido del programa.
MEMO-151 No more available memory(TEMP)
(Causa)
La memoria temporal es insuficiente.
(Solucin) Elimine los programas innecesarios.
-1410-
APENDICE D
B-82284ES-3/01
D.2.11 Cdigos de error CMND
CMND-001 WARN Directory not found
(Causa)
No se puede encontrar el directorio indicado.
(Solucin) Compruebe el dispositivo y la trayectoria introducidos.
CMND-002 WARN File not found
(Causa)
No se pudo encontrar el directorio indicado.
(Solucin) Compruebe si el nombre del archivo est correctamente escrito y que existe.
Compruebe tambin que el nombre del dispositivo y la trayectoria sean correctos.
CMND-003 WARN File already exists
(Causa)
El archivo ya existe y no se ha podido sobreescribir.
(Solucin) Asegrese de que se ha indicado la opcin de sobreescritura.
CMND-006 WARN Self copy not allowed
(Causa)
No se puede copiar un archivo en el mismo archivo.
(Solucin) Cambie el nombre del archivo de destino para que sea diferente del archivo de origen.
CMND-009 WARN Position types are the same
(Causa)
Error interno
CMND-010 WARN Source type code is invalid
(Causa)
Error interno
CMND-011 WARN Destination type code is invalid
(Causa)
Error interno
CMND-012 WARN Type codes do not match
(Causa)
Error interno
CMND-013 WARN Representation mismatch
(Causa)
Error interno
CMND-014 WARN Positions are not the same
(Causa)
Error interno
CMND-015 WARN Both arguments are zero
(Causa)
Error interno
CMND-016 WARN Division by zero
(Causa)
Error interno
CMND-017 WARN Angle is out of range
(Causa)
Error interno
(Solucin) Asegrese de que el ngulo rotacional no es ms grande que 100 veces PI, o acerca de
314.15926######.
-1411-
APENDICE D
B-82284ES-3/01
CMND-018 WARN Invalid device or path
(Causa)
Ha indicado un dispositivo o trayectoria no vlido.
(Solucin) Compruebe el dispositivo y la trayectoria introducidos.
CMND-019 WARN Operation cancelled
(Causa)
Se ha cancelado la operacin al pulsar CTRL-C o CTRL-Y.
(Solucin) Repetir la operacin.
CMND-020 WARN End of directory
(Causa)
Ha concluido la enumeracin de directorios.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
CMND-021 WARN Cannot rename file
(Causa)
El nombre del archivo de destino contena caracteres alfanumricos y el carcter globla
'*'.
(Solucin) Cuando vuelva a nombrar un archivo, use nicamente caracteres alfanumricos en un
solo carcter global.
CMND-022 STOP.G Time motion with dist before
(Causa)
Un movimiento basado en tiempo fue especificado a lo largo con distancia
anteriormente.
(Solucin) No use estas opciones en combinaciones.
-1412-
APENDICE D
B-82284ES-3/01
D.2.12 Cdigos de error COND
COND-001 WARN Condition does not exist
(Causa)
El nmero del seguidor a activar, desactivar o eliminar est indicado, pero no se
encuentra.
(Solucin) Compruebe los nmeros de seguidor existentes e indique uno de ellos.
COND-002 WARN Condition handler superseded
(Causa)
El nmero de condicin indicado ya existe en el sistema y la nueva condicin lo ha
reemplazado.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
COND-003 WARN Already enabled, no change
(Causa)
La condicin indicada ya est activada. No se ha producido ningn cambio.
(Solucin) Esto es slo una notificacin, y no hace falta hacer nada para este mensaje de aviso.
COND-004 WARN Already disabled, no change
(Causa)
La condicin indicada ya est desactivada. No se ha producido ningn cambio.
(Solucin) Esto es slo una notificacin, y no hace falta hacer nada para este mensaje de aviso.
COND-009 WARN Break point encountered
(Causa)
Se ha encontrado un punto de ruptura.
(Solucin) No se necesita ninguna accin.
COND-010 WARN Cond exists, not superseded
(Causa)
La condicin indicada ya existe. La condicin no se ha reemplazado.
(Solucin) Renumerar el accionador de condicin o evitar la redefinicin del mismo accionador de
condicin.
COND-011 ABORT.G Scan time took too long
(Causa)
Demasiadas condiciones definidas. Llev demasiado tiempo escanearlas.
(Solucin) Reduzca el nmero de condiciones definidas.
-1413-
APENDICE D
B-82284ES-3/01
D.2.13 Cdigos de error DICT
DICT-001 WARN Dictionary already loaded
(Causa)
No se puede volver a cargar un diccionario si se ha cargado en FROM.
(Solucin) Cargue un idioma diferente y use KCL SET LANG para configurar el idioma.
DICT-002 WARN Not enough memory to load dict
(Causa)
Ya no hay memoria permanente disponible en el sistema para cargar otro diccionario.
(Solucin) Elimine todos los programas, diccionarios o variables que no necesite.
DICT-003 WARN No dict found for language
(Causa)
No hay diccionarios cargados para el idioma indicado.
(Solucin) Use el idioma por defecto o un idioma del que se haya cargado un diccionario.
DICT-004 WARN Dictionary not found
(Causa)
No se ha encontrado el diccionario indicado.
(Solucin) Use KCL LOAD DICT para cargar el diccionario en el idioma por defecto o el idioma
actual.
DICT-005 WARN Dictionary element not found
(Causa)
No se ha encontrado el elemento del diccionario.
(Solucin) Compruebe el diccionario o el nmero de elemento para asegurarse de que est
correctamente indicado.
DICT-006 WARN Nested level too deep
(Causa)
Slo se pueden categorizar cinco niveles de elementos de diccionario.
(Solucin) Configure el archivo de texto de diccionarios para incluir menos niveles categorizados.
DICT-007 WARN Dictionary not opened by task
(Causa)
No se ha abierto el diccionario en ningn momento.
(Solucin) Elimine la operacin de cierre.
DICT-008 WARN Dictionary element truncated
(Causa)
El elemento del diccionario se ha truncado porque la matriz de la secuencia KAREL no
es lo bastante grande para contener todos los datos.
(Solucin) Aumente el tamao de la secuencia o el nmero de secuencias de la matriz.
DICT-009 WARN End of language list
(Causa)
Se ha completado la lista de idiomas.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
DICT-010 WARN End of dictionary list
(Causa)
Se ha completado la lista de diccionarios.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
-1414-
APENDICE D
B-82284ES-3/01
DICT-011 WARN Dict opened by too many tasks
(Causa)
Slo se pueden abrir cinco diccionarios a la vez con una tarea.
(Solucin) Cargue los archivos de diccionario en la memoria F-ROM o C-MOS, donde no es
necesario procesar la apertura de archivos. Cierre los archivos de diccionarios no
utilizados.
DICT-012 WARN Low on FROM, loaded to memory
(Causa)
En FROM no hay suficiente memoria, as que el diccionario se ha cargado en CMOS.
(Solucin) Guarde los diccionarios en la memoria C-MOS.
DICT-013 WARN Cannot open dictionary file
(Causa)
El archivo de diccionario no existe en el dispositivo indicado o en el directorio indicado.
(Solucin) Seleccione el dispositivo/directorio adecuado y vuelva a intentarlo.
DICT-014 WARN Expecting $ in dictionary file
(Causa)
El texto del diccionario indica incorrectamente un elemento sin $.
(Solucin) Asegrese de que todos los elementos de diccionario empiecen con $.
DICT-015 WARN Reserved word not recognized
(Causa)
No se ha reconocido una palabra reservada en el texto del diccionario.
(Solucin) Compruebe si hay alguna palabra mal escrita o busque la palabra correcta en el Manual
de referencia KAREL.
DICT-016 WARN Ending quote expected
(Causa)
El texto del diccionario indica incorrectamente un elemento sin comillas.
(Solucin) Asegrese de que todo el texto del diccionario est rodeado de comillas dobles.
Si quiere que aparezcan comillas reales en el texto use una barra.
Por ejemplo, si escribe "This is an example " el texto resultante ser "This is an
example"
DICT-017 WARN Expecting element name or num
(Causa)
Se espera una referencia a otro elemento.
(Solucin) Use el nmero del elemento para referenciar el elemento.
DICT-018 WARN Invalid cursor position
(Causa)
La posicin del cursor se est incorrectamente indicada o los valores estn fuera de los
lmites.
(Solucin) Asegrese de que la posicin del cursor sea vlida. Por ejemplo, use @1,1 para la
primera fila y columna respectivamente.
DICT-019 WARN ASCII character code expected
(Causa)
Se espera una serie de dgitos despus de # para indicar un cdigo de caracteres ASCII.
(Solucin) Elimine # o consulte el cdigo de caracteres ASCII en el Manual de referencia KAREL.
DICT-020 WARN Reserved word expected
(Causa)
Se espera un identificador despus de & para indicar una palabra reservada.
(Solucin) Elimine & o consulte la palabra reservada en el Manual de referencia KAREL.
-1415-
APENDICE D
B-82284ES-3/01
DICT-021 WARN Invalid character
(Causa)
Se ha encontrado un carcter inesperado en el archivo de texto del diccionario.
(Solucin) Asegrese de que todo el texto del diccionario sea correcto.
DICT-022 WARN Dict already opened by task
(Causa)
La tarea ya ha abierto el diccionario.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
DICT-023 WARN Dict does not need to be opened
(Causa)
No es necesario abrir los diccionarios cargados en la memoria.
(Solucin) No intente abrir el archivo de diccionario.
DICT-024 WARN Cannot remove dictionary file
(Causa)
Los diccionarios cargados desde FROM no se pueden eliminar o un diccionario no se
puede eliminar si otra tarea lo tiene abierto.
(Solucin) No intente eliminar un diccionario cargado en FROM.
Elimine el diccionario de la misma tarea que lo carg.
DICT-025 Invalid state - internal error
(Causa)
Escaneado incorrecto.
(Solucin) Corrija el texto del diccionario.
DICT-028 WARN No FROM write, loaded to memory
(Causa)
En FROM no hay suficiente memoria, as que el diccionario se ha cargado en CMOS
para R-J.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
DICT-029 WARN Help element not found
(Causa)
No se ha encontrado el elemento de ayuda del diccionario.
(Solucin) Consulte el diccionario para asegurarse de que el elemento de ayuda del diccionario se
ha indicado correctamente. El elemento de ayuda del diccionario se debe indicar con un
interrogante (?) seguido del nmero de elemento.
DICT-030 WARN Function key element not found
(Causa)
No se ha encontrado el elemento del diccionario de teclas de funcin.
(Solucin) Consulte el diccionario para asegurarse de que el elemento del diccionario de teclas de
funcin se ha indicado correctamente. El elemento de teclas de funcin se debe indicar
con un signo de intercalacin (^) seguido del nmero de elemento.
-1416-
APENDICE D
B-82284ES-3/01
D.2.14 Cdigos de error LANG
LANG-004 WARN File is not open
(Causa)
1 Un archivo con el mismo nombre ya existe.
2 El archivo especificado ha sido abierto anteriormente.
3 El archivo est protegido contra escritura.
4 Cuando un disquete es usado, no tiene espacio libre.
(Solucin) 1 Borrar cualquier archivo innecesario, o renombrar el archivo.
2 Cerrar el archivo.
3 Cancelar la poteccin contra escritura.
4 Usar un disquete nuevo. O borre los archivos que no necesite del disquete existente
para crear suficiente espacio libre para guardar el archivo.
LANG-005 WARN Program type is different
(Causa)
Slo se pueden procesar programas de la consola de programacin.
(Solucin) Seleccione un programa de la consola de programacin.
LANG-006 Invalid or corrupted TP file
(Causa)
No se pueden leer correctamente los datos de un archivo de programa.
(Solucin) Comprobra la configuracin del puerto.
Comprobar la configuracin del archivo porttil.
Comprobra el disquete o la conexin de la trjeta de memoria.
Si las comprobaciones de arriba no pueden corregir el error, los datos del archivo
pueden ser destrudos.
LANG-007 System Error
(Causa)
No se pueden leer correctamente los datos de un archivo de programa.
(Solucin) Comprobra la configuracin del puerto.
Comprobar la configuracin del archivo porttil.
Comprobra el disquete o la conexin de la trjeta de memoria.
Si las comprobaciones de arriba no pueden corregir el error, los datos del archivo
pueden ser destrudos.
LANG-014 WARN Program already exists
(Causa)
El programa que se dispone a cargar ya existe en el sistema.
(Solucin) Antes de cargarlo, borre el programa que ya existe en el sistema.
LANG-015 WARN Can not write file
(Causa)
1 El archivo est protegido contra escritura.
2 Los datos del tamao especificado no pudieron ser escritos.
(Solucin) 1 Cancelar la proteccin contra escritura.
2 El disco puede estar mal. Cambie el disquete.
LANG-016 WARN Can not read file
(Causa)
No se han podido leer los datos del tamao indicado.
Se ha producido un error en la comunicacin de datos.
(Solucin) Compruebe la conexin del dispositivo.
-1417-
APENDICE D
B-82284ES-3/01
LANG-017 WARN File format is incorrect
(Causa)
Los datos que intenta guardar en un archivo son incorrectos o defectuosos, as que no se
puede cargar el archivo.
(Solucin) No se puede cargar el archivo con estos datos.
Para cargar el archivo, los datos deben ser correctos.
LANG-018 WARN Group mask value is incorrect
(Causa)
Al imprimier el programa, haba una posicin no aceptada que no coincida con la
pantalla de grupo del programa.
(Solucin) Vuelva a programar los datos de posicin para que el nmero de grupo coincida con la
pantalla de grupo del programa.
LANG-050 WARN %s contains %s, program/file names must match
(Causa)
El nombre del programa y el del archivo no coinciden. Deben coincidir.
(Solucin) Vuelva a nombrar el archivo para que coincida con el nombre del programa.
LANG-094 WARN File already exists
(Causa)
El archivo indicado ya existe en el disquete.
(Solucin) Antes de escribir el nuevo archivo en el disquete, elimine el archivo que ya existe en el
disquete.
LANG-095 WARN File does not exist
(Causa)
El archivo indicado no existe en el disquete.
(Solucin) Compruebe el nombre o el contenido del archivo del disquete.
LANG-096 WARN Disk is full
(Causa)
El disquete ha alcanzado el lmite y est lleno.
(Solucin) Use un nuevo disquete o elimine todos los archivos que no necesiten para que haya
espacio en el disquete.
LANG-098 WARN Disk timeout
(Causa)
No se ha podido acceder al disco.
(Solucin) Compruebe si el dispositivo correcto est configurado en el puerto y si se pone en
funcionamiento.
LANG-099 WARN Write protection violation
(Causa)
El disco est protegido contra escritura.
(Solucin) Cancele la proteccin contra escritura.
LANG-100 WARN Device error
(Causa)
No se ha podido acceder al dispositivo.
(Solucin) Conecte el dispositivo correcto al puerto correcto.
-1418-
APENDICE D
B-82284ES-3/01
D.2.15 Cdigos de error MCTL
MCTL-001 NONE TP is enabled
(Causa)
La consola de programacin est activada sin que se haya facilitado control de
movimiento.
(Solucin) Desactive la consola de programacin y vuelva a intentar la operacin.
MCTL-002 NONE TP is disabled
(Causa)
La consola de programacin est desactivada sin que se haya facilitado control de
movimiento.
(Solucin) Active la consola de programacin y vuelva a intentar la operacin.
MCTL-003 NONE system is in error status
(Causa)
No se ha facilitado el control de movimiento proque el sistema se halla en estado de
error.
(Solucin) Elimine el error y vuelva a intentar la operacin.
MCTL-004 NONE motion is in progress
(Causa)
El movimiento todava est en ejecucin y no se ha facilitado control de movimiento.
(Solucin) Espere a que el robot se detenga completamente.
MCTL-005 NONE not in control of motion
(Causa)
No se ha facilitado control de movimiento por alguna razn desconocida.
(Solucin) Elimine la causa y vuelva a intentar la operacin.
MCTL-006 NONE TP has motion control
(Causa)
No se ha facilitado control de movimiento porque actualmente la consola de
programacin tiene control de movimiento.
(Solucin) Desactive la consola de programacin e intntelo de nuevo.
MCTL-007 NONE PROG has motion control
(Causa)
No se ha facilitado control de movimiento porque el programa tiene control de
movimiento.
(Solucin) Interrumpa o aborte el programa y vuelva a intentar la operacin.
MCTL-008 NONE Operator panel has motion control
(Causa)
No se ha facilitado control de movimiento porque el panel del operador tiene el control
de movimiento.
(Solucin) Configure correctamente la variable del sistema $RMT_MASTER y vuelva a intentar
la operacin.
MCTL-009 NONE Other has motion control
(Causa)
Otro dispositivo tiene control de movimiento, y no se ha facilitado control de
movimiento.
(Solucin) Configure correctamente la variable del sistema $RMT_MASTER y vuelva a intentar
la operacin.
-1419-
APENDICE D
B-82284ES-3/01
MCTL-010 Other than msrc is rel'ing
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MCTL-011 Due to error processing
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MCTL-012 subsystem code unknown
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
MCTL-013 NONE ENBL input is off
(Causa)
La entrada de ENBL est desconectada.
(Solucin) Active la entrada de ENBL.
MCTL-014 NONE Waiting for Servo ready
(Causa)
No se ha facilitado control de movimiento porque el servo no estaba activado.
(Solucin) Espere unos segundos hasta que el servo est activado y preparado.
MCTL-015 NONE Manual brake enabled
(Causa)
No se ha facilitado control de movimiento porque el control del freno manual est
activado.
(Solucin) Desactive el control del freno manual.
-1420-
APENDICE D
B-82284ES-3/01
D.2.16 Cdigos de error PRIO
PRIO-001 WARN Illegal iotype
(Causa)
El tipo de puerto indicado no es vlido.
(Solucin) Use uno de los tipos de puerto definidos en IOSETUP.KL.
PRIO-002 WARN Illegal index
(Causa)
El nmero de puerto no es vlido o actualmente no est asignado.
(Solucin) Corrija el nmero de puerto.
PRIO-003 SYST No memory available
(Causa)
La memoria necesaria para esta operacin no est disponible.
(Solucin) Elimine los programas KAREL y/o las variables para liberar memoria.
PRIO-004 WARN Too few ports on mod too few ports on mod
(Causa)
No hay suficientes puertos en el tablero o mdulo indicado para efectuar las
asignaciones indicadas.
(Solucin) Corrija el nmero del primer puerto o el nmero de puertos.
PRIO-005 WARN bad logical port no
(Causa)
El nmero de puerto indicado en una asignacin no es vlido.
Debe ser de entre 1y 32767.
(Solucin) Corrija el nmero de puerto lgico para que est dentro del rango vlido.
PRIO-006 WARN bad log port number in asgt
(Causa)
El nmero de puerto indicado en una asignacin no es vlido.
Debe ser de entre 1y 32767.
(Solucin) Corrija el nmero de puerto lgico para que est dentro del rango vlido.
PRIO-007 WARN no match in deassign call
(Causa)
El puerto que se est dejando de asignar no est actualmente asignado.
(Solucin) Corrija el nmero de puerto.
PRIO-008 WARN phys ports not found
(Causa)
El puerto fsico de asignacin no existe.
(Solucin) Corrija el nmero de columna, el nmero de ranura o el nmero de puerto.
PRIO-009 WARN n_ports invalid
(Causa)
El nmero de puertos de una asignacin no es vlido. Debe ser de entre 1 - 128.
(Solucin) Corrija el nmero de puertos para que est dentro del rango vlido.
PRIO-010 WARN bad phys port number is asgt
(Causa)
Hay un nmero de puerto fsico no vlido en la peticin de asignacin.
Debe ser mayor de 1.
(Solucin) Corrija el nmero de puerto fsico para que sea mayor de 1.
-1421-
APENDICE D
B-82284ES-3/01
PRIO-011 WARN asgt overlaps existing asgt
(Causa)
Los nmeros de puerto lgicos que se asignan se solapan con las asignaciones
existentes.
(Solucin) Corrija el nmero del primer puerto o el nmero de puertos.
PRIO-012 WARN bad board num
(Causa)
El nmero de columna y/o ranura indicado no es vlido o se refiere a un nmero de
columna/ranuara que no se usa.
(Solucin) Corrija el nmero de columna y/o ranura.
PRIO-013 WARN no aiseq for bd
(Causa)
Se ha intentado eliminar una secuencia de entrada analgica no definida.
(Solucin) Compruebe el nmero de columna y/o ranura.
PRIO-014 WARN ai seq too long
(Causa)
La secuencia de entrada analgica es demasiado larga.
La secuencia tiene entre 1 y 15 nmeros de puerto.
(Solucin) Introduzca una secuencia de longitud apropiada.
PRIO-016 WARN log port already asgnd
(Causa)
El nmero lgico indicado ya est en uso.
(Solucin) Use otro nmero lgico.
PRIO-017 WARN I/O point not sim I/O point not sim
(Causa)
Ha intentado configurar un puerto de entrada no simulado.
(Solucin) Use el men de E/S para configurar el puerto simulado o no configure el puerto.
PRIO-020 SYST SLC communications error %d %d %d %d
(Causa)
Se ha detectado un error irrecuperable en la comunicacin con la tarjeta de E/S de
proceso.
(Solucin) Compruebe el cable que hay entre la tarjeta de unidad de circuito impresa y la unidad
de E/S.
Compruebe la SLC2 de la tarjeta de unidad de circuito impresa principal o la unidad de
E/S.
PRIO-021 Unknown I/O hardware
(Causa)
Hay un dispositivo desconocido conectado al conector de conexin de la E/S.
(Solucin) Sustituya el dispositivo por otro compatible con el software actual o instale una versin
de software que reconozca el dispositivo.
PRIO-022 Too much I/O data on I/O link
(Causa)
Los dispositivos conectados a la conexin de E/S superan la capacidad de la conexin
de E/S.
(Solucin) Desconecte algunos dispositivos.
PRIO-023 WARN no ports of this type
(Causa)
No hay puertos del tipo indicado.
(Solucin) Cambie el tipo de puerto o defina puertos (v.g., GIN o GOUT) del tipo indicado.
-1422-
APENDICE D
B-82284ES-3/01
PRIO-032 WARN too many DIO modules
(Causa)
Hay ms de 31 unidades de E/S conectadas mediante una conexin de E/S.
(Solucin) Desconecte algunas de las unidades de E/S para que no hay ms de 31 conectadas.
PRIO-063 WARN Bad IO asg: rack% d^1 slot %d^2
(Causa)
No se encuentra la unidad de E/S a la que se ha asignado una seal.
Ninguna unidad de E/S corresponde a los nmeros de columna y ranura posteriores al
mensaje de alarma.
Las causas posibles son:
(1) Se ha cambiado la unidad de E/S por otro tipo de unidad de E/S.
(2) Se ha fundido el fusible de la unidad de E/S.
(3) La unidad de E/S no tiene alimentacin.
(4) El cable de conexin de E/S est desconecatdo o no est firmemente conectado.
(5) El cable de conexin de E/S est roto.
(6) La unidad de E/S es defectuosa.
(Solucin) (1) Si se ha cambiado la unidad de E/S, siga este procedimiento para eliminar la
ubicacin de la E/S.
1 Pulsar el MENU y seleccionar I/O.
A continuacin, pulse F1 (TYPE) y seleccione I/O LINK para ver la pantalla de
conexin de E/S.
2 Pulsar F5 (INTER CONNECT).
3 Para responder al mensaje "RECOVER ALL," pulse F4 (YES).
4 Apagar y volver a encender.
En este caso, cuando est activada la recuperacin de potencia, todas las seales de
entrada estn desconectadas.
(2) Cambie el fusible de la unidad de E/S.
(3) Compruebe la alimientacin de la unidad de E/S.
((4) Asegrese de que el cable de conexin de la E/S est bien conectado.
(5) Cambie el cable de la unidad de E/S.
(6) Cambie la unidad de E/S.
PRIO-072 WARN Pulse output is full
(Causa)
Puede haber hasta 255 impulsos a la vez.
(Solucin) Compruebe el contaje de pulsos.
PRIO-081 I/O is not initialized
(Causa)
Indica que se ha producido un error grave durante la inicializacin de la E/S o al
conectar el controlador.
(Solucin) Compruebe si hay otros mensajes de error en la pantalla de alarma de la consola de
programacin.
-1423-
APENDICE D
B-82284ES-3/01
PRIO-083 Digital I/O is not recovered
(Causa)
Los estados de los puertos de salida digital no se recuperan al activar el arranque en
caliente porque se ha cambiado la configuracin del dispositivo de E/S o las
asignaciones.
(Solucin) Inicialize la E/S.
PRIO-085 BUSY in SLC2 does not turn off
(Causa)
El bit BUSY de SLC2 no se desconecta.
(Solucin) Compruebe SLC2 en la tarjeta de circuito impresa principal o el dispositivo de E/S y el
cable de conexin de la E/S.
PRIO-100 Model B comm fault %srack:%d slot:%d
(Causa)
Se ha perdido la comunicacin entre la unidad de interfaz Modelo B y las unidades
DI/DO, o entre las unidades DI/DO.
(Solucin) Compruebe la potencia y el cableado de la unidad de interfaz modelo B y la unidad
DI/DO o entre las unidades DI/DO.
PRIO-119 Too many DIGITAL I/O ports
(Causa)
Demasiados puertos de E/S DIGITAL.
(Solucin) Desconecte algunos dispositivos de E/S DIGITAL.
PRIO-125 SLC2 initialization error
(Causa)
SLC2 es un estado de error al final de la inicializacin.
(Solucin) Compruebe SYSFAIL del otro PCB.
Compruebe tambin el PCB principal.
-1424-
APENDICE D
B-82284ES-3/01
D.2.17 Cdigos de error ROUT
ROUT-022 PAUSE.G Bad index in ORD
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
ROUT-023 PAUSE.G Bad index in SUBSTR
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
ROUT-024 PAUSE.G SUBSTR length less than 0
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
ROUT-025 ABORT.G Illegal semaphore number
(Causa)
Se ha indicado un nmero incorrecto para identificador de usuario del semforo.
(Solucin) Indique un nmero entre 1 y 255.
ROUT-026 WARN Illegal group number
(Causa)
Se ha indicado un nmero de grupo no vlido.
(Solucin) Indique un nmero de grupo existente.
ROUT-027 WARN String size not big enough
(Causa)
En la variable de la secuencia no hay suficiente espacio para los datos
(Solucin) Indique una variable de retorno mayor.
ROUT-028 ABORT.G Illegal file attribute number
(Causa)
Se ha indicado un identificador de usuario de atributo de archivo incorrecto.
(Solucin) Indique un identificador de usuario de atributo de archivo correcto.
ROUT-029 ABORT.G Illegal file attribute value
(Causa)
Se ha indicado un valor de atributo de archivo incorrecto.
(Solucin) Indique un valor de atributo correcto.
ROUT-030 WARN Non existent register number
(Causa)
Se ha indicado un nmero de registro que no existe.
(Solucin) Indique un nmero de registro correcto.
ROUT-031 WARN Illegal register type
(Causa)
Se ha indicado un tipo de registro incorrecto.
(Solucin) Indique el tipo de registro correcto para la operacin que desee.
ROUT-032 ABORT.G Position type mismach
(Causa)
El tipo de posicin no es correcto para la operacin.
(Solucin) Indique un tipo de posicin correcto.
-1425-
APENDICE D
B-82284ES-3/01
ROUT-033 ABORT.G Illegal attribute type
(Causa)
Se ha indicado un identificador de usuario de atributo no permitido.
(Solucin) Indique un un identificador de usuario de atributo correcto.
ROUT-034 WARN Not a TPE program
(Causa)
Se ha indicado un programa que no es de la consola de programacin.
(Solucin) Indique un programa que no sea KAREL.
ROUT-035 WARN Value is out of range
(Causa)
Error interno de software.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
ROUT-037 ABORT.G Bad TPE header size
(Causa)
El valor empleado en SET_HEAD_TPE for bfr_size no es vlido.
(Solucin) Use un tamao de circuito intermedio de entre 1 y 255.
ROUT-038 PAUSE.G Uninitialized TPE position
(Causa)
Indica que los datos de posicin de la lnea indicada del programa de la consola de
programacin indicado no se han grabado.
(Solucin) Confirme el contenido de los datos de posicin.
ROUT-039 WARN Executing motion exists
(Causa)
No se puede desbloquear un grupo mientras se ejecuta un movimiento.
(Solucin) Espere hasta que finalice el movimiento.
ROUT-040 WARN Stopped motion exists
(Causa)
No se puede desbloquear un grupo mientras haya un movimiento detenido.
(Solucin) Reanude el movimiento detenido y espere a que se complete el movimiento o cancele
el movimiento detenido.
ROUT-041 Dym. disp. var. not static
(Causa)
Error interno del sistema.
