You might also like
- Ericsson Radio Node Retu Troubleshooting GuideDocument10 pagesEricsson Radio Node Retu Troubleshooting Guiderifki nurazmi100% (4)
- Battery 3214-30Document43 pagesBattery 3214-30herrisutrisna100% (4)
- 2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualDocument95 pages2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualanbarasanNo ratings yet
- Getting Started PIC16F88 KitDocument7 pagesGetting Started PIC16F88 KitOkta SporNo ratings yet
- Ericsson RAN GSM TrainingDocument83 pagesEricsson RAN GSM TrainingMojo Crat100% (6)
- Apex Dumpo3Document22 pagesApex Dumpo3JGM Jaguś Goods MakerNo ratings yet
- Obstacle Avoidance With 4 Sonar SensorsDocument13 pagesObstacle Avoidance With 4 Sonar SensorsFranco PalumboNo ratings yet
- 68HC11 Polling and InterruptsDocument41 pages68HC11 Polling and InterruptsMehmet DemirNo ratings yet
- Obstacle Avoiding Robot Using ArduinoDocument10 pagesObstacle Avoiding Robot Using ArduinoSir MannyNo ratings yet
- BTFL Cli D145 FPV 20210324 014342Document25 pagesBTFL Cli D145 FPV 20210324 014342DzNo ratings yet
- Requirement Specification:: List of ComponentsDocument13 pagesRequirement Specification:: List of Componentsprem_dreams4uNo ratings yet
- Microcontroller Based Scada: Monitoring Station IndustryDocument12 pagesMicrocontroller Based Scada: Monitoring Station IndustrySelva GanapathyNo ratings yet
- Obstacle Avoiding Robot Using Arduino and Ultrasonic SensorDocument10 pagesObstacle Avoiding Robot Using Arduino and Ultrasonic SensorDwi Pranomo100% (3)
- Commands ENMDocument21 pagesCommands ENMlamiaNo ratings yet
- GSM Troubleshooting Ericsson PDFDocument83 pagesGSM Troubleshooting Ericsson PDFAlyxandre100% (1)
- VHDL PortfolioDocument31 pagesVHDL PortfolioRenita ಞ MangoNo ratings yet
- Week 04Document68 pagesWeek 04aroosa naheedNo ratings yet
- PIC16F628A ExperimentosDocument11 pagesPIC16F628A ExperimentosCesar Matos100% (2)
- Lampiran_04Document20 pagesLampiran_04naf2345No ratings yet
- Prepaid Energy Meter (AT89S52) : How To Program A New CardDocument51 pagesPrepaid Energy Meter (AT89S52) : How To Program A New CardAkash SinghalNo ratings yet
- (4.5.0 ZULU Beta) (DUMP ALL) BTFL - Cli - 20230916 - 172153Document27 pages(4.5.0 ZULU Beta) (DUMP ALL) BTFL - Cli - 20230916 - 172153Dan MultiNo ratings yet
- NANDDocument2 pagesNANDSergio RosalesNo ratings yet
- PIC Microcontrollers: Low-End ArchitecturesDocument46 pagesPIC Microcontrollers: Low-End Architecturesvivek2585No ratings yet
- Advanced RoutingDocument7 pagesAdvanced RoutingObi A AgusioboNo ratings yet
- The Ultrasonic SensorDocument14 pagesThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Beta95x 4.2.9Document20 pagesBeta95x 4.2.9Star interceptor FPVNo ratings yet
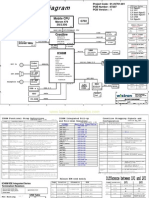
- Fujitsu-Siemens AMILO Li2727 Schematic DiagramDocument38 pagesFujitsu-Siemens AMILO Li2727 Schematic DiagramAhmed RedaNo ratings yet
- Lab 14Document10 pagesLab 14ubaidNo ratings yet
- دوك imu تءارق للاخ نم هنم دكاتلاو ليدعتلا لازم يبي لدعم scoopDocument33 pagesدوك imu تءارق للاخ نم هنم دكاتلاو ليدعتلا لازم يبي لدعم scoopDemon KrNo ratings yet
- PPTDocument37 pagesPPTEr Debasis Mishra0% (1)
- Traffic Control System Using 89C51: Project TitleDocument27 pagesTraffic Control System Using 89C51: Project TitleHafza GhafoorNo ratings yet
- Buzz CLI Dump v2.0Document22 pagesBuzz CLI Dump v2.0Alberto de Jesús Santos VillalobosNo ratings yet
- A Presentation ON Embedded Systems: Presented To: Presented byDocument26 pagesA Presentation ON Embedded Systems: Presented To: Presented byMahesh MuttheNo ratings yet
