You might also like
- Single-Phase SEPIC Based PFC Converter For PMBLDCM Drive in Air-Conditioning SystemDocument6 pagesSingle-Phase SEPIC Based PFC Converter For PMBLDCM Drive in Air-Conditioning Systemsarav03No ratings yet
- A Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DriveDocument8 pagesA Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DrivePraful YadavNo ratings yet
- Power Factor Correction in Zeta Converter Fed PMBLDCM Drive For An Air ConditionerDocument6 pagesPower Factor Correction in Zeta Converter Fed PMBLDCM Drive For An Air ConditionertheijesNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document16 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNo ratings yet
- 10 1109@tia 2011 2182329Document7 pages10 1109@tia 2011 2182329SaduMunisekharNo ratings yet
- Power Quality Improvement Using Forward Buck ConverterDocument8 pagesPower Quality Improvement Using Forward Buck ConverterAdavelli Shirisha ReddyNo ratings yet
- Power Quality Improvement in Switched Reluctance Motor Drive Using Zeta ConverterDocument5 pagesPower Quality Improvement in Switched Reluctance Motor Drive Using Zeta ConvertercamiloNo ratings yet
- ProjectDocument30 pagesProjectmitesh goyal100% (1)
- Buck-Boost Converter As Power Factor Correction Controller For Plug-In Electric Vehicles and Battery Charging ApplicationDocument6 pagesBuck-Boost Converter As Power Factor Correction Controller For Plug-In Electric Vehicles and Battery Charging Applicationprakhar agrawalNo ratings yet
- Modeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DDocument5 pagesModeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DSundaraPandiyanNo ratings yet
- Zeta ConvertorDocument17 pagesZeta ConvertorViswanathan ASNo ratings yet
- Design and Implementation of PFC CUK Converter-Based PMBLDCM DriveDocument5 pagesDesign and Implementation of PFC CUK Converter-Based PMBLDCM Drivesarav03No ratings yet
- P. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDocument6 pagesP. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDivya ShriNo ratings yet
- 486 N20038 PDFDocument6 pages486 N20038 PDFguddu13481No ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocument8 pagesA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNo ratings yet
- PFC Z-source CSC converter for BLDCM driveDocument7 pagesPFC Z-source CSC converter for BLDCM driveTechnos_IncNo ratings yet
- Simulation Current Controlled: Converter-InverterDocument5 pagesSimulation Current Controlled: Converter-InverterVivek VickyNo ratings yet
- Grid Interface of Wind PowerDocument34 pagesGrid Interface of Wind PowerM Paul PrasadNo ratings yet
- A VOLTAGE CONTROLLED ADJUSTABLE SPEED PMBLDCM DRIVE USING ADocument84 pagesA VOLTAGE CONTROLLED ADJUSTABLE SPEED PMBLDCM DRIVE USING Amyresearchworkeee2023No ratings yet
- A Neutral-Point Clamped Converter System For Direct-Drive Variable-Speed Wind Power UnitDocument12 pagesA Neutral-Point Clamped Converter System For Direct-Drive Variable-Speed Wind Power UnitNguyen Nga-VietNo ratings yet
- IJETR031989Document5 pagesIJETR031989erpublicationNo ratings yet
- Rajaei 2010Document19 pagesRajaei 2010gerson gomesNo ratings yet
- 4 Gaiceanu2014Document6 pages4 Gaiceanu2014HernandaBudiSantosoNo ratings yet
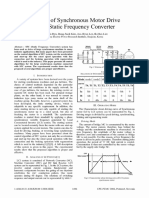
- A Study of Synchronous Motor Drive Using SFC PDFDocument4 pagesA Study of Synchronous Motor Drive Using SFC PDFBrian GuevaraNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDocument4 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterNirmalaNeeruNo ratings yet
- Jacob 2016Document7 pagesJacob 2016TrơNhưNitơNo ratings yet
- Modelling and Simulation: Wind Turbine GeneratorDocument7 pagesModelling and Simulation: Wind Turbine GeneratorEléctrico IngenieríaNo ratings yet