(Solucin) Consulte a nuestro representante de asistencia tcnica.
ROUT-042 TPE parameters do not exist
(Causa)
El parmetro designado mediante param_no no existe.
(Solucin) Confirme param_no y el parmetro del comando CALL/MACRO en el programa del
TPE principal.
-1426-
APENDICE D
B-82284ES-3/01
D.2.18 Cdigos de error SCIO
SCIO-001 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-002 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-003 out buffer size is not enough
(Causa)
Error interno del sistema.
SCIO-004 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-005 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-006 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-007 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-008 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
-1427-
APENDICE D
B-82284ES-3/01
SCIO-009 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-010 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-011 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-012 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-013 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-014 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-015 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-016 WARN This option does not exist
(Causa)
Esta opcin no existe.
(Solucin) Confirme la opcin adquirida.
-1428-
APENDICE D
B-82284ES-3/01
SCIO-017 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-018 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-019 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-020 WARN LBL[%d] exists in line %d:
(Causa)
Este nmero de etiqueta existe en otra lnea.
(Solucin) Seleccione otro nmero de etiqueta.
SCIO-021 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-022 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-023 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
SCIO-024 System Error
(Causa)
Error interno
(Solucin) Pngase en contacto con su representante de FANUC e infrmele de la aparicin del
mensaje de alarma.
-1429-
APENDICE D
B-82284ES-3/01
SCIO-030 JOINT motion in slave program
(Causa)
El programa de ejecucin del esclavo nico y la conexin del programa esclavo del
robot no puede emplear una instruccin de movimiento articular.
(Solucin) Para programar, use una instruccin de movimiento lineal o circular.
SCIO-031 JOINT position in slave program
(Causa)
El programa de ejecucin del esclavo nico y la conexin del programa esclavo del
robot no puede emplear el formato de posicin articular para los datos de posicin de la
instruccin de movimiento.
(Solucin) Use el formato de posicin ortogonal.
SCIO-032 Master UT mismatch
(Causa)
El nmero del sistema de coordenadas de la herramienta actual del robot principal no
coincide con el nmero del sistema de coordenadas de la herramienta indicado en la
pantalla de datos del programa.
(Solucin) Modifique el el nmero del sistema de coordenadas de la herramienta del robot
principal.
Tambin puede modificar el nmero del sistema de coordenadas de la herramienta del
robot principal en la pantalla de datos del programa.
SCIO-033 Slave can have ony one motion line
(Causa)
El programa esclavo de la conexin del robot permite programar nicamente una lnea
de instrucciones de movimiento.
(Solucin) Asegrese de que el programa esclavo contiene slo una lnea de instrucciones de
movimiento.
-1430-
APENDICE D
B-82284ES-3/01
D.2.19 Cdigos de error SRIO
SRIO-002 SERIAL PORT NOT OPEN
(Causa)
El puerto de serie no est abierto.
(Solucin) Abra el puerto de serie antes de emplearlo.
SRIO-003 SERIAL PORT ALREADY OPEN
(Causa)
Ya se ha abierto el puerto de serie y se ha intentado reabrirlo.
(Solucin) No intente abrir un puerto de serie que ya se ha abierto.
SRIO-004 SERIAL PORT NOT INITIALIZE
(Causa)
El puerto de serie no est inicializado.
(Solucin) Inicialice el puerto de serie antes de emplearlo.
SRIO-005 SERIAL PORT DSR OFF
(Causa)
El puerto de serie DSR est desconectado.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
Compruebe el estado del dispositivo de destino.
SRIO-006 SERIAL PORT PARITY ERROR
(Causa)
Se ha producido un error de paridad del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
SRIO-007 SERIAL PORT OVERRUN ERROR
(Causa)
Se ha producido un error de exceso del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
SRIO-008 SERIAL PORT FRAME ERROR
(Causa)
Se ha producido un error de trama del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
SRIO-009 S. PORT PARITY & OVERRUN
(Causa)
Se han producido un error de paridad y un error de exceso del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
-1431-
APENDICE D
B-82284ES-3/01
SRIO-010 S. PORT PARITY & FRAME
(Causa)
Se han producido un error de paridad y un error de trama del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
SRIO-011 S. PORT OVERRUN & FRAME
(Causa)
Se han producido un error de exceso y un error de trama del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
SRIO-012 S. PORT PRTY & OVRRN & FRM
(Causa)
Se han producido un error de paridad y un error de trama del puerto de serie.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
SRIO-013 S. PORT DSR OFF & HARDWARE ERR
(Causa)
El DSR del puerto de serie est desconectado y se ha producido un error de harware.
(Solucin) Compruebe si la configuracin del puerto de serie es correcta.
Compruebe si el cable est roto.
Compruebe si hay alguna fuente de ruido cerca del controlador.
Compruebe el estado del dispositivo de destino.
Comprobar el hardware.
-1432-
APENDICE D
B-82284ES-3/01
D.2.20 Cdigos de error FLPY
FLPY-001 End of directory reached
(Causa)
Su enumeracin ha llegado al final del directorio.
(Solucin) Es slo informacin. No tiene que hacer nada respecto a este mensaje de advertencia.
FLPY-002 File already exists
(Causa)
El nombre del archivo que intenta crear ya existe en este dispositivo.
(Solucin) Elimine el archivo de este nombre o escoja otro nombre de archivo.
FLPY-003 File does not exist
(Causa)
El archivo que intenta abrir no existe en este dispositivo.
(Solucin) Abra un archivo que exista en el dispositivo.
FLPY-004 Unsupported command
(Causa)
La operacin no es compatible en el disquete.
(Solucin) Use slo operaciones compatibles en el disquete.
FLPY-005 Disk is full
(Causa)
Se ha agotado la capacidad del disquete.
(Solucin) Elimine archivos que no necesite o emplee un disquete con suficiente espacio libre.
FLPY-006 End of file reached
(Causa)
Se ha alcanzado el fin del archivo durante la lectura.
(Solucin) No intente leer ms all del fin de un archivo.
FLPY-008 Only one file may be opened
(Causa)
Se ha intentado abrir ms de un archivo.
(Solucin) No intente abrir ms de un archivo a la vez.
FLPY-009 Communications error
(Causa)
El formato de protocolo no era vlido.
(Solucin) Vuelva a intentar la operacin.
FLPY-015 Write protection violation
(Causa)
El disco est protegido contra escritura.
(Solucin) Elimine la proteccin contra escritura del disquete o utilice uno que no est protegido
contra escritura.
FLPY-100 Directory read error
(Causa)
La informacin del directorio est estropeada e ilegible.
(Solucin) Pruebe con otro disco o reformatee el disco.
-1433-
APENDICE D
B-82284ES-3/01
FLPY-101 Block check error
(Causa)
Los datos de la suma de comprobacin no son vlidos.
Los datos del disco estn estropeados y no se pueden leer.
(Solucin) Pruebe con otro disco o reformatee el disco.
FLPY-103 Seek error
(Causa)
Hay una zona o pista defectuosa en el disco.
(Solucin) Limpie la unidad del disco, pruebe con otro disco o vuelva a formatear el disco.
FLPY-104 Disk timeout
(Causa)
La unidad no ha respondido a un comando.
(Solucin) Compruebe el cable de a unidad y asegrese de que la potencia de la unidad est
conectada.
FLP-105 Write protection violation
(Causa)
El disco est protegido contra escritura.
(Solucin) Elimine la proteccin contra escritura del disquete o utilice uno que no est protegido
contra escritura.
FLPY-106 Memory Card hardware error
(Causa)
Se ha detectado un error en el hardware de la tarjeta de memoria.
(Solucin) Compruebe la unidad de I/F o la batera de la tarjeta de memoria.
FLPY-107 Not formatted card
(Causa)
La tarjeta de memoria no est formateada.
(Solucin) Formatee la tarjeta con el men UTILITY de la pantalla FILE.
-1434-
APENDICE D
B-82284ES-3/01
D.2.21 Cdigos de error FILE
FILE-001 Device not ready
(Causa)
El dispositivo de archivo indicado no est listo.
(Solucin) Compruebe si el dispositivo est montado y listo para usarse.
FILE-002 Device is Full
(Causa)
El dispositivo est lleno. Ya no queda espacio para almacenar los datos en el dispositivo.
(Solucin) Elimine todos los archivos innecesarios o cambie el dispositivo.
FILE-003 Device is protected
(Causa)
El dispositivo est protegido. Por lo tanto, no puede escribir en el dispositivo.
(Solucin) Libere la proteccin del dispositivo.
FILE-005 Device not mounted
(Causa)
El dispositivo no est montado. Antes de usar el dispositivo, debe montarlo.
(Solucin) Monte el dispositivo de archivo correcto.
FILE-006 Device is already mounted
(Causa)
Ha intentado montar un dispositivo ya montado.
(Solucin) Monte el dispositivo slo una vez.
FILE-008 Illegal device name
(Causa)
El nombre del dispositivo contiene un carcter no permitido.
(Solucin) Compruebe si el nombre del dispositivo est bien escrito y si es vlido.
FILE-009 Illegal logical unit number
(Causa)
Se est usando un LUN no permitido.
(Solucin) Es un error interno. Compruebe la validez del nmero de unidad lgico.
FILE-010 Directory not found
(Causa)
El directorio indicado no existe.
(Solucin) Compruebe la validez del nombre de directorio.
FILE-011 Directory full
(Causa)
El directorio est lleno.
Ha intentado crear un archivo en el directorio raz que superaba el nmero mximo de
archivos permitido en el dispositivo.
(Solucin) Elimine los archivos del directorio raz que no necesite.
FILE-012 Directory is protected
(Causa)
Ha intentado escribir en un directorio protegido contra escritura.
(Solucin) Libere la proteccin del directorio.
-1435-
APENDICE D
B-82284ES-3/01
FILE-013 Illegal directory name
(Causa)
El nombre del directorio contiene un carcter no permitido.
(Solucin) Compruebe si el nombre de directorio est bien escrito.
FILE-014 File not found
(Causa)
No se ha encontrado el archivo indicado.
(Solucin) Compruebe que el archivo existe y que el nombre del archivo se ha escrito
correctamente.
FILE-015 File is protected
(Causa)
Ha intentado acceder a un archivo protegido.
(Solucin) Libere la proteccin del archivo.
FILE-017 File not open
(Causa)
Ha intentado acceder a un archivo no abierto.
(Solucin) Antes de acceder al archivo, bralo.
FILE-018 File is already opened
(Causa)
Ha intentado crear/borrar/volver a nombrar un archivo ya abierto.
(Solucin) Antes de ejecutar esas operaciones, cierre el archivo.
FILE-019 File is locked
(Causa)
Ha intentado acceder a un archivo bloqueado.
(Solucin) Libere el bloqueo.
FILE-020 Illegal file size
(Causa)
El tamao del archivo no es vlido.
(Solucin) Cambie el tamao del archivo para que sea correcto.
FILE-021 End of file
(Causa)
Se ha detectado el fin del archivo.
FILE-022 Illegal file name
(Causa)
El nombre del archivo contiene un carcter no permitido.
(Solucin) Compruebe si el nombre del archivo est bien escrito.
FILE-023 Illegal file number
(Causa)
El nmero del archivo no est permitido.
(Solucin) Use un nmero de archivo vlido, el identificador de usuario retornado desde una
peticin de apertura.
FILE-024 Illegal file type
(Causa)
El tipo de archivo contiene un carcter no permitido.
(Solucin) Compruebe si el tipo de archivo est bien escrito y si es vlido.
-1436-
APENDICE D
B-82284ES-3/01
FILE-025 Illegal protection code
(Causa)
El cdigo de proteccin del archivo no est permitido.
(Solucin) Compruebe si el cdigo de proteccin es correcto.
FILE-026 Illegal access mode
(Causa)
El modo de acceso del archivo no est permitido.
(Solucin) Compruebe si el modo de acceso es correcto.
FILE-027 Illegal attribute
(Causa)
El atributo del archivo de la peticin SET_ATTRIBUTE no est permitido.
(Solucin) Compruee que el atributo indicado sea vlido.
FILE-028 Illegal data block
(Causa)
El bloque de datos que se usa en la peticin FIND_NEXT est roto.
(Solucin) Debe mantener el bloque de datos que se devuelve de la peticin FIND_FIRST o
FIND_NEXT anterior.
FILE-029 Command is not supported
(Causa)
Se ha indicado un comando de peticin no permitido.
(Solucin) Compruebe si el cdigo de peticin es correcto.
FILE-030 Device lun table is full
(Causa)
La tabla de gestin del dispositivo est llena.
(Solucin) Desinstale los dispositivos que no necesite.
FILE-031 Illegal path name
(Causa)
El nombre de la trayectoria contiene un carcter no permitido.
(Solucin) Compruebe si el nombre de trayectoria es correcto.
FILE-032 Illegal parameter
(Causa)
Se ha detectado un parmetro no permitido.
(Solucin) Compruebe que todos los parmetros de la peticin sean vlidos.
FILE-033 System file buffer full
(Causa)
La tabla de gestin del circuito intermedio est llena.
(Solucin) Cierre los archivos que no necesite.
FILE-034 Illegal file position
(Causa)
Se ha indicado una posicin de archivo no permitida.
(Solucin) Compruebe que el parmetro de la posicin de archivo de la peticin SEEK es positiva
y no supera el fin del archivo.
FILE-035 Device not formatted
(Causa)
Ha intentado acceder a un dispositivo no formateado.
(Solucin) Formate el dispositivo antes de usarlo.
-1437-
APENDICE D
B-82284ES-3/01
FILE-036 File already exist
(Causa)
Ha intentado volver a nombrar un archivo con un nombre de archivo ya existente.
(Solucin) Cambie el nombre del nuevo archivo para que sea diferente y elimine el archivo
existente.
FILE-037 Directory not empty
(Causa)
Ha intentado eliminar un subdirectorio que contiene archivos o directorios.
(Solucin) Elimine todos los archivos y directorios del subdirectorio antes de elminar el
subdirectorio.
FILE-038 File locked by too many tasks
(Causa)
Hay demasiadas peticiones de bloqueo del mismo archivo.
(Solucin) Desbloquee todas las peticiones de bloqueo de archivo no necesarias.
FILE-039 Directory already exists
(Causa)
Ha intentado crear un subdirectorio que ya existe.
(Solucin) Use un nombre que no exista para el nuevo subdirectorio.
FILE-040 Illegal file access mode
(Causa)
Ha intentado leer un archivo abierto slo para escritura o escribir en un archivo abierto
slo para lectura.
(Solucin) Abra un archivo con el modo de acceso correcto.
FILE-041 File not locked
(Causa)
Ha intentado desbloquear un archivo que no haba bloqueado.
(Solucin) No desbloquear un archivo que no ha sido bloqueado.
Slo puede desbloquear archivos que Ud. haya bloqueado.
-1438-
APENDICE D
B-82284ES-3/01
D.2.22 Cdigos de error SSPC
SSPC-001 Waiting until space gets clear
(Causa)
El espacio de comprobacin especial no est libre.
(Solucin) No hay remedio
SSPC-002 Occer dead lock condition
(Causa)
La prioridad de espacio no es vlida
(Solucin) Valide la prioridad
SSPC-003 AccuPath not allowed
(Causa)
La funcin de comprobacin de espacio no es compatible con AccuPath.
AccuPath no est permitido.
(Solucin) No use AccuPath o desactive la funcin de comprobacin de espacio.
SSPC-004 CTV option not allowed
(Causa)
La funcin de comprobacin de espacio no es compatible con la opcin Continuous
Turn CTV.
La opcin de movimiento CTV no est permitida.
(Solucin) Elimine la opcin CTV o desactive la funcin de comprobacin de espacio.
SSPC-011 APDT error (i)
(Causa)
Error interno
(Solucin) Pngase en contacto con el representante de FANUC de su zona e infrmele de la
secuencia de caracters que se indica en (i) en el mensaje.
SSPC-012 Invalid element (s:i j)
(Causa)
La configuracin de los elementos modelo no es corrrecta.
Ejemplo de visualizacin: "Invalid element (G:1 6)" El elemento modelo sexto del
grupo 1 est mal configurado.
"Invalid element (H:2 1)"El elemento modelo primero de la pinza 2 est mal
configurado.
(Solucin) Compruebe la configuracin de los elementos modelo.
Compruebe que la configuracin del nmero de conexin y el tipo de conexin sea
correcta.
SSPC-013 Invalid hand num (G:i UT:j)
(Causa)
El nmero de pinza asignado al nmero del sistema de coordenadas de la herramienta
(UT:j) del grupo (G:i) no es vlido.
(Solucin) En la pantalla de configuracin de modelos, compruebe la asignacin de nmero de
pinza.
SSPC-014 Common frame setting (G:i)
(Causa)
No se ha completado el calibrado inter-robot del grupo (G:i).
(Solucin) Ejecute el calibrado inter-robot.
SSPC-015 Not calibrated (G:i)
(Causa)
No se ha completado el calibrado del grupo (G:i).
(Solucin) Ejecute el calibrado.
-1439-
APENDICE D
B-82284ES-3/01
SSPC-016 Invalid comb type (C:i s)
(Causa)
El tipo de modelo del/de los extremo/s (L [izquierdo], R[derecho]) de la configuracin
combinada (C:i) no es vlido.
(Solucin) En la pantalla de configuracin de combinacin de modelos, compruebe el tipo de
modo.
SSPC-017 Invalid comb index (C:i s)
(Causa)
El nmero de modelo del/de los extremo/s (L [izquierdo], R[derecho]) de la
configuracin combinada (C:i) no es vlido.
(Solucin) En la pantalla de configuracin de combinacin de modelos, compruebe el nmero de
modelo.
SSPC-018 APDT is not supported (G:i)
(Causa)
El robot del grupo (G:i) no admite la funcin de paro de proximidad.
(Solucin) En la pantalla de configuracin de combinacin de modelos, compruebe el tipo de
modelo y el nmero de modelo.
SSPC-019 (G:i) is close to target
(Causa)
Se ha detectado una interferencia.
(Solucin) Se puede mostrar una alarma mediante una operacin de reinicio corriente.
SSPC-020 Invalid fixture obj (F:i)
(Causa)
El nmero de grupo de programacin del modelo de plantilla (F:i) no es vlido.
(Solucin) En la pantalla de configuracin de modelos de plantilla, compruebe el nmero de grupo
de programacin.
SSPC-021 Too many settings
(Causa)
Hay un nmero excesivo de configuraciones de modelos o configuraciones de
combinaciones.
(Solucin) Reduzca el nmero de configuraciones.
SSPC-101 (G:i) is close to target
(Causa)
Se ha detectado proximidad. ( i: Nmero de grupo)
(Solucin) Se puede mostrar una alarma mediante una operacin de reinicio corriente.
SSPC-101 SSPC-102 (G:i) is close to target(qstop)
(Causa)
Se ha detectado proximidad. ( i: Nmero de grupo)
(Solucin) Se puede mostrar una alarma mediante una operacin de reinicio corriente.
SSPC-103 (G:i) is near to target
(Causa)
Se ha producido un paro gradual. ( i: Nmero de grupo)
(Solucin) Se puede mostrar una alarma mediante una operacin de reinicio corriente.
SSPC-104 APDT error (i)
(Causa)
Error interno (i: Nmero de error)
(Solucin) Por lo general, no se muestra esta alarma. Informe al representante de asistencia tcnica
de su zona del valor numrico indicado en (i) en el mensaje.
-1440-
APENDICE D
B-82284ES-3/01
SSPC-105 Too many settings
(Causa)
Hay un nmero excesivo de configuraciones de modelos o configuraciones de
combinaciones.
(Solucin) Reduzca el nmero de configuraciones.
SSPC-106 Failed to get dist (j,C:i)
(Causa)
No se ha podido calcular la distancia entre los elementos modelo.
(Solucin) SSPC-111. Por lo general, no se muestra esta alarma. Informe al representante de
asistencia tcnica de su zona del valor numrico indicado en (j,C:i) en el mensaje.
SSPC-111 Invalid comb type (ST,C:i,s)
(Causa)
El tipo de modelo del/de los extremo/s (L [izquierdo], R[derecho]) del nmero de
combinacin (C:i) de la combinacin de paro de proximidad no es vlido.
(Solucin) En la pantalla de configuracin de paro de proximidad, compruebe el tipo de modelo.
SSPC-112 Invalid comb index(ST,C:i,s)
(Causa)
El nmero de modelo del/de los extremo/s (L [izquierdo], R[derecho]) del nmero de
combinacin (C:i) de la combinacin de paro de proximidad no es vlido.
(Solucin) En la pantalla de configuracin de modelo de paro de proximidad, compruebe el nmero
de modelo.
SSPC-113 APDT isn't supported (ST,G:i)
(Causa)
El robot del grupo (G:i) no admite la funcin de paro de proximidad.
(Solucin) En la pantalla de configuracin de modelo de paro de proximidad, compruebe el tipo de
modelo y el nmero de modelo.
SSPC-114 Not calibrated (ST,G:i)
(Causa)
No se ha completado el calibrado del grupo (G:i).
(Solucin) Ejecute el calibrado.
SSPC-115 Invalid utool number (ST,G:i)
(Causa)
El nmero del sistema de coordenadas de la herramienta del grupo (G:i) no es vlido.
(Solucin) Compruebe el nmero del sistema de coordenadas de la herramienta.
SSPC-116 Invalid hand num(ST,G:i,UT:j)
(Causa)
El nmero de pinza asignado al nmero del sistema de coordenadas de la herramienta
(UT:j) del grupo (G:i) no es vlido.
(Solucin) En la pantalla de configuracin de modelos, compruebe la asignacin de nmero de
pinza.
SSPC-117 Common frame setting (ST,G:i)
(Causa)
No se ha completado el calibrado inter-robot del grupo (G:i).
(Solucin) SSPC-111. Perform inter-robot calibration.
-1441-
APENDICE D
B-82284ES-3/01
SSPC-118 Invalid element (ST,s:i,j)
(Causa)
La configuracin de los elementos modelo no es corrrecta.
Ejemplo de visualizacin: "Invalid element (ST,G:1 6) " El elemento modelo sexto del
grupo 1 est mal configurado.
"Invalid element (ST ,H:2 1)"El elemento modelo primero de la pinza 2 est mal
configurado.
(Solucin) Compruebe la configuracin de los elementos modelo.
Compruebe que la configuracin del nmero de conexin y el tipo de conexin sea
correcta.
SSPC-119 Can't get elem pos(ST,G:i,j)
(Causa)
No se ha podido calcular la posicin actual de un elemento modelo.
(Solucin) Por lo general, no se muestra esta alarma. Informe al representante de asistencia tcnica
de FANUC de su zona del valor numrico indicado en (ST,G:i, j) en el mensaje.
SSPC-120 Invalid fixture obj (ST,F:i)
(Causa)
El nmero de grupo de programacin del modelo de plantilla (F:i) no es vlido.
(Solucin) En la pantalla de configuracin de modelos de plantilla, compruebe el nmero de grupo
de programacin.
SSPC-131 Invalid comb type (WT,C:i,s)
(Causa)
El tipo de modelo del/de los extremo/s (L [izquierdo], R[derecho]) del nmero de
combinacin (C:i) de la combinacin de espera de proximidad no es vlido.
(Solucin) En la pantalla de configuracin de espera de proximidad, compruebe el tipo de modelo.
SSPC-132 Invalid comb index(WT,C: i,s)
(Causa)
El nmero de modelo del/de los extremo/s (L [izquierdo], R[derecho]) del nmero de
combinacin (C:i) de la combinacin de espera de proximidad no es vlido.
(Solucin) En la pantalla de configuracin de espera de proximidad, compruebe el nmero de
modelo.
SSPC-133 APDT isn't supported (WT,G:i)
(Causa)
El robot del grupo (G:i) no admite la funcin de espera de proximidad.
(Solucin) En la pantalla de configuracin de espera de proximidad, compruebe el tipo y el nmero
de modelo.
SSPC-134 Not calibrated (WT,G:i)
(Causa)
No se ha completado el calibrado del grupo (G:i).
(Solucin) Ejecute el calibrado.
SSPC-135 Invalid utool number (WT,G:i)
(Causa)
El nmero del sistema de coordenadas de la herramienta del grupo (G:i) no es vlido.
(Solucin) Compruebe el nmero del sistema de coordenadas de la herramienta.
SSPC-136 Invalid hand num(WT,G:i,UT:j)
(Causa)
El nmero de pinza asignado al nmero del sistema de coordenadas de la herramienta
(UT:j) del grupo (G:i) no es vlido.
(Solucin) En la pantalla de configuracin de modelos, compruebe la asignacin de nmero de
pinza.
-1442-
APENDICE D
B-82284ES-3/01
SSPC-137 Common frame setting (WT,G:i)
(Causa)
No se ha completado el calibrado inter-robot del grupo (G:i).
(Solucin) Ejecute el calibrado inter-robot.
SSPC-138 Invalid element (WT,s:i,j)
(Causa)
La configuracin de los elementos modelo no es corrrecta.
Ejemplo de visualizacin:
"Invalid element (WT, G:1 6)" El elemento modelo sexto del grupo 1 est mal
configurado.
"Invalid element (WT,H:2 1)"El elemento modelo primero de la pinza 2 est mal
configurado.
(Solucin) Compruebe la configuracin de los elementos modelo.
Compruebe que la configuracin del nmero de conexin y el tipo de conexin sea
correcta.
SSPC-139 Can't get elem pos(WT,G:i,j)
(Causa)
No se ha podido calcular la posicin actual de un elemento modelo.
(Solucin) Por lo general, no se muestra esta alarma. Informe al representante de asistencia tcnica
de FANUC de su zona del valor numrico indicado en (WT,G:i, j) en el mensaje.
SSPC-140 Invalid fixture obj (WT,F:i)
(Causa)
El nmero de grupo de programacin del modelo de plantilla (F:i) no es vlido.
(Solucin) En la pantalla de configuracin de modelos de plantilla, compruebe el nmero de grupo
de programacin.
SSPC-151 App_STOP (ST,C:i) is disabled
(Causa)
Se ha intentado desactivar temporalmente la combinacin de paro de proximidad
invlida (C:i) en la pantalla de configuracin con una instruccin de programa.
(Solucin) Active la combinacin de paro de proximidad en la pantalla de configuracin antes de
usarla.
SSPC-152 App_STOP (ST,C:i) is disabled
(Causa)
Se ha intentado desactivar temporalmente la combinacin de paro de proximidad
invlida (C:i) en la pantalla de configuracin con una instruccin de programa.
(Solucin) Active la combinacin de paro de proximidad en la pantalla de configuracin antes de
usarla.
SSPC-153 (WT,C:i) is enabled by other
(Causa)
Se ha intentado activar/desactivar el nmero de condicin de espera de proximidad (C:
i) ya activado mediante otra tarea.
(Solucin) Actualmente, otro programa est usando el nmero de condicin de espera de
proximidad.
selo cuando est libre.
SSPC-154 (ST,C:i) is disabled by other
(Causa)
La instruccin de paro de proximidad se usaba para el nmero de condicin de paro de
proximidad (C:i) empleada por otra tarea.
(Solucin) Actualmente, otro programa est usando el nmero de condicin de paro de proximidad.
selo cuando est libre.
-1443-
APENDICE D
B-82284ES-3/01
SSPC-155 Invalid host name (ST,C:i)
(Causa)
Se ha configurado un nmero de servidor no vlido en una combinacin de paro de
proximidad indicada.
(Solucin) Compruebe el nombre del servidor en la pantalla de comunicacin del servidor de la
pantalla de configuracin.
Introduzca un nombre de servidor correcto.
SSPC-156 Invalid host name (WT,C:i)
(Causa)
Se ha configurado un nmero de servidor no vlido en una combinacin de espera de
proximidad indicada.
(Solucin) Compruebe el nombre del servidor en la pantalla de comunicacin del servidor de la
pantalla de configuracin.
SSPC-157 Intrupt signal (WT,C:i)
(Causa)
En el estado de espera de proximidad se ha introducido la seal de interrupcin de
espera de proximidad.
(Solucin) Si la interrupcin es inesperada, compruebe la configuracin de la seal de interrupcin
de espera de proximidad.
Compruebe tambin si la misma seal se emplea con otro propsito.
SSPC-158 App_WAIT timeout (WT,C:i)
(Causa)
En el estado de espera de proximidad, se ha superado el tiempo configurado en el tiempo
lmite.
(Solucin) Configure el tiempo de espera.
Para esperar indefinidamente, seleccione 0 para "time-out" en la pantalla de
configuracin de combinacin de espera de proximidad.
SSPC-159 App_WAIT can't be used(WT,G:i)
(Causa)
En las siguientes operaciones, no se puede ejecutar el paro/reinicio automtico basado
en la funcin de espera de proximidad:
- Cuando la operacin de seguimiento del robot esclavo se ejecuta basndose en la
sincronizacin de la conexin del robot
- Cuando se usa la funcin de rotacin contnua.
