You might also like
- Curso de Reprogramacion de CentralitasDocument13 pagesCurso de Reprogramacion de CentralitasRomán Osvaldo Alemán GonzálezNo ratings yet
- VWDocument17 pagesVWJuanCarlosCastillo100% (2)
- Manual Uso RadioReset PionnerDocument2 pagesManual Uso RadioReset PionnerScot Electronica (Scot electronica)No ratings yet
- Manual Do Usuario ECU Test 3Document34 pagesManual Do Usuario ECU Test 3SamukaOliveira100% (1)
- 2.2.1 FlexrayDocument40 pages2.2.1 Flexraydiego.bravo.retamal.16No ratings yet
- CAN FlexrayDocument17 pagesCAN Flexrayhugosaldano50% (2)
- Diagnostico, Averias y Soluciones Del InmovilizadorDocument10 pagesDiagnostico, Averias y Soluciones Del InmovilizadorMAYKEL MATABAYNo ratings yet
- Copia de PRESEN1 PDFDocument78 pagesCopia de PRESEN1 PDFChristian Mas DNo ratings yet
- Tema 8 TransmisionesDocument17 pagesTema 8 TransmisionesChunguito AlexNo ratings yet
- Ecus Mod 1Document4 pagesEcus Mod 1Oswaldo AguilarNo ratings yet
- Ital Sciscioli 2014Document110 pagesItal Sciscioli 2014yorman padillaNo ratings yet
- Nuevas Arquitecturas CanDocument18 pagesNuevas Arquitecturas CanGuillermo NuñezNo ratings yet
- K TagDocument12 pagesK TagrobertoNo ratings yet
- Manual Multipexado ChryslerDocument23 pagesManual Multipexado ChryslerGabrielNo ratings yet
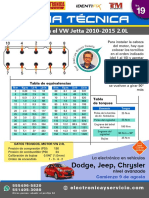
- Ficha EySer No. 19Document1 pageFicha EySer No. 19jairo duarteNo ratings yet
- Renault Ecu Tools XpoDocument11 pagesRenault Ecu Tools XpoJavi ChitoNo ratings yet
- Manual de Instrucciones OBDMAPDocument37 pagesManual de Instrucciones OBDMAPdanillocot100% (2)
- Diagnóstico básico circuitos eléctricos autos VWDocument15 pagesDiagnóstico básico circuitos eléctricos autos VWlors75100% (1)
- Seminario SlidesDocument46 pagesSeminario Slidesminombremio2100% (1)
- Alimentacion de Tension y Gestion de Energia - SPDocument124 pagesAlimentacion de Tension y Gestion de Energia - SPjimmy_burgos_11100% (2)
- Ficha Tecnica BMW 125ia Coupe (Automatico) 2013Document3 pagesFicha Tecnica BMW 125ia Coupe (Automatico) 2013pedro buenoNo ratings yet
- Sistema Can BusDocument29 pagesSistema Can BusDavid ParariNo ratings yet
- Mediciones en Sistemas Automotrices. Impartido Por - Ing. Antonio Villegas Casas PDFDocument74 pagesMediciones en Sistemas Automotrices. Impartido Por - Ing. Antonio Villegas Casas PDFJulio César Turpo BustinzaNo ratings yet
- Sensor de presión MAP Chevrolet Matiz prueba titulo optimizadoDocument1 pageSensor de presión MAP Chevrolet Matiz prueba titulo optimizadoEDSONNo ratings yet
- Peugeot 208 107928Document332 pagesPeugeot 208 107928Claudio DiazNo ratings yet
- PdcHyundai PDFDocument71 pagesPdcHyundai PDFCainLucasNo ratings yet
- Prueba bobina ignición Chevrolet Aveo multímetroDocument1 pagePrueba bobina ignición Chevrolet Aveo multímetroAlanisNo ratings yet
- Sistema Bus y DiagnosticoDocument16 pagesSistema Bus y DiagnosticoPst Pst Pst100% (1)
- Curso Chip de Potenciación 2022 (Septiembre, Octubre)Document7 pagesCurso Chip de Potenciación 2022 (Septiembre, Octubre)diego dambrosioNo ratings yet
- Guia Laboratorio Analisis de DTCDocument22 pagesGuia Laboratorio Analisis de DTCDiego JopiaNo ratings yet
- Manual Mce 2 ParteDocument93 pagesManual Mce 2 Partemarco davalos100% (1)
- Curso Common Rail Diesel 2017Document117 pagesCurso Common Rail Diesel 2017memo velascoNo ratings yet