- Ver 1 Boost Converter Fed High Performance BLDC For SPV Air Cooling SystemDocument14 pagesVer 1 Boost Converter Fed High Performance BLDC For SPV Air Cooling SystemD SHOBHA RANINo ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- A Medium-Voltage Motor Drive With A Modular InerterDocument14 pagesA Medium-Voltage Motor Drive With A Modular InerterVaisakhMohanNo ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- 04285962, DJSDocument9 pages04285962, DJSDeepu ChinnaNo ratings yet
- Singh 2006Document10 pagesSingh 2006martin.teruelNo ratings yet
- Power Quality ImprovementDocument5 pagesPower Quality ImprovementPaula SmithNo ratings yet
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDocument8 pagesZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- AC/DC Converter With Active Power Factor Correction Applied To DC Motor DriveDocument9 pagesAC/DC Converter With Active Power Factor Correction Applied To DC Motor DriveIJERDNo ratings yet
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocument5 pagesTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNo ratings yet
- 500w Power Amplifier Circuit DiagramDocument6 pages500w Power Amplifier Circuit DiagramJoão Alberto0% (1)
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Nan Kalayar HlaingDocument5 pagesNan Kalayar HlaingThet TinNo ratings yet
- A Brushless DC Motor Drive With Power Factor Correction Using Isolated Zeta ConverterDocument9 pagesA Brushless DC Motor Drive With Power Factor Correction Using Isolated Zeta ConverterGangadhar AkkiNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDocument6 pagesPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanNo ratings yet
- Performance Comparison of Continuous Conduction Mode (CCM)Document5 pagesPerformance Comparison of Continuous Conduction Mode (CCM)harshalvikasNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDocument4 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterPidikiti Surendra BabuNo ratings yet
- Chow 98 NovelDocument9 pagesChow 98 NovelbmmostefaNo ratings yet
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocument56 pagesA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNo ratings yet
- Boost Power Factor CorectionDocument6 pagesBoost Power Factor CorectionVlad LazărNo ratings yet
- Three-Phase 4-Wire Isolated Wind Energy Conversion System Employing VSC With A T-Connected Transformer For Neutral Current CompensationDocument8 pagesThree-Phase 4-Wire Isolated Wind Energy Conversion System Employing VSC With A T-Connected Transformer For Neutral Current CompensationCircuit ControlarNo ratings yet
- Single Phase To Three Phase ConverterDocument5 pagesSingle Phase To Three Phase ConverterGabriel MejiaNo ratings yet
- Velocity Control of A PMSM Fed by An Inverter-DCDCDocument13 pagesVelocity Control of A PMSM Fed by An Inverter-DCDCAndreea IlieNo ratings yet
- Ijaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)Document8 pagesIjaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)IAEME PublicationNo ratings yet
- Harmonic Mitigation in Ac-Dc Converter For Vector Controlled Induction MotorDocument12 pagesHarmonic Mitigation in Ac-Dc Converter For Vector Controlled Induction MotorAshish SinghNo ratings yet
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDocument5 pagesImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Muhammad Ashiq Muhammad Aslam - 1001693149 PDFDocument1 pageMuhammad Ashiq Muhammad Aslam - 1001693149 PDFMithun KumarNo ratings yet
- MS Vicky Francies Vaz PDFDocument1 pageMS Vicky Francies Vaz PDFMithun KumarNo ratings yet
- Mohammad Sahid Shaikh - 1001693198 PDFDocument1 pageMohammad Sahid Shaikh - 1001693198 PDFMithun KumarNo ratings yet
- Anil Kumar Kavinisseri - 1001692848 PDFDocument1 pageAnil Kumar Kavinisseri - 1001692848 PDFMithun KumarNo ratings yet
- BrochureDocument22 pagesBrochureMithun KumarNo ratings yet