- 18 FXX 8Document18 pages18 FXX 8Francisco Manuel Pérez BértoloNo ratings yet
- 4 Bit CodeDocument4 pages4 Bit CodekemdemNo ratings yet
- PIC ECET410 Project Displays Voltage, Temperature, and Clock TimeDocument26 pagesPIC ECET410 Project Displays Voltage, Temperature, and Clock TimeOlav YeboahNo ratings yet
- Betaflight Config for XRACERF4Document20 pagesBetaflight Config for XRACERF4WernerNo ratings yet
- Automatic Room Light Controller With Visitor CounterDocument10 pagesAutomatic Room Light Controller With Visitor Counterpincess123No ratings yet
- Jammer022 AsmDocument6 pagesJammer022 AsmThanhha NguyenNo ratings yet
- 20EC3352 LAB EXPERIMENTS OldDocument47 pages20EC3352 LAB EXPERIMENTS Oldswathi kesanaNo ratings yet
- Detect button press using RB interrupt on PIC 16F877Document6 pagesDetect button press using RB interrupt on PIC 16F877Hliva ZoltanNo ratings yet
- Mk7a25p v06Document53 pagesMk7a25p v06אור מהללאל בן השםNo ratings yet
- EricssonDocument5 pagesEricssoneferrazbastos100% (1)
- F 818Document9 pagesF 818Eric YangNo ratings yet
- Packet Tracer Multiarea Ospf Exploration Physical Mode Part 2 SabordoDocument11 pagesPacket Tracer Multiarea Ospf Exploration Physical Mode Part 2 Sabordounlocky dayNo ratings yet
- Flashing A LEDDocument5 pagesFlashing A LEDMohammed AlnajjarNo ratings yet
- Embedded Lab Experiment 4 FinalDocument11 pagesEmbedded Lab Experiment 4 FinalShriram DhamdhereNo ratings yet
- Chapter 3 Lab 3-2Document16 pagesChapter 3 Lab 3-2Angel Mauricio Mercado AguirreNo ratings yet
- Genesys Logic, Inc.: GL650USB Usb 4 Port Hub ControllerDocument16 pagesGenesys Logic, Inc.: GL650USB Usb 4 Port Hub ControllerromenoNo ratings yet
- Collect Fault FinishDocument119 pagesCollect Fault Finish8051No ratings yet
- General Description: MK7A25PDocument53 pagesGeneral Description: MK7A25Pאור מהללאל בן השםNo ratings yet
- Lab Work - 08: Microprocessor Based SystemDocument5 pagesLab Work - 08: Microprocessor Based SystemMuhammadHadiNo ratings yet
- Eastern Mediterranean UniversityDocument24 pagesEastern Mediterranean UniversityMpu KatanaNo ratings yet
- AIM OF THE EXPERIMENT:-Binary To Decimal, Gray Code Apparatus RequiredDocument8 pagesAIM OF THE EXPERIMENT:-Binary To Decimal, Gray Code Apparatus RequiredSai KaneNo ratings yet
- MSP430 DatasheetDocument32 pagesMSP430 DatasheetFilipe GalizaNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Your EGiftCard $5 - 2Document1 pageYour EGiftCard $5 - 2Mr_IndiaNo ratings yet
- Your EGiftCard $5 - 5Document2 pagesYour EGiftCard $5 - 5Mr_IndiaNo ratings yet
- 9 28toastmasterDocument1 page9 28toastmasterMr_IndiaNo ratings yet
- Test Your Uvm Ovm SkillsDocument2 pagesTest Your Uvm Ovm SkillsMr_IndiaNo ratings yet
- Your EGiftCard $5 - 1Document2 pagesYour EGiftCard $5 - 1Mr_IndiaNo ratings yet
- Section 1 - Introduction To Binary TreesDocument27 pagesSection 1 - Introduction To Binary Treesblack Snow100% (1)
- Chobani Free YogurtDocument1 pageChobani Free YogurtMr_IndiaNo ratings yet
- CBP I94CorrectDocument2 pagesCBP I94CorrectMr_IndiaNo ratings yet
- Doulos Coverage Tips TricksDocument40 pagesDoulos Coverage Tips TricksНиколай ВътевNo ratings yet
- TSOP2Document10 pagesTSOP2Nagendra BabuNo ratings yet
- Shared-Memory Architectures: Adapted From A Lecture by Ian Watson, University of MachesterDocument33 pagesShared-Memory Architectures: Adapted From A Lecture by Ian Watson, University of MachesterMr_IndiaNo ratings yet
