You might also like
- Winche Electrico en La Ingenieria Civil. - GRUPO 6 FinalDocument14 pagesWinche Electrico en La Ingenieria Civil. - GRUPO 6 FinalCarlos Enrique Silva DelgadoNo ratings yet
- Sistema de fábrica de bloques de hormigón celular Ytong-SiporexDocument58 pagesSistema de fábrica de bloques de hormigón celular Ytong-SiporexLuis BlNo ratings yet
- Cronograma de PracticasDocument4 pagesCronograma de PracticasAnghelo ItaNo ratings yet
- Visita planta hormigonera HérculesDocument10 pagesVisita planta hormigonera HérculesErika AvilésNo ratings yet
- Inspección y pruebas de recubrimientosDocument50 pagesInspección y pruebas de recubrimientosDarwin_SidneyNo ratings yet
- Riesgos químicos construcciónDocument23 pagesRiesgos químicos construcciónRaúl Strada50% (4)
- Ssoma - pl.001 Plan de Contingencia en CalicataDocument6 pagesSsoma - pl.001 Plan de Contingencia en CalicataMarcia AquinoNo ratings yet
- PT. ENCOFRADOS DE VIGAS - LOSa BLOQUE ADocument7 pagesPT. ENCOFRADOS DE VIGAS - LOSa BLOQUE ANimer A. Martinez ADNo ratings yet
- Cronograma de ActividadesDocument3 pagesCronograma de ActividadesYul QuiñonesNo ratings yet
- Formato Inspección de SeguridadDocument1 pageFormato Inspección de SeguridadKatherine Villalobos GomezNo ratings yet
- Transpaletas Manuales Linea PremiumDocument3 pagesTranspaletas Manuales Linea PremiumSegundo FernandezNo ratings yet
- Diseño de Vigas Método LRFDDocument13 pagesDiseño de Vigas Método LRFDFABIANNo ratings yet
- Guía de Instalación de Acometidas de Enlaces Con Fibra Óptica.Document3 pagesGuía de Instalación de Acometidas de Enlaces Con Fibra Óptica.JoseNo ratings yet
- Formato de Area de Trabajo Seguro (Ats)Document16 pagesFormato de Area de Trabajo Seguro (Ats)Nicoll Cespedes MogollonNo ratings yet
- Ensayo TriaxialDocument17 pagesEnsayo TriaxialAlejandro MolinaNo ratings yet
- Check List Corporativo Inspeccion Mensual de Herramientas y Equipos de ...Document1 pageCheck List Corporativo Inspeccion Mensual de Herramientas y Equipos de ...Patricio Cárcamo Olivares.No ratings yet
- Permiso de Espacio ConfinadoDocument3 pagesPermiso de Espacio ConfinadoMaykol Robert Ramirez GraweNo ratings yet
- Catalogo 3MDocument100 pagesCatalogo 3MAndres Chilet LeonNo ratings yet
- Ficha Tecnica - Calzado de SeguridadDocument2 pagesFicha Tecnica - Calzado de SeguridadRoddy BazurtoNo ratings yet
- Check List - EdificioDocument2 pagesCheck List - EdificioWendy Arce LázaroNo ratings yet
- Proceso de corte, esmerilado y soldadura de piezas metálicasDocument28 pagesProceso de corte, esmerilado y soldadura de piezas metálicasElvis ManquezNo ratings yet
- Sobre Tensiones Con MatlabDocument5 pagesSobre Tensiones Con MatlabJ J Contreras RolónNo ratings yet
- Señalamientos de Seguridad en PlantaDocument15 pagesSeñalamientos de Seguridad en PlantachuyjesusquirozNo ratings yet
- Prom ArtDocument2 pagesProm ArtAntonio OlavarriaNo ratings yet
- Importancia Del Peso Metrico Del AceroDocument3 pagesImportancia Del Peso Metrico Del AceroZe NaNo ratings yet
- ELB-COMUNIDADESDocument2 pagesELB-COMUNIDADESJimerson FlocupNo ratings yet
- Inst. Desencofrado de Losa AligeradaDocument4 pagesInst. Desencofrado de Losa AligeradaDavid SalgueroNo ratings yet
- Minería sostenibleDocument10 pagesMinería sostenibleJosé HidalgoNo ratings yet
- Terminal de Cruceros Bahia de MirafloresDocument9 pagesTerminal de Cruceros Bahia de MirafloresJuan Alejandro Hidalgo PachecoNo ratings yet
- Procedimiento de trabajo seguro en pozos y espacios confinadosDocument14 pagesProcedimiento de trabajo seguro en pozos y espacios confinadosEstherNo ratings yet
