You might also like
- 01 Cuerpo Del Trabajo (Recuperación de Una PCH La Planta Choroní Aragua) PDFDocument124 pages01 Cuerpo Del Trabajo (Recuperación de Una PCH La Planta Choroní Aragua) PDFleonard coronilNo ratings yet
- Transferencia de EnergíaDocument19 pagesTransferencia de EnergíaAnuar IvanNo ratings yet
- Máquinas motrices y térmica: entalpía y procesos isentrópicosDocument4 pagesMáquinas motrices y térmica: entalpía y procesos isentrópicosJarlinton BustamanteNo ratings yet
- Informe de Digitales (Reloj Digital)Document6 pagesInforme de Digitales (Reloj Digital)Alex AndradeNo ratings yet
- Perfil de NACA 0012Document13 pagesPerfil de NACA 0012JavierIgnacioBastidasMoraNo ratings yet
- UNIDAD 1 Introducción TurbomáquinasDocument23 pagesUNIDAD 1 Introducción TurbomáquinasRonald V. Nina VelizNo ratings yet
- Tutorial001Capitulo002 ProteusDocument38 pagesTutorial001Capitulo002 ProteusSthal BmNo ratings yet
- Control de lámpara con fotoresistorDocument2 pagesControl de lámpara con fotoresistorRaul R. GutierrezNo ratings yet
- Sags y SwellsDocument11 pagesSags y SwellsDixon CuadrosNo ratings yet
- Estructuras en Media Tensión utilizadas en EcuadorDocument10 pagesEstructuras en Media Tensión utilizadas en EcuadorElvis TubonNo ratings yet
- Generación de tonos musicales con PIC y buzzerDocument34 pagesGeneración de tonos musicales con PIC y buzzerAleXander DiiazNo ratings yet
- Diseño I Carga VariableDocument71 pagesDiseño I Carga Variablefpayares4619100% (2)
- Impulsos Tipo Rayo Tipo ManiobraDocument7 pagesImpulsos Tipo Rayo Tipo ManiobraJorge Zúñiga BustamanteNo ratings yet
- Proceso de fatiga baja frecuenciaDocument11 pagesProceso de fatiga baja frecuenciaZoombisito FrancoNo ratings yet
- Guía - Práctica Ejercicios en Clase - 1Document5 pagesGuía - Práctica Ejercicios en Clase - 1Luis GalarzaNo ratings yet
- PR10 - Mando Cilindro Doble Efecto-AndDocument2 pagesPR10 - Mando Cilindro Doble Efecto-AndrobmilaNo ratings yet
- Trabajo Final de SemestreDocument14 pagesTrabajo Final de Semestrefelipe merchanNo ratings yet
- Transitorios OscilatoriosDocument19 pagesTransitorios OscilatoriosSandraNo ratings yet
- Laboratorio 6 Maquinas Eléctricas 2Document5 pagesLaboratorio 6 Maquinas Eléctricas 2Mark OnofreNo ratings yet
- Coordinación de Reles de SobrecorrienteDocument4 pagesCoordinación de Reles de SobrecorrienteNatalia100% (1)
- Arranque de Motores Trifásicos de InducciónDocument12 pagesArranque de Motores Trifásicos de InducciónMaría Teresa Hernández Gamarra100% (2)
- T1-Ui-Sistemas CableadosDocument4 pagesT1-Ui-Sistemas CableadosjesustarinNo ratings yet
- 05 Circuitos PolifasicosDocument15 pages05 Circuitos PolifasicosAxel Dullak AngeloniNo ratings yet
- Sobretensiones Transitorias Gama CSC PDFDocument6 pagesSobretensiones Transitorias Gama CSC PDFAlexRojanoNo ratings yet
- Laboratorio II de MaquinasDocument37 pagesLaboratorio II de MaquinasWefer AbadNo ratings yet
- Codigo de RelesDocument10 pagesCodigo de Relesthermin5No ratings yet
- Central Hidroelectrica ConceptoDocument2 pagesCentral Hidroelectrica Conceptofranco darkNo ratings yet
- Regulador de TensiónDocument8 pagesRegulador de TensiónPaúl Adán Serna TorreNo ratings yet
- Protección de Alimentadores de Distribución Contra Fallas SimultáneasDocument10 pagesProtección de Alimentadores de Distribución Contra Fallas SimultáneasRicardo Valdez GerardoNo ratings yet
