You might also like
- Jt20 ManualDocument201 pagesJt20 Manualweider11No ratings yet
- Trend Graphs - Sample AnswerDocument4 pagesTrend Graphs - Sample AnswerannieannsNo ratings yet
- Sine and Cosine Exam QuestionsDocument8 pagesSine and Cosine Exam QuestionsGamer Shabs100% (1)
- Technology Digital LiteracyDocument7 pagesTechnology Digital LiteracyCharlesVincentGalvadoresCarbonell100% (1)
- Mid Term Business Economy - Ayustina GiustiDocument9 pagesMid Term Business Economy - Ayustina GiustiAyustina Giusti100% (1)
- Boat DesignDocument8 pagesBoat DesignporkovanNo ratings yet
- A First Course in Elementary Differential EquationsDocument213 pagesA First Course in Elementary Differential Equationsjdsparagas100% (1)
- 797B Commissioning Guidebook 07 (Procesos)Document65 pages797B Commissioning Guidebook 07 (Procesos)wilmerNo ratings yet
- RPH Sains DLP Y3 2018Document29 pagesRPH Sains DLP Y3 2018Sukhveer Kaur0% (1)
- Numerical Methods For ODE and PDEDocument114 pagesNumerical Methods For ODE and PDERaman DeepNo ratings yet
- XDM-300 IMM ETSI B00 8.2.1-8.2.2 enDocument386 pagesXDM-300 IMM ETSI B00 8.2.1-8.2.2 enHipolitomvn100% (1)
- PQ of Vial Washer Ensures Removal of ContaminantsDocument25 pagesPQ of Vial Washer Ensures Removal of ContaminantsJuan DanielNo ratings yet
- ch3 - AODDocument154 pagesch3 - AODAnonymous OrhjVLXO5sNo ratings yet
- Notes-2nd Order ODE Pt1Document37 pagesNotes-2nd Order ODE Pt1lebsework1801No ratings yet
- On Free Mechanical VibrationsDocument41 pagesOn Free Mechanical VibrationsPuneet BahriNo ratings yet
- Numerical Solution of Ordinary Differential EquationsDocument9 pagesNumerical Solution of Ordinary Differential EquationsShimaa BarakatNo ratings yet
- ODEs with Variable CoefficientsDocument2 pagesODEs with Variable CoefficientsDAVIDNo ratings yet
- OdeDocument73 pagesOdeVamsi Krishna SarmaNo ratings yet
- 1 s2.0 S0377042708001568 MainDocument13 pages1 s2.0 S0377042708001568 MainSaint-CyrNo ratings yet
- Lecture 1Document84 pagesLecture 1NadipalliSrirajNo ratings yet
- CH 3.1: Second Order Linear Homogeneous Equations With Constant CoefficientsDocument31 pagesCH 3.1: Second Order Linear Homogeneous Equations With Constant CoefficientsFriska Rianty AmeliaNo ratings yet
- TPDE-Boundary Value ProDocument48 pagesTPDE-Boundary Value ProMOHAMED FAIZALNo ratings yet
- Differential Equations. I.: Basic ConceptsDocument4 pagesDifferential Equations. I.: Basic ConceptsninoNo ratings yet
- 440 Ordinary Differential Equations Chapter 8Document11 pages440 Ordinary Differential Equations Chapter 8Anonymous ZuOYBjgPNo ratings yet
- Notes-2nd Order ODE pt1Document33 pagesNotes-2nd Order ODE pt1Kenya LevyNo ratings yet
- Heaviside Operational Calculus by J R CarsonDocument26 pagesHeaviside Operational Calculus by J R CarsonGeraldo Carvalho Brito Jr.No ratings yet
- ClaudiaDocument178 pagesClaudiaemanueluntesuNo ratings yet
- Winitzki - Derivation of WKB ApproximationDocument2 pagesWinitzki - Derivation of WKB ApproximationwinitzkiNo ratings yet
- Pure Soliton Solutions of Some Nonlinear Partial Differential EquationsDocument8 pagesPure Soliton Solutions of Some Nonlinear Partial Differential EquationsHamid MojiryNo ratings yet
- (Ozgur) - Lecture 4 (2.4)Document7 pages(Ozgur) - Lecture 4 (2.4)Orkun AkyolNo ratings yet
- CH 8 AaaaaaaaaaaaaaaaaaaaaaaaaaDocument42 pagesCH 8 AaaaaaaaaaaaaaaaaaaaaaaaaabbteenagerNo ratings yet
- Solve Systems of Differential EquationsDocument225 pagesSolve Systems of Differential EquationsInspire LoNo ratings yet
- Signals and Linear Systems Described by Differential and Difference EquationsDocument9 pagesSignals and Linear Systems Described by Differential and Difference EquationsMozammel HossainNo ratings yet
- Nonlinear Third Order Differential Equations Limit-Point and Limit-Circle ClassificationDocument14 pagesNonlinear Third Order Differential Equations Limit-Point and Limit-Circle ClassificationAntonio Torres PeñaNo ratings yet