- Man Op Guide 1007Document31 pagesMan Op Guide 1007Mr_IndiaNo ratings yet
- TSOP2Document10 pagesTSOP2Nagendra BabuNo ratings yet
- Line Following Robot GuideDocument12 pagesLine Following Robot GuideMr_IndiaNo ratings yet
- VLSI System DesignDocument767 pagesVLSI System DesignMr_India100% (4)
- Vipedia-12 MPS01-MPS50Document3 pagesVipedia-12 MPS01-MPS50ranajithdkNo ratings yet
- CSC 111 - Introduction To Computing Lecture One: C. I Eke Eke - Ifeanyi @fulafia - Edu.ngDocument49 pagesCSC 111 - Introduction To Computing Lecture One: C. I Eke Eke - Ifeanyi @fulafia - Edu.ngLawalNo ratings yet
- ReferencesDocument3 pagesReferencesKUHENDRAN A/L RAVANDRANNo ratings yet
- Generator Excitation Control Systems & MethodsDocument5 pagesGenerator Excitation Control Systems & MethodsJohan GantivaNo ratings yet
- Electric Circuit Fundamentals: Essential QuestionDocument15 pagesElectric Circuit Fundamentals: Essential QuestionMOBILEE CANCERERNo ratings yet
- Philips LED 12836redb1 21 Watts 5 Watts 21w/5w Dois PolosDocument2 pagesPhilips LED 12836redb1 21 Watts 5 Watts 21w/5w Dois PolosExclusivo1No ratings yet
- Beko TV LCD 14-20 Chassis LCDocument33 pagesBeko TV LCD 14-20 Chassis LCwajkNo ratings yet
- Gps Final Year ProjectDocument52 pagesGps Final Year ProjectPramod Niraula100% (1)
- # Peavey Pv115 SpeakersDocument1 page# Peavey Pv115 SpeakersDaz MasonNo ratings yet
- RISHMaster 3410 - Digital Multifunctional InstrumentsDocument3 pagesRISHMaster 3410 - Digital Multifunctional InstrumentsAarif PatelNo ratings yet
- 1280-060 DatasheetDocument43 pages1280-060 DatasheetRamesh RautNo ratings yet
- Multi-Purpose Smoke DetectorDocument1 pageMulti-Purpose Smoke DetectorxainaliNo ratings yet
- Digital Logic Design Course Objectives and UnitsDocument2 pagesDigital Logic Design Course Objectives and UnitsRameshchandra K ECENo ratings yet
- Mps1000 ManualDocument46 pagesMps1000 ManualAnne NicoletaNo ratings yet
- Positive IsolationDocument10 pagesPositive IsolationArunava Basak0% (1)
- MC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648Document12 pagesMC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648catsoithahuong84No ratings yet
- Disassembly Inkjet 2007109185837Document2 pagesDisassembly Inkjet 2007109185837Oliver TabagNo ratings yet
- Meanwell SMPS CATLOGUE.Document1 pageMeanwell SMPS CATLOGUE.rajstarNo ratings yet
- Microwave Link Design - Nueva EcijaDocument79 pagesMicrowave Link Design - Nueva EcijaMark Vincent Fortaleza55% (11)
- Monopole & Dipole Antennas LabDocument8 pagesMonopole & Dipole Antennas LabSharjeel AsifNo ratings yet
- E3423 P5KPL-VMDocument94 pagesE3423 P5KPL-VMfreimannNo ratings yet
- L Series - Operating Manual.0.8Document55 pagesL Series - Operating Manual.0.8PaMe LiTaNo ratings yet
- CD2000 Drive ManualDocument106 pagesCD2000 Drive ManualAdvance Engineering ShoaibNo ratings yet
- Tom Lish: What Is A Dynamometer and How Does It Work?Document2 pagesTom Lish: What Is A Dynamometer and How Does It Work?Tiago AvilaNo ratings yet
- MasterFan SF360R ARGB CoolerMaster's 360mm Addressable RGB FanDocument2 pagesMasterFan SF360R ARGB CoolerMaster's 360mm Addressable RGB FanMohd Aris IbrahimNo ratings yet
- Elevator Disconnect RequirementsDocument10 pagesElevator Disconnect Requirementssuresh7234No ratings yet
- PSC WP Energising Ireland A Guide To Grid Code Compliance K.YumakDocument14 pagesPSC WP Energising Ireland A Guide To Grid Code Compliance K.Yumakp61466365No ratings yet
- Vec 1180 KDocument35 pagesVec 1180 Kyu3zaNo ratings yet