- Símbolos pictóricos para la manipulación segura de mercancías peligrosasDocument17 pagesSímbolos pictóricos para la manipulación segura de mercancías peligrosasJavier_CarazasNo ratings yet
- PST - Trabajs en Altura - Escalonamiento de EstructurasDocument3 pagesPST - Trabajs en Altura - Escalonamiento de EstructurasCR OtinianoNo ratings yet
- Orden y Aseo 5sDocument21 pagesOrden y Aseo 5sDayan EstrellaNo ratings yet
- Lista de Verificación de Vehiculos Pesados Versión 002 22.10.18Document1 pageLista de Verificación de Vehiculos Pesados Versión 002 22.10.18Jonathan Camas - JECGNo ratings yet
- Modelo Estandar para Lomo de AzDocument2 pagesModelo Estandar para Lomo de AzSandra Milena Contreras CarvajalNo ratings yet
- Reporte Fotografico Antes - Despues - 4T4R - PILCOMAYODocument1 pageReporte Fotografico Antes - Despues - 4T4R - PILCOMAYOEdu PomaNo ratings yet
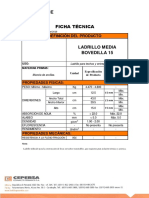
- Ficha Técnica de LadrilloDocument1 pageFicha Técnica de LadrilloKevin Ostyn Zelada AguadoNo ratings yet
- Anexo N 43 Programa de Trabajo Preventivo ACHSDocument8 pagesAnexo N 43 Programa de Trabajo Preventivo ACHSElsa SeguraNo ratings yet
- Comparación niveles potencia acústica maquinaria construcción Norma BritánicaDocument27 pagesComparación niveles potencia acústica maquinaria construcción Norma BritánicaManuel Isaias Rengifo CubaNo ratings yet
- Mantenimiento de CoberturasDocument28 pagesMantenimiento de CoberturasJUAN DANIEL CAMPOS MEDINANo ratings yet
- Excavación manual zanjasDocument2 pagesExcavación manual zanjasEduardo Damon Rodas CruzadoNo ratings yet
- Medición por Cuantía para Cimentaciones, Muros y Estructuras de HormigónDocument2 pagesMedición por Cuantía para Cimentaciones, Muros y Estructuras de HormigónJuan José ReyesNo ratings yet
- Ficha Tecnica 45KG Cloro Granulado Aquapool..Document1 pageFicha Tecnica 45KG Cloro Granulado Aquapool..Hector SanccaNo ratings yet
- Metrado Eficiente en RelaveraDocument2 pagesMetrado Eficiente en RelaveraVinzcent MolinaNo ratings yet
- F-MIL-ADM-01 - Check List de Vehiculos LivianosDocument2 pagesF-MIL-ADM-01 - Check List de Vehiculos LivianosRubenZuloagaNo ratings yet
- MTS - Ejemplo - Corte y SoldaduraDocument3 pagesMTS - Ejemplo - Corte y SoldaduraArq PinedaNo ratings yet
- Proyeccto FinalDocument12 pagesProyeccto FinalRodrigo PadillaNo ratings yet
- Formato ChequeraDocument1 pageFormato ChequeraLuis Fernando Chamorro CantaroNo ratings yet
- Aceleración y Curvatura PDFDocument16 pagesAceleración y Curvatura PDFnidejoNo ratings yet
- Deber 1 Yánez GuzmánDocument16 pagesDeber 1 Yánez GuzmánAlfonso Yanez ErazoNo ratings yet
- Modelado de Sistemas Dinamicos1Document75 pagesModelado de Sistemas Dinamicos1Diego BayonaNo ratings yet
- Taller Funciones VectorialesDocument3 pagesTaller Funciones Vectorialesj gNo ratings yet
- Platica Ing PalomeraDocument32 pagesPlatica Ing PalomeraAlberto CastroNo ratings yet
- Ejercicios de Triedro Móvil y CurvaturaDocument5 pagesEjercicios de Triedro Móvil y CurvaturaJesus Ibarra TorrenegraNo ratings yet
- Sistemas lineales: Propiedades de la transformada de Laplace y FourierDocument13 pagesSistemas lineales: Propiedades de la transformada de Laplace y FourierDaniel AaleNo ratings yet
- Calculo de Las Funciones VectorialesDocument16 pagesCalculo de Las Funciones VectorialesAMYNNXXXX100% (2)
- Trabajo de Señales y Sistemas Fase 2Document19 pagesTrabajo de Señales y Sistemas Fase 2Andres GarzonNo ratings yet
- Semana 2Document20 pagesSemana 2liz karinaNo ratings yet