(Solucin) No use ninguna de las dos funciones anteriores en el momento de una operacin de paro/
reinicio automtico.
SSPC-160 App_STOP is TMP_DISed(ST,C:i)
(Causa)
Este mensaje se muestra como confirmacin cuando la combinacin (C:i) est
temporalmente desactivada por la instruccin de paro de proximidad.
-1444-
APENDICE D
B-82284ES-3/01
SSPC-161 App_STOP is enabled (ST,C:i)
(Causa)
Esta alarma se muestra en los siguientes casos:
- Cuando el programa est temporalmente detenido con la combinacin (C:i)
temporalmente desactivada mediante la instruccin de paro de proximidad. Se reinicia
cambiando la lnea.
- Cuando el programa est temporalmente detenido con la combinacin (C:i)
temporalmente desactivada mediante la instruccin de paro de proximidad. Se ejecuta
tras la retraccin.
(Solucin)
Tras mostrarse esta alarma, la combinacin no est temporalmente desactivada aunque
se reinicie el programa.
Al reiniciar el programa cambiando la lnea, responda NO al mensaje de confirmacin
para impedir que se desactive la ejecucin.
SSPC-162 App_WAIT is enabled (WT,C:i)
(Causa)
Este mensaje se muestra como confirmacin cuando la combinacin (C:i) est activada
por la instruccin de espera de proximidad.
SSPC-163 App_WAIT is enabled (WT,C:i)
(Causa)
Esta alarma se muestra en los siguientes casos:
- Cuando el programa est temporalmente detenido con la combinacin (C:i) activada
mediante la instruccin de espera de proximidad. Se reinicia cambiando la lnea.
- Cuando el programa est temporalmente detenido con la combinacin (C:i) activada
mediante la instruccin de espera de proximidad. Se ejecuta tras la retraccin.
(Solucin)
Tras mostrarse esta alarma, la funcin de espera de proximidad est desactivada aunque
se reinicie el programa.
Al reiniciar el programa cambiando la lnea, responda NO al mensaje de confirmacin
para impedir que se desactive la ejecucin.
SSPC-168 (s,i) invalid group number
(Causa)
Se indica un nmero de grupo no vlido con la instruccin de sensibilidad de paro de
proximidad.
(Solucin) Indique un nmero de grupo correcto. (s: Nombre del programa, i: Nmero de lnea)
SSPC-169 PAUSE.G (s, i) invalid rate value"
(Causa)
Se indica una sensibilidad no vlida con la instruccin de sensibilidad de paro de
proximidad.
(s: Nombre del programa, i: Nmero de lnea)
(Solucin) Introduzca un valor correcto (0-100).
SSPC-181 Comm init error i s
(Causa)
Se ha producido un error en el tiempo de inicializacin de la comunicacin.
(i: Nmero de causa del error, s: Nombre de la unidad de control)
(Solucin) Para el nombre de la unidad de control que indica el mensaje de error, compruebe la
configuracin de la direccin, el nombre del servidor y el estado de la lnea de
comunicacin.
-1445-
APENDICE D
B-82284ES-3/01
SSPC-182 Invalid hostname (s)
(Causa)
Tras configurar un nuevo nombre de unidad de control con una combinacin de paro de
proximidad o espera de proximidad, se ha intentado activar la configuracin antes de
desconectar y volver a conectar la potencia.
Tambin puede estar indicado un nombre de unidad de control no vlido.
(s: Nombre de la unidad de control)
(Solucin) Cuando se ha indicado un nuevo nombre de unidad de control, debe desconectar la
potencia y volver a conectarla para que la configuracin sea efectiva.
Adems, compruebe el nombre de la unidad de control en la pantalla de configuracin
de comunicacin del servidor.
SSPC-183 Invalid address (s)
(Causa)
La configuracin de la direccin de comunicacin del nombre de la unidad de control
para el que se muestra esta alarma. (s: Nombre de la unidad de control)
(Solucin) Debe comprobar y modificar segn desee el nmero de unidad de control y su direccin.
A continuacin, debe desconectar la potencia y volverla a conectar para que la
configuracin sea efectiva.
SSPC-184 Number of host exceed limit
(Causa)
El nmero de unidades de control que se pueden indicar para la configuracin de paro
de proximidad y la configuracin de espera de proximidad de una unidad de control ha
superado el lmite.
(Solucin) Elimine las unidades que no use, de haberlas, de la pantalla de configuracin de paro de
proximidad y de la pantalla de configuracin de espera de proximidad.
Tambin puede reducir el nmero de unidades de control indicadas.
SSPC-185 Number of element exceed limit
(Causa)
El nmero de elementos cuyas configuraciones se pueden activar en una unidad de
control ha superado el lmite.
(Solucin) Compruebe las configuraciones de los elementos y desactive las configuraciones de los
elementos que puedan no usarse. Tambin puede reducir el nmero de elementos cuyas
configuraciones se activan.
SSPC-186 Invalid element (s,i,j)
(Causa)
La configuracin de un elemento de la unidad de control indicada mediante el nombre
de la unidad de control en este mensaje de alarma no es vlida. (s: Nombre de la unidad
de control, i: Tipo de elemento, j: Nmero de elemento)
Elemento tipo 1 representa el robot, elemento tipo 2 representa la mano, y el elemento
tipo 3 representa la plantilla.
(Solucin) Compruebe y modifique la configuracin del elemento.
-1446-
APENDICE D
B-82284ES-3/01
SSPC-187 Receive invalid data i s
(Causa)
Los datos recibidos de otra unidad de control contienen un error.
(Solucin) Compruebe si se ha producido un error en la unidad de control o el concentrador de
origen.
SSPC-188 Invalid data for send i
(Causa)
Los datos a enviar a otra unidad de control contienen un error.
(Solucin) SSPC-111. Open the element setting screen, then check if the settings are correct and
also check if all data is displayed correctly. Si aparece esta alarma aunque todos los
elementos estn correctamente configurados, pngase en contacto con el representante
de asistencia tcnica de FANUC de su zona.
SSPC-189 Timeout element (s,i,j)
(Causa)
Los datos de posicin de un elemento remoto recibidos de otra unidad de control son
obsoletos.
Es posible que la comunicacin con la unidad de control est desconectada.
(s: Nombre de la unidad de control, i: Tipo de elemento, j: Nmero de elemento)
(Solucin) Si la comunicacin est desconectada, por lo general se muestra la alarma de ausencia
de respuesta.
Apague y vuelva a encender.
SSPC-190 No communication (s)
(Causa)
Esta alarma se muestra cuando no se recibe respuesta de otra unidad de control.
(s: Nombre de la unidad de control) Esta funcin no comunica con una unidad de
control no indicada como destino de paro de proximidad o espera de proximidad. As
pues, esta alarma tambin se muestra cuando la unidad de control indicada en la alarma
no tiene una configuracin de paro de proximidad o espera de proximidad efectuado
para la unidad de control de destino.
(Solucin) Compruebe el cableado de la lnea de comunicacin, la direccin, el nombre del
servidor y las configuraciones del concentrador.
Por otro lado, y tambin en la unidad de control remoto, efecte una configuracin de
paro de proximidad o espera de proximidad para la unidad de control de destino.
SSPC-191 Target elem not exist(ST,C:i,s)
(Causa)
El elemento del/de los extremo/s (L [izquierdo], AR[derecho]) de la combinacin de
paro de proximidad (C:i) contiene un error Puede haber uno de los errores siguientes:
- Se ha indicado un nmero de tipo de elemento no existente.
- Se ha indicado un grupo no existente.
- Todos los elementos del $IA_GRP.$ROBOT, $IA_HAND o $IA_FOBJ de destino
estn desconectados.
- La unidad de control de destino de comunicacin no tiene un destino correctamente
configurado por una razn anteriormente indicada o porque no se ha ejecutado el
calibrado.
(Solucin) Compruebe los elementos anteriores.
-1447-
APENDICE D
B-82284ES-3/01
SSPC-192 Target elem not exist(PA,C:i,s)
(Causa)
El elemento del/de los extremo/s (L [izquierdo], AR[derecho]) de la combinacin de
espera de proximidad (C:i) contiene un error Puede haber uno de los errores siguientes:
- Se ha indicado un nmero de tipo de elemento no existente.
- Se ha indicado un grupo no existente.
- Todos los elementos del $IA_GRP.$ROBOT, $IA_HAND o $IA_FOBJ de destino
estn desconectados.
- La unidad de control de destino de comunicacin no tiene un destino correctamente
configurado por una razn anteriormente indicada o porque no se ha ejecutado el
calibrado.
(Solucin) Compruebe los elementos anteriores.
SSPC-193 IAL detect overload (i)
(Causa)
La operacin, el procesamiento de la comunicacin, el procesamiento del paro de
proximidad y el procesamiento de la espera de proximidad de la unidad de control estn
provocando una sobrecarga.
Es posible que el periodo de interpolacin sea demasiado corto para la configuracin del
robot actual.
(Solucin) Por lo general, no se muestra esta alarma.
Pngase en contacto con el representante de asistencia tcnica de FANUC de su zona.
-1448-
APENDICE D
B-82284ES-3/01
D.2.23 Cdigos de error CNTR
CNTR-004 WARN No cnir pointer
(Causa)
Error de software interno.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
CNTR-005 WARN Wrong CN Axis/N1 or N2 (G:i)
(Causa)
El nmero del eje de rotacin continua no es vlido.
(Solucin) Introduzca un nmero de eje vlido.
CNTR-006 WARN Unable to Allocate Memory
(Causa)
Error de software interno.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
CNTR-007 STOP.G Serious Internal error (G:i)
(Causa)
Error de software interno.
(Solucin) Pngase en contacto con el servicio de asistencia tcnica de FANUC de su zona.
CNTR-008 STOP.G Invalid dest.angle (G:i)
(Causa)
Se ha indicado una opcin de operacin que no se puede usar con la funcin de rotacin
continua.
(Solucin) Compruebe la opcin de operacin.
CNTR-009 WARN Warn-Cont Vel too high (G:i)
(Causa)
La velocidad de rotacin continua es relativamente alta.
(Solucin) Esto no representa un problema. Ignore este mensaje.
CNTR-010 STOP.G Ind.EV option not allowed
(Causa)
Se emplean una instruccin de velocidad del eje adicional y una instruccin de rotacin
continua.
(Solucin) Elimine una de las dos instrucciones.
CNTR-011 STOP.G Axis speed exceeds lim (G:i)
(Causa)
La velocidad de rotacin continua es superior al lmite.
(Solucin) Reduzca la velocidad de rotacin continua.
CNTR-012 STOP.G Ending Cont Rot on Rel Motion
(Causa)
La instruccin de velocidad de rotacin continua ha concluido con una operacin
relativa.
(Solucin) Compruebe la instruccin de aadir opreacin junto con la instruccin de rotacin
continua.
-1449-
APENDICE D
B-82284ES-3/01
D.2.24 Cdigos de error RTCP
RTCP-001 Wrist Joint is not allow
(Causa)
La conexin de la mueca se usa en el movimiento de reanudacin.
(Solucin) RTCP y Wrist Joint (conexin de mueca) no son compatibles. Por lo general, Wrist
Joint se usa con el movimiento de reanudacin, por lo que este error siempre se produce.
Cambie la configuracin del movimiento de reanudacin y no use la conexin de
mueca.
-1450-
APENDICE D
B-82284ES-3/01
D.2.25 Cdigos de error APSH
APSH-000 WARN %s
(Causa)
Mensajes de estado general.
(Solucin) N/A
APSH-001 WARN %s missing
(Causa)
Se ha llamado un MACRO sin un parmetro que deba haber sido introducido.
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-002 WARN %s Illegal type
(Causa)
Se ha llamado un MACRO con un parmetro que es ilegal.
El parmetro tiene el tipo de datos errneo.
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-003 WARN %s Illegal zone number
(Causa)
Se ha usado un nmero de zona menor de 1 o mayor que $IZONEIO.$NO_ZONES.
(Solucin) Use un nmero de eventos de 1 a $IZONEIO.$NO_ZONES.
APSH-004 WARN Waiting for interf. zone
(Causa)
El robot ha solicitado una zona de interferencia, pero no se le ha dado permiso para
entrar por el controlador de clula.
(Solucin) Si el controlador de clula no da control de una zona de interferencia al robot cuando
debera, comprobar la programacin de la zona de interferencia del controlador de
clula.
APSH-005 WARN Entering interf. zone %s
(Causa)
El robot ha recibido permiso para entrar en la zona de interferencia.
(Solucin) Se usa slo para eliminar la espera para los mensajes de la zona de interferencia.
APSH-006 WARN PERM memory is low
(Causa)
Este aviso indica que la cantidad de memoria libre en la divisin de la memoria CMOS
ha estado peligrosamente baja.
Si la memoria PERM se agota, se notarn extraos errores MEMO y posiblemente el
robot se bloquee o se de un vaciado de registro.
(Solucin) Slo aviso. Borrar cualquier dato innecesario.
Contacte su representante FANUC con este error.
Probablemente tendr que ajustar la configuracin de la memoria en su controlador de
robot.
APSH-007 WARN TEMP DRAM memory is low
(Causa)
Este aviso indica que la cantidad de memoria libre en la divisin de la memoria TEMP
ha estado peligrosamente baja.
Si la memoria TEMP se agota, se notarn extraos errores MEMO y posiblemente el
robot se bloquee o se produzca un vaciado por error de registro.
(Solucin) Slo aviso. Borrar cualquier dato innecesario.
Contacte su representante FANUC con este error.
Probablemente tendr que ajustar la configuracin de la memoria en su controlador de
robot.
-1451-
APENDICE D
B-82284ES-3/01
APSH-008 WARN FAULT must be reset
(Causa)
Se ha producido un fallo, as que la operacin requerida no puede ser realizada.
(Solucin) Corrige el origen del fallo y pulse FAULT RESET.
APSH-009 WARN Program already running
(Causa)
El "shell" ha detectado una seal de inicio pero ya est en funcionamiento un programa.
(Solucin) Re-emita el requerimiento de inicio cuando el programa actual sea detenido o abortado.
APSH-010 WARN %s aborted
(Causa)
Un UOP CYCLE START o DI[Initiate Style] ha sido detectado cuando se ha detenido
un programa de improduccin (esto es, el ciclo de test).
Este programa detenido ha sido abortado por razones de seguridad.
(Solucin) No se requiere ninguna.
La prxima seal de inicio de produccin iniciar el estilo actual.
APSH-012 WARN REMOTE switch must be on LOCAL
(Causa)
La condicin REMOTE del robot es TRUE, as el dispositivo operativo remoto (PLC)
actualmente tiene control de movimiento sobre el robot.
(Solucin) Desactivar la condicin REMOTE girando el interruptor de la tecla REMOTE en el
SOP a LOCAL.
APSH-013 WARN Place robot into REMOTE state
(Causa)
La condicin REMOTE es actualmente falsa, as el robot no est bajo control del
dispositivo operativo remoto (PLC).
Verificar que las condiciones siguientes son verdaderas para poner el robot en condicin REMOTE:
(Solucin 1) UOP entradas #1 (IMSTP), #3 (SFTYSPD) y #8 (ENBL) estan HIGH.
(Solucin 2) El interruptor de la tecla SOP REMOTE/LOCAL est establecido en REMOTE.
(Solucin 3) La consola de programacin est desactivada.
(Solucin 4) La entrada del modo Robot Auto/Bypass es HIGH (si es as asignada).
(Solucin 5) Asegurarse de que un programa de usuario no establece $RMT_MASTER = 1.
APSH-014 WARN RESET Failure
(Causa)
Hay un fallo activo, que previene el requerimiento de reinicio de la ejecucin.
(Solucin) Corrige el origen del fallo (normalmente un E-Stop externo) y pulse FAULT RESET.
APSH-015 WARN Step mode must be disabled
(Causa)
El modo a pasos est activado, lo que previene el requerimiento de funcionamiento de
la ejecucin.
(Solucin) Desactivar el modo a pasos pulsando la pieza STEP.
APSH-016 WARN Robot is not under PLC control
(Causa)
El UOP no es el dispositivo master, que previene el requerimiento de funcionamiento
de ejecutarlo.
(Solucin) Girar el interruptor de la tecla SOP REMOTE/LOCAL en REMOTE. Asegurarse de que
todas las seales UOP son correctas para la ejecucin.
Establecer $RMT_MASTER en 0.
-1452-
APENDICE D
B-82284ES-3/01
APSH-017 WARN Running with process disabled
(Causa)
Esto es un aviso para comunicar al usuario que un trabajo de produccin est
efectundose con el sellante desactivado.
(Solucin) No se necesita ninguno.
APSH-018 WARN WARNING - Machine lock is on
(Causa)
Esto es un aviso para comunicar al usuario que un trabajo de produccin est
efectundose con la mquina bloqueada.
(Solucin) No se necesita ninguno.
APSH-019 WARN Job queue is full
(Causa)
La cola de tareas no puede aceptar la prxima tarea porque est completa.
(Solucin) Editar manualmente la cola de tareas para borrar alguna tarea innecesaria o incrementar
el tamao de la cola.
APSH-020 WARN Job queue is empty
(Causa)
Ha entrado un requerimiento para ejecutar la prxima tarea en la cola, pero la cola est
vaca.
(Solucin) Comprobar el dispositivo externo para asegurar que se ha enviado correctamente un
nmero de tareas al controlador, o manualmente editar la cola de tareas para crear
(CREATE) una tarea.
APSH-021 WARN Raise UOP ENBL input
(Causa)
El movimiento del robot y/o la ejecicin del programa no puede suceder a menos que la
entrada 8 de UOP est ON.
(Solucin) Comprobar la configuracin de la E/S de UOP. La entrada 8 (ENBL) del UOP debe
estar en ON.
APSH-022 WARN Safety fence is open
(Causa)
La entrada de la verja de seguridad est baja (LOW).
(Solucin) La entrada de la verja de seguridad debe estar en ON para reanudar la operacin del
robot normal.
Levantar la entrada de la verja de seguridad.
APSH-024 WARN Program %s not loaded
(Causa)
El nombre del programa que el "shell" requiri para ejecutar no est cargado en el
controlador.
(Solucin) Check PLC->Robot style communication.
Verificar que el nombre, JOB, del trabajo especificado fue requerido por el PLC.
Cargar o crear el programa del trabajo (JOB) especificado.
APSH-025 WARN WARNING - Running at < 100%%
(Causa)
Esto es un aviso para comunicar al usuario que un trabajo de produccin est
efectundose a menos de 100% de velocidad.
(Solucin) No se necesita ninguno.
La herramienta de administracin puede incrementar la velocidad a 100% si Ud. lo
desea.
Ir al men de configuracin de clula para acceder a esta opcin.
-1453-
APENDICE D
B-82284ES-3/01
APSH-027 WARN Press FAULT RESET button
(Causa)
Para reanudar la operacin de produccin normal, la herramienta de administracin
requiere que Ud. realice esta accin.
(Solucin) Realizar la accin implicada en el mensaje de error cuando Ud. est preparado para
reanudar la operacin normal.
APSH-028 WARN Increasing speed to 100%
(Causa)
Este es un aviso para comunicar al usuario que la herramienta de administracin est
aumentando la velocidad (override) a 100%.
(Solucin) No se necesita ninguno. Para desactivar esta caracterstica, se debe cambiar esta opcin
en el men de configuracin de clula.
APSH-029 WARN Robot must be at home
(Causa)
El robot debe estar en la posicin HOME para realizar la operacin requerida.
Este error es usualmente expuesto cuando el PLC enva un inicio de ciclo y el robot no
se encuentra en su posicin inicial (home).
(Solucin) Mover el robot a la posicin inicial.
APSH-030 WARN Style code %s is invalid
(Causa)
Se ha establecido GIN[style_in] en un nmero invlido.
(Solucin) Comprobar el valor de GIN[style_in] tanto como la configuracin de entrada del Grupo.
APSH-031 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Comprobar el valor de GIN[style_in] tanto como la configuracin de entrada del Grupo.
APSH-032 WARN Robot Servos Disabled
(Causa)
La herramienta de administracin ha detectado que el robot servos ha sido desactivado
manualmente.
(Solucin) Este es un mensaje de estado para asegurar que el usuario est al tanto de que el robot
no puede moverse.
El servo debe ser re-activado para reanudar las operaciones de produccin normales.
APSH-033 WARN PLC comm. error - timeout
(Causa)
Una secuencia de comunicacin tom demasiado tiempo para completar.
(Solucin) Incrementar el valor de temporizacin de comunicacin en el men de configuracin de
comunicacin de clula PNS o desactivar la comprobacin de temporizacin de
comunicacin.
APSH-034 WARN No UOP output defined
(Causa)
El grupo de salida del Panel del Operador del Usuario (UOP) no ha sido definido.
(Solucin) Configurar las salidas del UOP en el men E/S del UOP y reiniciar el controlador del
robot.
-1454-
APENDICE D
B-82284ES-3/01
APSH-035 WARN Robot is in Bypass mode
(Causa)
La entrada del MODE es baja, forzando el robot en modo BYPASS.
El robot ignorar ahora toda la iniciacin de estilo PLC.
(Solucin) Establecer el interruptor del MODE en ON.
El robot reentrar entonces el modo AUTOMATIC y aceptar de nuevo las seales
PLC.
APSH-036 WARN User JOB has been paused
(Causa)
El trabajo, JOB, actual ha sido detenido.
Esto sucede frecuentemente si la entrada de HOLD es cambiada a ON o la seal ENBL
del UOP es establecida en OFF.
(Solucin) Si la condicin REMOTE es TRUE, el men de recuperacin de falllo aparecer y dar
al usuario las opciones de recuperacin apropiadas.
Si la condicin REMOTE no es TRUE, la recuperacin depende del usuario.
Si lo dems falla, seleccionar FCTN (tecla de funcin) entonces ABORT ALL.
APSH-037 WARN No UOP input defined
(Causa)
El grupo de entrada del Panel del Operador del Usuario (UOP) no ha sido definido.
(Solucin) Configurar las entradas de UOP en el men E/S del UOP.
APSH-038 WARN No style input group defined
(Causa)
El grupo que lleva el cdigo de estilo al controlador no ha sido definido.
(Solucin) Configurar un grupo STYLE SELECT en los mens de entrada de la clula E/S y
GROUP I/O y reiniciar el robot.
APSH-039 WARN No style ack strobe defined
(Causa)
El estroboscpico reconocimiento de estilo, que es necesario con la configuracin de
comunicacin actual, no ha sido definido.
(Solucin) Configurar un estroboscpico reconocimiento de estilo en el men E/S de la salida de
la clula e reiniciar el robot.
APSH-040 WARN No backup input group defined
(Causa)
El grupo de entrada de reserva, que es necesario con la configuracin de comunicacin
actual, no ha sido definido.
(Solucin) Configurar un grupo de seleccin de estilo de reserva en los mens de entrada de la
clula E/S y GROUP I/O y reiniciar el robot.
APSH-041 WARN No style input strobe defined
(Causa)
El estroboscpico estilo, que es necesario con la configuracin de comunicacin actual
(fila activada), no ha sido definido.
(Solucin) Configurar un estroboscpico PNS en el men E/S de la entrada de la clula e reiniciar
el robot.
APSH-042 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Configurar un estroboscpico PNS en el men E/S de la entrada de la clula y reiniciar
el robot.
-1455-
APENDICE D
B-82284ES-3/01
APSH-043 WARN No style ack group defined
(Causa)
El grupo de reconocimiento de estilo, que es necesario con la configuracin de
comunicacin actual, no ha sido definido.
(Solucin) Configurar un grupo de reconocimiento de estilo en los mens de entrada de la clula
E/S y GROUP I/O y reiniciar el robot.
APSH-044 WARN A user program is HELD
(Causa)
La tarea actual ha sido mantenida pulsando el botn HOLD o estableciendo la entrada
UOP HOLD en LOW.
(Solucin) Liberar el botn HOLD y levantar la entrada UOP HOLD.
APSH-045 WARN No program setup for style %s
(Causa)
No se ha configurado ningn nmero de programa para esta entrada RSR.
(Solucin) Entrar un nmero de programa para esta entrada RSR en el men de configuracin de
clula RSR.
APSH-046 WARN Robot is in Automatic mode
(Causa)
Esto es un comunicado de que el robot est saliendo del modo BYPASS y entrando en
el modo AUTOMATIC , donde puede responder a entradas PLC.
(Solucin) No se necesita ninguno.
APSH-047 WARN Shell will not run without UOPs
(Causa)
Esto es un aviso, explicando al usuario que los UOP no han sido an configurados, as
que el "shell" esperar a que los UOP sean definidos antes de reanudar.
(Solucin) El "shell" requiere que funcionen los UOP.
Una vez que los UOP han sido configurados, el "shell" continuar su secuencia de
iniciacin.
APSH-048 WARN PLC comm error-invert check
(Causa)
El grupo de estilo de reserva no es el primer complemento (inverso) del grupo de la
entrada de estilo.
(Solucin) Verificar que el PLC est enviando el estilo inverso correcto al grupo correcto.
Desactivar la comprobacin inversa en el men de configuracin de clula PNS.
APSH-049 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Verificar que el PLC est enviando el estilo inverso correcto al grupo correcto.
Desactivar la comprobacin inversa en el men de configuracin de clula PNS.
APSH-050 WARN Cell IO setup is invalid
(Causa)
Las seales que son requeridas para esta configuracin E/S de clula no han sido
configuradas.
(Solucin) Comprobar los mensajes enviados anteriores al registro de errores para los nombres de
seales incorrectas. Fijar la configuracin E/S de estas seales y arrancar en fro el
controlador.
-1456-
APENDICE D
B-82284ES-3/01
APSH-051 WARN Connect or deassign UOP inputs
(Causa)
El robot no puede moverse mientras las entradas UOP se encuentran en este estado.
(Solucin) Debe conectar alta cada entrada UOP #1, #2, #3, y #8 o desasignar las entradas UOPy
reiniciar el controlador.
APSH-052 WARN Critical UOP inputs are LOW
(Causa)
Las entradas UOP #1 (IMSTP), #2 (HOLD), #3(SFTYFNC), #8 (ENBL) son todas
LOW (bajas).
Todas estas deben ser HIGH (altas) para la operacin de produccin normal.
(Solucin) Solucin: para APSH-051 Conectar o desasignar las entradas UOP.
APSH-054 PAUSE Release SOP E-STOP
(Causa)
Para reanudar la operacin de produccin normal, la herramienta de administracin
requiere que Ud. realice esta accin.
(Solucin) Realizar la accin implicada en el mensaje de error cuando Ud. est preparado para
reanudar la operacin normal.
APSH-055 PAUSE Raise UOP IMSTP input
(Causa)
Para reanudar la operacin de produccin normal, la herramienta de administracin
requiere que Ud. realice esta accin.
(Solucin) Realizar la accin implicada en el mensaje de error cuando Ud. est preparado para
reanudar la operacin normal.
APSH-056 PAUSE Release SOP E-STOP
(Causa)
Para reanudar la operacin de produccin normal, la herramienta de administracin
requiere que Ud. realice esta accin.
(Solucin) Realizar la accin implicada en el mensaje de error cuando Ud. est preparado para
reanudar la operacin normal.
APSH-057 PAUSE Release TP E-STOP
(Causa)
Para reanudar la operacin de produccin normal, la herramienta de administracin
requiere que Ud. realice esta accin.
(Solucin) Realizar la accin implicada en el mensaje de error cuando Ud. est preparado para
reanudar la operacin normal.
APSH-058 PAUSE Pause forced by shell
(Causa)
Este error es emitido para simular un error de PAUSE.
(Solucin) Este error es emitido por una herramienta de administracin durante la operacin
normal, pero no debera ser visible al usuario.
Si Ud. ve este error, informe a su representante de FANUC.
APSH-059 PAUSE Abort forced by shell
(Causa)
Este error es emitido para simular un error de ABORT.
(Solucin) Este error es emitido por DispenseTool durante la operacin normal, pero no debera ser
visible al usuario.
Si Ud. ve este error, informe a su representante de FANUC.
-1457-
APENDICE D
B-82284ES-3/01
APSH-060 WARN Cycle start ignored-not in AUTO
(Causa)
Esto no es un fallo. Este error es emitido cuando al robot es enviado un inicio de ciclo
desde el controlador de clula, pero el robot est en el modo BYPASS (establecido
desde el men del panel Soft) o en modo MANUAL, sin embargo, no se ha iniciado
ningn inicio de ciclo manual.
Tambin es posible que el robot se encuentre en modo MANUAL y el MANUAL
CYCLE (ciclo manual) fuera requerido, pero el estilo enviado por el PLC no coincide
con el especificado en el panel SOFT PANEL.
(Solucin) En la mayora de los casos, este fallo puede ser ignorado.
Este fallo fue introducido para asistir en los problemas de supervisin con el panel soft
en DispenseTool.
