You might also like
- Gravimetric FeederDocument47 pagesGravimetric FeederYousuf Ali67% (3)
- Vehicle Speed Control System Using RF CommunicationDocument80 pagesVehicle Speed Control System Using RF CommunicationSaheb Amrinder100% (6)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Panasonic Sr-jhs18-Nsd Rice Cooker SMDocument42 pagesPanasonic Sr-jhs18-Nsd Rice Cooker SMBảo BìnhNo ratings yet
- Using The MC3PHAC Motor Controller: Application NoteDocument50 pagesUsing The MC3PHAC Motor Controller: Application NoteBarba LuisNo ratings yet
- 3 Phase Motor DriverDocument6 pages3 Phase Motor DriverIon MoldoveanuNo ratings yet
- Railway Accident Monitoring System: A Project Report ONDocument13 pagesRailway Accident Monitoring System: A Project Report ONPrateek SrivastavNo ratings yet
- 73M2921 Advanced Single Chip Modem: Description FeaturesDocument42 pages73M2921 Advanced Single Chip Modem: Description FeaturesRicardo MercadoNo ratings yet
- Arm Cortex (LPC 2148) Based Motor Speed ControlDocument25 pagesArm Cortex (LPC 2148) Based Motor Speed ControlUday Wankar100% (1)
- 00718a - Brush-DC Servomotor Implementation Using PIC17C756ADocument33 pages00718a - Brush-DC Servomotor Implementation Using PIC17C756AadisaksNo ratings yet
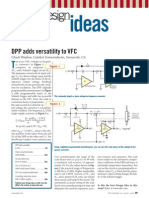
- Voltage To Frequency ConverterDocument7 pagesVoltage To Frequency ConverterRodfer SorianoNo ratings yet
- Vehicle Speed Control System Using RF CommunicationDocument20 pagesVehicle Speed Control System Using RF CommunicationRaina John100% (2)
- A4988 DatasheetDocument20 pagesA4988 DatasheetJose OnoNo ratings yet
- A4989 DatasheetDocument17 pagesA4989 DatasheetGopalkrishnan Nadar100% (1)
- TWRKV46F150 PMSM SensorlessDocument22 pagesTWRKV46F150 PMSM Sensorlessb_dupNo ratings yet
- 217 3367 JaguarDatasheetDocument16 pages217 3367 JaguarDatasheetYi Cong HuangNo ratings yet
- Thyristor Power Control by IR RemoteDocument22 pagesThyristor Power Control by IR Remotevivek100% (1)
- 3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingDocument12 pages3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingPero01No ratings yet
- DRV 8811Document22 pagesDRV 8811nelson_loboNo ratings yet
- Microcontrollers and TRIAC-Based Dimmers-CD00003820Document11 pagesMicrocontrollers and TRIAC-Based Dimmers-CD00003820Dan EsentherNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- 3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80XDocument24 pages3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80Xrutu_jnecNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- SCADADocument57 pagesSCADAkailasamvv100% (1)
- Programming Guide AQUADocument230 pagesProgramming Guide AQUADejan MihailovicNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Developing Islanding Arrangement Automatically For Grid On Sensing Bad Voltage or FrequencyDocument29 pagesDeveloping Islanding Arrangement Automatically For Grid On Sensing Bad Voltage or FrequencyNitin AdamNo ratings yet
- A3979 DatasheetDocument15 pagesA3979 DatasheetИван КосмонавтNo ratings yet
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 pagesCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoNo ratings yet
- Ac Voltage Controller Using Thyristor Project Report by SandeepDocument29 pagesAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- WIRE LESS Land Mine Detection Robo-VehicleDocument35 pagesWIRE LESS Land Mine Detection Robo-VehicleDebashish BeheraNo ratings yet
- ADMC201Document15 pagesADMC201Ariana Ribeiro LameirinhasNo ratings yet
- Data SheetDocument9 pagesData SheetLesseigne Marie-ClaireNo ratings yet
- 3 Axis TB6600 CNC Driver Board Users ManualDocument10 pages3 Axis TB6600 CNC Driver Board Users Manualalvarnal100% (2)
- TLC 59116 FDocument33 pagesTLC 59116 FhfuishNo ratings yet
- Microchip Motor ControlDocument16 pagesMicrochip Motor ControlOctavio AsNo ratings yet
- A 4983Document16 pagesA 4983Boreal3000No ratings yet
- Advanced Three Phase PWM Inverter Control Using MicrocontrollerDocument8 pagesAdvanced Three Phase PWM Inverter Control Using MicrocontrollerAbdur Rehman TayyabNo ratings yet