- Serie de FourierDocument6 pagesSerie de FourierVidal Crispin SantiestebanNo ratings yet
- Cálculo Modal-Factor de AmplificaciónDocument26 pagesCálculo Modal-Factor de AmplificaciónRankineNo ratings yet
- Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko Ogata PDFDocument757 pagesSistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko Ogata PDFOscar Andres RozoNo ratings yet
- NT11 Detalles ConstructivosDocument23 pagesNT11 Detalles ConstructivosRankineNo ratings yet
- Losas postesadas: técnicas y aplicaciones en edificaciónDocument98 pagesLosas postesadas: técnicas y aplicaciones en edificaciónignaciomoscosoNo ratings yet
- Estabilidad de Taludes Luis Bañon BlazquezDocument10 pagesEstabilidad de Taludes Luis Bañon BlazquezClaudio A. Carrasco S.No ratings yet
- Apuntes Calculos MaderaDocument10 pagesApuntes Calculos MaderaRankineNo ratings yet
- Instruccion para El Diseño de Firmes de AndalucíaDocument0 pagesInstruccion para El Diseño de Firmes de AndalucíadnollenbergerNo ratings yet
- Calculo Sismico CAP - IX-XIVDocument72 pagesCalculo Sismico CAP - IX-XIVRankineNo ratings yet
- Pilotes de Extraccion Carlos Oteo MazoDocument22 pagesPilotes de Extraccion Carlos Oteo MazoRankineNo ratings yet
- Cuaderno IntemacDocument36 pagesCuaderno IntemacRankine100% (1)
- Ic 3 TrazadoDocument93 pagesIc 3 TrazadoRankineNo ratings yet
- Problemas de Mecánica de RocasDocument185 pagesProblemas de Mecánica de RocasHolly WilliamsNo ratings yet
- Norma 6.1-IC Secciones de Firme PDFDocument33 pagesNorma 6.1-IC Secciones de Firme PDFTopografos AsturiasNo ratings yet
- Apertura de Huecos en Forjados de Hormigón Postesado Con Sistema AdherenteDocument5 pagesApertura de Huecos en Forjados de Hormigón Postesado Con Sistema AdherenteRankineNo ratings yet
- Cuaderno IntemacDocument36 pagesCuaderno IntemacRankine100% (1)
- Une-Env - 1991-Ec1 - Acciones en Estructuras PDFDocument138 pagesUne-Env - 1991-Ec1 - Acciones en Estructuras PDFJavier Alonso Losada100% (1)
- PortoQuintian JesusManuel PFC 2005 02de5Document89 pagesPortoQuintian JesusManuel PFC 2005 02de5Felipe MoralesNo ratings yet
- Cuaderno IntemacDocument36 pagesCuaderno IntemacRankine100% (1)
- Teoremas de rotura y cálculo de arcosDocument8 pagesTeoremas de rotura y cálculo de arcosRankineNo ratings yet
- PortoQuintian JesusManuel PFC 2005 02de5Document89 pagesPortoQuintian JesusManuel PFC 2005 02de5Felipe MoralesNo ratings yet
- Análisis Dinámico de Estructuras en El Dominio de La FrecuenciaDocument87 pagesAnálisis Dinámico de Estructuras en El Dominio de La FrecuenciaRankineNo ratings yet
- CTE Parte 2 DB SUDocument35 pagesCTE Parte 2 DB SUTomás CVNo ratings yet
- Acciones en Puentes NORMATIVA PDFDocument88 pagesAcciones en Puentes NORMATIVA PDFRankineNo ratings yet
- Acciones en Puentes NORMATIVA PDFDocument88 pagesAcciones en Puentes NORMATIVA PDFRankineNo ratings yet
- Juntas de HormigonadoDocument4 pagesJuntas de HormigonadoRankineNo ratings yet
- Anclajes MaderaDocument260 pagesAnclajes MaderaRankineNo ratings yet
- TALUDDocument304 pagesTALUDpalacioslwNo ratings yet
- Una Breve Introducción Al Cálculo SísmicoDocument171 pagesUna Breve Introducción Al Cálculo SísmicoRankineNo ratings yet
- RD 751 2011 Instruccion Acero Estructural EAE 2011 ComentadaDocument658 pagesRD 751 2011 Instruccion Acero Estructural EAE 2011 ComentadaRankineNo ratings yet
- Desarrollo comunitario a partir de la mujer indígenaDocument174 pagesDesarrollo comunitario a partir de la mujer indígenaWerner Ruben Granados NavarroNo ratings yet