Si Ud. est intentando iniciar un ciclo MANUAL , asegrese de que el estilo MANUAL
CYCLE introducido en el men del Soft Panel es el mismo que lo que est emitiendo el
PLC.
APSH-061 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) En la mayora de los casos, este fallo puede ser ignorado.
Este fallo fue introducido para asistir en los problemas de supervisin con el panel soft
en DispenseTool.
Si Ud. est intentando iniciar un ciclo MANUAL, asegrese de que el estilo MANUAL
CYCLE introducido en el men del Panel Soft es el mismo que lo que est emitiendo el
PLC.
APSH-062 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) En la mayora de los casos, este fallo puede ser ignorado.
Este fallo fue introducido para asistir en los problemas de supervisin con el panel soft
en DispenseTool.
Si Ud. est intentando iniciar un ciclo MANUAL, asegrese de que el estilo MANUAL
CYCLE introducido en el men del Panel Soft es el mismo que lo que est emitiendo el
PLC.
APSH-063 PAUSE A HOLD input is active
(Causa)
La tarea actual ha sido detenida pulsando el botn HOLD o estableciendo la entrada
UOP HOLD en LOW.
(Solucin) Liberar el botn HOLD y levantar la entrada UOP HOLD.
APSH-064 PAUSE %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Liberar el botn HOLD y levantar la entrada UOP HOLD.
APSH-065 PAUSE %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Liberar el botn HOLD y levantar la entrada UOP HOLD.
-1458-
APENDICE D
B-82284ES-3/01
APSH-066 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Liberar el botn HOLD y levantar la entrada UOP HOLD.
APSH-070 PAUSE Failed to continue %s
(Causa)
El gestor de errores fue incapaz de continuar la tarea nombrada cuando el usuario
solicit que todas las tareas fueran continuadas.
Esto es probablemente debido a que uno de los E-Stops o botones HOLD estn en
activo.
(Solucin) Desactivar todos los E-Stops y liberar los botones HOLD.
Si no se desea continuar la tarea nombrada, abortar.
APSH-071 PAUSE Failed to pause robot task
(Causa)
Una orden Karel PAUSE_TASK() fall en detener una tarea de la cual el gestor de
errores cree que debera ser detenida.
(Solucin) La tarea que intent detener el gestor de errores era probablemente una utilidad de
sistema, y no se le es permitido detenerse.
Ud. puede probablemente ignorar este fallo sin ningn problema.
APSH-072 PAUSE Failed to abort robot task
(Causa)
Ha fallado el comando Karel ABORT_TASK().
(Solucin) Arrancar en fro el controlador del robot, entonces restaurar manualmente el estado de
produccin.
APSH-073 WARN Servos Locked-out, enable servos
(Causa)
Los Robot servos son excludos.
(Solucin) Activar robot servos.
APSH-074 WARN Disable Teach Pendant
(Causa)
Para reanudar la operacin de produccin normal, Dispensetool requiere que Ud. realice
esta accin.
(Solucin) Realizar la accin implicada en el mensaje de error cuando Ud. est preparado para
reanudar la operacin normal.
APSH-075 WARN Error in accessing TPE:%s
(Causa)
El siguiente error ocurri cuando a los datos asociados con un programa TPE fue
accedido.
(Solucin) Verificar que este programa TPE existe.
Ir a las pginas DETAIL bajo el men SELECT y dar a la tecla NEXT hasta que el robot
permita llevar este modo a END.
APSH-076 WARN Shell could not run:%s
(Causa)
El "shell" intent ejecutar un programa, pero fue parado por el sistema en
funcionamiento.
(Solucin) Asegrese de que el programa existe y que no est ya funcionando o detenido.
Usar la pantalla del PROGRAM STATUS para asegurarse de que no ha excedido el
nmero mximo de tareas.
Abortar todos los programas que no necesiten efectuarse.
-1459-
APENDICE D
B-82284ES-3/01
APSH-077 WARN No positions in %s
(Causa)
Este TPE no contena una posicin para representar HOME, SERVICE, o PURGE.
(Solucin) Si necesita usar las salidas AT PERCH, AT PURGE, o AT SERVICE, programar las
posiciones que necesite en los TPE apropiados.
Si no necesita actualizar estas salidas ignorar esta advertencia.
APSH-078 WARN Shell could not run program
(Causa)
El "shell" intent ejecutar un programa, pero fue parado por el sistema en
funcionamiento.
(Solucin) Asegrese de que el programa existe y que no est ya funcionando o detenido.
Usar la pantalla del PROGRAM STATUS para asegurarse de que no ha excedido el
nmero mximo de tareas.
Abortar todos los programas que no necesiten efectuarse.
APSH-079 WARN No DIN for Auto/Bypass
(Causa)
No se ha definido ninguna entrada Auto/Bypass, sin embargo se esperaba una.
(Solucin) Configurar una entrada Auto/Bypass en el men de entrada E/S de la clula y reiniciar
el robot.
APSH-080 WARN Waiting for Cancel/Continue
(Causa)
El robot est esperando en este momento cancelar o continuar (Wet o Dry) o una entrada
HOME desde el PLC.
(Solucin) Este es un aviso para informar a la persona en la consola de programacin que al PLC
se le ha dado control exclusivo sobre cmo el robot se recuperar del error actual.
APSH-081 WARN Waiting for Cancel
(Causa)
El robot est en la actualidad esperando una introduccin de cancelacin desde el PLC.
El JOB actual ha tenido un fallo tan grave que no puede recuperarse y debe ser abortado
o debe recibir la entrada del UOP inicial (UOP HOME).
(Solucin) Este es un aviso para informar a la persona en la consola de programacin que al PLC
se le ha dado control exclusivo sobre cmo el robot se recuperar del error actual.
APSH-082 WARN No $ERROR_PROG defined
(Causa)
Ningn $ERROR_PROG ha sido definido para este JOB.
Este fallo slo aparecer si la variable Karel [SLERROR]POST_NO_ERRP es
establecida en TRUE (default = FALSE).
(Solucin) Usar la orden TPE ERROR_PROG, bajo "Program Control", para configurar un
programa de error para este JOB.
Esto permitir al robot moverse fuera del rea de trabajo cuando ocurra un error.
APSH-083 WARN No $RESUME_PROG defined
(Causa)
Ningn $RESUME_PROG ha sido definido para este JOB.
(Solucin) Usar la orden TPE RESUME_PROG, bajo "Program Control", para configurar un
programa de reanudacin para este JOB.
Esto permitir al JOB reanudar el programa interrumpido.
-1460-
APENDICE D
B-82284ES-3/01
APSH-084 WARN WARNING - simulated I/O
(Causa)
El robot est efectuando un programa de estilo con uno o ms puertos E/S simulados.
Pueden darse movimientos o acciones inesperados.
(Solucin) Verificar que todos los puntos E/S simulados deberan ser simulados.
Des-simular todos los puertos E/S que no deberan ser simulados.
APSH-090 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Verificar que todos los puntos E/S simulados deberan ser simulados.
Des-simular todos los puertos E/S que no deberan ser simulados.
APSH-091 WARN %s
(Causa)
Colocar el error del soporte, usado para mantener la documentacin para errores de
cambios drsticos.
(Solucin) Verificar que todos los puntos E/S simulados deberan ser simulados.
Des-simular todos los puertos E/S que no deberan ser simulados.
APSH-092 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-093 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-094 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-095 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-096 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-097 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
-1461-
APENDICE D
B-82284ES-3/01
APSH-098 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-099 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-100 WARN %s
(Causa)
Alarma que especifica el sitio causada por cambios hechos para el cliente.
(Solucin) Se ruega consultar a FANUC teniendo en cuenta los cambios especficos hechos para
su sitio.
APSH-110 WARN READ IO parm %s missing
(Causa)
Se ha llamado el READ IO MACRO sin un parmetro que deba ser introducido.
READ IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-111 WARN READ IO parm %s is wrong type
(Causa)
Se ha llamado el READ IO MACRO sin parmetros ilegales.
READ IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-112 WARN signal %s does not exist
(Causa)
Se ha llamado el READ IO MACRO pero la seal no pudo ser encontrada.
READ IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-113 WARN can't fetch signal type
(Causa)
Se ha llamado el READ IO MACRO pero la seal no pudo ser encontrada.
READ IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-114 WARN can't fetch signal number
(Causa)
Se ha llamado el READ IO MACRO pero la seal no pudo ser encontrada.
READ IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-115 WARN can't read signal %s
(Causa)
Se ha llamado el READ IO MACRO pero la seal no pudo ser encontrada.
READ IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
-1462-
APENDICE D
B-82284ES-3/01
APSH-116 WARN Reg %s could not be set
(Causa)
Operacin de registro fallada.
(Solucin) Comprobar si el registro est definido, si se encuentra entre 1-64 y si tiene el valor
correcto.
Se debe abortar todo (ABORT ALL) y reintentar.
APSH-117 WARN Register not defined %s
(Causa)
Esto es slo un mensaje de supervisin.
(Solucin) N/A
APSH-118 WARN WRITE IO parm %s missing
(Causa)
Se ha llamado el WRITE IO MACRO sin un parmetro que deba ser introducido.
WRITE IO(secuencia de nombres de seal, valor de entero a escribir)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-119 WARN WRITE IO parm %s is wrong type
(Causa)
Se ha llamado el WRITE IO MACRO sin parmetros ilegales.
WRITE IO(secuencia de nombres de seal, valor de entero a escribir)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-120 WARN signal %s does not exist
(Causa)
Se ha llamado el WRITE IO MACRO pero la seal no pudo ser encontrada.
WRITE IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-121 WARN can't write signal %s
(Causa)
Se ha llamado el WRITE IO MACRO pero la seal no pudo ser encontrada.
WRITE IO(secuencia de nombres de seal, nmero de registro de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-122 WARN GET IO PORT parm %s missing
(Causa)
Se ha llamado el GET IO MACRO sin un parmetro que deba ser introducido.
GET IO(secuencia de nombres de seal, nmero de puerto de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-123 WARN GET IO PORT parm %s is wrong type
(Causa)
Se ha llamado el GET IO MACRO sin parmetros ilegales.
GET IO(secuencia de nombres de seal, nmero de puerto de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
APSH-124 WARN signal %s does not exist
(Causa)
Se ha llamado el GET IO MACRO pero la seal no pudo ser encontrada.
GET IO(secuencia de nombres de seal, nmero de puerto de enteros)
(Solucin) Comprobar la llamada del MACRO en el programa TP.
-1463-
APENDICE D
B-82284ES-3/01
APSH-125 WARN Forcing Process Enabled
(Causa)
Se ha detectado que el Proceso ha sido desactivado (DISABLED) al comienzo de este
programa de produccin.
Una opcin (o seleccin de configuracin) ha indicado que el Proceso debera ser
forzado (FORCED) al estado activo.
(Solucin) - No elegir forzar (FORCE) el proceso activo.
- Cambiar "Prog Select-Production Check Process" (proceso de comprobacin de la
seleccin de produccin del programa) configurada para NO forzar la Condicin.
- Asegurar que la introduccin del "Process Enabled" est activada al comienzo del
siguiente ciclo de produccin.
APSH-126 PAUSE %s
(Causa)
El robot es detenido.
(Solucin) Mensaje de estado
APSH-127 WARN Repower to activate change.
(Causa)
El lmite de velocidad de la unin ha cambiado.
Este cambio de parmetro requiere que se reinicie el controlador para que tenga efecto.
(Solucin) Desconecte el controlador y vuelva a conectarlo.
APSH-130 WARN Cannot access FR:%s*.DT files
(Causa)
Error ocurrido mientras se acceda al FR: dispositivo. No .dt archivos encontrados.
(Solucin) Los archivos DT deben existir en el FR: dispositivo.
APSH-131 WARN I/O data error: %s
(Causa)
Puerto E/S definido incorrectamente: Tipo ilegal, se usan los datos por defecto.
(Solucin) El archivo DT en el FR: el dispositivo debe ser corregido.
APSH-132 WARN Selected Prog %s not loaded
(Causa)
El nombre del programa que el "shell" requiri para ejecutar no est cargado en el
controlador.
(Solucin) Check PLC->Robot style communication.
Verificar que el nombre del programa especificado fue requerido por el PLC.
Cargar o crear el programa del programa especificado.
APSH-133 WARN Not in safe starting position
(Causa)
El robot ha sido apartado de la posicin donde estaba activada la consola de
programacin.
(Solucin) Llevar al robot de vuelta a la posicin donde la consola de programacin estaba
activada, abortar el programa, o continuar (en movimiento lineal) desde la posicin
donde el robot est posicionado en la actualidad.
APSH-141 PAUSE %s
(Causa)
El robot ha sido apartado de la posicin donde estaba activada la consola de
programacin.
(Solucin) Llevar al robot de vuelta a la posicin donde la consola de programacin estaba
activada, abortar el programa, o continuar (en movimiento lineal) desde la posicin
donde el robot est posicionado en la actualidad.
-1464-
APENDICE D
B-82284ES-3/01
APSH-142 WARN WARNING - System is in dry run
(Causa)
Esto es un aviso para comunicarle que un trabajo de produccin est efectundose con
el proceso desactivado.
(Solucin) No se requiere ninguna.
APSH-143 WARN Robot motion is not enabled
(Causa)
El movimiento del robot y/o la ejecicin del programa no puede suceder a menos que la
entrada 8 de UOP est ON.
(Solucin) Comprobar la configuracin de la E/S de UOP. La entrada 8 del UOP debe estar en ON.
APSH-144 WARN WARNING- Process Complete manually turned on at end of %s
(Causa)
Se ha realizado un 'Force Process Complete' desde el Panel Soft.
(Solucin) Esto es slo un aviso para hacer saber al operador que la Complecin del Proceso fue
activada manualmente.
APSH-150 WARN Gun operation is NOSTROKE
(Causa)
Esto es un aviso para comunicarle que un trabajo de produccin est efectundose con
la pistola establecida en NOSTROKE. No se requiere ninguna.
(Solucin) N/A
APSH-151 WARN Weld operation is NOWELD
(Causa)
Esto es un aviso para comunicarle que un trabajo de produccin est efectundose con
la soldadura establecida en NOWELD. No se requiere ninguna.
(Solucin) N/A
APSH-152 WARN Robot mode must be AUTO
(Causa)
El robot debe encontrarse completamente en modo automtico con el PLC antes de que
pueda darse la operacin de la produccin.
(Solucin) Ir al men SOFT PANEL y establecer el modo del robot en AUTO (mode=AUTO).
APSH-153 WARN Must press SHIFT key too
(Causa)
La tecla "shift" debe ser pulsada cuando est accediendo esta llave (hardkey) de la
consola de programacin.
(Solucin) Pulse la tecla "shift".
-1465-
APENDICE D
B-82284ES-3/01
APSH-154 WARN Only one gun defined
(Causa)
Como el sistema es configurado en la actualidad para un equipo con una sola pistola, no
hay necesidad de establecer el equipo en el que operarn las llaves de GUN y BACKUP;
siempre operarn en la nica pistola.
(Solucin) No se requiere ninguna.
APSH-155 WARN HOME position not recorded
(Causa)
La posicin de inicio HOME no ha sido grabada todava.
La posicin inicial HOME est en el men de Posicin de Referencia.
(Solucin) Ir al men de configuracin SETUP, seleccionar Reference Position del men [TYPE].
Mueva el robot hasta la posicin HOME.
Grabe su posicin de referencia, entonces especificar como inicio vlido "Valid Home".
NOTA
El programa HOME_IO ser iniciado cuando el robot alcance la posicin HOME. Debe editar el
programa HOME_IO correctamente si usa el HOME_IO. Si Ud. no necesita HOME_IO, borre
todos los contenidos (todas las lneas de programa) en el programa HOME_IO.
APSH-156 WARN Specify Home in Ref Pos Menu
(Causa)
Este es slo el mensaje del remedio para ASPH-155.
(Solucin) N/A
APSH-157 WARN Teach pendant must be enabled
(Causa)
La consola de programacin debe ser activada cuando accede esta llave de la consola de
programacin.
(Solucin) Active la consola de programacin.
APSH-158 WARN No group output for weld sched
(Causa)
La salida del grupo que contiene el esquema de soldadura an no ha sido configurada.
(Solucin) Ir al men de salidas del interfaz de soldadura, y editar el ndice del punto E/S del
esquema de soldadura.
Asegurarse de que la salida de grupo ha sido configurada adecuadamente desde el men
de salidas de grupo.
Debe arrancar en fro el controlador cuando cambie este ndice, o redefina la salida de
grupo.
APSH-159 WARN Servos are not ready
(Causa)
Los servos no estn preparados, as que la operacin solicitada no puede ser realizada.
(Solucin) Cuando se reestablezca un fallo, espere a los servos para continuar antes de intentar
ejecutar un programa.
-1466-
APENDICE D
B-82284ES-3/01
APSH-160 WARN Robot not at POUNCE position
(Causa)
El robot no se encuentra en la posicin POUNCE, as que la operacin solicitada no
puede ser realizada.
(Solucin) Re-emita esta solicitud cuando el robot est en AT POUNCE.
APSH-161 WARN No production program is running
(Causa)
El robot no est efectuando en la actualidad un estilo de produccin, as que la operacin
solicitada no puede ser realizada.
(Solucin) Re-emita la solicitud cuando el robot est efectuando un estilo de produccin.
APSH-162 WARN No group output for multi-pressure
(Causa)
La salida de grupo que contiene los ajustes para la vlvula de multi-presin no ha sido
an configurada.
(Solucin) Ir al men "Spot Equipment Intface Output" (salida del interfaz del equipo de puntadas),
y editar el ndice del punto E/S de presin de la vlvula.
Asegrese de que la salida de grupo ha sido configurada adecuadamente desde el men
de Salidas de Grupo.
Debe arrancar en fro el controlador cuando cambie este ndice, o redefina la salida de
grupo.
APSH-163 WARN No motion allowed-gun closed
(Causa)
No se puede dar ningn movimiento porque la pistola est cerrada.
Esto previene que el usuario ponga en funcionamiento un programa mientras la pistola
est cerrada, y dae piezas y/o herramientas.
(Solucin) Abrir la pistola.
APSH-164 WARN Home I/O program %s not loaded
(Causa)
El programa HOME I/O como se especifica desde el men de Configuracin de Clula
no existe y no estaba en funcionamiento.
(Solucin) Ir al men de Configuracin de Clula (Cell Setup menu) y compruebe el nombre del
elemento del men del nombre del macro HOME I/O.
Asegrese de que el archivo especificado existe en el controlador.
Crear un programa por ese nombre o cambie este elemento del men a un programa que
ya existe en el controlador.
-1467-
APENDICE D
B-82284ES-3/01
APSH-165 WARN Invalid Studgun Selection
(Causa)
La configuracin E/S para la pistola de soldadura de pernos adecuada no ha sido an
iniciada.
(Solucin) Proceder a la pantalla de configuracin E/S del equipo de puntadas y configurar las
entradas digitales Gun Present = On/Off, Gun in Nest = On/Off para las 2 pistolas de
pernos. La configuracin adecuada si la pistola 1 est en el robot, es para la pistola 1
(Gun Present = ON, Gun in Nest = OFF y para la pistola 2 (Gun Present = OFF, Gun in
Nest = ON. La configuracin adecuada si la pistola 2 est en el robot, es para la pistola
1 (Gun Present = OFF, Gun in Nest = ON y para la pistola 2 (Gun Present = ON, Gun
in Nest = OFF.
APSH-166 WARN Studgun Change Unsuccessful
(Causa)
El robot fue abortado o interrumpido durante la secuencia de cambio de la pistola de
pernos.
(Solucin) Cambiar manualmente las pistolas de pernos y mover el robot a la posicin inicial
"home".
Pulsar "cycle start" para poner en funcionamiento la produccin.
APSH-167 WARN Move robot home & cycle start
(Causa)
El programa de cambio de pistola de pernos fue interrumpido.
(Solucin) Para reanudar la produccin, el robot debe ser devuelto a su inicio (home) manualmente
y "cycle start" debe ser pulsado para continuar.
APSH-168 WARN No GO for EQP pressure
(Causa)
La salida de grupo que contiene los ajustes para la presin de igualizacin no ha sido
an configurada.
(Solucin) Ir al men "Spot Equipment Intface Output" (salida del interfaz del equipo de puntadas),
y editar el ndice del punto E/S de presin igual. Asegrese de que la salida de grupo ha
sido configurada adecuadamente desde el men de salida de grupo. Debe arrancar en
fro el controlador cuando cambie este ndice, o redefina la salida de grupo.
APSH-169 WARN Uninitialized Stud Macros
(Causa)
Un programa macro para desprender o recoger la pistola de pernos 1 2 no ha sido an
iniciado.
(Solucin) Proceder al Men del Equipo de Puntadas (Spot Equipment Menu) bajo MENUSSETUP e inicie los macros de soldaduras de pernos que slo aparecer si STUD
BACKUP est ENABLED en CONTROLLED START.
-1468-
APENDICE D
B-82284ES-3/01
APSH-170 WARN Check Nest/Changer Inputs
(Causa)
Un programa macro para desprender o recoger la pistola de pernos 1 2 no ha sido an
iniciado.
(Solucin) Proceder al Men del Equipo de Puntadas (Spot Equipment Menu) bajo MENUSSETUP e inicie los macros de soldaduras de pernos que slo aparecer si STUD
BACKUP est ENABLED en CONTROLLED START.
APSH-174 WARN SCR overtemp detected
(Causa)
Una seal overtemp SCR ha sido recibida.
(Solucin) Controlar el recalentamiento del SCR.
APSH-175 WARN Req. Press. Not mapped for WC:%s
(Causa)
La entrada digital de presin requerida no est definida.
(Solucin) Definir la entrada de presin requerida en el men de interfaz de soldadura.
APSH-176 WARN GIN For Weld Press. No definida para WC:%s
(Causa)
El GIN para Weld Pressure (presin de soldadura) no est definido.
(Solucin) Definir la entrada de presin de soldadura en el men de interfaz de soldadura.
APSH-177 WARN Read Press. No definida para WC:%s
(Causa)
La introduccin de presin leda no est definida en el weld interface Menu.
(Solucin) Definir la entrada de presin leda en el men de interfaz de soldadura.
APSH-178 WARN MAP I/O in Weld Interface Menu
(Causa)
No hay [Cause], este es un cdigo de ayuda.
(Solucin) No se requiere ninguna solucin.
APSH-179 WARN Upd. Press. timeout WC:%s
(Causa)
El controlador de soldadura no ha establecido una entrada de Presin Leda a tiempo.
(Solucin) Comprobar si el controlador de soldadura est funcionando correctamente, o
incrementar la temporizacin de la presin de soldadura en el men de inicio del CTRL.
-1469-
APENDICE D
B-82284ES-3/01
APSH-180 WARN Could not communicate to WC
(Causa)
No ha podido leer ninguna E/S desde el controlador de soldadura.
El dispositivo ha debido de estar "offline".
(Solucin) Compruebe si el controlador de soldadura est funcionando correctamente, o
encindalo.
APSH-201 WARN ColRecBegin Automatic Collision Recovery
(Causa)
La recuperacin de la Colisin Automtica est comenzando.
(Solucin) Ninguno Slo un mensaje de aviso.
APSH-202 WARN RecPrgNotFnd Recovery Program not found
(Causa)
La recuperacin de la Colisin Automtica estaba intentando hacer funcionar el
programa de recuperacin.
(Solucin) Asegrese de que el programa est cargado.
APSH-203 WARN ErrRunTask Error running %s
(Causa)
No ha podido ejercer o continuar la tarea.
(Solucin) Comprobar el mensaje de error asociado para el error de tarea y continuar el
procedimiento de recuperacin.
APSH-204 WARN RunRecProg Running recovery prog %s
(Causa)
La recuperacin de la Colisin Automtica est a punto de hacer funcionar el programa
de recuperacin.
(Solucin) Ninguno Slo un mensaje de aviso.
APSH-205 WARN RunOrigProg Running original prog %s
(Causa)
La recuperacin de la Colisin Automtica est a punto de hacer funcionar el programa
original.
(Solucin) Ninguno Slo un mensaje de aviso.
APSH-206 WARN Invalid Group Specified
(Causa)
El grupo especificado para get_home no existe.
(Solucin) Verificar que existe el nmero del grupo especificado.
APSH-207 WARN Invalid Ref Pos Specified
(Causa)
La posicin de referencia especificada para get_home.
(Solucin) Verificar que existe la posicin de referencia especificada.
APSH-208 WARN Failed to check %s
(Causa)
Este error est relacionado con la pantalla de comprobacin de la configuracin de la
produccin.
Este elemento no debera ser comprobado en la configuracin actual.
(Solucin) Pulsar F6,REDO y "cycle power" para actualizar elementos.
-1470-
APENDICE D
B-82284ES-3/01
D.2.26 Cdigos de error CPMO
CPMO-001 ABORT.G internal PLAN error (G: %d^2)
(Causa)
Error interno de software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-002 ABORT.G Internal INTR error (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-003 SERVO2 Internal CP error (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1471-
APENDICE D
B-82284ES-3/01
CPMO-004 ABORT.G Feature not Supported(G:%d^2)
(Causa)
Funcion insoportable.
(Solucin) Abondona la funcion y intenta otra vez.
CPMO-010 SERVO2 Cycle power: JBF size (G: %d^2)
(Causa)
La estructura de datos no es lo suficientemente grande para JBF o para Ext JBF.
(Solucin) Desconectar y conectar.
CPMO-011 SERVO2 JBF INTR_T < Ts (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-012 SERVO2 JBF Len<0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1472-
APENDICE D
B-82284ES-3/01
CPMO-013 SERVO2 JBF Len=0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-014 SERVO2 JBF NULL PTR (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-015 SERVO2 JBF Ts>itp (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1473-
APENDICE D
B-82284ES-3/01
CPMO-016 SERVO2 JBF Ts != 0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-017 SERVO2 JBF INTR_T != itp (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-018 SERVO2 JBF nitp_time < 1 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1474-
APENDICE D
B-82284ES-3/01
CPMO-019 SERVO2 JBF INTR_T > itp (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-020 ABORT.G JBF MEMORY ALLOC ERROR
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-021 SERVO2 JBF Index < 0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1475-
APENDICE D
B-82284ES-3/01
CPMO-022 SERVO2 JBF Ptout > Ptin (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-023 SERVO2 JBF Ptout != Ptin (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-024 SERVO2 JBF (Ptin-Ptout)>itp (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1476-
APENDICE D
B-82284ES-3/01
CPMO-025 SERVO2 JBF Ts < 0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-026 SERVO2 JBF Ts != 0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-027 SERVO2 JBF Ts > itp
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1477-
APENDICE D
B-82284ES-3/01
CPMO-028 SERVO2 JBF TS, Ptin & Ptout mismatch
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-029 SERVO2 JBF Index > 1 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-030 SERVO2 JBF Ptout > npts (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1478-
APENDICE D
B-82284ES-3/01
CPMO-031 SERVO2 JBF Len <= 0 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-032 SERVO2 JBF Set not empty (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-033 SERVO2 JBF not empty (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1479-
APENDICE D
B-82284ES-3/01
CPMO-034 SERVO2 JBF len mismatch (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-035 SERVO2 JBF set not main (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-036 SERVO2 JBF set not valid (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1480-
APENDICE D
B-82284ES-3/01
CPMO-037 SERVO2 JBF not valid (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-038 SERVO2 NonZero JBF Remainder(G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-039 SERVO2 NonZero Chn Remainder(G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1481-
APENDICE D
B-82284ES-3/01
CPMO-040 ABORT.G GTF not empty (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-041 ABORT.G GTF no main filter (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-042 ABORT.G GTF fout too big (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1482-
APENDICE D
B-82284ES-3/01
CPMO-043 ABORT.G GTF num_tf != 1 (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-044 SYSTEM Cycle power: GTFsize (G: %d^2)
(Causa)
El tamao del filtro de tiempo es demasiado pequeo.
(Solucin) Desconectar y conectar.
CPMO-050 ABORT.G No System Variables (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1483-
APENDICE D
B-82284ES-3/01
CPMO-051 ABORT.G No Data Structure (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-052 ABORT.G Stack Underflow (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-053 ABORT.G No Stack(G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1484-
APENDICE D
B-82284ES-3/01
CPMO-054 ABORT.G Stack Overflow (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-055 ABORT.G Stack Not Full (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-056 ABORT.G Corrupt data (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1485-
APENDICE D
B-82284ES-3/01
CPMO-057 ABORT.G Wrong MT or OT (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-058 SYSTEM Cycle power: CHNs (G: %d^2)
(Causa)
No hay suficientes canales para continuar la operacin.
(Solucin) Desconectar y conectar.
CPMO-059 SYSTEM Cycle power: JBFSETs (G: %d^2)
(Causa)
No hay suficientes JBFSETs para continuar la operacin.
(Solucin) Desconectar y conectar.