- DRV8305 - 3F Gate DR W-Current SH Amp & VDRDocument54 pagesDRV8305 - 3F Gate DR W-Current SH Amp & VDRarturoncNo ratings yet
- MP3389 r1.04Document16 pagesMP3389 r1.04Andres Alegria100% (1)
- FRC Jaguar Datasheet PDFDocument16 pagesFRC Jaguar Datasheet PDFJuan de Dios Alardín HernándezNo ratings yet
- Nonvolatile Memory 8-Kbit E Prom With C Bus Interface SDA 2586-5Document12 pagesNonvolatile Memory 8-Kbit E Prom With C Bus Interface SDA 2586-5insomnium86No ratings yet
- User Manual For Speed Control of BLDC Motor Using DspicDocument12 pagesUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcNo ratings yet
- Pic Servo SCDocument51 pagesPic Servo SCFvck Ccp100% (1)
- 3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80XDocument24 pages3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80Xjulio100% (1)
- Microchip MCP7940M Low Cost I2C Real Time Clock Calendar With SRAMDocument39 pagesMicrochip MCP7940M Low Cost I2C Real Time Clock Calendar With SRAM邱子威No ratings yet
- Chapter Three2Document12 pagesChapter Three2Fuh ValleryNo ratings yet
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDocument24 pagesNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierNo ratings yet
- Elemento de Flujo TVTHILL1Document50 pagesElemento de Flujo TVTHILL1Rafael Martin Anaya FigueroaNo ratings yet
- The Drive Design of The STM32-based Brushless DC Motor: Song Wang, Wang Guo, Wenqiang DunDocument9 pagesThe Drive Design of The STM32-based Brushless DC Motor: Song Wang, Wang Guo, Wenqiang DunMarco LisiNo ratings yet
- At91sam7s64 DsDocument491 pagesAt91sam7s64 DsLord_JoelNo ratings yet
- 3-Phase Sensorless BLDC Motor Control Development Kit With MC9S12G128 MCUDocument40 pages3-Phase Sensorless BLDC Motor Control Development Kit With MC9S12G128 MCUBogdan CosteaNo ratings yet
- CNC Shield For A4988Document7 pagesCNC Shield For A4988vaxewiNo ratings yet
- MDCC-T30 0 11Document7 pagesMDCC-T30 0 11darrylcarvalhoNo ratings yet
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- PF0030 Series: MOS FET Power AmplifierDocument20 pagesPF0030 Series: MOS FET Power AmplifierBảo BìnhNo ratings yet
- Rangkaian Pemancar Dengan MOSFETDocument20 pagesRangkaian Pemancar Dengan MOSFETBambang SujanarkoNo ratings yet
- IEEE STD C57.98-1993 - IEEE Guide For Transformer Impulse Tests.Document59 pagesIEEE STD C57.98-1993 - IEEE Guide For Transformer Impulse Tests.anand_girgaonkar100% (1)
- Video 17 PDFDocument5 pagesVideo 17 PDFBảo BìnhNo ratings yet
- PF0030 Series: MOS FET Power AmplifierDocument20 pagesPF0030 Series: MOS FET Power AmplifierBảo BìnhNo ratings yet
- MC145190FDocument25 pagesMC145190FBảo BìnhNo ratings yet
- Acom SchematicDocument1 pageAcom SchematicBảo Bình100% (1)
- PM2111Document4 pagesPM2111Bảo BìnhNo ratings yet
- 12711883Document32 pages12711883Bảo BìnhNo ratings yet
- AN980 MotorolaDocument15 pagesAN980 MotorolaBảo BìnhNo ratings yet
- Baluns - Choosing The Correct Balun by Tom, W8JI ... - DX Engineering - 2Document22 pagesBaluns - Choosing The Correct Balun by Tom, W8JI ... - DX Engineering - 2Bảo BìnhNo ratings yet
- A63 Sma63Document3 pagesA63 Sma63Bảo BìnhNo ratings yet
- 100w Mosfet-Power-Amplifier SCH PDFDocument9 pages100w Mosfet-Power-Amplifier SCH PDFBảo BìnhNo ratings yet
- Transformers How They Measure ThemDocument16 pagesTransformers How They Measure ThemAnonymous 0wJgmKNo ratings yet
- cd4093bc 3 PDFDocument8 pagescd4093bc 3 PDFBảo BìnhNo ratings yet
- ICE User Guide - 001-44612 PDFDocument22 pagesICE User Guide - 001-44612 PDFBảo BìnhNo ratings yet
- Tesla Bm240 Frekvencia ModulatorDocument8 pagesTesla Bm240 Frekvencia ModulatorBảo BìnhNo ratings yet
- Underhill Lewis 1973 2Document2 pagesUnderhill Lewis 1973 2Bảo BìnhNo ratings yet
- Hello PdeDocument3 pagesHello PdeBảo Bình100% (1)
- Small Signal RF-VHF-UHF TransistorDocument1 pageSmall Signal RF-VHF-UHF TransistorBảo BìnhNo ratings yet
- Si4721 PropertiesDocument10 pagesSi4721 PropertiesBảo BìnhNo ratings yet
