You might also like
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalFrom EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalRating: 5 out of 5 stars5/5 (4)
- Folleto Tecsup PDFDocument8 pagesFolleto Tecsup PDFlmendizabalNo ratings yet
- hgonzalez,+Vol12N1 2018 16+de+julio+de+2019-66-73Document8 pageshgonzalez,+Vol12N1 2018 16+de+julio+de+2019-66-73william alexander laverde chaparroNo ratings yet
- Maestria en Ingenieria Mecatronica Cuvalles SNPDocument5 pagesMaestria en Ingenieria Mecatronica Cuvalles SNPlenin.martinez.gomezNo ratings yet
- Maestria en Ingenieria Mecatronica-A Distancia-Cu VallesDocument5 pagesMaestria en Ingenieria Mecatronica-A Distancia-Cu VallesJesús FloresNo ratings yet
- Informe de Programadores de Sistemas de Control e InstrumentaciónDocument12 pagesInforme de Programadores de Sistemas de Control e InstrumentaciónSINCHE ESTRADA, JosueNo ratings yet
- MECATRONICADocument22 pagesMECATRONICAJose LUIS Mendez GONzalezNo ratings yet
- Daii Uc 10112022Document8 pagesDaii Uc 10112022nelsonNo ratings yet
- Ficha MecatronicaDocument5 pagesFicha MecatronicaADAN FRANCISCO GONZALEZ GOMEZNo ratings yet
- Paper Proyecto Sistemas de ControlDocument9 pagesPaper Proyecto Sistemas de ControlKevin EstradaNo ratings yet
- Propuesta Proyecto Sistemas de ControlDocument8 pagesPropuesta Proyecto Sistemas de ControlKevin EstradaNo ratings yet
- MECATRONICADocument22 pagesMECATRONICArobertoNo ratings yet
- Mecatronica 1Document22 pagesMecatronica 1Cesar VasquesNo ratings yet
- Ejemplo AnteproyectoDocument25 pagesEjemplo AnteproyectoMaicol Madero PinzónNo ratings yet
- FluidSim PLCDocument168 pagesFluidSim PLCANESODA100% (4)
- 42V Guía Didáctica TIDA 18-19 - Rev1Document8 pages42V Guía Didáctica TIDA 18-19 - Rev1Rober PedronNo ratings yet
- Instrumentacion y Control IndustrialDocument6 pagesInstrumentacion y Control IndustrialPedro Tapia JimenezNo ratings yet
- S4 Contenido Concm1301Document19 pagesS4 Contenido Concm1301Maikol Andres Cerda RojasNo ratings yet
- SILABO - Capcha BuizaDocument6 pagesSILABO - Capcha BuizaLuis Alonso Dipaz ZeaNo ratings yet
- Guia - Lab - Control IIDocument7 pagesGuia - Lab - Control IICARLOS ALBERTO BAICUENo ratings yet
- Automatas ProgramablesDocument11 pagesAutomatas ProgramablesLuis Angel CheNo ratings yet
- Fase 3 - Telecontrol - Grupo8Document24 pagesFase 3 - Telecontrol - Grupo8sary mercado pauttNo ratings yet
- Sistemas de Control Electronico de PotenciaDocument8 pagesSistemas de Control Electronico de PotencialuisandradeNo ratings yet
- If Del Aguila Vela FieeDocument100 pagesIf Del Aguila Vela FieeDorian HidalgoNo ratings yet
- Controladores Logicos ProgramablesDocument8 pagesControladores Logicos ProgramablesJesus Ivan MaciasNo ratings yet
- Brochure 2023Document11 pagesBrochure 2023kollberNo ratings yet
- Electronica AutomotrizDocument2 pagesElectronica Automotrizanthony ramos caceresNo ratings yet
- Proyecto Final ModeladoDocument4 pagesProyecto Final ModeladoedwcaranNo ratings yet
- Perfil Profesional Ingeniero Manteniemiento Industrial CitecDocument7 pagesPerfil Profesional Ingeniero Manteniemiento Industrial CitecTed William Reinstang MangonezNo ratings yet
- S4 Contenido Concm1301Document19 pagesS4 Contenido Concm1301mauricio mamaniNo ratings yet
- Anexo 20Document18 pagesAnexo 20Freddy OsornoNo ratings yet
- Especialidad Automatizacion y Control ImieiemDocument122 pagesEspecialidad Automatizacion y Control Imieiemcesar antonio arriaga carrizalesNo ratings yet
