You might also like
- Práctica 9 NewDocument8 pagesPráctica 9 NewDoris ReyesNo ratings yet
- Griet DSP ProgramsDocument14 pagesGriet DSP ProgramsJaipaul CheernamNo ratings yet
- Lab0 CDocument5 pagesLab0 CJorge Cruz Mancilla100% (1)
- Cpu - Timer0 - Isr Initxintf: #Include "Dsp28X - Project.H"Document3 pagesCpu - Timer0 - Isr Initxintf: #Include "Dsp28X - Project.H"RajendraNo ratings yet
- Small DC Motor Control by PWM Method Using Atmega8Document4 pagesSmall DC Motor Control by PWM Method Using Atmega8Emin KültürelNo ratings yet
- PID Position Control Dspic 30f2020Document4 pagesPID Position Control Dspic 30f2020FREEDOMHOUSE100% (3)
- Interrupts in ARM LPC2148Document5 pagesInterrupts in ARM LPC2148ultimatekp144No ratings yet
- TX & RX Sample CodeDocument8 pagesTX & RX Sample CodeMadianita EstradaNo ratings yet
- PWM CDocument2 pagesPWM CMore FunNo ratings yet
- BAseDocument5 pagesBAseJhon PerezNo ratings yet
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- Ee 222 CepDocument10 pagesEe 222 CepObed AhmadNo ratings yet
- PIC C Command SummaryDocument14 pagesPIC C Command SummaryEdmond LamNo ratings yet
- roject mẫu AVR2Document58 pagesroject mẫu AVR2luuvuduc81No ratings yet
- Fa20-Bee-150 MP Lab Report - 10Document6 pagesFa20-Bee-150 MP Lab Report - 10Saadat KhanNo ratings yet
- Program Frekuensi CounterDocument3 pagesProgram Frekuensi CounterM Surya PrayogaNo ratings yet
- Bài tập CCSDocument15 pagesBài tập CCSBảo Siêu GấuNo ratings yet
- Tech ME007 PDFDocument12 pagesTech ME007 PDFfredniels100% (2)
- Cheatsheet SuPDocument9 pagesCheatsheet SuPoana natarauNo ratings yet
- StopWatch CDocument6 pagesStopWatch CInderJeet Gehlot100% (1)
- Typedef Unsigned Char Typedef Unsigned Int Typedef Unsigned LongDocument8 pagesTypedef Unsigned Char Typedef Unsigned Int Typedef Unsigned LongAmir Si KetengNo ratings yet
- Programa SPI MestreDocument5 pagesPrograma SPI MestreAlan Robson100% (1)
- Timer Interrupts: Here Arduino Due Forum PostDocument7 pagesTimer Interrupts: Here Arduino Due Forum PostAlbert DeluqueNo ratings yet
- PIDDocument4 pagesPIDIgnacioMartíNo ratings yet
- LPC1769 Interrupt ProgramDocument9 pagesLPC1769 Interrupt Programprathap100% (1)
- ArduinoDocument6 pagesArduinoYoussef MantouranNo ratings yet
- Main Code Lab 7Document4 pagesMain Code Lab 7William HuangNo ratings yet
- Pic C Sample Code Rs232Document3 pagesPic C Sample Code Rs232Med HilalismeNo ratings yet
- New Microsoft Word DocumentDocument22 pagesNew Microsoft Word DocumentUsama FaisalNo ratings yet
- Çalışıyor GibiDocument11 pagesÇalışıyor GibiAli Arda YıldızNo ratings yet
- MainDocument4 pagesMainhichem eptNo ratings yet
- 18f4550 PWM ExampleDocument2 pages18f4550 PWM Examplesalilpn2No ratings yet
- RPMDocument18 pagesRPMCarlos Alberto Venancio PerezNo ratings yet
- PIC18 Pulse Width ModulationDocument16 pagesPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Part 3 C Peripheral InterfacesDocument27 pagesPart 3 C Peripheral InterfacesSashikanth BethaNo ratings yet
- Max6675 Pic16f877aDocument3 pagesMax6675 Pic16f877aVICTOR HUGO HERNANDEZ CISNEROSNo ratings yet
- EXP NO.6 RemovedDocument10 pagesEXP NO.6 RemovedOM SARDESAI225286No ratings yet