- Unsteady Laminar Flow in A TubeDocument9 pagesUnsteady Laminar Flow in A TubeAdølfo BtzNo ratings yet
- Solution To ODEDocument15 pagesSolution To ODEAmar RaichurNo ratings yet
- A First Course in Elementary Differential EquationsDocument241 pagesA First Course in Elementary Differential EquationsMaruf AbdallaNo ratings yet
- CH04Document17 pagesCH04GD AminNo ratings yet
- Differential Equations: Eivind EriksenDocument50 pagesDifferential Equations: Eivind EriksenHussam AgabNo ratings yet
- Matrix 2Document37 pagesMatrix 2JordanSykesNo ratings yet
- SCI111 Differen (Ce) (Tial) EqnsDocument44 pagesSCI111 Differen (Ce) (Tial) EqnsTaco ChristopherNo ratings yet
- Differential Transform Method For Solving Engineering and Mathematical Problems Version 5 PDFDocument20 pagesDifferential Transform Method For Solving Engineering and Mathematical Problems Version 5 PDFGLANo ratings yet
- Linear Differential Equations With Variable Coefficients: Fundamental Theorem of The Solving KernelDocument20 pagesLinear Differential Equations With Variable Coefficients: Fundamental Theorem of The Solving KernelJay acebedoNo ratings yet
- Analytical Solutions To Two-Dimensional D@usion Type Problems in H-Regular GeometriesDocument14 pagesAnalytical Solutions To Two-Dimensional D@usion Type Problems in H-Regular GeometriesflausenNo ratings yet
- Applications of Series SolitionDocument7 pagesApplications of Series SolitionGame showNo ratings yet
- Math 251 First Exam SolutionsDocument10 pagesMath 251 First Exam SolutionshungNo ratings yet
- 4 2-NotesDocument3 pages4 2-NotesJiggy Lawrence BathanNo ratings yet
- Thermal (TE-411,412,413,414,511)Document25 pagesThermal (TE-411,412,413,414,511)nved01No ratings yet
- On Solution of Sylvester Equation PDFDocument3 pagesOn Solution of Sylvester Equation PDFAzhar MahmoodNo ratings yet
- ODES: Ordinary Differential EquationsDocument7 pagesODES: Ordinary Differential EquationsYogi Firman AndikaNo ratings yet
- The Unique Symmetric Positive Solutions For Nonlinear Fourth Order Arbitrary Two-Point Boundary Value Problems: A Fixed Point Theory ApproachDocument19 pagesThe Unique Symmetric Positive Solutions For Nonlinear Fourth Order Arbitrary Two-Point Boundary Value Problems: A Fixed Point Theory ApproachMd. AsaduzzamanNo ratings yet
- Existence and Uniqueness of Solutions, Differences Between Linear and Nonlinear Equations (Section 2.4)Document2 pagesExistence and Uniqueness of Solutions, Differences Between Linear and Nonlinear Equations (Section 2.4)ybNo ratings yet
- Articulo Periodic Oscillations of The Relativistic Pendulum With FrictionDocument2 pagesArticulo Periodic Oscillations of The Relativistic Pendulum With FrictionHumberto ValadezNo ratings yet
- Mathematical Proceedings of The Cambridge Philosophical SocietyDocument13 pagesMathematical Proceedings of The Cambridge Philosophical SocietyHenrique CastroNo ratings yet
- Difference EquationsDocument9 pagesDifference EquationsAndersonNo ratings yet
- CH 2.4: Differences Between Linear and Nonlinear EquationsDocument15 pagesCH 2.4: Differences Between Linear and Nonlinear EquationsMario SihombingNo ratings yet
- Chapter 20Document12 pagesChapter 20Ariana Ribeiro LameirinhasNo ratings yet
- Lecture 6. Second-Order Linear EquationsDocument5 pagesLecture 6. Second-Order Linear EquationsParatus AlcántaraNo ratings yet
- Stabilization of Euler-Bernoulli Plate Equation With Variable Coefficients by Nonlinear Boundary FeedbackDocument21 pagesStabilization of Euler-Bernoulli Plate Equation With Variable Coefficients by Nonlinear Boundary FeedbackAndrew ThomasNo ratings yet
- Exact Solutions of Nonlinear (2 + 1) - Dimension Nonlinear Dispersive Long Wave and Coupled Boiti-Leon-Pempinelli Equations by Using The Modified Simple Equation MethodDocument7 pagesExact Solutions of Nonlinear (2 + 1) - Dimension Nonlinear Dispersive Long Wave and Coupled Boiti-Leon-Pempinelli Equations by Using The Modified Simple Equation MethodTI Journals PublishingNo ratings yet