- MOTORES ELECTRICOS - Programa - IE037Document5 pagesMOTORES ELECTRICOS - Programa - IE037Luis Enrique Ruiz FernándezNo ratings yet
- Automatización Industrial Con PLCDocument4 pagesAutomatización Industrial Con PLCCandidoMolanes0% (1)
- Contenido de PLCDocument19 pagesContenido de PLCEmilio ClavelNo ratings yet
- EGC MecatronicaDocument23 pagesEGC MecatronicaOswald muñozNo ratings yet
- TESIS - AnteproyectoDocument6 pagesTESIS - AnteproyectoANGEL DANILO TOAPANTA SANDOVALNo ratings yet
- Técnico en MecatrónicaDocument15 pagesTécnico en MecatrónicaxlegionxNo ratings yet
- Sistemas Integrados de ManufacturaDocument10 pagesSistemas Integrados de ManufacturaAngel AlbertoNo ratings yet
- Ngeniería MecatrónicaDocument4 pagesNgeniería MecatrónicaYhoel GutierrezNo ratings yet
- Sistemas MecatronicosDocument5 pagesSistemas MecatronicosCarlos Sulca NeiraNo ratings yet
- Ejercicios PDFDocument168 pagesEjercicios PDFEder Solis100% (2)
- Ficha MecatronicaDocument5 pagesFicha MecatronicaJavier VillanuevaNo ratings yet
- Curriculum M0944Document3 pagesCurriculum M0944tonix314No ratings yet
- Silabo Controles Eléctricos y AutomatizaciónDocument12 pagesSilabo Controles Eléctricos y AutomatizaciónRonald Imer Bances GarciaNo ratings yet
- ¿ Que Es Un Sistema Automatizado ?: Detectores y Captadores Accionadores y PreaccionadoresDocument29 pages¿ Que Es Un Sistema Automatizado ?: Detectores y Captadores Accionadores y PreaccionadoresAaron David Del CidNo ratings yet
- V17n32a10 PDFDocument13 pagesV17n32a10 PDFFranco SalinasNo ratings yet
- ML611 2015 IiDocument6 pagesML611 2015 Iircc_m4No ratings yet
- Maestria Electronica y AutomatizacionDocument24 pagesMaestria Electronica y AutomatizacionBorisNo ratings yet
- Control Y Automatización de Procesos Industriales Con PLCDocument9 pagesControl Y Automatización de Procesos Industriales Con PLCSteevens GarridoNo ratings yet
- Automatizacion Industrial Con PLCDocument4 pagesAutomatizacion Industrial Con PLCManuel JesusNo ratings yet
- Control Logico ProgramableDocument124 pagesControl Logico ProgramableAngel Xavier GarciaNo ratings yet
- Desarrollo de Software Scada para Mantenimiento Preventivo de Motores AsincronosDocument46 pagesDesarrollo de Software Scada para Mantenimiento Preventivo de Motores AsincronosCarlos CubasNo ratings yet
- Diseño Mecatrónico Fase III - Primer Avance de PrototipoDocument18 pagesDiseño Mecatrónico Fase III - Primer Avance de PrototipoLuucy AlvaareezNo ratings yet
- Ferri - Implementación de Algoritmos de Control Avanzados MPC en PLCs IndustrialesDocument81 pagesFerri - Implementación de Algoritmos de Control Avanzados MPC en PLCs IndustrialesJorge Antonio Ramírez MedinaNo ratings yet
- LADDERDocument50 pagesLADDERPedro Flores SánchezNo ratings yet
- Clase1 - 1introducciónDocument15 pagesClase1 - 1introducciónjose luis galindo ortizNo ratings yet
- S1 - Introduccion A La Electronica DigitalDocument36 pagesS1 - Introduccion A La Electronica DigitalLeonardo ParionaNo ratings yet
- Proyecto Banda Transportadora Motor DCDocument39 pagesProyecto Banda Transportadora Motor DCEDUARDO XAVIER ROMERO TORONo ratings yet
- Examen Bimestral de FisicaDocument7 pagesExamen Bimestral de FisicaAnibal Raynol Medrano ValeraNo ratings yet
- Rediseño de La Red de Voz, Datos y VideoDocument298 pagesRediseño de La Red de Voz, Datos y VideoAnibal Raynol Medrano ValeraNo ratings yet
- Sistemas de NumeraciónDocument2 pagesSistemas de NumeraciónAnibal Raynol Medrano ValeraNo ratings yet
- FuncionesDocument10 pagesFuncionesHéctor QuiñonezNo ratings yet