CPMO-060 SYSTEM Cycle power: JBFs (G: %d^2)
(Causa)
No hay suficientes JBFs para continuar la operacin.
(Solucin) Desconectar y conectar.
CPMO-061 SYSTEM Cycle power: TFs (G: %d^2)
(Causa)
No hay suficientes filtros de tiempo para continuar la operacin.
(Solucin) Desconectar y conectar.
CPMO-062 SYSTEM Cycle power: RSINFOs (G: %d^2)
(Causa)
No hay suficientes RSINFOs para continuar la operacin.
(Solucin) Desconectar y conectar.
CPMO-063 SYSTEM MAINCHN is NULL (G: %d^2)
(Causa)
Error interno El canal principal es NULL.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
Desconectar y conectar.
CPMO-064 SYSTEM MAINCHN is Unknown (G: %d^2)
(Causa)
Error interno El canal principal no es ni JBF ni JF.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
Desconectar y conectar.
-1486-
APENDICE D
B-82284ES-3/01
CPMO-065 ABORT.G MultiGrp RSM STOPPOS MisSyn
(Causa)
Error interno Los grupos no estn sincronizados en una retencin durante la operacin
de reanudacin.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
Reiniciar la alarma y reanudar.
CPMO-066 ABORT.G MultiGrp RsmType MisSyn
(Causa)
Error interno Los tipos de operacin de reanudacin de los grupos difieren.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
Reiniciar la alarma y reanudar.
CPMO-067 ABORT.G MultiGrp RsmInfo Mismatch
(Causa)
Error interno El nmero de elementos rsinfo de los grupos difiere.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
Reiniciar la alarma y reanudar.
CPMO-069 STOP Step mode enabled (G: %d^2)
(Causa)
En la operacin por pasos, no se puede reanudar la operacin.
(Solucin) No hay ninguna accin disponible.
CPMO-070 ABORT.G Channel not empty(G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1487-
APENDICE D
B-82284ES-3/01
CPMO-071 ABORT.G Channel not main (G: %d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-072 ABORT.G Can't resume same path(G: %d^2)
(Causa)
La operacin de reanudacin no puede continuar una trayectoria constante.
(Solucin) Reiniciar la alarma y reintentar.
En este momento, la trayectoria puede diferir de una normal.
CPMO-073 ABORT.G Can't resume same path(G: %d^2)
(Causa)
La operacin de reanudacin no puede continuar una trayectoria constante.
(Solucin) Reiniciar la alarma y reintentar. En este momento, la trayectoria puede diferir de una
normal.
CPMO-074 WARN Can't resume blend path(G: %d^2)
(Causa)
Si existen diferentes tipos de filtro, no se puede realizar una pausa y reanudar en una
trayectoria constante.
(Solucin) Use filtros del tipo jerk blending (JBF) en todos los segmentos de funcionamiento.
CPMO-075 WARN %s
(Causa)
Advertencia.
(Solucin) Comprobar el estado y los ajustes cuidadosamente.
CPMO-076 WARN Can't resume same path(G: %d^2)
(Causa)
La operacin de reanudacin no puede continuar una trayectoria constante.
(Solucin) Reiniciar la alarma y reintentar. En este momento, la trayectoria puede diferir de una
normal.
CPMO-077 WARN Can't resume same path(G: %d^2)
(Causa)
La operacin de reanudacin no puede continuar una trayectoria constante.
(Solucin) Reiniciar la alarma y reintentar. En este momento, la trayectoria puede diferir de una
normal.
-1488-
APENDICE D
B-82284ES-3/01
CPMO-078 WARN Seg Overrun (G: %d^2)
(Causa)
El segmento siguiente est preparado, pero no puede ser usado.
La trayectoria puede diferir de una normal.
(Solucin) Reiniciar la alarma y reintentar.
En este momento, la trayectoria puede diferir de una normal.
CPMO-079 WARN Preplan fail (G: %d^2)
(Causa)
El siguiente segmento est preparado, pero el plan operativo ha sido cancelado.
(Solucin) Reiniciar la alarma y reintentar.
En este momento, la trayectoria puede diferir de una normal.
CPMO-080 SERVO2 EXTChannel not empty(G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-081 SERVO2 EXT JBFSet not empty(G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1489-
APENDICE D
B-82284ES-3/01
CPMO-082 SERVO2 EXT JBF not empty(G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-083 SERVO2 EXT JBF len mismatch(G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-084 SERVO2 EXT JBFSET NULL PTR (G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
-1490-
APENDICE D
B-82284ES-3/01
CPMO-085 SERVO2 EXT JBF NULL PTR (G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-086 SYSTEM Cycle power: EXT JBFs(G:%d^2)
(Causa)
La estructura de datos no es lo suficientemente grande para EXTJBFs.
(Solucin) Desconectar y conectar.
CPMO-087 ABORT.G EXT pt.valid.ext=0(G:%d^2)
(Causa)
Error interno del software.
El sistema ha debido de ser destrudo. Posibles acciones incluyen:
(Solucin 1) Desconectar y conectar.
(Solucin 2) Realizar un arranque inicial y reconfigurar el robot.
(Solucin 3) Comprobar para ver si cualquier sofware opcional o adicional difiere en edicin del
software original. Si el software original es distribudo en mltiples medios, comprobar
si las ediciones de todos los software coinciden. Adems, comprobar si el manual de la
instalacin del software concuerda con la edicin del software a instalar. Si alguna
edicin no concuerda, se necesita reinstalar el software correcto.
(Solucin 4) Adems, comprobar si los opciones no son incompatibles.
(Solucin 5) Recarga todo el software.
(Solucin 6) Si contina el error, grabar el procedimiento de la operacin usado hasta que se cometi
el error, y contactar nuestro centro de servicio en su localidad.
CPMO-090 ABORT.G Invalid MainChn ID (G: %d^2)
(Causa)
Error interno El canal principal ID es inapropriado. Esta alarma no debera haber sido
emitida.
(Solucin) Cancelar la ejecucin del programa y reintentar.
Informar sobre este problema a nuestro centro de servicio en su localidad.
CPMO-091 ABORT.G Invalid JBF MainChn ID (G: %d)
(Causa)
Error interno El ID del canal principal JBF es inapropriado. Esta alarma no debera
haber sido emitida.
(Solucin) Cancelar el programa y reintentar.
Informar sobre este problema a nuestro centro de servicio en su localidad.
-1491-
APENDICE D
B-82284ES-3/01
CPMO-092 ABORT.G JF NewLastAng Mismatch (G: %d^2
(Causa)
Error interno En JF, se ha producido una desalineacin.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
CPMO-093 ABORT.G JB NewLastAng Mismatch (G: %d^2)
(Causa)
Error interno En JB, se ha producido una desalineacin.
(Solucin) Informar sobre este problema a nuestro centro de servicio en su localidad.
CPMO-094 ABORT.G Invalid JBF New ChnId (G: %d^2)
(Causa)
Error interno El canal principal nuevo JBF es inapropriado.
(Solucin) Cancelar la ejecucin del programa y reintentar.
Informar sobre este problema a nuestro centro de servicio en su localidad.
CPMO-095 SERVO Too Large Jnt Cmd (G:%d A:%d)
(Causa)
Error interno La orden de movimiento del eje es demasiado grande.
(Solucin) Cancelar la ejecucin del programa y reintentar.
Informar sobre este problema a nuestro centro de servicio en su localidad.
CPMO-096 SERVO Error: ChnNewAng (G: %d^2)
(Causa)
Error interno La orden de movimiento del eje es demasiado grande.
(Solucin) Cancelar la ejecucin del programa y reintentar.
Informar sobre este problema a nuestro centro de servicio en su localidad.
-1492-
APENDICE D
B-82284ES-3/01
D.2.27 Cdigos de error ARC (ID=53)
ARC-001 WARN Illegal arc equipment config
(Causa)
El atentado fue producido por usar o aadir un nmero de piezas de equipos de
soldadura.
ARC-002 PAUSE.L Illegal arc schedule number
(Causa)
El nmero de schedule de soldadura especificado es ilegal.
(Solucin) Verifique el nmero de schedule especificado.
ARC-003 PAUSE.L No gas flow
(Causa)
No se suministr gas cuando se gener el arco.
(Solucin) Verifique la unidad de gas.
ARC-004 WARN Gas flow after weld
(Causa)
La seal de salida de gas fue apagada, pero la seal de entrada de gas no fue encendida.
(Solucin) Verifique la unidad de gas y la vlvula.
ARC-005 PAUSE.L Gas fault
(Causa)
La seal de fallo de gas fue detectada cuando se soldaba.
(Solucin) Verifique la unidad de gas.
ARC-006 PAUSE.L Wire fault
(Causa)
La seal de fallo de llama fue detectada cuando se soldaba.
(Solucin) Verifique la unidad de gas.
ARC-007 PAUSE.L Water fault
(Causa)
La seal de fallo de agua fra fue detectada cuando se soldaba.
(Solucin) Comprobar el estado de activacin de la soldadura del men del panel Soft Panel y
compararlo con el estado de actividad de la soladdura del controlador de soldadura.
Deben ser iguales.
El panel Soft puede ser accedido usando la consola de programacin.
Pulse MENUS.
Seleccionar Panel Soft. Pulsar F2, Applic.
Verificar la configuracin de E/S y el estado de la pantalla E/S "Spot Equip".
Uso de la consola de programacin.
Seleccione I/O. Pulse F1, [TYPE].
Seleccione "Spot Equip".
ARC-008 PAUSE.L Power supply fault
(Causa)
La seal de potencia fue detectada cuando se soldaba.
(Solucin) Compruebe la unidad de alimentacin.
ARC-010 PAUSE.L Wire stick detected
(Causa)
Ocurri una condicin de rotura de hilo (wire stick).
(Solucin) Asegre el robot y el equipo de soldadura, y despus corte el hilo.
-1493-
APENDICE D
B-82284ES-3/01
ARC-011 PAUSE.L Wire stick, not reset
(Causa)
Se detect una condicin de rotura de hilo, pero no fue reseteada.
Es conveniente deshabilitar el reset de hilo roto.
Verifique si la soldadura TIG est correcta o si la soldadura no fue por su trayectoria,
no se realiz un reset del hilo.
(Solucin) Asegre el robot y el equipo de soldadura, y despus corte el hilo.
ARC-012 PAUSE.L Wire stick reset (s) failed
(Causa)
La condicin de hilo fue detecada, pero fall el reset automtico de hilo cortado.
(Solucin) Asegre el robot y el equipo de soldadura, y despus corte el hilo.
ARC-013 PAUSE.L Arc start failed
(Causa)
No fue detectado el arco en el tiempo establecido despus de que el arc start fue
realizado.
(Solucin) 1 Verifique el hilo y el equipo de soldadura.
2 Ajuste el tiempo de deteccin de arco, usando la pantalla Weld System.
3 Cambie la programacin del arco.
ARC-014 WARN Teach pendant is disabled
(Causa)
Cuando el teach pendant est deshabilitado, la soldadura es posible o la alimentacin
manual de hilo desde el teach pendant.
(Solucin) Active la consola de programacin.
ARC-015 WARN Press shift with this key
(Causa)
La soldadura o la alimentacin de hilo manual fue presionada sin presionar la tecla shift.
(Solucin) Realice esta operacin mientras pulsa la tecla shift.
ARC-016 PAUSE.L Weld by shift FWD is disabled
(Causa)
Se produjo un fallo ejecutando la soldadura desde el teach pendant, cuando la cnsola
de programacin fue desconectado para soldadura.
(Solucin) 1 Ejecute la soldadura desde el panel operador o la unidad de control remota.
2 Habilite la soldadura desde el TP en la pantalla Weld System.
ARC-017 WARN Arc start was disabled
(Causa)
Ocurri un error al ejecutar el comando arc start cuando la soldadura estaba siendo
deshabilitada.
(Solucin 1) SI el teach pendant se habilita, presione la tecla de habilitacin de soldadura en el teach
pendant para habilitar la soldadura.
(Solucin 2) Si el selector de remoto est configurado en la posicin de remoto, encienda las seales
de E/S de soldadura.
(Solucin 3) Verifique en la pantalla de Ejecucin de Test para ver si lock o dry run est habilitada.
ARC-018 PAUSE.L Lost arc detect
(Causa)
Ha sido imposible detectar la seal de deteccin de arco cuando se soldaba.
(Solucin 1) Verifique la unidad de hilo.
(Solucin 2) Verifique la velocidad y el tiempo de arc-off especificado en schedules de soldadura.
-1494-
APENDICE D
B-82284ES-3/01
ARC-019 PAUSE.L Can't read arc detect input
(Causa)
La seal de deteccin de arco no pudo ser detecada.
(Solucin) Verifique que la tarjeta de process I/O est conectada.
ARC-020 PAUSE.L No plan data area available
(Causa)
No hay memoria suficiente para ejecutar los comandos de soldadura.
(Solucin) Reduzca el nmero de programas.
ARC-021 ABORT.L Program aborted while welding
(Causa)
El programa fue eabortado cuando se estaba soldando.
(Solucin) Verifique que la instruccin arc end est puesta.
ARC-022 WARN
(Causa)
La salida analgica excedi del rango permitido por la unidad porque un argumento
especificado en la schedule es superior al rango permitido.
(Solucin) Configure el argumento de soldadura para que est entre el rango permitido.
ARC-023 PAUSE.L Illegal arc schedule type
(Causa)
El valor en el registro especificado en la instruccin arc, no es integer.
(Solucin) Utilice un registro que contenga integer.
ARC-024 WARN Invalid equipment range
(Causa)
La diferencia entre el mximo y el mnimo valor de configuracin de analgicas para el
equipo de soldadura es demasiado pequea.
(Solucin) Incremente la diferencia entre el mximo y mnimo valor de configuracin de
analgicas para el equipo de soldadura, usando la pantalla de Weld Equip.
ARC-025 WARN Invalid A/D or D/A range
(Causa)
EL valor de la variable de sistema $AWEPRR se cambi ilegalmente.
(Solucin) Cambie al valor correcto la variable de sistema $AWEPRR.
ARC-026 WARN Cannot scale AIO while welding
(Causa)
Se provoc un error al modificar la conversin de analgicas cuando se soldaba, pero el
valor de conversin no fu alterado.
(Solucin) Desconecte y vuelva a conectar.
ARC-030 WARN Wire stick is still detected
(Causa)
Se detect una condicin de rotura de hilo despus de un reset.
(Solucin) Asegre el robot y el equipo de soldadura, y despus corte el hilo.
ARC-031 PAUSE.L No motion while welding
(Causa)
El robot se detuvo por un periodo de tiempo superior al especificado en la variable de
sistema $ARC_LOS_TIM cuando se estaba soldando.
(Solucin) Si no necesita parar la operacin del robot, incremente el tiempo de deteccin de arcoff, utilizando la pantalla de Weld Equip, o desconecte la deteccin de arc-off, usando
la pantalla Weld System.
-1495-
APENDICE D
B-82284ES-3/01
ARC-032 PAUSE.L Weld stopped by single step
(Causa)
El modo paso a paso entr cuando se estaba soldando, interrumpiendo la soldadura.
(Solucin) Para continuar soldando, quite el modo paso a paso.
ARC-033 PAUSE.L Override must be 100% to weld
(Causa)
Ocurri un error al conectar la soldadura, utilizando una velocidad del 100%
(Solucin) Utilice la soldadura usando una velocidad del 100%
ARC-034 PAUSE.L Task does not control welding
(Causa)
Cuando se estaba soldando, otra tarea provoc un fallo.
(Solucin) Finalice la tarea que est soldando, o abrtela, despus ejecute la otra tarea.
ARC-035 STOP.L Equipment number isn't set (%s^4,%d^5)
(Causa)
La instruccin de arc no contiene el nmero de equipo.
(Solucin) Se ruega atribuir el nmero del equipo a los datos del programa o a la instruccin de arco.
ARC-036 STOP.L Such equipment mask isn't supported
(Causa)
A esta mscara de equipo no se le presta ayuda ahora.
(Solucin) Se ruega cambiar la mscara de equipo.
ARC-037 WARN Another equipment is inching now
(Causa)
Otro equipo est moviendo el hilo en este momento.
(Solucin) Se ruega detener el movimiento de cable para otro equipo mediante la liberacin de la
tecla"shift" o la del usuario.
ARC -038 STOP.L Already held the another equipment
(Causa)
The time filter size is too small. Una tarea solo puede utilzar un equipo.
(Solucin) Se ruega controlar el equipo por medio de la otra tarea.
ARC -039 STOP.L% s^1 AO(%d^2) is not scaled
(Causa)
La nombrada seal de salida anloga de soldadura no est adecuadamente en escala.
(Solucin) Ajustar la escala de salida anloga de soldadura en la pantalla E/S de soldadura usando
la tecla de funcin CONFIG.
ARC -040 STOP.LMissing I/O: %s^1
(Causa)
La nombrada seal E/S de soldadura no es detectada o configurada adecuadamente.
(Solucin 1) Verificar si el hardware de E/S est conectado y la seal es asignada un nmero de
puerto en la pantalla E/S de soldadura.
(Solucin 2) Use la tecla de funcin CONFIG si la seal no es asignada.
-1496-
APENDICE D
B-82284ES-3/01
ARC -041 STOP.L Weld EQ needs DeviceNet option
(Causa)
Los accesorios de soldadura han sido configurados para usar DeviceNet configurando
los campos $VENDOR_ID, $DEV_TYPE, y $PROD_CODE en la variable de sistema
$AWEPRR a valores que no sean cero. No obstante, la opcin DeviceNet no est
instalada.
(Solucin 1) Aadir la opcin DeviceNet o elegir un modelo de equipo de soldadura que no requiera
DeviceNet.
(Solucin 2) Si el modelo del equipo de soldadura es correcto y no requiere DeviceNet, entonces
configure los campos $AWEPRR mencionados arriba a cero y haga un reinicio.
ARC -042 STOP.L Weld EQ needs Expl Msg option
(Causa)
Los accesorios de soldadura han sido configurados para usar DeviceNet configurando
los campos $VENDOR_ID, $DEV_TYPE, y $PROD_CODE en la variable de sistema
$AWEPRR a valores que no sean cero. No obstante, la opcin Explicit Messaging no
est instalada.
(Solucin 1) Aadir la opcin Explicit Messaging o elegir un modelo de equipo de soldadura que no
requiera DeviceNet.
(Solucin 2) Si el modelo del equipo de soldadura es correcto y no requiere DeviceNet, entonces
configure los campos $AWEPRR mencionados arriba a cero y haga un reinicio.
ARC -043 STOP.L Weld EQ needs DeviceNet board
(Causa)
Los accesorios de soldadura han sido configurados para usar DeviceNet configurando
los campos $VENDOR_ID, $DEV_TYPE, y $PROD_CODE en la variable de sistema
$AWEPRR a valores que no sean cero. No obstante, el hardware DeviceNet no fue
detectado.
(Solucin 1) Aadir el hardware DeviceNet o elegir un modelo de equipo de soldadura que no
requiera DeviceNet.
(Solucin 2) Si el modelo del equipo de soldadura es correcto y no requiere DeviceNet, entonces
configure los campos $AWEPRR mencionados arriba a cero y haga un reinicio.
ARC -044 STOP.L Weld EQ needs DeviceNet defn.
(Causa)
Los accesorios de soldadura han sido configurados para usar DeviceNet configurando
los campos $VENDOR_ID, $DEV_TYPE, y $PROD_CODE en la variable de sistema
$AWEPRR a valores que no sean cero.
Una definicin del dispositivo DeviceNet no pudo ser encontrada para ese producto.
(Solucin) Puede aadir una definicin de DeviceNet para este producto o si el equipo de soldadura
que est usando no presta soporte a DeviceNet, Ud. puede configurar los campos
$AWEPRR mencionados arriba a cero y aplicar un reinicio.
ARC -045 WARN Weld EQ Device is OFFLINE
(Causa)
ArcTool intent comunicar con el Equipo de Soldadura usando la red "DeviceNet
network", pero no pudo porque el enlace no fue establecido adecuadamente.
(Solucin 1) Verificar si el cable de DeviceNet est conectado.
(Solucin 2) Si el selector de remoto est configurado en la posicin de remoto, encienda las seales
de E/S de soldadura.
(Solucin 3) Comprobar el estado de la tarjeta de la pantalla E/S de DeviceNet y el estado del
dispositivo.
-1497-
APENDICE D
B-82284ES-3/01
ARC -046 WARN Weld EQ needs Expl Msg option
(Causa)
Ha habido un error de comunicacin detectado entre el ArcTool y el Equipo de
soldadura (Weld Equipment).
(Solucin 1) Verificar si el Weld Equipment est en ON.
(Solucin 2) Verificar si el cable de DeviceNet est conectado.
(Solucin 3) Comprobar el estado de la tarjeta de la pantalla E/S de DeviceNet y el estado del
dispositivo.
ARC -047 WARN Not allowed during a weld
(Causa)
Se ha intentado realizar una operacin no permitida mientras se ejecutaba o se detena
una soldadura.
(Solucin) Intentar la operacin despus de que el programa finalice o sea abortado.
ARC-048 WARN Auto AI/O setup is unsupported
(Causa)
No se apoya la configuracin Auto AI/O para el mdulo de E/S montado.
Entonces los parmetros no son configurados automticamente.
(Solucin) Verificar el mdulo E/S montado y configurar variables de sistema de $AWEPRR[] en
la pantalla de la variable de sistema manualmente si es necesario.
ARC-049 WARNProcess %d switch to %d failed
(Causa)
ArcTool fallido en cambiar procesos de soldadura.
(Solucin) La fuente de alimentacin de soldadura debe estar en OFF, sin conectar, o los datos en
el segundo proceso pueden ser incorrectos.
ARC -050 WARN Process %d NOT found
(Causa)
ArcTool fallido en encontrar este proceso en la fuente de alimentacin de soldadura.
(Solucin) Entre un nmero diferente o use los parmetros SEARCH y la tecla de funcin.
ARC -051 WARN Weld EQ ONLINE, Version:%6.3f
(Causa)
El ArcTool est comunicando con la fuente de alimentacin de soldadura.
Se muestra el nmero de versin de la fuente de alimentacin.
(Solucin) Este mensaje es para notificacin e informacin. No indica un problema.
ARC -052 WARN Bad %s %s Prc %d
(Causa)
El parmetro indicado est fuera de rango.
(Solucin) Entre un nmero dentro de rango.
ARC -053 WARN NO ramp at process switch (%s^4,%d^5)
(Causa)
No se permite el "Ramping" cuando se anda cambiando los procesos de soldadura.
(Solucin) Complete el cambio de proceso primero, entonces lleve a cabo la "rampa" con otra
instruccin de arc start.
-1498-
APENDICE D
B-82284ES-3/01
ARC -054 STOP.G No motion while arc welding
(Causa)
Se ha apagado una soldadura automticamente porque el movimiento se haba parado
mientras la soldadura duraba ms del tiempo especificado en $awsemgoff.$chk_time.
Esta caracterstica intenta proteger la soldadora de quemaduras accidentales por una
pieza.
(Solucin) Puede incrementar el $awsemgoff.$chk_time para permitir una soldadura ms duradera
sin movimiento.
Tambin se puede desactivar esta caracterstica estableciendo $awsemgoff.$nofltr_off
= FALSE.
Ambos cambios requieren que apague el controlador y lo vuelva a encender.
ARC -055 STOP.L No sync Eq (%s^4,%d^5)
(Causa)
Una instruccin Arc Start especifica sincronizacin con un equipo que no est
realizando un Arc Start.
(Solucin) Determine por qu el equipo de sincronizacin no est inicindose o no usa
sincronizacin.
ARC -056 STOP.L Invalid sync (%s^4,%d^5)
(Causa)
Una instruccin Arc Start especifica sincronizacin con un Equipo que no est
sincronizado
(Solucin) Editar los datos de sincronizacin.
ARC -072 STOP.L Illegal AMR packet
(Causa)
Error interno
(Solucin) A veces este error requiere reiniciar el controlador.
ARC-084 ABORT.L Application process is changed during welding
(Causa)
La aplicacin ha cambiado durante la soldadura.
(Solucin) -Corrija el programa.
ARC -085 STOP.L Incomplete of conversion factor setup
(Causa)
Incompleto el factor de conversin de la seal anloga.
(Solucin) Se ruega configurarlo.
ARC -086 STOP.L Invalid of binary data of conversion factor
(Causa)
Los datos binarios ($AWEPRR.$io_min/max_bin) son invlidos.
La diferencia es cero.
(Solucin) Por favor, establezca el valor correcto.
ARC-087 STOP.L Invalid conversion factor data
(Causa)
Los datos del factor de conversin no son vlidos.
Deben ser completados con ms de 2 tablas por lo menos.
Aunque el valor de la segunda tabla es cero.
(Solucin) Se ruega establecer el factor de conversin con ms de 2 tablas.
ARC-088 STOP.L Over selected AO factor No.
(Causa)
El nmero seleccionado de los datos del factor de conversin AO est por encima del
nmero de la seleccin de datos reales.
(Solucin) Se ruega seleccionar el nmero correcto de los datos del factor de conversin AO.
-1499-
APENDICE D
B-82284ES-3/01
ARC -090 WARN Weld disable by reason[%d]
(Causa)
En esta situacin, la soldadura es desactivada por la siguiente razn
1. En modo Single step
2. En modo de bloqueo de Mquina
3. En modo de funcionamiento en seco
4. No existe tarjeta de E/S
5. No se asigna E/S para soldadura
6. En estado Flush AMR
7. En modo de Aplicacin desactivada
8. En estado de Arco desactivado
9. En estado de Skip welding
10. En modo de estado desactivado por AWDBG
(Solucin) Se ruega retirar la razn especificada para realizar la soldadura.
ARC -091 STOP.L Arc End cannot ramp to position (%s^4,%d^5)
(Causa)
Un programa de soldadura Arc End especificado en un tiempo de 99.0 segundos. Este
valor de tiempo es a veces usado con Arc Starts para indicar la "rampa" durante un
movimiento completo. No se dispone de este tipo de "rampa" para un Arc End. Un
tiempo de 99.0 segundos para un tiempo craterfill de Arc End es muy largo y no se
recomienda. Si se necesita mucho tiempo, 98.0 segundos funcionar sin dar este error.
(Solucin) Use un programa de soldadura diferente para el Arc End o cambie el valor de tiempo a
un valor ms pequeo.
ARC -100 STOP.L SVT: Material de cable sin soporte
(Causa)
El material de cable seleccionado no es apoyado para Servo Torch.
(Solucin) Se ruega seleccionar el material de cable correcto.
ARC -101 STOP.L SVT: TamaUnsupported Wire size
(Causa)
El tamao del cable seleccionado no es apoyado para Servo Torch.
(Solucin) Se ruega seleccionar el tamao de cable correcto.
ARC -102 WARN SVT: Unidad de velocidad sin apoyo
(Causa)
La unidad seleccionada de velocidad de movimiento no es apoyada para Servo Torch.
(Solucin) Se ruega seleccionar la unidad correcta de velocidad de movimiento.
ARC -103 WARN SVT: Fallida conversin de WFS
(Causa)
Fallida la conversin del programa de soldadura para la orden de velocidad de
suministro de cable para Servo Torch.
(Solucin) Si tambin salta otra alarma al mismo tiempo, por favor, comprubela y retire la causa
de alarma. Si no ha saltado otra alarma, ha sucedido un error interno.
ARC -104 STOP.L SVT: Modo de secuencia invlido
(Causa)
Error interno Ha sido enviada la orden de modo de secuencia invlida a Servo Torch.
(Solucin) Error interno Reiniciar para la recuperacin.
-1500-
APENDICE D
B-82284ES-3/01
ARC -105 STOP.L Cannot read WSTK input signal
(Causa)
En el proceso de deteccin de adhesin, puede que los datos de resultado de la deteccin
de adhesin no fueran recibidos del ROBOWELD.
(Solucin 1) En la pantalla de configuracin de puerto, comprobar que el puerto 4 (RS-422) est
establecido para ROBOWELD.
(Solucin 2) Comprobar que el cable de comunicacin entre el suministro de energa para la
soldadura del ROBOWELD y la unidad de control del robot es normal.
(Solucin 3) Incrementar los valores de las variables del sistema $RBWLD_CFG.$WSRCV_TRIES
y $AWEUPR[1].$WSTK_MON_DLY.
(Solucin 4) Si el problema no puede ser corregido por el remedio de arriba, puede que se haya
fundido el rel de dentro de la mquina de soldar. Se ruega contactar con FANUC.
ARC -106 WARN Config of Roboweld is invalid
(Causa)
Esta alarma es emitida cuando el nmero de equipos es incrementado de 1 a 2 con la
mquina 1 configurada con el ROBOWELD en un sistema incorporando la funcin de
multi-equipo. En este caso, no se requiere ninguna accin particular.