- AN1705Document12 pagesAN1705Nikhil DixitNo ratings yet
- Motorola GM Series ControllerDocument26 pagesMotorola GM Series ControllerBảo Bình100% (1)
- ADC Port CCS Compiler - PpsDocument5 pagesADC Port CCS Compiler - PpsBảo Bình100% (1)
- 5 1smsig MSG PDFDocument43 pages5 1smsig MSG PDFBảo BìnhNo ratings yet
- United States Patent: Smyth Et Al. (45) Date of Patent: Feb. 24, 2004Document7 pagesUnited States Patent: Smyth Et Al. (45) Date of Patent: Feb. 24, 2004Bảo BìnhNo ratings yet
- S Parameter BasicsDocument20 pagesS Parameter BasicsMihailNo ratings yet
- Video 17 PDFDocument5 pagesVideo 17 PDFBảo BìnhNo ratings yet
- Amplifiers Module 01Document26 pagesAmplifiers Module 01Sathish BalaNo ratings yet
- Data Sheet: Stereo Cassette Head Preamplifier and EqualizerDocument17 pagesData Sheet: Stereo Cassette Head Preamplifier and EqualizerLuciana OhiraNo ratings yet
- ADC0808Document15 pagesADC0808Ketan SalviNo ratings yet
- MAX1232 Microprocessor Monitor: General Description FeaturesDocument8 pagesMAX1232 Microprocessor Monitor: General Description FeaturesFatih YILDIRIMNo ratings yet
- Service Manual: R-Series LCD MonitorDocument31 pagesService Manual: R-Series LCD MonitorPedro MarinNo ratings yet
- Ir 2151Document6 pagesIr 2151RintheGreatNo ratings yet
- Hawk 800 Instructions V1.5bDocument22 pagesHawk 800 Instructions V1.5bKen KlocekNo ratings yet
- DLD Lab 3Document4 pagesDLD Lab 3گيدوڙو ماڇيNo ratings yet
- Attend Connectors Main Catalogue PDFDocument12 pagesAttend Connectors Main Catalogue PDFpritpal singhNo ratings yet
- CD4027BC Dual J-K Master/Slave Flip-Flop With Set and Reset: General Description FeaturesDocument6 pagesCD4027BC Dual J-K Master/Slave Flip-Flop With Set and Reset: General Description FeaturesGoodLookingPirateNo ratings yet
- Suggested Magnetics: General DescriptionDocument10 pagesSuggested Magnetics: General DescriptionLarbi BelazizNo ratings yet
- RDocument32 pagesRmonpecoNo ratings yet
- Digital Fundamentals: FloydDocument39 pagesDigital Fundamentals: FloydS Awais AhmedNo ratings yet
- Watchman AlarmDocument2 pagesWatchman AlarmRoshan ShanmughanNo ratings yet
- Eeprom 29c040Document13 pagesEeprom 29c040api-3710567No ratings yet
- 4538B Data SheetDocument10 pages4538B Data SheetpandaypiraNo ratings yet
- Component Library Master Training - CRDocument270 pagesComponent Library Master Training - CRNicu Gee100% (3)
- How To Program 12F629 With Willem ProgrammerDocument15 pagesHow To Program 12F629 With Willem ProgrammerCarlos ChirinosNo ratings yet
- Arduino 4-Digit 0.5" 7 Segment Display Module: Arduino Compatible Hardware ContainsDocument4 pagesArduino 4-Digit 0.5" 7 Segment Display Module: Arduino Compatible Hardware ContainsNguyen Phuoc HoNo ratings yet
- Digital ConceptsDocument28 pagesDigital ConceptsRossa Triastika Fajariah034No ratings yet
- CD 4528Document9 pagesCD 4528L30N1No ratings yet
- TC1044S Charge Pump DC-TO-DC Voltage Converter: Features General DescriptionDocument11 pagesTC1044S Charge Pump DC-TO-DC Voltage Converter: Features General DescriptionAlex Lorz BalboaNo ratings yet
- Datasheet Digital 74hcDocument10 pagesDatasheet Digital 74hcСтанислав ИвановNo ratings yet
- Data Sheet: HCPL-3120/J312 HCNW3120Document27 pagesData Sheet: HCPL-3120/J312 HCNW3120onafetsNo ratings yet
- DS1320Document13 pagesDS1320Annelise Grottker de OliveiraNo ratings yet
- 2.7V 4-Channel/8-Channel 12-Bit A/D Converters With SPI Serial InterfaceDocument41 pages2.7V 4-Channel/8-Channel 12-Bit A/D Converters With SPI Serial InterfacecutoNo ratings yet
- Chapter - 1 VlsiDocument15 pagesChapter - 1 VlsiMuhammedyasar ShaikhNo ratings yet
- 27C512Document12 pages27C512technicalavrNo ratings yet
- Ina 129Document29 pagesIna 129Victor Hugo OrtizNo ratings yet
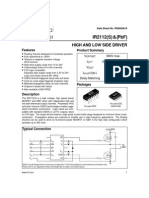
- Ir2112 (S) & (PBF) : High and Low Side DriverDocument17 pagesIr2112 (S) & (PBF) : High and Low Side DriverMugahed DammagNo ratings yet
- Agm 2406-801Document24 pagesAgm 2406-801rogeriocorreaNo ratings yet