- 5-Flujo de PotenciaDocument31 pages5-Flujo de PotenciaMauricio JofréNo ratings yet
- Centro de Control de Motores (CCM)Document11 pagesCentro de Control de Motores (CCM)Karelis VargasNo ratings yet
- Calculo de PanelesDocument8 pagesCalculo de PanelesMoises Marsos100% (1)
- Capitulo I - CFP - IESalta - 2021Document22 pagesCapitulo I - CFP - IESalta - 2021DANIEL CABRERANo ratings yet
- Banco de Preguntas - Segundo ParcialDocument6 pagesBanco de Preguntas - Segundo ParcialAdhemar MaydanaNo ratings yet
- Practica 2 Maquinas ElectricasDocument16 pagesPractica 2 Maquinas ElectricasRicardo Cisneros GonzalezNo ratings yet
- Sylabus Potencia2 2007B UNSA ArequipaDocument4 pagesSylabus Potencia2 2007B UNSA ArequipaJuan VelascoNo ratings yet
- Circuito Paralelo RLCDocument14 pagesCircuito Paralelo RLCBridenEspinozaNo ratings yet
- Laboratorio 1 ResueltoDocument7 pagesLaboratorio 1 ResueltoArmando FreireNo ratings yet
- Informe de A.T Protecciones RPDocument12 pagesInforme de A.T Protecciones RPVentas OsornoNo ratings yet
- Suscríbete a DeepL Pro y edita este documentoDocument68 pagesSuscríbete a DeepL Pro y edita este documentoalejandro palomo ballestaNo ratings yet
- Electronica de Potencia Lab 4Document7 pagesElectronica de Potencia Lab 4Fabrizio ChanaméNo ratings yet
- Catalogo Square DDocument291 pagesCatalogo Square DFrancisco Villa50% (2)
- Relés DiferencialesDocument7 pagesRelés DiferencialesJosueSaavedraYanayacoNo ratings yet
- Investigacion UjtDocument6 pagesInvestigacion UjtDavidHernándezDomínguezNo ratings yet
- Sistemas Electricos de PotenciaDocument7 pagesSistemas Electricos de Potenciadani19a100% (1)
- Diagramas Electricos Equivalentes DIN NEMADocument4 pagesDiagramas Electricos Equivalentes DIN NEMABrixo MXNo ratings yet
- Informe #1 Ensayos Vacío y Cortocircuitó Del TransformadorDocument8 pagesInforme #1 Ensayos Vacío y Cortocircuitó Del TransformadorLuis Manuel Rodriguez100% (1)
- Cálculo de corrientes de cortocircuito en instalaciones eléctricasDocument26 pagesCálculo de corrientes de cortocircuito en instalaciones eléctricasEnrique RodriguezNo ratings yet
- Practica 1Document10 pagesPractica 1Jesus David Tecalco ViverosNo ratings yet
- Guia de Triac DiacDocument6 pagesGuia de Triac DiacAlejandro MtzNo ratings yet
- Eval 1 Protecciones de FariaDocument2 pagesEval 1 Protecciones de FariaJose TomassettiNo ratings yet
- Tarea 34. Transitorio de Un Circuito en Serie RL Utilizando ATPDocument9 pagesTarea 34. Transitorio de Un Circuito en Serie RL Utilizando ATPdmdgvoNo ratings yet
- Implementación de arrancador suave y control de fase AC/ACDocument20 pagesImplementación de arrancador suave y control de fase AC/ACFernando Zapata SegoviaNo ratings yet
- Control de fase directo con ArduinoDocument7 pagesControl de fase directo con ArduinoEfren QuilumbaNo ratings yet
- Informe Control de FaseDocument10 pagesInforme Control de FaseFernanda MorenoNo ratings yet
- Regulador de PotenciaDocument8 pagesRegulador de PotenciaMacarena FloresNo ratings yet
- Circuito Con SCR y TriacDocument11 pagesCircuito Con SCR y TriacaldoNo ratings yet
- LABEPI Silva Ram Rez JUEVES PRACTICA 5 GDocument3 pagesLABEPI Silva Ram Rez JUEVES PRACTICA 5 GLuis ernestoNo ratings yet
- Proyectos de instalaciones eléctrica de baja tensiónFrom EverandProyectos de instalaciones eléctrica de baja tensiónRating: 5 out of 5 stars5/5 (1)