Como alternativa, se pueden establecer valores impredecibles en la pantalla de
configuracin del equipo de soldadura o la pantalla de condicin de soldadura debido a
un error en los datos de configuracin del ROBOWELD.
(Solucin) Realizar una operacin de arranque en fro despus de establecer un suministro de
energa para la soldadura diferente a la del ROBOWELD en la pantalla de configuracin
de ArcTool. Despus, realizar otro arranque en fro, y seleccionar el ROBOWELD y
realizar de nuevo una operacin de arranque en fro, entonces configurar cada elemento
otra vez.
ARC -107 STOP.L Roboweld TPSYS Error(%d)
(Causa)
Error interno del ROBOWELD
(Solucin) Reiniciar para la recuperacin.
ARC -120 WARN Enable/Disable Sim mode failed
(Causa)
No se pueden detectar las seales necesarias para el modo de simulacin.
(Solucin) Verificar que las seales AI/O y WI/O son asignadas adecuadamente.
ARC-121 WARN Weld not performed(Sim mode)
(Causa)
El modo de simulacin est activado. Entonces la soldadura real no es realizada.
(Solucin) Esto no es un error. No se necesita hacer nada.
ARC-122 WARN Cannot SIM/UNSIM(%s,Id:%d)
(Causa)
Las seales E/S no fueron configuradas para simular o no simular apropiadamente
cuando el modo de simulacin est activado/desactivado.
(Solucin) Verificar que las seales AI/O y WI/O son asignadas adecuadamente.
ARC -123 SYSTEM Memory size is too small
(Causa)
El tamao de la memoria es demasiado pequeo para tener una zona de memoria para
datos necesarios.
(Solucin) Cambie el mdulo de la memoria por el que tenga el tamao apropiado y realice inicio
INIT.
-1501-
APENDICE D
B-82284ES-3/01
ARC -124 WARN EQ%d E:%d %s
(Causa)
El "weld equipment" ha informado sobre un error.
(Solucin) Consulte el manual del equipo de soldadura.
ARC -140 SYSTEM MCC I/O parameter wrong(E:%d)
(Causa)
El parmetro de configuracin para la asignacin MMC I/O es errneo.
(Solucin) Compruebe los parmetros.
ARC -141 STOP.G MCC stick detected(E:%d)
(Causa)
El MCC dentro del bastidor del ROBOWELD se ha fundido.
(Solucin) Reemplazar el MCC dentro del bastidor del ROBOWELD si se ha fundido el MCC.
ARC -142 STOP.G MCC monitor abnormal(E:%d)
(Causa)
El MCC dentro del bastidor del ROBOWELD no puede ser encendido.
(Solucin) Reemplazar el MCC dentro del bastidor del ROBOWELD si el MCC es anormal.
ARC -143 STOP.G Power supply/feeder com alarm(E:%d)
(Causa)
En el suministro de energa la comunicacin entre la tarjeta de operaciones y la de
control fueron desconectadas.
(Solucin 1) Por favor, compruebe los fusibles [For feeder: 3A(FU2)/8A(FU3)].
Si se han fundido los fusibles, se ruega, llevar a cabo el siguiente remedio.
- Cambiar el cable del encoder y fusibles.
- Cambiar la tarjeta del encoder en el alimentador del cable, y cambiar fusibles.
(Solucin 2) Cambiar la tarjeta Gabana.
(Solucin 3) Cambiar la tarjeta de operaciones en el suministro de energa de soldadura.
ARC -144 STOP.G PS internal com-error(E:%d)
(Causa)
El interior del equipo de soldadura es anormal.
(Solucin) Si una de estas alarmas es emitida incluso cuando se cambia la alimentacin del
suministro de energa de la soldadura en OFF y despus en ON, se ruega contactar con
FANUC.
ARC -145 STOP.G PS internal abnormal com-data(E:%d)
(Causa)
El interior del equipo de soldadura es anormal.
(Solucin) Si una de estas alarmas es emitida incluso cuando se cambia la alimentacin del
suministro de energa de la soldadura en OFF y despus en ON, se ruega contactar con
FANUC.
-1502-
APENDICE D
B-82284ES-3/01
ARC -146 STOP.G Can't use Pulse in CO2(E:%d)
(Causa)
Si se configura CO2 en la pantalla del Arc Welding Equipment, se especifica la
soldadura en el modo de impulso. El modo de impulso se puede indicar de la siguiente
manera:
Estas alarmas son emitidas con un "welding equipment" (ROBOWELD DP) que
permite la especificacin de impulso.
- "Disable the pulse mode" en la pantalla de detalle del programa de soldadura es
configurado en 0
(para activar el modo de impulso).
- La instruccin de Arco para especificacin de la condicin directa
Ejemplo)
Arc Start[16V, 140A], Arc End[16V, 140A, 0.0sec]
(Solucin) Desactivar el modo de impulso como se describe abajo.
- Configurar "Disable the pulse mode" en la pantalla de detalle del programa de
soldadura en 1.
Cuando se use una instruccin de arco con especificacin de condicin directa, usar una
instruccin de arco para la especificacin del nmero de programa de soldadura.
Ejemplo)
Arc Start[16V, 140A] -> Arc Start[1]
Por debajo del programa de calentamiento, el modo de impulso est activado como
estndar en todos los casos.
Modificar la siguiente variable del sistema cuando configure CO2 y use la funcin de
calentamiento (estndar : desactivado) con el ROBOWELD DP:
$RBGE_PLSTBL[33] = 0 -> 1
ARC -147 STOP.G Can't use Pulse in this setup(E:%d)
(Causa)
El modo de impulso no puede ser usado con la combinacin de los siguientes elementos
configurados en la pantalla del Arc Welding Equipment:
- Mtodo de soldadura (CO2, MAG, MIG)
- Dimetro de cable
- Material de cable
(Solucin) Realice una configuracin til. Adems, desactive el modo de impulso. Para una
combinacin til, consulte el manual de mantenimiento.
Para el mtodo de desactivacin del modo de impulso, consultar el remedio ARC-146
y alarmas ARC-148.
-1503-
APENDICE D
B-82284ES-3/01
ARC -148 STOP.G Can't use Pulse in CO2
(Causa)
Si se configura CO2 en la pantalla del Arc Welding Equipment, se especifica la
soldadura en el modo de impulso.
El modo de impulso se puede indicar de la siguiente manera:
Estas alarmas son emitidas con un "welding equipment" (ROBOWELD DP) que
permite la especificacin de impulso.
- "Disable the pulse mode" en la pantalla de detalle del programa de soldadura es
configurado en 0
(para activar el modo de impulso).
- La instruccin de Arco para especificacin de la condicin directa
Ejemplo)
Arc Start[16V, 140A], Arc End[16V, 140A, 0.0sec]
(Solucin) Desactivar el modo de impulso como se describe abajo.
- Configurar "Disable the pulse mode" en la pantalla de detalle del programa de
soldadura en 1.
Cuando se use una instruccin de arco con especificacin de condicin directa, usar una
instruccin de arco para la especificacin del nmero de programa de soldadura.
Ejemplo)
Arc Start[16V, 140A] -> Arc Start[1]
Por debajo del programa de calentamiento, el modo de impulso est activado como
estndar en todos los casos.
Modificar la siguiente variable del sistema cuando configure CO2 y use la funcin de
calentamiento (estndar : desactivado) con el ROBOWELD DP:
(Solucin) $RBGE_PLSTBL[33] = 0 -> 1
ARC -149 STOP.G Can't use Pulse in this setup
(Causa)
El modo de impulso no puede ser usado con la combinacin de los siguientes elementos
configurados en la pantalla del Arc Welding Equipment:
- Mtodo de soldadura (CO2, MAG, MIG)
- Dimetro de cable
- Material de cable
(Solucin) Realice una configuracin til. Adems, desactive el modo de impulso. Para una
combinacin til, consulte el manual de mantenimiento.
Para el mtodo de desactivacin del modo de impulso, consultar el remedio ARC-146
y alarmas ARC-148.
ARC-150 STOP.G Invalid op. in weld(0x%X)(E:%d)
(Causa)
Se ha producido un intento para realizar procesos prohibidos durante la soldadura.
(Solucin) Comprobar el programa y la pantalla de seal de soldadura para ver si se dirige
directamente una seal relacionada con la soldadura.
ARC-151 STOP.G Invalid wire size(E:%d)
(Causa)
Este dimetro de cable no puede ser usado en la combinacin actual de la configuracin
de soldadura (mtodo de soldadura, material de cable).
(Solucin) Establecer un tamao de cable adecuado.
ARC -152 STOP.G Invalid weld process(E:%d)
(Causa)
Es usado un dimetro de cable, mtodo de soldadura (CO2 o MAG), o combinacin de
material de cable no apoyada por ROBOWELD.
(Solucin) Compruebe la configuracin.
-1504-
APENDICE D
B-82284ES-3/01
ARC -153 STOP.G Invalid wire material(E:%d)
(Causa)
Es usado un dimetro de cable, mtodo de soldadura (CO2 o MAG), o combinacin de
material de cable no apoyada por ROBOWELD.
(Solucin) Compruebe la configuracin.
ARC -154 STOP.G Invalid Arc Loss Time(E:%d)
(Causa)
Esta alarma es emitida cuando el tiempo de la prdida de arco es demasiado corto o
demasiado largo.
(Solucin) Compruebe la configuracin.
ARC -155 STOP.G Comm. Timeout(E:%d)
(Causa)
Se ha producido un error de comunicacin como por ejemplo un fallo que se recibe a
tiempo de una reaccin del welding equipment.
(Solucin) Compruebe lo siguiente:
Compruebe si el historial de alarmas indica otras alarmas.
Una alarma puede parar temporalmente la comunicacin con el equipo de soldadura.
Reiniciando una alarma tal, puede ser reanudada la comunicacin.
Cuando la comunicacin es reanudada, se indica ARC-177 "RoboWeld(E:%d) reset
complete".
Comprobar si el equipo de soldadura incorporado est activado y si hay alimentacin
energtica.
Comprobar si el cable de comunicacin del welding equipment incorporado est
conectado correctamente.
ARC -156 SYSTEM RoboWeld Error(0x%X, %d)
(Causa)
Se ha producido un error interno.
(Solucin) Se ruega llamar al servicio de FANUC.
ARC -157 STOP.G Receive error(0x%X)(E:%d)
(Causa)
Esta alarma se emite cuando el controlador recive fechas invlidas del equipo de
soldadura incorporado para una causa como una rotura del cable de comunicacin.
(Solucin) Comprobar la conexin del cable del equipo de soldadura incorporado.
(Solucin) Comprobar si el ruido se ha generado cerca. Si se ha generado el ruido, reducir ste.
Para usar ncleos de ferrita con el cable de comunicacin, se ruega llamen al servicio
de FANUC.
ARC -158 STOP.G 1st currency (E:%d)
(Causa)
Ha sucedido un error primario de sobrecarga.
(Solucin) Comprobar la fuente de corriente del controlador.
ARC -159 STOP.G 2nd currency (E:%d)
(Causa)
Se ha producido un corto en el circuito secundario, o se est consumiendo una
sobrecarga excediendo el mximo valor.
(Solucin) Apagar el interruptor, corregir la causa del corto o sobrecarga.
-1505-
APENDICE D
B-82284ES-3/01
ARC -160 STOP.G Temperature alarm(E:%d)
(Causa)
La temperatura dentro del equipo de soldadura en el bastidor ha incrementado ms all
del mximo valor permitido.
(Solucin) No apagar el interruptor de corriente en el frente del bastidor hasta que la temperatura
interior descienda.
Corregir cualquier causa para el aumento de temperatura
(como un factor de servicio excesivo y materia extraa cerca del lado del bastidor).
La causa puede ser una sobrecarga. Revisar la condicin de uso.
ARC -161 STOP.G High voltage(E:%d)
(Causa)
El voltaje de entrada es superior al rango permitido.
(Solucin) Apagar el interruptor de corriente en el frontal del bastidor.
Despus, ajustar el voltaje de entrada dentro del +10% del voltaje estimado entonces
encender el interruptor de corriente.
ARC -162 STOP.G Low voltage(E:%d)
(Causa)
El voltaje de entrada es inferior al rango permitido.
(Solucin) Apagar el interruptor de corriente en el frontal del bastidor.
Despus, ajustar el voltaje de entrada dentro del -10% del voltaje estimado entonces
encender el interruptor de corriente.
ARC-163 STOP.G Start signal error(E:%d)
(Causa)
Deteccin la seal de arranque abnormal.
(Solucin) Comprobar la seal de inicio.
ARC-164 STOP.G Power source error(E:%d)
(Causa)
Se ha detectado un fallo en el suministro trifsico de corriente.
(Solucin) Comprobar la fuente de corriente del controlador.
Comprobar si se ha roto el cable de conexin del alimentador o el cable de deteccin de
voltaje, y tambin comprobar si el fusible para el cable de deteccin de voltaje se ha
fundido.
(Si se ha fundido el fusible, el cable de corriente en el lado del soplete puede estar a
punto de romperse.)
ARC -165 STOP.G EQ is detached(E:%d)
(Causa)
En la pantalla de programacin del puerto, el puerto de comunicacin para el equipo de
soldadura incorporado no est programado para ROBOWELD.
(Solucin) En la pantalla de programacin del puerto, el puerto de comunicacin para el equipo de
soldadura incorporado no est programado para ROBOWELD.
ARC -166 STOP.G Comm. stopped in weld(E:%d)
(Causa)
Durante la soldadura, la comunicacin con el equipo de soldadura se detuvo por un
fallo.
(Solucin) Esta alarma es una alarma secundaria emitida en conexin con otra alarma.
Como otra alarma ya se ha emitido, comprobar el historial de alarmas.
ARC -167 SYSTEM I/O asginment overlap(%d)(E:%d)
(Causa)
Las seales para ROBOWELD no pueden ser asignadas con normalidad.
(Solucin) Comprobar si WI/WO y AI/AO son usados en la asignacin de otros dispositivos E/S.
-1506-
APENDICE D
B-82284ES-3/01
ARC-168 SYSTEM I/O error(%d)(%d, E:%d)
(Causa)
Las seales para ROBOWELD no pueden ser iniciadas.
(Solucin) Comprobar si WI/WO y AI/AO son usados en la asignacin de otros dispositivos E/S.
ARC-169 STOP.G Invalid wire op.(E:%d)
(Causa)
Esta alarma se ha dado cuando el cambio entre el suministro normal y la retraccin es
demasiado rpido en la operacin del suministro de cable.
(Solucin) Si se da esta alarma durante la soldadura, se puede activar la retraccin del cable hasta
que se termine de soldar. Compruebe la configuracin.
ARC -170 STOP.G Detect Arc OFF(E:%d)
(Causa)
Se ha detectado el estado de arc loss.
(Solucin) Comprobar la conexin del cable del equipo de soldadura incorporado.
ARC -171 STOP.G Unified data RCV error(%d,0x%X)(E:%d)
(Causa)
Se han recibido datos unificados invlidos del equipo de soldadura integrado debido a
un error de comunicacin.
(Solucin) Comprobar la conexin del cable del equipo de soldadura incorporado.
ARC -172 WARN Warning, Rcv(0x%X)(E:%d)
(Causa)
Se han recibido datos invlidos del equipo de soldadura integrado debido a un error y a
un ruido.
(Solucin) Comprobar la conexin del cable del equipo de soldadura incorporado.
Comprobar si el ruido se ha generado cerca. Si se ha generado el ruido, reducir ste.
Para usar ncleos de ferrita con el cable de comunicacin, se ruega llamen al servicio
de FANUC.
ARC -173 WARN Warning, Retry(0x%X)(E:%d)
(Causa)
Se han retransmitido datos desde el controlador al equipo de soldadura integrado debido
a un error de comunicacin y a un ruido.
(Solucin) Comprobar la conexin del cable del equipo de soldadura incorporado.
Comprobar si el ruido se ha generado cerca. Si se ha generado el ruido, reducir ste.
Para usar ncleos de ferrita con el cable de comunicacin, se ruega llamen al servicio
de FANUC.
ARC -174 WARN Warning, NAK for(0x%X)(E:%d)
(Causa)
La retransmisin de datos fue requerida desde el equipo de soldadura integrado debido
a un error de comunicacin y a un ruido.
(Solucin) Comprobar la conexin del cable del equipo de soldadura incorporado.
Comprobar si el ruido se ha generado cerca. Si se ha generado el ruido, reducir ste.
Para usar ncleos de ferrita con el cable de comunicacin, se ruega llamen al servicio
de FANUC.
-1507-
APENDICE D
B-82284ES-3/01
ARC -175 STOP.G Signal change is ignored(E:%d)
(Causa)
When communication between the controller and built-in welding equipment is
disabled as in a case where the setting of the communication port of the controller for
the ROBOWELD is changed, arc welding was performed or the setting of the welding
equipment was changed.
(Solucin) Si la configuracin de la comunicacin es cambiada, restablecer la configuracin para
que as la comunicacin con el ROBOWELD pueda ser reiniciada.
ARC-176 WARN No sysvar $RBWLD for EQ:%d
(Causa)
Cuando se configuran mltiples equipos de soldadura, la configuracin de la variable
del sistema para el ROBOWELD es incorrecta.
(Solucin) Seleccionar de nuevo un ROBOWELD en la pantalla de configuracin del ArcTool.
ARC-177 WARN RoboWeld(E:%d) reset complete
(Causa)
Este mensaje indica que el equipo de soldadura integrado ha sido iniciado.
(Solucin) Este mensaje no indica ningn fallo. No se necesita ninguna accin.
Este mensaje es visualizado cuando se enciende en "ON" o cuando la configuracin del
puerto de comunicacin del controlador para el ROBOWELD es cambiado.
ARC -178 STOP.G Arc short alarm(E:%d)
(Causa)
El electrodo de soldar ha sufrido un cortocircuito.
(Solucin) Se ruega corregir la instruccin cuando se confirma la distancia de la pieza cerca de la
punta.
ARC -179 STOP.G Power supply com alarm(E:%d)
(Causa)
Esta alarma ocurre cuando la comunicacin entre la tarjeta de control del equipo de
soldadura y el controlador del robot se detiene.
(Solucin 1) Si esta alarma sucede con ARC-143, se ruega utilizar el remedio para ARC-143.
(Solucin 2) Si esta alarma sigue sucediendo despus de reiniciar el sistema, comprobar el cableado
entre el controlador y el suministro de corriente de la soldadura. Si no se encuentra el
problema, comprobar la tarjeta de control del suministro de energa.
ARC -180 STOP.G Gabana alarm(E:%d)
(Causa)
Esta alarma sucede cuando se detecta el motor del suministrador de cable rotando a una
velocidad excesivamente alta (excediendo la velocidad mxima).
(Solucin) Compruebe el cableado del suministrador de cable.
ARC-181 STOP.G Encoder alarm(E:%d)
(Causa)
El motor del suministrador de cable no est rotando con normalidad, o se ha detectado
una desconexin de seal del encoder.
(Solucin) Corregir la causa como un atasco del sistema del suministro del cable, entonces apagar
y despus encender el interruptor en el frente del bastidor. Despus, llevar a cabo el
movimiento del cable desde la consola de programacin.
Si se ha producido esta alarma cuando el motor est rotando, el cableado del encoder
est roto, o el encoder est daado.
-1508-
APENDICE D
B-82284ES-3/01
ARC-182 STOP.G Motor alarm(E:%d)
(Causa)
Se espera que el motor del suministrador de cable se haya detenido.
No obstante, la rotacin del motor ha sido detenida.
(Solucin) Si realmente el motor est rotando, ha debido de fallar la tarjeta del circuito impreso en
el suministrador de cable.
ARC -184 STOP.G Run signal alarm(E:%d)
(Causa)
El interior del suministrador de energa de la soldadura debe estar defectuoso.
(Solucin) Si se sigue dando esta alarma despus del reinicio de corriente, se ruega llamar al
servicio de FANUC.
ARC -188 STOP.G External emergency input(E:%d)
(Causa)
La seal de stop de emergencia es aplicada desde el dispositivo externo conectado a la
terminal de plantilla.
(Solucin) Apagar el interruptor y corregir la causa para la aplicacin de la seal del stop de
emergencia desde el dispositivo externo. Despus, encender el interruptor de corriente.
ARC -189 STOP.G External input1(E:%d)
(Causa)
Esta alarma sucede cuando la seal 1 de stop provisional es aplicada desde el dispositivo
externo conectado a la terminal de la plantilla.
(Solucin) Compruebe la conexin del dispositivo externo.
ARC -190 STOP.G External input2(E:%d)
(Causa)
Esta alarma sucede cuando la seal 2 de stop provisional es aplicada desde el dispositivo
externo conectado a la terminal de la plantilla.
(Solucin) Compruebe la conexin del dispositivo externo.
ARC -191 STOP.G Memory alarm(E:%d)
(Causa)
El interior del suministrador de energa de la soldadura debe estar defectuoso.
(Solucin) Si la alarma sigue sucediendo despus de apagar el interruptor de corriente y despus
encender, se ruega llamar al servicio de FANUC.
ARC-192 STOP.G CPU alarm(E:%d)
(Causa)
Weld power supply CPU error.
(Solucin) Desconecte de la corriente e intntelo de nuevo. Si vuelve a suceder la misma alarma, por
favor llame al servicio de FANUC.
ARC-193 STOP.G Arc start alarm(E:%d)
(Causa)
La operacin de inicio de Arco no es iniciada en 4 segundos tras un intento de inicio de
arco.
Cuando es detectado un error de inicio de arco se detienen automticamente la salida de
la corriente de la soldadura, la rotacin del motor del suministrador de cable y la salida
de gas.
(Solucin) Corregir la causa mediante la referencia de diagnosis inicial de errores de soldadura.
-1509-
APENDICE D
B-82284ES-3/01
ARC -195 STOP.G Not support weld type(E:%d)
(Causa)
La combinacin de los siguientes elementos configurados en la pantalla del equipo de
soldadura de Arco es inutilizable:
- Mtodo de soldadura (CO2, MAG, MIG)
- Dimetro de cable
- Material de cable
(Solucin) Realice una configuracin til.
ARC -196 WARN Loading weld type ...(E:%d)
(Causa)
Esta alarma aparece cuando se est ejecutando una rden de actualizar un valor de datos
de soldadura dentro del equipo de soldadura integrado a un valor apropiado si
cualquiera del "Welding method", "Wire diameter", y "Wire material" es modificado en
la pantalla del equipo de soldadura de Arco.
(Solucin) Esto no es una alarma real. Espere un momento.
ARC -197 WARN Complete loading weld type(E:%d)
(Causa)
Esta alarma aparece cuando se completa una rden de actualizar un valor de datos de
soldadura dentro del equipo de soldadura integrado a un valor apropiado si cualquiera
del "Welding method", "Wire diameter", y "Wire material" es modificado en la pantalla
del equipo de soldadura de Arco.
(Solucin) Esto no es una alarma real. Espere un momento. Incluso si se indica este mensaje, la
actualizacin de los datos de soldadura se realiza entre 5 y 10 segundos adicionales
dentro del equipo de soldadura integrado. Se ruega utilizar despus de que ese perodo
de tiempo haya pasado.
ARC-198 STOP.G Not support weld type
(Causa)
La combinacin de los siguientes elementos configurados en la pantalla del equipo de
soldadura de Arco es inutilizable:
- Mtodo de soldadura (CO2, MAG, MIG)
- Dimetro de cable
- Material de cable
(Solucin) Realice una configuracin til.
ARC-199 WARN This weld EQ isn't supported(E:%d)
(Causa)
El equipo de soldadura conectado no se puede usar.
O bien, la tarjeta de circuito impreso dentro del equipo de soldadura no es suministrada
por FANUC.
(Solucin) Use un equipo de soldadura suministrado por FANUC.
Como alternativa, se ruega contactar con FANUC para reemplazar la tarjeta de circuito
impreso dentro del equipo de soldadura por una tarjeta de circuito impreso correcta.
-1510-
APENDICE D
B-82284ES-3/01
ARC -200 WARN Arclink ch%d heartbeat timeout
(Causa)
El master del bus del Arclink no ha respondido a un requerimiento de pulso dentro del
perodo de tiempo mximo. Se ha reajustado el canal.
(Solucin) Comprobar las conexiones del Arclink y de los dispositivos del controlador de
soldadura que se encuentran en la red del Arclink.
ARC -201 WARN Arclink ch%d obj #%d no resp
(Causa)
Un dispositivo en el Arclink no ha respondido a un requerimiento dentro del perodo de
tiempo mximo. Se ha reajustado el canal.
(Solucin) Comprobar las conexiones del Arclink y de los dispositivos del controlador de
soldadura que se encuentran en la red del Arclink.
ARC -202 WARN Arclink ch%d obj #%d error resp
(Causa)
Un dispositivo en el Arclink ha enviado una respuesta de error inesperado a un mensaje
de requerimiento. Se ha reajustado el canal.
(Solucin) Comprobar las conexiones del Arclink y de los dispositivos del controlador de
soldadura que se encuentran en la red del Arclink.
ARC -203 WARN Arclink ch%d reset by master
(Causa)
El master del bus del Arclink ha detectado un error u otra condicin que requiere el
reajuste de la red del Arclink. Esto puede ser algo normal si se ha conectado en la red
un dispositivo nuevo.
(Solucin) Si pasa esto por sorpresa, entonces comprobar las conexiones y otros dispositivos en la
red del Arclink.
ARC-204 WARN Arclink ch%d available
(Causa)
El reajuste del Arclink y la secuencia de iniciacin han sido completados.
(Solucin) La red del Arclink est lista para la soldadura.
ARC -205 WARN Arclink ch%d h/s event lost
(Causa)
El mensaje del evento sobre la alta velocidad que se esperaba durante la soldadura ha
fallado en llegar a tiempo.
(Solucin) La red del Arclink se ha reajustado automticamente. Si este error persiste, indica un
problema con la red de comunicaciones o el equipo de soldadura.
ARC -206 WARN Arclink ch%d too many errors
(Causa)
El interfaz del Arclink ha detectado demasiados errores en la red del CANbus.
Esto es causado normalmente por ruido o malas conexiones.
(Solucin) Comprobar las conexiones de la red del Arclink y las protecciones.
-1511-
APENDICE D
B-82284ES-3/01
ARC -207 WARN Arclink ch%d no bus power
(Causa)
El interfaz del Arclink ha detectado demasiados errores en la red del CANbus.
Esto es causado normalmente por ruido o malas conexiones.
(Solucin) Comprobar las conexiones de la red del Arclink y las protecciones.
ARC -208 WARN Arclink ch%d no nodes on bus
(Causa)
El interfaz del Arclink no est detectando cualquier otro dispositivo en la red del
CANbus.
(Solucin) Comprobar las conexiones de cable del Arclink y asegrese de que el equipo de
soldadura est tambin conectado y con corriente.
ARC-209 WARN Arclink ch%d bus errors
(Causa)
El interfaz del Arclink est detectando un alto nmero de errores en la red.
Esto no es malo de momento, pero indica problemas potenciales en la red.
(Solucin) Comprobar las conexiones de cable del Arclink y fuentes de ruido.
ARC -210 WARN Arclink ch%d network flooded
(Causa)
El interfaz del Arclink es incapaz de emitir mensajes debido a demasiado trfico en la
red.
(Solucin) Reiniciar el suministro de corriente del controlador del robot y del controlador de
soldadura.
ARC -211 WARN Arclink ch%d comm error %d
(Causa)
El interfaz del Arclink ha detectado una condicin de error fatal y ha reiniciado la red
de comunicaciones.
(Solucin) Si este problema persiste, contactar al apoyo tcnico.
-1512-
APENDICE D
B-82284ES-3/01
D.2.28 Alarma TAST ( ID = 47 )
TAST-000 WARN Unknown error (TAST00)
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-001 WARN TAST global vars failure
(Causa)
No se ha cargado ninguna variable del sistema para el detector de arco.
(Solucin) Conecte la potencia mediante el inicio controlado e inicialice "Motion Software Parts."
TAST-002 PAUSE.G TAST error IO allocation
(Causa)
Se ha producido un error al intentar ubicar la memoria de E/S.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-003 PAUSE.G TAST IO initialization failed
(Causa)
Se ha producido un error al intentar ubicar una seal analgica.
(Solucin) Se ha producido un error al intentar inicializar la tarjeta de circuito impresa de E/S.
TAST-004 PAUSE.G TAST IO failed
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-005 WARN TAST time tick missing
(Causa)
Es un error interno de software.
(Solucin) Aumente la frecuencia o el periodo de muestra.
TAST-006 PAUSE.G TAST memory dispose failure
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-007 PAUSE.G TAST PRM saving failure
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-008 PAUSE.G TAST incorrect schedule num
(Causa)
El nmero de programa del detector de arco indicado no es correcto.
(Solucin) Corrija el nmero de programa.
-1513-
APENDICE D
B-82284ES-3/01
TAST-009 PAUSE.G TAST weave freq is too low
(Causa)
La frecuencia pendular es demasiado baja.