- G14 A03 ReportDocument4 pagesG14 A03 Reportpranay kamal kamalNo ratings yet
- Adcpic CodeDocument8 pagesAdcpic CodeRida Batool100% (1)
- Keyboard - C: Programa en C USB PIC18FDocument11 pagesKeyboard - C: Programa en C USB PIC18FLuis GonzalesNo ratings yet
- Program Initial For CCS CommandDocument15 pagesProgram Initial For CCS CommandThuhtay AgNo ratings yet
- Program ESC 2019Document8 pagesProgram ESC 2019Aris100% (1)
- Project CodeDocument6 pagesProject CodeK M Kiran KumarNo ratings yet
- CED19I032Document20 pagesCED19I032Pranavram VNo ratings yet
- E:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hDocument7 pagesE:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hVinícius Lopes Sampaio100% (1)
- VerilogDocument22 pagesVerilogSyurga FathonahNo ratings yet
- True RMSDocument5 pagesTrue RMSnguyen van ANNo ratings yet
- Kalkulasi DataDocument1 pageKalkulasi Datarendi triNo ratings yet
- Multi Freq PWM g2452 Example.cDocument2 pagesMulti Freq PWM g2452 Example.cAlberto Corona MartinezNo ratings yet
- Avg AdcDocument5 pagesAvg AdcShreeharsha KolthayaNo ratings yet
- ArduinoDocument8 pagesArduinokhalidNo ratings yet
- PIC Power SupplyDocument0 pagesPIC Power Supplyaqdus100% (1)
- C51 ADC Program ExamplesDocument22 pagesC51 ADC Program ExamplesplcmanaNo ratings yet
- A Precise Delay Method in Cortex-M KernelDocument11 pagesA Precise Delay Method in Cortex-M KernelzhangjifanNo ratings yet
- Micro Lab 6Document10 pagesMicro Lab 6Hacker YousafzaiNo ratings yet
- Timer 1Document6 pagesTimer 1joxenoNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Metro 3Document1 pageMetro 3nilton_9365611No ratings yet
- Duct DesignDocument46 pagesDuct DesignPushp Dutt100% (3)
- Matlab NN ToolboxDocument18 pagesMatlab NN Toolboxnilton_9365611No ratings yet
- Spru949d - TMS320F2833x, 2823x External Interface (XINTF)Document38 pagesSpru949d - TMS320F2833x, 2823x External Interface (XINTF)nilton_9365611No ratings yet
- Spru812a (Conversor A D)Document46 pagesSpru812a (Conversor A D)Rômulo LiraNo ratings yet
- PatentsDocument8 pagesPatentsWilliam CañónNo ratings yet
- sprs439h - TMS320F28335Document200 pagessprs439h - TMS320F28335nilton_9365611No ratings yet
- DSP2833x Header Files Quick Start ReadmeDocument59 pagesDSP2833x Header Files Quick Start ReadmeJuan Pablo AyalaNo ratings yet
- Lab 1Document10 pagesLab 1nilton_9365611No ratings yet
- Lab 2Document8 pagesLab 2nilton_9365611No ratings yet
- Adc PWMDocument9 pagesAdc PWMnilton_9365611No ratings yet
- H 1Document7 pagesH 1nilton_9365611No ratings yet
- Ed / - Ing Adjectives: PositiveDocument3 pagesEd / - Ing Adjectives: Positivenilton_9365611No ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Lavo 3Document3 pagesLavo 3nilton_9365611No ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- MID01Document1 pageMID01Marcel SalesNo ratings yet
- 1Document1 page1nilton_9365611No ratings yet
- 1Document1 page1nilton_9365611No ratings yet
- A Control System Using Parallel Interface.: Microprocessor ControllerDocument4 pagesA Control System Using Parallel Interface.: Microprocessor Controllernovo orderNo ratings yet