- Inspeccion Alternador PrincipalDocument8 pagesInspeccion Alternador PrincipalMarcelo Mamani ValerianoNo ratings yet
- Informe Amplificador de AudioDocument8 pagesInforme Amplificador de AudioYeral Belfort VilcaNo ratings yet
- Arquitectura OdtDocument49 pagesArquitectura OdtAngel Miranda ValenciaNo ratings yet
- Informe N 5 Ensayo en Carga (Metodo Directo)Document12 pagesInforme N 5 Ensayo en Carga (Metodo Directo)Andrea Aro PacoNo ratings yet
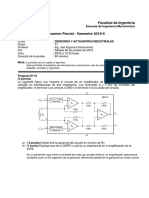
- 2019-II Sensores y Actuadores Industriales p2Document6 pages2019-II Sensores y Actuadores Industriales p2Guillermo Bautista100% (1)
- TDS Connector de SuperficieDocument1 pageTDS Connector de SuperficieErly Yahuana BerrúNo ratings yet
- Uni FisicaDocument10 pagesUni FisicaJunior ArmasNo ratings yet
- Cuadro ComparativoDocument1 pageCuadro ComparativoHéctor BolívarNo ratings yet
- Procesamiento DatosDocument12 pagesProcesamiento DatosChristy EstradaNo ratings yet
- Revista Amigurumis Especial PerrosDocument26 pagesRevista Amigurumis Especial PerrosPaula88% (8)
- Dynadock User's ManualDocument0 pagesDynadock User's ManualretraidNo ratings yet
- Mantención electrónica sensores Komatsu palas camionesDocument69 pagesMantención electrónica sensores Komatsu palas camionesJose Alfredo Rojas Uribe75% (8)
- Lest CarpinteroDocument22 pagesLest CarpinteroVERONICA ISABEL MIRANDA CRAVIOTONo ratings yet
- Guia de Instalacion RiSK 2018 PDFDocument7 pagesGuia de Instalacion RiSK 2018 PDFMiguelPezoNo ratings yet
- Circuitos Secuenciales Asincronos PDFDocument51 pagesCircuitos Secuenciales Asincronos PDFAlfonso Armando Pérez CerdaNo ratings yet
- Practica No 4 ResonanciaDocument33 pagesPractica No 4 Resonanciaalexis lugoNo ratings yet
- DPI 620 Manual Spanish - 11Document84 pagesDPI 620 Manual Spanish - 11Luis Puma100% (1)
- Qué Es Un Modulador PWM y Par Que SirveDocument4 pagesQué Es Un Modulador PWM y Par Que SirveJuancho Animalito LmcNo ratings yet
- BBC 30Document33 pagesBBC 30Eric Rodrigues0% (1)
- Eeit Eeit-423 Ejercicio T007Document3 pagesEeit Eeit-423 Ejercicio T007Ronald I.No ratings yet
- Ma58 2010 00 S01 01 Dc-ElectrostaticaDocument32 pagesMa58 2010 00 S01 01 Dc-ElectrostaticaJuan Jose Mattus ZapataNo ratings yet
- Libro Variadores AMorenoDocument224 pagesLibro Variadores AMorenoi92nasedNo ratings yet
- Informe #7Document6 pagesInforme #7KevinNo ratings yet
- Ingeniería de Máquinas y Sistemas Eléctricos - Nomenclatura ANSI - IEEE para Dispositivos de ProtecciónDocument11 pagesIngeniería de Máquinas y Sistemas Eléctricos - Nomenclatura ANSI - IEEE para Dispositivos de ProtecciónJosé Quetzalcoatl Ramírez JuradoNo ratings yet
- Transformadores de PotenciaDocument111 pagesTransformadores de PotenciaCarlos Eduardo Berrospi ChacaNo ratings yet
- Válvula Termoiónica o Tubo Al VacioDocument8 pagesVálvula Termoiónica o Tubo Al Vaciosergio073No ratings yet
- Procesos de manufactura con control numéricoDocument10 pagesProcesos de manufactura con control numéricoMartin Aranda TorresNo ratings yet
- Instrucción Técnica Complementaria MIE RAT 12Document8 pagesInstrucción Técnica Complementaria MIE RAT 12scribdusuario2No ratings yet
- Ejemplo Informe de Laboratorio IEEEDocument4 pagesEjemplo Informe de Laboratorio IEEEjuandavidhh527No ratings yet
- Wind TelecomDocument21 pagesWind TelecomJuan PerezNo ratings yet