(Solucin) Aumente la frecuencia.
TAST-010 PAUSE.G TAST software error (SRIF)
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-011 PAUSE.G TAST software error (PMPT)
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-012 PAUSE.G TAST software error (INTP)
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar la potencia.
TAST-013 PAUSE.G TAST software error
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar.
TAST-014 PAUSE.G TAST weave freq is too high
(Causa)
La frecuencia pendular es demasiado elevada.
(Solucin) Reduzca la frecuencia.
-1514-
APENDICE D
B-82284ES-3/01
D.2.29 Alarma WEAV ( ID = 45 )
WEAV-000 WARN Unknown error (WV00)
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar.
WEAV-001 WARN Weave global variable failure
(Causa)
Es un error interno de software.
(Solucin) Tras completar el inicio controlado, inicialice la parte de software de movimiento.
WEAV-002 PAUSE.G Weave motion data missing
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar.
WEAV-003 PAUSE.G Weave error allocating data
(Causa)
No hay suficiente memoria.
(Solucin) Elimine los archivos que no necesite.
WEAV-004 PAUSE.G Weave system variable failure
(Causa)
No se han cargado o inicializado las variables del sistema de movimiento pendular.
(Solucin) Tras completar el inicio controlado, inicialice las variables del sistema.
WEAV-005 PAUSE.G Weave pattern does not exist
(Causa)
Es un error interno de software.
(Solucin) Elimine el error incorrecto.
WEAV-006 PAUSE.G Weave illegal schedule number
(Causa)
El nmero de programa e movimiento pendular no es vlido.
(Solucin) Introduzca un nmero de programa que est dentro del rango vlido.
WEAV-007 PAUSE.G Weave illegal frequency value
(Causa)
La frecuencia de movimiento pendular no es vlida
(Solucin) Introduzca un valor de frecuencia que est dentro del rango vlido.
WEAV-008 PAUSE.G Weave illegal amplitude value
(Causa)
La amplitud no es vlida.
(Solucin) Introduzca un valor de amplitud que est dentro del rango vlido.
-1515-
APENDICE D
B-82284ES-3/01
WEAV-009 PAUSE.G Weave illegal dwell value
(Causa)
El valor del temporizador de intervalos no es vlido.
(Solucin) Introduzca un valor de temporizador de intervalos que est dentro del rango vlido.
WEAV-010 WARN Weave too many pre-exec WS
(Causa)
Se han ejecutado previamente ms de un comando de movimiento pendular.
(Solucin) No es necesario tomar ninguna medida.
WEAV-011 WARN Unsupported function code
(Causa)
Es un error interno de software.
(Solucin) Desconecte y vuelva a conectar.
WEAV-012 WARN Multi-group stop dwell invalid
(Causa)
No se puede usar ningn paro de intervalo en un programa con mltiples grupos
indicados.
(Solucin) Seleccione "move" para el paro de intervalo en la pantalla Weave Setup.
WEAV-013 PAUSE.G Incorrect weaving vectors
(Causa)
El vector de movimiento pendular es incorrecto.
No se puede calcular el vector de movimiento pendular.
(Solucin) Para calcular el vector de movimiento pendular correcto, configure un sistema de
coordenadas del usuario o cambie el vector de la trayectoria de soldadura.
WEAV-014 STOP.G Wrist Joint Limit
(Causa)
Los ejes de mueca alcanzan su lmite.
(Solucin) Cambiar la configuracin de la mueca para permitir ejes de mueca fuera de sus
lmites.
WEAV-015 STOP.G Wrist axes 5 closes to zero
(Causa)
La unin 5 est demasiado cerca del cero.
(Solucin) Cambiar la configuracin de la mueca para evitar singularidad.
WEAV-016 STOP.G Unknown wrist configuration error
(Causa)
Error de configuracin de mueca desconocida.
(Solucin) Cambiar la configuracin de la mueca.
WEAV -017 STOP.G run_ang exceeds tol_ang
(Causa)
Los ngulos de la direccin de tejimiento fuera de su mejor direccin es mayor que la
permitida tol_ang.
(Solucin) Cambiar el ngulo del soplete o aumentar el valor del tol_ang.
WEAV -018 STOP.G Invalid UTool
(Causa)
La actual "utool" tiene valor nulo.
(Solucin) Usar una "utool" vlida.
-1516-
APENDICE D
B-82284ES-3/01
WEAV -019 STOP.G Total of phase is 0
(Causa)
El total de la fase es 0.
(Solucin) Configurar el valor del total de la fase.
WEAV -020 STOP.G Component of all vectors are 0
(Causa)
El componente de todos los vectores de la unidad es 0.
(Solucin) Configurar el valor del componente.
WEAV -021 STOP.G Weave illegal elevation value
(Causa)
Valor de elevacin invlido.
(Solucin) Cambiar la elevacin para estar dentro de los lmites.
WEAV -022 STOP.G Weave illegal azimuth value
(Causa)
Valor de acimut invlido.
(Solucin) Cambiar el acimut para estar dentro de los lmites.
WEAV -023 STOP.G Weave illegal center rise value
(Causa)
Valor de "Center rise" invlido.
(Solucin) Cambiar el "center rise" para estar dentro de los lmites.
WEAV -024 STOP.G Weave illegal radius value
(Causa)
Valor del radio invlido.
(Solucin) Cambiar el radio para estar dentro de los lmites.
-1517-
APENDICE D
B-82284ES-3/01
D.2.30 Alarma de Memorizacin de la Trayectoria Raz (ID = 43)
RPM-001 WARN n_buffers invalid
(Causa)
El valor para $RPM_CONFIG.$N_BUFFERS es invlido.
(Solucin) Configurar $RPM_CONFIG.$N_BUFFERS en el rango 1-100.
RPM-002 WARN record_size invalid
(Causa)
El valor para $RPM_CONFIG.$DATA_SIZE es invlido.
(Solucin) Configurar $RPM_CONFIG.$DATA_SIZE en el rango 4-32.
RPM-005 SYSTEM memory allocation failed
(Causa)
No hay suficiennte memoria cmos para este segmento "rpm".
(Solucin) Aumentar la memoria cmos borrando el TPE que no se use. O aumentar el valor de la
inclinacin para que el "rpm" no necesite tanto espacio "cmos".
RPM-009 STOP.G segment not in buffer
(Causa)
Intento de playback de un segmento que no ha sido grabado.
(Solucin) Comprobar que RECORD est activo para este segmento y se usa el nmero de buffer
correcto.
RPM-013 STOP.G invalid buffer no
(Causa)
El nmero de buffer especificado es invlido.
(Solucin) Use un nmero de buffer en el rango 1-$RPM_CONFIG.$N_BUFFERS.
RPM-014 STOP.G record not stored
(Causa)
Este segmento no ha sido grabado.
(Solucin) Volver a grabar la trayectoria entera.
RPM-020 WARN read record not stored
(Causa)
No hay datos "rpm" almacenados en este segmento.
(Solucin) Comprobar el nmero de posicin o volver a grabar.
RPM-026 ABORT.G Pitch value too small.
(Causa)
El valor de inclinacin ($RPM_PG.$PITCH) es demasiado pequeo.
(Solucin) El valor de la inclinacin de tiempo ($RPM_PG.$PITCH) tiene que igualar o ser mayor
de 100.
RPM-027 STOP.G Illegal arc instruction.
(Causa)
Se usa el inicio de arco autnomo.
El inicio de arco autnomo no puede ser usado durante el RPM.
(Solucin) Use el movimiento adjunto a la instruccin de inicio de arco.
RPM-028 STOP.G Segment too short
(Causa)
El segmento para RPM es de movimiento de longitud cero o demasiado corto.
(Solucin) El movimiento RPM de longitud cero no es permitido.
RPM-039 STOP.G Incompatible RPM data:nonCD/CD
(Causa)
Los datos RPM tienen movimientos coordinados pero el TPE no.
O los datos RPM tienen movimientos no coordinados pero TPE s.
(Solucin) Use el mismo tipo de movimiento coordinado (CD o no) para ambos programas TAST
y RPM.
-1518-
APENDICE D
B-82284ES-3/01
D.2.31 Touch Sensor Alarm (ID = 60)
THSR-001 PAUSE.G Illegal instruction sequence
(Causa)
Intentar ejecutar una instruccin de deteccin de contacto fuera de la secuencia.
Por ejemplo, una instruccin de inicio de bsqueda sigue una instruccin de inicio de
Offset sin fin de Offset entre medias.
(Solucin) Por favor, comprobar la secuencia de intruccin de deteccin de contacto, o abortar el
programa actual y comenzar de nuevo.
THSR-002 PAUSE.G Illegal schedule number
(Causa)
El nmero de programacin de entrada es superior al rango permitido.
(Solucin) Elegir un nmero de programacin del 1 al 32.
THSR-003 PAUSE.G Illegal work frame number
(Causa)
El nmero de trama de entrada es superior al rango permitido.
(Solucin) Elegir un nmero de trama del 1 al 32.
THSR-004 PAUSE.G Illegal output PR number
(Causa)
El nmero de registro de la posicin de entrada es superior al rango permitido.
(Solucin) Elegir un nmero de registro de posicin apropiado.
THSR-005 PAUSE.G Illegal search PR number
(Causa)
El registro de posicin especificado para el resultado de la bsqueda es superior al rango
permitido.
(Solucin) Elegir un nmero de registro de posicin apropiado.
THSR-006 PAUSE.G Search without search start
(Causa)
Buscar una instruccin sin inicio de bsqueda.
(Solucin) Aadir una instruccin de inicio de bsqueda.
THSR-007 PAUSE.G Invalid touch I/O assignment
(Causa)
La asignacin "touch I/O" es incorrecta.
(Solucin) Se ruega comprobar la pantalla de configuracin "touch I/O" en el men de
configuracin.
THSR-008 PAUSE.G Arc enable detected
(Causa)
La circuitrera de la soldadura del arco est activada.
(Solucin) Desactive la circuitrera de la soldadura por arco antes de activar la deteccin de
contacto.
-1519-
APENDICE D
B-82284ES-3/01
THSR-009 WARN Teach pendant not enabled
(Causa)
La consola de programacin est desactivada.
(Solucin) Active la consola de programacin.
THSR-010 PAUSE.G Illegal motion state
(Causa)
El sistema de movimiento se encuentra en estado de error.
(Solucin) Pulse el botn de reinicio para reiniciar el controlador.
THSR-011 PAUSE.G Illegal sensor port number
(Causa)
El puerto de bsqueda especificado es superior al rango permitido.
(Solucin) Cambiar el tipo de puerto y el nmero de puerto en el sub-men del "touch I/O".
THSR-012 PAUSE.G Illegal search pattern
(Causa)
No se reconoce la pauta de bsqueda indicada.
(Solucin) Cambiar la pauta de bsqueda en la programacin del detector de contacto.
THSR-013 PAUSE.G Illegal number of search
(Causa)
El nmero de bsquedas no coincide con la pauta de bsqueda.
(Solucin) Cambiar la pauta de bsqueda o aadir/borrar instrucciones de bsqueda.
THSR-014 WARN Illegal search distance
(Causa)
Se trata de un mensaje de advertencia.
La distancia de bsqueda especificada es superior al rango permitido.
Se usa una velocidad por defcto.
(Solucin) Cambiar la velocidad de bsqueda en la programacin del detector de contacto.
THSR-015 WARN Illegal search speed
(Causa)
La velocidad de bsqueda especificada es superior al rango permitido.
(Solucin) Cambiar la velocidad de bsqueda en la programacin del detector de contacto.
THSR-016 WARN Illegal return speed
(Causa)
La velocidad de retorno especificada es superior al rango permitido.
(Solucin) Cambiar la velocidad de retorno en la programacin del detector de contacto.
-1520-
APENDICE D
B-82284ES-3/01
THSR-017 PAUSE.G No contact with part
(Causa)
La bsqueda no produce contacto con la pieza.
(Solucin) Use el retoque para programar una nueva posicin de inicio de bsqueda.
THSR-018 PAUSE.G Too many searches
(Causa)
Demasiadas bsquedas para la pauta de bsqueda especificada.
(Solucin) Elimine las instrucciones de bsqueda que no necesite.
THSR-019 PAUSE.G Mixing search types
(Causa)
El tipo de bsqueda NONE no puede ser mezclado con la bsqueda direccional dentro
de una pauta de bsqueda.
(Solucin) Asegrese de que todos los cables hacia el puerto serie estn adecuadamente
conectados, y de que el controlador de soldadura est encendido. El cdigo de error que
es agregado a este mensaje de error es el estado de la operacin probada de leer/escribir.
THSR-020 PAUSE.G Geometic computing error
(Causa)
Las bsquedas no generan un "offset" satisfactorio.
(Solucin) Comprobar la pauta de bsqueda y buscar instrucciones en la pauta.
THSR-021 PAUSE.G Points are too close
(Causa)
Las posiciones programadas estn demasiado prximas entre ellas.
(Solucin)Programar posiciones nuevas de inicio de bsqueda
THSR-022 PAUSE.G Part is not mastered
(Causa)
Buscar instrucciones sin datos "master".
(Solucin) Masterizando la primera parte.
THSR-023 WARN No search start
(Causa)
La instruccin de bsqueda no tiene un inicio de bsqueda.
(Solucin) Aadir un inicio de bsqueda antes de empezar con la bsqueda.
THSR-023 WARN No search start
(Causa)
La instruccin de Fin de Offset no tiene una instruccin de inicio de offset asociada.
(Solucin) Aadir una instruccin de inicio de offset.
-1521-
APENDICE D
B-82284ES-3/01
THSR-025 PAUSE.G Nested search start
(Causa)
La instruccin de inicio de bsqueda se encuentra dentro de otra instruccin de inicio
de bsqueda.
(Solucin) Aadir una instruccin de fin de bsqueda en el lugar apropriado o borrar el inicio de
bsqueda extra.
THSR-026 PAUSE.G Nested offset start
(Causa)
La instruccin de inicio de desplazamiento se encuentra dentro de otra instruccin de
inicio de desplazamiento.
(Solucin) Aadir una instruccin de fin de desplazamiento en el lugar apropriado o borrar el inicio
de desplazamiento extra.
THSR-027 STOP.G Preplan is not allowed
(Causa)
No hay movimiento previsto dentro del inicio de bsqueda.
(Solucin) Es normal que se emita un error de stop cuando la previsin est activada en el inicio de
bsuqeda.
THSR-028 PAUSE.G Group number mismatch
(Causa)
El movimiento de bsqueda debe encontrarse en el movimiento de grupo 1.
(Solucin) Use el grupo 1 para grabar los movimientos de bsqueda.
THSR-029 WARN No contact warning
(Causa)
La bsqueda no produce contacto con la pieza.
(Solucin) Use el retoque para programar una nueva posicin de inicio de bsqueda.
THSR-030 STOP.G Contact before search
(Causa)
El cable hace contacto con la pieza antes de que se inicie el movimiento de bsqueda.
(Solucin) Compruebe la parte y el cable o programe una nueva posicin de inicio de bsqueda.
THSR-031 WARN Illegal register number
(Causa)
El nmero de registro introducido es ilegal, y est reajustado por el software al mximo
nmero disponible.
(Solucin) Compruebe los datos introducidos.
THSR-032 PAUSE.G Position type mismatch
(Causa)
El tipo de posicin en el registro de posicin debera ser el tipo XYZWPR.
La representacin articular no est permitida.
(Solucin) Cambie la representacin de posicin al tipo XYZWPR.
-1522-
APENDICE D
B-82284ES-3/01
THSR-033 PAUSE.G Not enough points
(Causa)
El sistema por deteccin de contacto no dispone de suficientes puntos para computar la
geometra.
(Solucin) Grabe ms puntos.
THSR-034 STOP.G No bwd on search motion
(Causa)
La deteccin de contacto no permite la ejecucin al revs en el movimiento de
bsqueda.
(Solucin) No active Shift-BWD en la bsqueda.
THSR-035 STOP.G Error Allocating Data
(Causa)
No hay suficiente memoria.
(Solucin) Borrar variables y programas cargados que sean innecesarios.
THSR-036 STOP.G Coord pair is not available
(Causa)
El movimiento Coord no est instalado o calibrado.
(Solucin) Instalar el movimiento coord y calibrar el par cd.
THSR-037 STOP.G Illegal motion ref. grp.
(Causa)
La bsqueda simple debe tener schd_ref_grp = 1.
(Solucin) Modificar el grupo de referencia.
THSR-038 STOP.G Not matches to leader grp.
(Causa)
El entorno de contacto o programa del grupo de referencia no concuerda con el grupo
gua.
(Solucin) Modificar el grupo de referencia.
THSR-039 STOP.G Reference grp mismatch
(Causa)
Ninguna bsqueda simple requiere a la trama del grupo de referencia igual al programa
del grupo de referencia.
(Solucin) Modificar el grupo de referencia.
THSR-040 STOP.G Search Distance Short
(Causa)
La distancia de bsqueda en programas de contacto es demasiado corta.
(Solucin) Incrementar la distancia de bsqueda en el programa de contacto.
THSR-041 PAUSE.G Invalid touch group mask
(Causa)
Mscara de grupo de deteccin de contacto invlida en los datos de programa, o Rutina
de bsqueda no realizada anterior al Touch Offset.
(Solucin) Comprobar el programa de contacto, la Mscara de Grupo del Robot junto con el Grupo
de Referencia debera ser igual a la mscara de grupo en el encabezamiento del
programa T.P.
Adems, la rutina de bsqueda debera ser realizada directamente anterior al Touch
Offset.
-1523-
APENDICE D
B-82284ES-3/01
THSR-042 STOP.G Maint Program not allowed
(Causa)
El programa de mantenimiento no presta apoyo a la percepcin de contacto Touch
Sensing.
(Solucin) Anular el programa de mantenimiento en el men de recuperacin de Errores, o usar el
programa de reanudacin para recuperacin de errores.
THSR-043 WARN Calibration File not found
(Causa)
No se ha encontrado el archivo de calibrado de la entrada anloga de Touch sensing.
(Solucin) Crear un archivo de calibrado de entrada anloga frs:th_calib.dt.
THSR-044 WARN Invalid TH Calibration Data
(Causa)
El archivo de calibrado de la entrada anloga tiene formato de datos invlido.
(Solucin) Corregir el formato de datos en el archivo de calibrado de entrada anloga, incluyendo
los datos de configuracin y tabla "lookup".
THSR-045 STOP.G Analog Input Not Calibrate
(Causa)
El soporte de entrada anloga no ha sido calibrado.
(Solucin) Crear un archivo de calibrado de entrada anloga con formato de datos correcto.
THSR-046 STOP.G Invalid Analog Input Data
(Causa)
Datos de entrada anlogos no vlidos.
(Solucin) Los datos de entrada anlogos deben estar dentro del rango vlido.
-1524-
APENDICE D
B-82284ES-3/01
D.2.32 Data Monitor Alarm (ID = 40)
DMER-010 STOP.L (%s^4, %d^5)Uninitialized data
(Causa)
Los datos internos no existen en la ejecucin del Sample Start/End.
(Solucin) Comprobar el tamao disponible de la memoria permanente.
Ejecute un arranque controlado.
DMER -011 STOP.L (%s^4, %d^5)Already sampling
(Causa)
Ha sido ya ejecutada una instruccin de Sample Start.
(Solucin) Retirar la instruccin de Sample Start duplicada.
DMER -012 STOP.L (%s^4, %d^5)Other task sampling
(Causa)
Ya se ha iniciado el muestreo mediante otra tarea.
(Solucin) Muestreo con una tarea en una vez cuando se usan tareas mltiples.
DMER -013 STOP.L Invalid item number
(Causa)
El programa en ejecucin del Seguidor de datos especifica un nmero de elemento
invlido.
(Solucin) Editar el programa del seguidor de datos especificado en el programa.
Corregir todos los elementos monitorizados que no tengan nmeros de elementos del
rango 1 a $DMONCFG.$NUM_DM_ITMS.
DMER -014 STOP.L Unsupported item type
(Causa)
El tipo de elemento no lleva soporte para muestreo.
(Solucin) Cambie el tipo de elemento.
DMER -015 STOP.L Invalid schedule number
(Causa)
El programa de muestreo hace referencia a un nmero de elemento invlido.
(Solucin) Cambiar el nmero de elemento en el programa de muestreo.
DMER -016 STOP.L Invalid register type
(Causa)
El registro n referido por la instruccin Sample Start[R[n]] no es un tipo vlido.
(Solucin) Cambiar el tipo de registro en la pantalla de datos DATA.
DMER -017 WARN Warn Limit item (%d)
(Causa)
Las funciones de seguidor de datos es comprobar este elemento.
El elemento es pasado el lmite de aviso.
(Solucin) Examinar el sistema por si hubiera problemas.
DMER -018 STOP.L Pause Limit item (%d)
(Causa)
Las funciones de seguidor de datos es comprobar este elemento.
El elemento es pasado el lmite de pausa.
(Solucin) Examinar el sistema por si hubiera problemas.
DMER -019 STOP.L Data cannot be saved
(Causa)
El seguidor de datos no puede grabar datos al dispositivo especificado.
(Solucin) Comprobar si el dispositivo en la lista del programa est disponible.
-1525-
APENDICE D
B-82284ES-3/01
DMER -020 STOP.L Record buffer limit
(Causa)
Se ha llenado el buffer del seguidor de datos.
(Solucin) Disminuir la frecuencia de grabacin o incrementar el tamao del buffer y cold start.
DMER-021 STOP.L Not enough device memory free
(Causa)
El dispositivo especificado en el programa del seguidor de datos no tiene suficiente
espacio de archivo disponible.
(Solucin) Use una tarjeta de memoria o disquete con ms memoria disponible o especificar un
tamao de archivo ms pequeo file_size en el programa de seguidor de datos.
DMER -022 STOP.L Invalid file size
(Causa)
El tamao de archivo especificado en el programa del seguidor de datos es invlido.
De este error se informa si el tamao del archivo especificado es negativo o mayor que
el medio que est usando.
(Solucin 1) Asegurarse de que el tamao de archivo especificado en el programa del seguidor de
datos no es negativo y es menor que el tamao del medio que se est usando.
(Solucin 2) Si se especifica el file_size en cero, el seguidor de datos slo comprueba que hay al
menos un bloque libre disponible.
DMER -023 WARN File is incomplete
(Causa)
El archivo de datos creado en el dispositivo especificado no contiene una grabacin
completa de la sesin de muestreo del Sample Start al Sample End.
Esto se debe probablemente a la insuficiente memoria en el dispositivo especificado.
(Solucin 1) Incrementar la cantidad de memoria disponible en el dispositivo.
Borrar archivos de datos antiguos si es necesario.
(Solucin 2) Reducir el ndice de grabacin especificado en el programa.
(Solucin 3) Reducir el tiempo entre Sample Start y Sample End.
DMER -024 WARN Data is not saved
(Causa)
El seguidor de datos no est grabando datos al dispositivo especificado.
(Solucin) Verificar si el dispositivo en la lista del programa est disponible.
DMER -025 STOP.L Data item type mismatch
(Causa)
El tipo especificado para un elemento de seguimiento de datos no concuerda con el tipo
de la variable que est siendo monitorizada.
(Solucin) Corregir el tipo de elemento en la pantalla del seguidor de datos.
DMER -026 WARN Not enough memory for pipe
(Causa)
No hay suficiente memoria para asignar el tamao del tubo requerido.
(Solucin) Seleccionar un tamao ms pequeo para el tubo, o seleccionar un dispositivo diferente.
DMER -027 WARN Failed to write to pipe
(Causa)
El seguidor de datos no era capaz de escribir datos al tubo.
(Solucin) Reasignar el tubo cambiando el tamao del tubo o dispositivo usando variables de
sistema $DMONCFG.$PIP_SIZE y $DMONCFG.$PIP_DEV_TYP.
-1526-
APENDICE D
B-82284ES-3/01
DMER -031 WARN DAQ task not available
(Causa)
La tarea de Adquisicin de datos no est activa en el sistema.
(Solucin) Asegrese de que se ha cargado la opcin de Adquisicin de datos.
Pngase en contacto con FANUC Robotics.
DMER-032 WARN DAQ system failed
(Causa)
El sistema de Adquisicin de datos ha encontrado un fallo crtico.
(Solucin) Pngase en contacto con FANUC Robotics.
DMER -033 WARN DAQ initialization failed
(Causa)
El sistema de Adquisicin de datos ha fallado para un inicio correcto.
(Solucin) Se ruega llamar al servicio de FANUC.
DMER -034 WARN Pipe tag invalid
(Causa)
La etiqueta usada para hacer referencia a un tubo de Adquisicin de datos es invlida.
(Solucin) Comprobar el valor de la etiqueta para asegurarse de que entra en los lmites adecuados.
DMER -035 WARN Pipe already registered
(Causa)
El tubo de Adquisicin de datos que est intentando usar ya ha sido registrado.
(Solucin) Desregistre el tubo e intente la operacin de nuevo.
DMER -036 WARN Pipe not registered
(Causa)
El tubo de Adquisicin de datos que est intentando usar no ha sido registrado.
(Solucin) Los tubos DAQ deben ser registrados por una tarea de control antes de que se puedan
usar.
DMER -037 WARN Pipe already active
(Causa)
Est intentando activar un tubo de Adquisicin de datos que ya est activado.
(Solucin) Desactivar primero el tubo.
DMER -038 WARN Cannot allocate global FD
(Causa)
No hay archivos globales disponibles para ser usados por el sistema de Adquisicin de
datos.
(Solucin) Cerrar un archivo global antes de re-intentar esta operacin.
DMER -039 WARN Pipe %d could not be activated
(Causa)
El tubo que ha intentado usar no pudo ser activado por alguna razn.
(Solucin) Comprobar todos los parmetros de la llamada de activacin.
DMER -040 WARN Pipe not active
(Causa)
El tubo al que intenta acceder no ha sido activado.
(Solucin) Activar el tubo antes de intentar esta operacin.
DMER -041 WARN DAQ ran out of memory
(Causa)
El sistema de Adquisicin de datos ha agotado la memoria.
(Solucin) Borre programas para liberar la unidad de control de la memoria, entonces re-intente la
operacin.
-1527-
APENDICE D
B-82284ES-3/01
DMER -042 WARN Invalid DAQ output device
(Causa)
Ha especificado un dispositivo de salida invlido.
(Solucin) Comprobar el parmetro del dispositivo que haya especificado.
DMER-043 WARN DAQ output mode mismatch
(Causa)
La operacin de salida que est intentando no puede ser realizada usando el dispositivo
de salida actual.
(Solucin) Comprobar los parmetros de su operacin de salida.
DMER -044 WARN DAQ output file not defined
(Causa)
No ha sido definido ningn archivo de salida para la operacin requerida.
(Solucin) Definir un archivo de sallida para el tubo, entonces reintente la operacin.
DMER -045 WARN DAQ monitor not found
(Causa)
El monitor de la adquisicin de datos especificado no pudo ser ubicado.
(Solucin) Corregir su parmetro de monitor para la operacin requerida.
DMER -046 WARN DAQ monitor already exist
(Causa)
Est intentando aadir un monitor de Adquisicin de datos que ya existe.
(Solucin) Use el monitor existente, o retire el monitor existente antes de proceder.
DMER -047 WARN No client tags available
(Causa)
No estn disponibles para usar las etiquetas de dispositivos de cliente.
(Solucin) Desasignar una o ms etiquetas de cliente antes de proceder.
SPOT-035 PAUSE Invalid equipment (%s defined)
(Causa)
Se ha especificado un nmero de equipo invlido.
(Solucin) El nmero de equippo actual para el que el sistema es configurado se visualiza en el
mensaje de error. Usar slo el valor a partir de uno e incluyendo el nmero expuesto en
la lnea de error. Si necesita incrementar el nmero del equipo, entonces realice un inicio
controlado, y and teclee el nmero nuevo del equipo en el men Spot Config.
DMER -048 WARN Client tag not used
(Causa)
La etiqueta del cliente especificada no est siendo usada.
(Solucin) Comprobar el parmetro de la etiqueta de cliente para asegurar que la etiqueta correcta
es especificada.
DMER -049 WARN DAQ data size mismatch
(Causa)
Se ha detectado una discordancia entre el tamao de los datos especificados y el tamao
de los datos para el tubo.
(Solucin) Compruebe el tamao de los datos especificados.
DMER -050 WARN DAQ: Parmetro malo
(Causa)
Un parmetro malo ha sido detectado en la llamada rutinaria.
(Solucin) Comprobar todos los valores de parmetros antes de hacer la llamada rutinaria.
-1528-
APENDICE D
B-82284ES-3/01
DMER -051 WARN DAQ: monitores an activos
(Causa)
Los monitores estn an activos cuando se intenta la operacin actual.
(Solucin) Retirar los monitores del tubo antes de intentar esta operacin.