- UD 06 Estructuras VehículoDocument60 pagesUD 06 Estructuras VehículoAlvar SanchoNo ratings yet
- Funcion Star StopDocument10 pagesFuncion Star StopfernandosanchezquezaNo ratings yet
- Sistema Inyeccion Aveo 120830182031 Phpapp02 PDFDocument586 pagesSistema Inyeccion Aveo 120830182031 Phpapp02 PDFOscar Daniel Molina HernandezNo ratings yet
- Es Ds100e Manual v7.0 SpanishDocument47 pagesEs Ds100e Manual v7.0 SpanishRaulNo ratings yet
- Que Son Las ECUSDocument4 pagesQue Son Las ECUSOscar SotoNo ratings yet
- Curso Airbag Frontal Lateral Estructura Sistema Condiciones Activacion Desarrollo Cronologico Actuadores Esquema ElectricoDocument30 pagesCurso Airbag Frontal Lateral Estructura Sistema Condiciones Activacion Desarrollo Cronologico Actuadores Esquema ElectricoRamon pujolsNo ratings yet
- Inmo EspañolDocument81 pagesInmo Españoledgar100% (1)
- Apuntes Cajasdecambiodevelocidadesautomotrices PDFDocument42 pagesApuntes Cajasdecambiodevelocidadesautomotrices PDFRamon pujolsNo ratings yet
- Manual ProyectECUDocument50 pagesManual ProyectECUjuan fonsecaNo ratings yet
- Tarea para Caja MapDocument18 pagesTarea para Caja MapHassan Gazi Duk EspinozaNo ratings yet
- ssp207 eDocument92 pagesssp207 eEstebanMunaresNo ratings yet
- Cuerpos de Aceleracion y Pedales ElectronicosDocument46 pagesCuerpos de Aceleracion y Pedales ElectronicosDENIS MARCELO UGEÑO GUILCAPI50% (2)
- Manual-208-Esp Ed05 2017-Min 401413 PDFDocument416 pagesManual-208-Esp Ed05 2017-Min 401413 PDFdavid sanchez soraNo ratings yet
- Plataforma MQB de Volkswagen reduce peso y optimiza consumo en hasta 20Document15 pagesPlataforma MQB de Volkswagen reduce peso y optimiza consumo en hasta 20MrArmandonetNo ratings yet
- Manual AutelDocument101 pagesManual AutelFernando Renteria100% (1)
- C5 CCD, Sci, PciDocument40 pagesC5 CCD, Sci, PciErick DavidNo ratings yet
- InyeccionDocument77 pagesInyeccionOscar AcevedoNo ratings yet
- Presentación para CFIE - MultiplexadoDocument20 pagesPresentación para CFIE - MultiplexadoMatias NeiraNo ratings yet
- Programación memoria AstraDocument2 pagesProgramación memoria AstraJavi Chito100% (2)
- Regulacion Inteligente Del Alternador - Igr - SPDocument20 pagesRegulacion Inteligente Del Alternador - Igr - SPjimmy_burgos_11No ratings yet
- BS de Datos LinDocument13 pagesBS de Datos LinPaul ToaquizaNo ratings yet
- Can PsaDocument51 pagesCan PsaJose Maria MonteroNo ratings yet
- Manual BMW f800gtDocument155 pagesManual BMW f800gtahigueraNo ratings yet
- Flex RayDocument177 pagesFlex RayNicolas RuizNo ratings yet
- El protocolo Flexray: arquitectura, topologías y capa físicaDocument28 pagesEl protocolo Flexray: arquitectura, topologías y capa físicaMario Alberto Ramírez ReynaNo ratings yet
- 2.3.1 Semana 9 - FlexrayDocument40 pages2.3.1 Semana 9 - Flexraypakopollo700No ratings yet
- Test Cuestionario Can BusDocument8 pagesTest Cuestionario Can Busberby...No ratings yet
- UF1872 - Implantación y configuración de pasarelasFrom EverandUF1872 - Implantación y configuración de pasarelasRating: 5 out of 5 stars5/5 (1)
- Identifica tus características y cualidadesDocument10 pagesIdentifica tus características y cualidadesjennyNo ratings yet
- Multiculturalidad y ConstituciónDocument168 pagesMulticulturalidad y ConstituciónAngeloQuilcaNo ratings yet