- PAPERS-7 7 7 N°5-EspañolDocument28 pagesPAPERS-7 7 7 N°5-EspañolculosoNo ratings yet
- Luis Loreto 2Document9 pagesLuis Loreto 2Juan Carlos PerezNo ratings yet
- Ficha BoasDocument4 pagesFicha Boasspitt booNo ratings yet
- Ciclo Básico Secundaria ChacoDocument305 pagesCiclo Básico Secundaria ChacoFernandoG.SotomayorNo ratings yet
- Del Método Científico Al Clínico. Consideraciones Teóricas.Document6 pagesDel Método Científico Al Clínico. Consideraciones Teóricas.Hector SanchezNo ratings yet
- Tríptico Estructuralismo y HumanismoDocument2 pagesTríptico Estructuralismo y HumanismoBRITHANY PAMELA PAOLA QUIMPER SOTONo ratings yet
- Esquema de LlavesDocument1 pageEsquema de LlavesDannia DelgadoNo ratings yet
- Matemáticas ActuarialesDocument20 pagesMatemáticas ActuarialesCynnthia' Coopeer'No ratings yet
- 1 - Conferencias de Introducción Al Psicoanálisis - Freud PDFDocument11 pages1 - Conferencias de Introducción Al Psicoanálisis - Freud PDFMariana Daniele Rodríguez100% (2)
- Oferta Educativa WebDocument17 pagesOferta Educativa WebFany AvilezNo ratings yet
- Hermenéutica TerryDocument156 pagesHermenéutica TerryLeandro Velardo100% (2)
- Investigacion OperativaDocument36 pagesInvestigacion OperativaPaola MamaniNo ratings yet
- Condicion Al Doc XDocument5 pagesCondicion Al Doc XDarwinAgudeloNo ratings yet
- Pérez Rocha PDFDocument8 pagesPérez Rocha PDFAiry DominiqueNo ratings yet
- Julio Muñoz Rubio (2017) Psicología Evolutiva Enredos y Simplismos de Una Ciencia Vulgar PDFDocument304 pagesJulio Muñoz Rubio (2017) Psicología Evolutiva Enredos y Simplismos de Una Ciencia Vulgar PDFMnwel Prr67% (3)
- Unidad 2 Areas Del Conocimiento y Del DesarrolloDocument21 pagesUnidad 2 Areas Del Conocimiento y Del DesarrolloEsmeraldaGarciaNo ratings yet
- Guía Académica de Grado 2018Document202 pagesGuía Académica de Grado 2018Ajenjo MataNo ratings yet
- Diagnóstico de Estilos de Aprendizaje "Cuestionario Honey-Alonso"Document8 pagesDiagnóstico de Estilos de Aprendizaje "Cuestionario Honey-Alonso"PaulNo ratings yet
- La Importancia de Las Teorías para El Apoyo de Los Procesos Pedagógicos Que Desarrolla El DocenteDocument2 pagesLa Importancia de Las Teorías para El Apoyo de Los Procesos Pedagógicos Que Desarrolla El Docentefraberjiz100% (2)
- Temario Repaso - Letras PDFDocument3 pagesTemario Repaso - Letras PDFGabriel Montani SucaNo ratings yet
- Secundaria Del FuturoDocument20 pagesSecundaria Del FuturoNueva Ciudad100% (1)
- Propuesta Pedagógica Jornada ÚnicaDocument9 pagesPropuesta Pedagógica Jornada ÚnicaFernandoNo ratings yet
- Glosario de Terminos EpistemologiaDocument2 pagesGlosario de Terminos EpistemologiaEduquemos A Jimenez0% (1)
- Prueba Hipótesis Varianza ProporciónDocument10 pagesPrueba Hipótesis Varianza ProporciónAntonio MaldonadoNo ratings yet
- Representación matricial del espacio y tiempoDocument10 pagesRepresentación matricial del espacio y tiempoDiego 797100% (1)
- Triangulación como Estrategia Investigación Ciencias SocialesDocument10 pagesTriangulación como Estrategia Investigación Ciencias SocialesCecilia GrandNo ratings yet
- Estudios Observacionales - UCVDocument4 pagesEstudios Observacionales - UCVEmma CotrinaNo ratings yet
- Laboratorio 1 (Teoría de Errores)Document5 pagesLaboratorio 1 (Teoría de Errores)Jorge Daniel Guzmán ZapataNo ratings yet
- Key Dimensions of Digital Maturity A Study With Retail Sector Companies in BrazilRevista de Administracao MackenzieDocument29 pagesKey Dimensions of Digital Maturity A Study With Retail Sector Companies in BrazilRevista de Administracao MackenzieMelody Rivera AlcoserNo ratings yet