DMER -052 WARN DAQ: Parmetro malo tipo mem
(Causa)
El parmetro del tipo de memoria es invlido.
(Solucin) Especificar un tipo de memoria vlido.
DMER -053 WARN DAQ: Parmetro malo tamao del tubo
(Causa)
El parmetro del tamao del tubo es invlido.
(Solucin) Especificar un tamao de tubo vlido.
DMER -054 WARN DAQ: Parmetro malo nombre del prog
(Causa) El parmetro del nombre del programa no es vlido.
(Solucin) Especifique un nombre de programa vlido.
DMER -055 WARN DAQ: Parmetro malo nombre var
(Causa) El parmetro del nombre de la variable no es vlido.
(Solucin) Especifique un nombre de variable vlido.
DMER -056 WARN DAQ: Parmetro malo modo de salida
(Causa) El parmetro del modo de salida no es vlido.
(Solucin) Especifique un modo de salida vlido.
DMER -057 WARN DAQ task ID mismatch
(Causa)
El ID de tarea especificada no concuerda con el ID de tarea usado para registrar el tubo.t.
(Solucin) Desregistrar el tubo slo de la tarea en la que el tubo fue registrado.
DMER -058 WARN Invalid DAQ pipe name
(Causa)
El nombre del tubo especificado no es vlido.
(Solucin) Comprobar el nombre del tubo para una cadena nula o caracteres invlidos.
DMER -100 STOP.L Buffer index error(Item:%d)
(Causa)
$DMONBUF especificado mediante $DMONITEM.$BFFV_INDEX no existe.
(Solucin) Ajustar el ndice correctamente.
DMER -101 STOP.L [%s]%s doesn't exist
(Causa)
Especifica que no existe la variable KAREL.
(Solucin) 1. Confirmar si el nombre de la variable es correcto.
2. Confirmar si el programa especificado est cargado.
DMER -102 STOP.L [%s]%s isn't array
(Causa)
La variabel Karel para salida de datos debe ser matriz (array).
(Solucin) Use ARRAY de la variable.
-1529-
APENDICE D
B-82284ES-3/01
DMER -103 STOP.L [%s]%s is array
(Causa)
La variable Karel para almacenar el nmero de grabacin no debe ser matriz.
(Solucin) Use la variable que no es matriz.
DMER -104 STOP.L [%s]%s is full
(Causa)
La variabel Karel para salida de datos ha sido agotada.
(Solucin) Cambiar la configuracin para la matriz para contener todas la grabaciones.
O incrementar el nmero de elementos de la matriz.
DMER-105 WARN [%s]%s is full
(Causa)
La variabel Karel para salida de datos ha sido agotada.
(Solucin) Cambiar la configuracin para la matriz para contener todas la grabaciones.
O incrementar el nmero de elementos de la matriz.
DMER -106 STOP.L [%s]%s is multiple dimension array
(Causa)
La variabel Karel para salida de datos debe ser matriz de dimensin sencilla
(Solucin) Use matriz de dimensin sencilla.
DMER -107 STOP.L Invalid axis number
(Causa)
El elemento de seguimiento de datos que va a ser muestreado especifica un nmero
invlido de ejes.
(Solucin) 1. Editar el elemento del seguidor de datos que va a ser muestreado.
2. Corregir el nmero de ejes y nmero de grupo para especificar el eje actual.
-1530-
APENDICE D
B-82284ES-3/01
D.2.33 Alarma del TorchMate (ID = 119)
TMAT - 000 WARN Offset is out of range
(Causa)
TorchMate ha encontrado que el desplazamiento del soplete desde el TCP original est
ms all de los lmites del desplazamiento en la pantalla SETUP.
(Solucin) Determinar si el soplete necesita ser reemplazado en este momento.
Reemplazarlo si fuera necesario, o incrementar los lmites del desplazamiento en la
pantalla SETUP del TorchMate.
TMAT - 001 WARN Sensor is ON before search
(Causa)
El cable est en contacto con la placa del soplete o est conectado a tierra antes de
ejecutar el movimiento del soplete;
1. La separacin del cable es demasiado larga.
2. La posicin de inicio para el movimiento del soplete est demasiado cerca de la placa
del soplete.
3. El circuito del soplete del equipo de soldadura o circuito de soplete externo provisto
de usuario ha sido reducido.
(Solucin) 1. Hacer ms corta la separacin del cable antes de la ejecucin del TorchMate mediante
la recogida del cable o cortando el cable.
2. Incrementar el valor de la posicin de bsqueda inicial en el men SETUP del
TorchMate.
3. Contactar con el fabricante para un uso correcto de su circuito de deteccin de
contacto (es decir, la soldadora puede necesitar un diodo de bloqueo) e inspeccionar
cualquier hardware de circuito de contacto para una instalacin correcta o para
componentes daados.
TMAT - 002 WARN Sensor failed during search
(Causa)
1. El circuito de sensor TorchMate indica que el cable est en contacto con la placa de
contacto antes del movimiento de bsqueda (demasiada separacin-la distancia del
inicio de la bsqueda es demasiado pequea.)
2. Hay un corto elctrico en el circuito de contacto (por ejemplo, algunos circuitos
requieren un diodo de bloqueo en la fuente de alimentacin.)
(Solucin) 1. Disminuir la separacin, incrementar la distancia de inicio de bsqueda, o reemplazar
el soplete torcido.
2. Contactar con el suministrador de su equipo de soldadura contemplando los
requerimientos del circuito de contacto y cableado auxiliar (si fuera necesario).
TMAT - 003 WARN Z offset is not mastered
(Causa)
Este error indica que la compensacin de Z fue desactivada durante la masterizacin y
activada durante el ajuste del TorchMate. El TorchMate (ajuste del soplete) no se puede
compensar para el offset de Z si no es masterizada.
(Solucin) Desactivar la compensacin de Z en la pantalla SETUP del TorchMate.
TMAT - 004 WARN Program paused while mastering
(Causa)
La masterizacin fue detenida al liberar la tecla SHIFT.
(Solucin) Seleccionar la tecla programable MASTER para ejecutar la masterizacin.
Pulsar y mantener pulsada la tecla SHIFT hasta que la masterizacin se complete.
-1531-
APENDICE D
B-82284ES-3/01
TMAT - 005 WARN WO[1] is not available for output
(Causa)
La seal de salida del TorchMate ha sido asignada a la salida del Inicio de soldadura.
(Solucin) Reasignar la seal de salida del TorchMate al circuito de contacto del soldador, o a un
circuito externo designado a proporcionar la entrada de contacto cuando el cable toque
la placa de contacto.
TMAT - 006 WARN Override must be 100 %
(Causa)
La velocidad debe ser 100% durante la masterizacin y el ajuste del TorchMate.
(Solucin) Configurar la velocidad en 100%, y ejecutar la masterizacin o el ajuste del TorchMate
de nuevo.
TMAT - 007 WARN Dry run is not allowed
(Causa)
El TorchMate no funciona si el DRY RUN est encendido.
(Solucin) Visualizar el men del Test Cycle (ciclo de prueba), y apagar el DRY RUN.
TMAT - 008 WARN TorchMate is not mastered
(Causa)
1. El ajuste del TorchMate se ha intentado antes de la masterizacin.
2. El ajuste del TorchMate ha activado el offset de Z , pero la masterizacin se hizo con
el offset Z desactivado.
3. El ajuste del TorchMate ha desactivado el offset de Z , pero la masterizacin se hizo
con el offset Z activado.
(Solucin) Calibrar el TCP correctamente antes de usar el ajuste del TorchMate.
TMAT - 009 WARN No unassigned MACRO is available
(Causa)
La configuracin automtica de macros durante la instalacin no puede encontrar un
nmero de Macro sin usar. Ninguna entrada de la tabla del macro ser automticamente
asignada a TM_ADJST, TM_ADJ2, TM_ADJ3.
(Solucin) El programa de la consola de programacin del Macro ser cargada en el controlador.
Retirar un Macro sin usar de la tabla de Macros, y asignar TM_ADJST a ese nmero si
Ud. require la asignacin del macro del TorchMate en la tabla de Macros.
TMAT - 010 WARN Cannot run TorchMate in T1 Mode
(Causa)
Se ha producido un intento de funcionamiento del ajuste del TorchMate o masterizacin
en el modo T1 en un CE o controlador fiable de Control. Este error se aplica al
TorchMate y TorchMateII en R-J,
R-J2, y prontas comunicaciones de software en
controladores R-J3. Esta restriccin no se aplica en comunicaciones tardas de software
en R-J3, R-J3iB, y controladores R-J3iC.
(Solucin) En los controladores afectados, cambiar el modo de programacin al T2 y reejecutar la
masterizacin o el ajuste del TorchMate.
TMAT - 011 WARN Multiple equipment is not defined
(Causa)
La masterizacin del TorchMate o ajuste del TorchMate ha sido probado en un equipo
indefinido.
(Solucin) Instalar el equipo mltiple antes de la masterizacin o usando el ajuste del TorchMate
en este equipo.
TMAT - 012 WARN System Utool is not defined
(Causa)
El UTOOL que intenta ajustar o masterizar no est definido.
(Solucin) Instale su UTOOL usando el mtodo de 6 puntos.
-1532-
APENDICE D
B-82284ES-3/01
TMAT - 013 WARN %s is corrupt or does not exist
(Causa)
Los programas escondidos usados por el TorchMate se han vuelto corruptos.
Este es un suceso extremadamente raro.
(Solucin) Se ruega llamar al servicio de FANUC.
TMAT - 014 WARN Abort program using G:%s
(Causa)
Durante la masterizacin del TorchMate, la operacin MOVETO en la pantalla SETUP
del Torchmate, o ajuste del TorchMate fue probado en un grupo de movimiento
actualmente mantenido por un programa de PAUSED (detencin) o RUNNING
(ejecucin).
(Solucin) Abortar el programa PAUSED o RUNNING antes de ejecutar cualquiera de estas
funciones.
TMAT - 015 WARN G:%s does not support TorchMate
(Causa)
La masterizacin del TorchMate o ajuste del TorchMate fue usado en un grupo de
movimiento que no est asociado con el/los robot(s) en su sistema.
1. En la masterizacin, el grupo est determinado por el movimiento articular
seleccionado actualmente como aparece en la lnea de estado TP. Ud. ha seleccionado
el movimiento por eje del grupo de movimiento asociado a un posicionador, robot, o
dispositivo de ndice.
2. El ajuste del TorchMate tiene macros para cada grupo de robot instalado en su
sistema.
El programa ejecutndose en la actualidad incluye un macro de TorchMate y no incluye
ese grupo de movimiento del robot, o no contiene ningn grupo de movimiento del
robot.
(Solucin) 1. Seleccionar movimiento por eje para un grupo de movimiento que est asociado con
el /los robot(s) en su sistema.
2. Corregir el error de programacin.
TMAT - 016 WARN Run TorchMate before edit
(Causa)
Esto indica que el Monitor de Retoque del Torchmate ha sido encendido (el valor del
monitor de retoque es > 0.0 Hrs.), que el programa contiene un/unos grupo/s de
movimiento del robot, y que el ajuste del TorchMate no ha sido hecho dentro del tiempo
permitido.
(Solucin) Esto se borra pulsando la tecla ENTER. Se recomienda que ejecute el ajuste del
TorchMate para el/los grupo/s de movimiento en este programa antes de retocar
cualquier punto.
TMAT - 017 WARN Collision! Ejecutar TorchMate
(Causa)
Esto indica que el monitor de colisin del TorchMate ha sido encendido y que se ha
detectado que se ha producido una alarma de deteccin de colisin, una alarma de
exceso de disturbio, o una alarma de exceso de error movimiento/detencin.
(Solucin) Esta alarma causa la visualizacin de un mensaje. Pulsar la tecla ENTER para borrar el
mensaje. Inspeccionar el soplete por si hubiera algn dao de colisin. Poner en
funcionamiento el ajuste del TorchMate si fuera necesario.
-1533-
APENDICE D
B-82284ES-3/01
D.2.34 ArcTool Ramping Alarm (ID = 131)
RAMP-000 WARN Invalid destination speed.
(Causa)
Mximo de velocidad para la funcin de rampa es de 500mm/seg.
(Solucin) Cambiar esta velocidad de comando y velocidad de destino dentro del lmite de
velocidad.
RAMP -001 WARN Internal system error.
(Causa)
Error interno del sistema en la rampa.
(Solucin) Apagar para la recuperacin. Si el problema persiste, se ruega recargar el controlador.
RAMP -002 WARN Ramp is disabled.
(Causa)
La rampa est desactivada para movimiento hacia atrs.
(Solucin) Indicacin La "Rampa" no presta soporte al movimiento hacia atrs.
RAMP -003 WARN No support for deg/sec
(Causa)
La "Rampa" no presta soporte los grados/seg para esta unidad de velocidad.
(Solucin) Cambie la unidad de velocidad a mm/seg cm/min o puldada/min.
RAMP -004 WARN No time base speed unit.
(Causa)
La Rampa no presta soporte a la unidad de velocidad basada en el tiempo (mseg o seg).
(Solucin) Cambie la unidad de velocidad a mm/seg cm/min o puldada/min.
RAMP -005 WARN Ramp system loading error.
(Causa)
El software para la "rampa" est cargado incorrectamente.
(Solucin) Recargar el controlador.
RAMP -006 WARN Ramp disabled, Rotation motn
(Causa)
La Rampa est desactivada para el movimiento de rotacin dominada.
(Solucin) La posicin actual tiene un gran cambio de orientacin.
Se ruega re-grabar la posicin con menos cambio de orientacin para ejecutar el
movimiento de rampa de velocidad.
RAMP -007 WARN Ramp disabled. Movimiento corto.
(Causa)
La rampa est desactivada para el movimiento corto.
(Solucin) El movimiento actual se desplaza en distancia corta, insuficiente para aumentar la
velocidad del movimiento de rampa . Se ruega re-grabar la posicin con distancia ms
larga para ejecutar el movimiento de rampa de velocidad.
RAMP -008 WARN Max Speed is not supported.
(Causa)
La "Rampa" no presta soporte a la velocidad max para su unidad de velocidad.
(Solucin) Cambie la unidad de velocidad a mm/seg cm/min o puldada/min.
-1534-
You might also like
- R-J3iB Códigos de Error PDFDocument121 pagesR-J3iB Códigos de Error PDF1chicharoNo ratings yet
- Lista de Alarmas PDFDocument177 pagesLista de Alarmas PDFAlfonso Guerrero Rivera0% (1)
- B-83494SP - 02 LR Mate 200id ARC Mate 50id OPERATOR'S MANUAL PDFDocument106 pagesB-83494SP - 02 LR Mate 200id ARC Mate 50id OPERATOR'S MANUAL PDFJosé Angel NoguezNo ratings yet
- IO Devicenet FanucDocument40 pagesIO Devicenet FanucJorge Alberto Davis Lomelin100% (3)
- Arranque programa distancia UOP RSR PNSDocument3 pagesArranque programa distancia UOP RSR PNSJohan ZraghozNo ratings yet
- Potente software de soldadura ArcToolDocument31 pagesPotente software de soldadura ArcToolRaizo Malig100% (1)
- Crear, Modificar y Ejecutar Un ProgramaDocument72 pagesCrear, Modificar y Ejecutar Un ProgramajavierNo ratings yet
- Procedimiento para Masterizar Robot FanucDocument7 pagesProcedimiento para Masterizar Robot FanucJavier Flores100% (2)
- Fanuc MAROIST6406041ES - REV - B - SpotTool+Document2,066 pagesFanuc MAROIST6406041ES - REV - B - SpotTool+pacho_1100% (3)
- Manual Averías RJ3iC PDFDocument394 pagesManual Averías RJ3iC PDFBBS100% (6)
- Manual capacitación servo gun robot FanucDocument34 pagesManual capacitación servo gun robot FanucJesus Said Mercado VegaNo ratings yet
- CURSO PROGRAMACION FANUC VAGDocument13 pagesCURSO PROGRAMACION FANUC VAGkuajarlosNo ratings yet
- Fanuc Handlingtool Rev eDocument240 pagesFanuc Handlingtool Rev eIvan Paul Medellin Castro100% (1)
- SRVO códigos de alarma y solucionesDocument89 pagesSRVO códigos de alarma y solucionesJair ValenciaNo ratings yet
- Programación Básica de Un Robot FanucDocument11 pagesProgramación Básica de Un Robot FanucJean ZacaríasNo ratings yet
- Fanuc 20 R30 Ia 20 Ethernet IP20 Operator 20 ManualDocument122 pagesFanuc 20 R30 Ia 20 Ethernet IP20 Operator 20 ManualoscaragNo ratings yet
- Backup Fanuc InfoPLC Net ManualFANUCR-J3iBDocument16 pagesBackup Fanuc InfoPLC Net ManualFANUCR-J3iBJay Cee RizoNo ratings yet
- SRVO-006 Hand Broken Alarm Solution Under 40 CharactersDocument1 pageSRVO-006 Hand Broken Alarm Solution Under 40 CharactersEmmanuel Alejandro Medina EsparzaNo ratings yet
- B-82874SP - 08 ARC Mate 120ic M-20iA MECHANICAL UNIT Operator - PDFDocument212 pagesB-82874SP - 08 ARC Mate 120ic M-20iA MECHANICAL UNIT Operator - PDFSergio A. A.100% (1)
- Manual KarelDocument6 pagesManual Karelmemosurf37750% (1)
- Guía Del Estudiante Mtto Elect R30iA Esp - Rev 0.1.1Document199 pagesGuía Del Estudiante Mtto Elect R30iA Esp - Rev 0.1.1rx700060% (5)
- Training Guide 2009 IB - AshxDocument56 pagesTraining Guide 2009 IB - AshxlazcanoferNo ratings yet
- PaintTool Manual de Configuracion y Operaciones FANUC Robotics SYSTEM R-J3iBDocument1,512 pagesPaintTool Manual de Configuracion y Operaciones FANUC Robotics SYSTEM R-J3iBNahum Alamilla0% (1)
- Auto tuning robot pistola de pinturaDocument3 pagesAuto tuning robot pistola de pinturaFrancisco Soto100% (1)
- Robot Ops V6.11SpDocument85 pagesRobot Ops V6.11Sppedro100% (1)
- Mastering eléctrico del robot FANUC R-J3iBDocument23 pagesMastering eléctrico del robot FANUC R-J3iBPrudencio Lopez LopezNo ratings yet
- Curso de Programación A y B para J3iCDocument240 pagesCurso de Programación A y B para J3iCRogerio Silva100% (3)
- Reset Srvo038Document3 pagesReset Srvo038Anonymous t2LU6Mi100% (1)
- Temario Curso Fanuc Robotics (Basico)Document2 pagesTemario Curso Fanuc Robotics (Basico)Joseph Jimenez CarmonaNo ratings yet
- Reemplazo batería CPU encoders robotDocument1 pageReemplazo batería CPU encoders robotBobyNo ratings yet
- Ponencia Fanuc Arctool Jai2010Document31 pagesPonencia Fanuc Arctool Jai2010Jose ArandaNo ratings yet
- Manual de Usuario ROBOGUIDEDocument16 pagesManual de Usuario ROBOGUIDEMiguel SimbañaNo ratings yet
- Curso Programación TPE Nivel BDocument155 pagesCurso Programación TPE Nivel BissacnochebuenaNo ratings yet
- Procedimiento ProfiNET CP1604 R30iBPlus Device V2Document22 pagesProcedimiento ProfiNET CP1604 R30iBPlus Device V2Mikel Nuñez Ibañez100% (1)
- Procedimiento para La Configuración de Los Robots ETHERNET Fanuc (Verificado)Document22 pagesProcedimiento para La Configuración de Los Robots ETHERNET Fanuc (Verificado)arturo100% (1)
- Robótica Industrial FANUC - BásicoDocument20 pagesRobótica Industrial FANUC - BásicoErick ZagalNo ratings yet
- B-80687SP - 10 Safety Manual PDFDocument40 pagesB-80687SP - 10 Safety Manual PDFJosé Angel NoguezNo ratings yet
- Calibración y Masterizado FanucDocument3 pagesCalibración y Masterizado FanucMiliko LopezNo ratings yet
- Fanuc Basico PDFDocument218 pagesFanuc Basico PDFPrudencio Lopez LopezNo ratings yet
- Ethernet FANUC PDFDocument3 pagesEthernet FANUC PDF0906IIS050100% (7)
- Robot Fanuc SeatDocument98 pagesRobot Fanuc SeatAlberto Coronado Ocegueda100% (1)
- Robótica programación FANUCDocument186 pagesRobótica programación FANUCPepe CastilloNo ratings yet
- Manual de Formación EG - 02SPDocument83 pagesManual de Formación EG - 02SPkuka100% (1)
- Lenguaje - Karel Fanuc PDFDocument27 pagesLenguaje - Karel Fanuc PDFGiuseppe VarrialeNo ratings yet
- Mantenimiento Electrico Del Controlador R-30iADocument50 pagesMantenimiento Electrico Del Controlador R-30iAHector LaraNo ratings yet
- Manualejercicios PendantDocument10 pagesManualejercicios PendantRaúl AnelNo ratings yet
- Fanuc Lrmate 200id 4SDocument26 pagesFanuc Lrmate 200id 4SRaúl AnelNo ratings yet
- Curso Nivel 2Document34 pagesCurso Nivel 2Rodrigo Mendoza100% (2)
- R 30ib Controller Maintenance Manual Okpdf - PDF Versión 1Document410 pagesR 30ib Controller Maintenance Manual Okpdf - PDF Versión 1Rafa PhezNo ratings yet
- Unidad Mecánica 410ib 160 PDFDocument194 pagesUnidad Mecánica 410ib 160 PDFSergio A. A.0% (1)
- M410ic Mantenimiento Baterías EngrasadoDocument10 pagesM410ic Mantenimiento Baterías EngrasadocHeQuE EzequielNo ratings yet
- Robot FanucDocument52 pagesRobot FanucJesus Francisco Botello100% (2)
- Manual Intermedio MagnaDocument57 pagesManual Intermedio Magnaarturo100% (3)
- Curso programación robot FANUCDocument44 pagesCurso programación robot FANUCislu_21No ratings yet
- Maintenance Manual SpansihDocument136 pagesMaintenance Manual SpansihJuan Carlos Rojas LunaNo ratings yet
- Estandar de Ford Manual FanucDocument114 pagesEstandar de Ford Manual FanucOmar Yepiz100% (2)
- Curso Nivel 1Document32 pagesCurso Nivel 1Rodrigo Mendoza100% (2)
- Alarmas R 30ia 1Document259 pagesAlarmas R 30ia 1jose romeroNo ratings yet
- Crow 4Document16 pagesCrow 4Aleksandar ZivkovicNo ratings yet
- Curso de Mantenimiento Electrico R30iADocument37 pagesCurso de Mantenimiento Electrico R30iApedroNo ratings yet
- Manual Estapa de Potencia Estereo Pa200Document4 pagesManual Estapa de Potencia Estereo Pa200Juan Francisco Sanchez MassadiNo ratings yet
- T300 Racing Wheel Servo Base PS4 PC Online Content ESDocument10 pagesT300 Racing Wheel Servo Base PS4 PC Online Content ESJuan Francisco Sanchez MassadiNo ratings yet
- Documents 4016437165Document2 pagesDocuments 4016437165Juan Francisco Sanchez MassadiNo ratings yet
- BaseDocument1 pageBaseJuan Francisco Sanchez MassadiNo ratings yet
- Configuración de Comandos Cliffs of Dover Spitfire y BF PDFDocument3 pagesConfiguración de Comandos Cliffs of Dover Spitfire y BF PDFFélix GarridoNo ratings yet
- B-80687es 05Document38 pagesB-80687es 05Juan Francisco Sanchez MassadiNo ratings yet
- Manual Usuario (ES)Document6 pagesManual Usuario (ES)Juan Francisco Sanchez MassadiNo ratings yet
- Calculo Rueda Dentada Segun Norma DIN 8187Document2 pagesCalculo Rueda Dentada Segun Norma DIN 8187miguel santos 567% (3)
- Diseño y Cálculo de Elementos y Circuitos NeumáticosDocument50 pagesDiseño y Cálculo de Elementos y Circuitos NeumáticosSarah Perez83% (6)
- B-82584ES - 01 - LR Mate 200icDocument94 pagesB-82584ES - 01 - LR Mate 200icJuan Francisco Sanchez Massadi100% (1)
- Tesa 4600Document1 pageTesa 4600Juan Francisco Sanchez MassadiNo ratings yet
- Guia Aea Hasta 10kwDocument60 pagesGuia Aea Hasta 10kwgeotecnia359090% (58)
- Informe Practica Ley de OhmDocument14 pagesInforme Practica Ley de OhmSayumiTorresNo ratings yet
- Práctica de Laboratorio 02Document8 pagesPráctica de Laboratorio 02Sara JerezNo ratings yet
- OCW Capitulo IIIDocument40 pagesOCW Capitulo IIIGeorge AHNo ratings yet
- RelevadorDocument8 pagesRelevadorMitchel Alan Rodriguez RetaNo ratings yet
- Reporte de Practica # 7 Control de 3 MotoresDocument13 pagesReporte de Practica # 7 Control de 3 MotoresOscar Manuel Quiroz De La Vega0% (1)
- Sistemas Electricos 1Document20 pagesSistemas Electricos 1Sebastian ARTUNDUAGA MEÑACANo ratings yet
- 09-Capitulo IxDocument36 pages09-Capitulo IxAndrea sotoNo ratings yet
- ¿Qué Es El Sensor CKPDocument10 pages¿Qué Es El Sensor CKPAlexandra VidalNo ratings yet
- Secuencia 1 DGB - Ver - 2 - 2022Document10 pagesSecuencia 1 DGB - Ver - 2 - 2022Eduardo Linares MaldonadoNo ratings yet
- Mindray User Manual DP10Document125 pagesMindray User Manual DP10Germán Preisz60% (5)
- Introducción Al Sistema de CargaDocument5 pagesIntroducción Al Sistema de CargaMARSHALLLLL100% (1)
- Reglamentaciones Vigentes AEA 2019Document3 pagesReglamentaciones Vigentes AEA 2019Gabriel Zoratti100% (5)
- Transformadores tipo pad mounted trifásicos E-SDocument55 pagesTransformadores tipo pad mounted trifásicos E-SKarina Isabel Orellana SacasaNo ratings yet
- 1 - Libro Instalaciones Electricas PDFDocument281 pages1 - Libro Instalaciones Electricas PDFmario nigroNo ratings yet
- 15.16.17. Protocolo de Puesta A TierraDocument5 pages15.16.17. Protocolo de Puesta A TierraWinston RuizNo ratings yet
- Guía de Laboratorio N°3Document13 pagesGuía de Laboratorio N°3Giancarlos Pacherrez PerezNo ratings yet
- Analisis de Instrumentos de MedicionDocument6 pagesAnalisis de Instrumentos de MedicionAlejandra RLNo ratings yet
- Laboratoriode Electro Superficies EquipotencialesDocument9 pagesLaboratoriode Electro Superficies EquipotencialesDionisio HernandezNo ratings yet
- Redes SecundariasDocument13 pagesRedes Secundariaslonzho934No ratings yet
- Ecuación Dimensional para Tercer Grado de SecundariaDocument2 pagesEcuación Dimensional para Tercer Grado de SecundariaPablo Huamán ArenasNo ratings yet
- Transformador TrifasicoDocument13 pagesTransformador TrifasicoDiego Samaniego IdrovoNo ratings yet
- Laboratorio 6 Uni Fisica 3Document18 pagesLaboratorio 6 Uni Fisica 3Jennifer Morris100% (2)
- Cuál Es La Función Del Sistema de Precalentamiento Del MotorDocument5 pagesCuál Es La Función Del Sistema de Precalentamiento Del MotorsaboxNo ratings yet
- Análisis de Circuitos Eléctricos Reporte de PracticaDocument13 pagesAnálisis de Circuitos Eléctricos Reporte de PracticaRomarioo Reyes100% (1)
- La Ley de OhmDocument9 pagesLa Ley de OhmGabriela MercedesNo ratings yet
- 10 - Resonancia MagneticaDocument27 pages10 - Resonancia MagneticaAntonio Gonzales0% (1)
- Elenaresums CirurgiaDocument222 pagesElenaresums CirurgiaAya El KanfoudNo ratings yet
- PROCEDIMIENTO INTERVENCION MONTAJE Y MANTENCION DE UPS A13M429-I1-SIGMA2-00000-PROSE06-0000-008 (Rev 0)Document33 pagesPROCEDIMIENTO INTERVENCION MONTAJE Y MANTENCION DE UPS A13M429-I1-SIGMA2-00000-PROSE06-0000-008 (Rev 0)José Luis ContrerasNo ratings yet
- Protección de generadores: métodos y sistemasDocument40 pagesProtección de generadores: métodos y sistemasGiampier Elias Diaz100% (1)