- Implicit Finite-Difference Solutions of The Enthalpy Formulation of Stefan ProblemsDocument14 pagesImplicit Finite-Difference Solutions of The Enthalpy Formulation of Stefan ProblemsAli EhsanNo ratings yet
- Abstract Evolution Equations of Parabolic Type in Banach and Hilbert Spaces, Tosio KatoDocument34 pagesAbstract Evolution Equations of Parabolic Type in Banach and Hilbert Spaces, Tosio KatoFis MatNo ratings yet
- Solution Using Separation of VariablesDocument12 pagesSolution Using Separation of Variablespeter.gomes20087216No ratings yet
- ODE for Engineers: Lecture NotesDocument133 pagesODE for Engineers: Lecture NotesbabycatkimNo ratings yet
- Central Nuclear A PresionDocument1 pageCentral Nuclear A PresionChristian Camilo Crisblack CastañedaNo ratings yet
- STA402A Darlington PNP Absolute Maximum RatingsDocument1 pageSTA402A Darlington PNP Absolute Maximum RatingsChristian Camilo Crisblack CastañedaNo ratings yet
- Verb Patterns 1Document1 pageVerb Patterns 1Christian Camilo Crisblack CastañedaNo ratings yet
- First Conditional 2Document1 pageFirst Conditional 2Christian Camilo Crisblack CastañedaNo ratings yet
- First Conditional 1Document1 pageFirst Conditional 1Christian Camilo Crisblack CastañedaNo ratings yet
- STA402A Darlington PNP Absolute Maximum RatingsDocument1 pageSTA402A Darlington PNP Absolute Maximum RatingsChristian Camilo Crisblack CastañedaNo ratings yet
- First Conditional 1Document1 pageFirst Conditional 1Christian Camilo Crisblack CastañedaNo ratings yet
- First Conditional 1Document1 pageFirst Conditional 1Christian Camilo Crisblack CastañedaNo ratings yet
- How To Retract BPS Data Back To R3 When There Is No Standard RetractorDocument3 pagesHow To Retract BPS Data Back To R3 When There Is No Standard Retractorraphavega2010No ratings yet
- 10 Compactness in Function Spaces: Ascoli-Arzel A TheoremDocument5 pages10 Compactness in Function Spaces: Ascoli-Arzel A TheoremronalduckNo ratings yet
- 45 - Altivar 61 Plus Variable Speed DrivesDocument130 pages45 - Altivar 61 Plus Variable Speed Drivesabdul aziz alfiNo ratings yet
- Lehman BrothersDocument10 pagesLehman BrothersJaikishin RuprajNo ratings yet
- jk2 JAVADocument57 pagesjk2 JAVAAndi FadhillahNo ratings yet
- OWASP Dependency-Check Plugin: DescriptionDocument10 pagesOWASP Dependency-Check Plugin: DescriptionFelipe BarbosaNo ratings yet
- Active Sound Gateway - Installation - EngDocument9 pagesActive Sound Gateway - Installation - EngDanut TrifNo ratings yet
- Course Code: Hrm353 L1Document26 pagesCourse Code: Hrm353 L1Jaskiran KaurNo ratings yet
- Youtube SrsDocument23 pagesYoutube Srsabhinandan PandeyNo ratings yet
- Hydroponics SummaryDocument4 pagesHydroponics SummaryJose NovoaNo ratings yet
- European Heart Journal Supplements Pathophysiology ArticleDocument8 pagesEuropean Heart Journal Supplements Pathophysiology Articleal jaynNo ratings yet
- Television: Operating InstructionsDocument40 pagesTelevision: Operating InstructionsNitin AgrawalNo ratings yet
- PHCDocument1 pagePHCsinh24X7No ratings yet
- Mechanical Function of The HeartDocument28 pagesMechanical Function of The HeartKarmilahNNo ratings yet
- Commu I ReviewedDocument45 pagesCommu I ReviewedCabdirisaaq CabdisalanNo ratings yet
- Effects of Zero Moment of Truth On Consumer Behavior For FMCGDocument14 pagesEffects of Zero Moment of Truth On Consumer Behavior For FMCGBoogii EnkhboldNo ratings yet
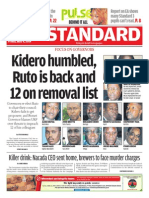
- The Standard 09.05.2014Document96 pagesThe Standard 09.05.2014Zachary Monroe100% (1)
- Oxyacetylene Welding (OAW)Document26 pagesOxyacetylene Welding (OAW)athyrahNo ratings yet
- Mass ELA Releases ORQs Grade 8Document24 pagesMass ELA Releases ORQs Grade 8scmsliteracyNo ratings yet
- Ground Floor 40X80 Option-1Document1 pageGround Floor 40X80 Option-1Ashish SrivastavaNo ratings yet