- Conceptos Fundamentales de Subestaciones EléctricasDocument57 pagesConceptos Fundamentales de Subestaciones EléctricasAngel De Jesus Olvera Barrera100% (1)
- Módulo 2. Base de Datos y Modelo RelacionalDocument68 pagesMódulo 2. Base de Datos y Modelo RelacionalMario SavedraNo ratings yet
- Arqueología de La Idea de DesarrolloDocument28 pagesArqueología de La Idea de DesarrolloAlfredo Vanoye MotaNo ratings yet
- Resumen de Estudio - IEEE830Document7 pagesResumen de Estudio - IEEE830SalvadorGonzalezNo ratings yet
- 2023 Tracker Ficha Tecnica v3Document1 page2023 Tracker Ficha Tecnica v3Gerardo ArenasNo ratings yet
- Formato Hoja de Vida de EquiposDocument4 pagesFormato Hoja de Vida de EquiposJhonEduardMachadoNo ratings yet
- 2da Entrega Vissani MarceloDocument46 pages2da Entrega Vissani MarceloMarcelo VissaniNo ratings yet
- Potencia TrifásicaDocument11 pagesPotencia TrifásicaEnrique MartínezNo ratings yet
- Gestión de Desechos PeligrososDocument14 pagesGestión de Desechos PeligrososDanny VcNo ratings yet
- Capacidades y Especificaciones de Aceites Equipos KomatsuDocument2 pagesCapacidades y Especificaciones de Aceites Equipos KomatsuEdin Raul Yalle RafaelNo ratings yet
- Firma OmarDocument2 pagesFirma OmarpiaNo ratings yet
- Proceso de ComunicaciónDocument8 pagesProceso de ComunicaciónAlejandro Martinez Bautista50% (2)
- Especificaciones de RequerimientoDocument6 pagesEspecificaciones de RequerimientoCaliksNo ratings yet
- Lista Chequeo Recursos AA4 EV2Document2 pagesLista Chequeo Recursos AA4 EV2JanethMendietaMuñoz100% (1)
- TDR Convocatoria para Formación de Gestores UniversitariosDocument6 pagesTDR Convocatoria para Formación de Gestores UniversitariosAPRENDICES SENANo ratings yet
- II.a) - Metodología Av - ManantialesDocument45 pagesII.a) - Metodología Av - ManantialesCarlos RivasNo ratings yet
- Características de Los Centros de CómputoDocument21 pagesCaracterísticas de Los Centros de CómputoBaylover RomeroNo ratings yet
- Actividad 1 - Exp. 4 - EPT - 4° Grado - ACGRDocument7 pagesActividad 1 - Exp. 4 - EPT - 4° Grado - ACGRANITA CECILIA GIL RABANALNo ratings yet
- Cómo Probar El Sensor TPSDocument6 pagesCómo Probar El Sensor TPScirino72No ratings yet
- Instructivo General de Acceso A La Plataforma Moodle - Facultad de Medicina de La UNAMDocument7 pagesInstructivo General de Acceso A La Plataforma Moodle - Facultad de Medicina de La UNAMOscar David GutierrezNo ratings yet
- El Vídeo Proporciona Una Manera Eficaz para Ayudarle A Demostrar El Punto NUMERO 5Document1 pageEl Vídeo Proporciona Una Manera Eficaz para Ayudarle A Demostrar El Punto NUMERO 5Aguilar RaulNo ratings yet
- Mapa Conceptual Control de InventariosDocument1 pageMapa Conceptual Control de InventariosNICOLAS ALEJANDRO SUAREZ LOAIZANo ratings yet
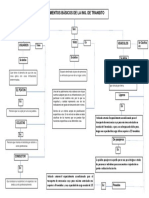
- Mapa Conceptual Ing TransitoDocument1 pageMapa Conceptual Ing TransitoDario Canul Cupul100% (2)
- Bases Concurso Nacional de Emprendimiento Escolar Impacto EmprendedorDocument11 pagesBases Concurso Nacional de Emprendimiento Escolar Impacto EmprendedorMaría Loyda Aravena MoraNo ratings yet
- La Funcion Social de La Educacion, Investigacion y Desarrollo PDFDocument13 pagesLa Funcion Social de La Educacion, Investigacion y Desarrollo PDFCamilo JaterNo ratings yet
- Mantenimiento de Calderas Industriales PortafolioDocument4 pagesMantenimiento de Calderas Industriales PortafolioMarco RamosNo ratings yet
- Hoja VerificableDocument2 pagesHoja Verificableworkerk7100% (1)
- Tara de InvestigacionDocument4 pagesTara de Investigacionsusii_alopezNo ratings yet