- CP FinalDocument165 pagesCP FinalVikki KotaNo ratings yet
- 08 Ancrel TraitsDocument3 pages08 Ancrel TraitsEDUARDO ALCANTARA DUQUE DA SILVANo ratings yet
- Final Unit III CC 2022Document71 pagesFinal Unit III CC 2022sairabanu pansareNo ratings yet
- Seqrite EPS Cloud GuideDocument104 pagesSeqrite EPS Cloud Guidert1220011No ratings yet
- Https Retail - Onlinesbi.com Retail MobilenoupdateguidelinesDocument1 pageHttps Retail - Onlinesbi.com Retail MobilenoupdateguidelinesEr Biswajit Biswas100% (1)
- Compiler-Lexical AnalysisDocument59 pagesCompiler-Lexical Analysisvidhya_bineesh100% (1)
- Excel MacrosDocument2 pagesExcel MacrosSudarshan RaoNo ratings yet
- Linergy CataListino 2018 21.2 EN PDFDocument99 pagesLinergy CataListino 2018 21.2 EN PDFPaulo MuñozNo ratings yet
- Gastritis: Free TemplatesDocument57 pagesGastritis: Free TemplatesJonathanNo ratings yet
- Enabling Secure Session Cookies On The OracleDocument4 pagesEnabling Secure Session Cookies On The OracleSridhar Vangapally VNo ratings yet
- ASHIDA RMU Automation BrochureDocument3 pagesASHIDA RMU Automation Brochurerahulyadav2121545No ratings yet
- 2 & 5 MarksDocument25 pages2 & 5 MarksSamarth PhutelaNo ratings yet
- Q10896/Fibonacciseries - Java: S.No: 2 Date: 2022-04-12Document2 pagesQ10896/Fibonacciseries - Java: S.No: 2 Date: 2022-04-12Saiganesh ReddymeniNo ratings yet
- FAL (2022-23) CSE1005 ETH AP2022232000353 Reference Material I 16-Aug-2022 Zero HourDocument10 pagesFAL (2022-23) CSE1005 ETH AP2022232000353 Reference Material I 16-Aug-2022 Zero HourRaghu GINo ratings yet
- MAG8000Document23 pagesMAG8000khaldoun samiNo ratings yet
- Fourth Quarterly ExaminationDocument2 pagesFourth Quarterly ExaminationNorhana SamadNo ratings yet
- Error Code ListDocument29 pagesError Code ListBipin SinghNo ratings yet
- Joyce ResumeDocument3 pagesJoyce ResumeDhaval PatelNo ratings yet
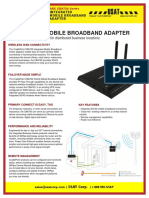
- CradlePoint ARC CBA 750 SpecsheetDocument3 pagesCradlePoint ARC CBA 750 SpecsheetBuchi ReddyNo ratings yet
- Comparc Cpo203Document39 pagesComparc Cpo203jerick_alviaNo ratings yet
- Computer Skills: MS Programs & The Internet Section 1, Page 1 of 17Document17 pagesComputer Skills: MS Programs & The Internet Section 1, Page 1 of 17Michael FissehaNo ratings yet
- Cdac PrepareDocument2 pagesCdac PrepareKushagra Singh50% (2)
- Kyocera TASKalfa 3212i BrochureDocument8 pagesKyocera TASKalfa 3212i BrochureULTIMA SERVICESNo ratings yet
- Mobile Packet Data Service (RS-232)Document23 pagesMobile Packet Data Service (RS-232)Gleb SokolovskiyNo ratings yet
- 3.2.2.4 Packet Tracer - Configuring Trunks (1) .PkaDocument2 pages3.2.2.4 Packet Tracer - Configuring Trunks (1) .PkaL hernandez AndersonNo ratings yet
- ASM Lab Day: ASM - Advanced Mitigation TechniquesDocument59 pagesASM Lab Day: ASM - Advanced Mitigation TechniquesLaptop salesNo ratings yet
- Curriculum VitaeDocument2 pagesCurriculum Vitaevenki125No ratings yet
- Computer Vision Based Workout Application Ijariie20437Document4 pagesComputer Vision Based Workout Application Ijariie20437viswanath1304No ratings yet
- M4 PLC - SCADA Ind. AutomationDocument3 pagesM4 PLC - SCADA Ind. AutomationA2IT Pvt. Ltd.No ratings yet