- 03 SolucionesDocument5 pages03 Solucionesacid_knoxNo ratings yet
- Estructuracion Seguridad y SaludDocument145 pagesEstructuracion Seguridad y SaludDANIBATANo ratings yet
- 02 - Homeostasis + Autopoiesis (3° Medio BIO)Document2 pages02 - Homeostasis + Autopoiesis (3° Medio BIO)Ignacio GonzálezNo ratings yet
- Inspecccion Laboral-UsaidDocument30 pagesInspecccion Laboral-UsaidHunterCrackNo ratings yet
- Ejercicios de Presión IIDocument9 pagesEjercicios de Presión IIRenato DonosoNo ratings yet
- Avance 1 - Grupo 1Document4 pagesAvance 1 - Grupo 1edith laricoNo ratings yet
- Neuro PsicologiaDocument10 pagesNeuro PsicologiaZule GarciaNo ratings yet
- Resistencia de MaterialesDocument25 pagesResistencia de MaterialesCharlys D. Villanueva TempladeraNo ratings yet
- 04 - Stasiejko - La Teoría de La Gestalt PDFDocument6 pages04 - Stasiejko - La Teoría de La Gestalt PDFCecy Leyva0% (1)
- Plan de SesionDocument2 pagesPlan de SesionvhprofesorNo ratings yet
- La Politica Exterior de Los Estados - Calduch, RDocument33 pagesLa Politica Exterior de Los Estados - Calduch, RAndres Valera RuizNo ratings yet
- Silabo Abastecimiento de Agua y AlcantarilladoDocument3 pagesSilabo Abastecimiento de Agua y AlcantarilladoEstebanTurpo AnchapuriNo ratings yet
- Batallon de Seguridad Fisica EstatalDocument27 pagesBatallon de Seguridad Fisica EstatalClaudiotakuNo ratings yet
- Estereotipos en La Sociedad Actual - Kelvin Nathaniel Ruiz DuranDocument2 pagesEstereotipos en La Sociedad Actual - Kelvin Nathaniel Ruiz DuranNATHA RUIZNo ratings yet
- Sugerencias Modificacion Conductas Educacion EspecialDocument2 pagesSugerencias Modificacion Conductas Educacion EspecialJesús Lozano RuizNo ratings yet
- Actividad 1 Cocteleria Moderna Sin AlchoholDocument7 pagesActividad 1 Cocteleria Moderna Sin AlchoholmelissaNo ratings yet
- Freud Hasta DiosDocument8 pagesFreud Hasta DiosRoo GimenezNo ratings yet
- PARRA, Eduardo Antonio. Norte, Narcotráfico y LiteraturaDocument3 pagesPARRA, Eduardo Antonio. Norte, Narcotráfico y LiteraturatjmcarvalhalNo ratings yet
- Familia DurkheimianaDocument9 pagesFamilia DurkheimianaNorma TamezNo ratings yet
- Diferencias Conceptuales Entre Cluster y Cadenas Productivas y Sus Implicaciones para La Construccion Del Futuro de RisaraldaDocument22 pagesDiferencias Conceptuales Entre Cluster y Cadenas Productivas y Sus Implicaciones para La Construccion Del Futuro de RisaraldaJohan Sebastián Chávez MosqueraNo ratings yet
- Las 7 Tecnicas de La ComunicacionDocument10 pagesLas 7 Tecnicas de La ComunicacionElionay CarreñoNo ratings yet
- Modelo Planificacion Tecnica (21!2!17)Document4 pagesModelo Planificacion Tecnica (21!2!17)Fabian NeurosisNo ratings yet
- Afroamérica. La Ruta Del EsclavoDocument214 pagesAfroamérica. La Ruta Del EsclavoAndrés Ol100% (3)
- Tema 01 - FisicaDocument2 pagesTema 01 - FisicaYonel Chumbes VeramendiNo ratings yet
- Proyecto 1.acti. Integradora. Unidad 3.karen RamirezDocument5 pagesProyecto 1.acti. Integradora. Unidad 3.karen RamirezKaren Ramirez gonzalezNo ratings yet
- 10 claves del cambioDocument2 pages10 claves del cambioHéctor FitchNo ratings yet
- Sistema Financiero Peruano para SiewebDocument2 pagesSistema Financiero Peruano para Siewebpablobruno0% (1)
- Innovaciones TIC Web20 Oct 08 (Autoguardado)Document511 pagesInnovaciones TIC Web20 Oct 08 (Autoguardado)Taty PatricioNo ratings yet