- Historia de La Tecnologia MovilDocument3 pagesHistoria de La Tecnologia MovilGina AndrewsNo ratings yet
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressFrom EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressRating: 5 out of 5 stars5/5 (1)
- Influencia. La psicología de la persuasiónFrom EverandInfluencia. La psicología de la persuasiónRating: 4.5 out of 5 stars4.5/5 (14)
- Guía para la aplicación de ISO 9001 2015From EverandGuía para la aplicación de ISO 9001 2015Rating: 4 out of 5 stars4/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.From EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Rating: 4 out of 5 stars4/5 (51)
- 7 tendencias digitales que cambiarán el mundoFrom Everand7 tendencias digitales que cambiarán el mundoRating: 4.5 out of 5 stars4.5/5 (87)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaFrom EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaRating: 4.5 out of 5 stars4.5/5 (117)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroFrom EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroRating: 4 out of 5 stars4/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másFrom EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másRating: 2.5 out of 5 stars2.5/5 (3)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosFrom EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosRating: 4 out of 5 stars4/5 (16)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteFrom EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteRating: 1 out of 5 stars1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.From EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Rating: 5 out of 5 stars5/5 (1)
- Aprender HTML5, CSS3 y Javascript con 100 ejereciosFrom EverandAprender HTML5, CSS3 y Javascript con 100 ejereciosRating: 5 out of 5 stars5/5 (2)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesFrom EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesRating: 4.5 out of 5 stars4.5/5 (2)
- Radiocomunicaciones: Teoría y principiosFrom EverandRadiocomunicaciones: Teoría y principiosRating: 5 out of 5 stars5/5 (3)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenFrom EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenRating: 5 out of 5 stars5/5 (8)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanFrom EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanRating: 5 out of 5 stars5/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREFrom EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARERating: 4 out of 5 stars4/5 (13)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónFrom EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónRating: 2 out of 5 stars2/5 (1)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosFrom EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosRating: 4 out of 5 stars4/5 (1)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasFrom EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasNo ratings yet
- Scrum Las Estrategias del Juego: Es Póker, No AjedrezFrom EverandScrum Las Estrategias del Juego: Es Póker, No AjedrezRating: 5 out of 5 stars5/5 (1)
- Guía de aplicacion de la ISO 9001:2015From EverandGuía de aplicacion de la ISO 9001:2015Rating: 5 out of 5 stars5/5 (3)
- Ingeniería química. Soluciones a los problemas del tomo IFrom EverandIngeniería química. Soluciones a los problemas del tomo INo ratings yet
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialFrom EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialRating: 4.5 out of 5 stars4.5/5 (11)