- Mohammad Naushad Mohammad Jamil Akhter - 1001693111 PDFDocument1 pageMohammad Naushad Mohammad Jamil Akhter - 1001693111 PDFMithun KumarNo ratings yet
- Mohammad Arif Ali - 1001693263Document1 pageMohammad Arif Ali - 1001693263Mithun KumarNo ratings yet
- Asif-Ahasan 1001693132 PDFDocument1 pageAsif-Ahasan 1001693132 PDFMithun KumarNo ratings yet
- Lijeesh Kumar Puthiya Purayil - 1001693261Document1 pageLijeesh Kumar Puthiya Purayil - 1001693261Mithun KumarNo ratings yet
- Kashif-Zaman 1001692787Document1 pageKashif-Zaman 1001692787Mithun KumarNo ratings yet
- Lancy Wilfred Pinto - 1001693220Document1 pageLancy Wilfred Pinto - 1001693220Mithun KumarNo ratings yet
- Asif-Ahasan 1001693132 PDFDocument1 pageAsif-Ahasan 1001693132 PDFMithun KumarNo ratings yet
- YZFR1X (C) : Owner'S ManualDocument118 pagesYZFR1X (C) : Owner'S ManualMithun KumarNo ratings yet
- Truck and Bus Handbook: A Guide To Safe DrivingDocument36 pagesTruck and Bus Handbook: A Guide To Safe DrivingAsim khanNo ratings yet
- Anil Kumar Kavinisseri - 1001692848 PDFDocument1 pageAnil Kumar Kavinisseri - 1001692848 PDFMithun KumarNo ratings yet
- Bernard Butterfly ValveDocument9 pagesBernard Butterfly ValveCharles BenwariNo ratings yet
- Basic Manual: Av ReceiverDocument20 pagesBasic Manual: Av ReceiverReynaldo Juanito Ludo LafortezaNo ratings yet
- SpringGTX 2015 Booklet Final - Compressed-1 PDFDocument40 pagesSpringGTX 2015 Booklet Final - Compressed-1 PDFMithun KumarNo ratings yet
- 17 Ranger Fme 26e-26a LR TdiDocument26 pages17 Ranger Fme 26e-26a LR TdiMithun KumarNo ratings yet
- Monoprice MP Mini Delta 3D Printer Quick Start GuideDocument1 pageMonoprice MP Mini Delta 3D Printer Quick Start GuideMithun KumarNo ratings yet
- Bajaj Pulsar Ns200Document103 pagesBajaj Pulsar Ns200Saran Kumar AnandNo ratings yet
- Uae Vat Return: Hoe To File?Document29 pagesUae Vat Return: Hoe To File?sanaclNo ratings yet
- Yzfr14c81 PDFDocument89 pagesYzfr14c81 PDFMithun KumarNo ratings yet
- GE MX-150 ManualDocument28 pagesGE MX-150 ManualCristian Munoz60% (5)
- City BrochureDocument16 pagesCity BrochureLovepreetSinghNo ratings yet
- ABB Component Drives: ACS150, 0.37 To 4 KW / 0.5 To 5 HP Technical CatalogueDocument8 pagesABB Component Drives: ACS150, 0.37 To 4 KW / 0.5 To 5 HP Technical CatalogueMithun KumarNo ratings yet
- City BrochureDocument16 pagesCity BrochureLovepreetSinghNo ratings yet
- Jeep Liberty 2005 User ManualDocument424 pagesJeep Liberty 2005 User ManualJorge QuintelaNo ratings yet
- ABB Drives ACS150 User ManualDocument170 pagesABB Drives ACS150 User ManualmealysrNo ratings yet
- 16 Expedition FME enDocument14 pages16 Expedition FME enMithun KumarNo ratings yet
- NES 150 SpecDocument2 pagesNES 150 SpecZhaqir HusseinNo ratings yet
- Introduction To Nanotechnology: 1.1 Nanotechnology - Definition and ExamplesDocument15 pagesIntroduction To Nanotechnology: 1.1 Nanotechnology - Definition and ExamplesMustafaNo ratings yet
- LX3V Programmable Logic Controller I/O and SpecsDocument4 pagesLX3V Programmable Logic Controller I/O and SpecsElgin GineteNo ratings yet
- IR Proximity Sensor GuideDocument10 pagesIR Proximity Sensor GuideTony Stark100% (1)
- Electronics Voltage TransformerDocument8 pagesElectronics Voltage TransformerDHARMENDRA100% (1)
- A1205 Datasheet PDFDocument14 pagesA1205 Datasheet PDFAlekso GjakovskiNo ratings yet
- Infineon - Brochure - Motor ControlDocument42 pagesInfineon - Brochure - Motor ControlRyan AngelesNo ratings yet
- Aust/Eee: Ahsanullah University of Science and TechnologyDocument27 pagesAust/Eee: Ahsanullah University of Science and Technologyruhul aminNo ratings yet
- Synopsis On GSM Based Data LoggerDocument16 pagesSynopsis On GSM Based Data LoggerUday DesaiNo ratings yet
- Kazuaki ToyouraDocument7 pagesKazuaki ToyouraEstudiante2346No ratings yet
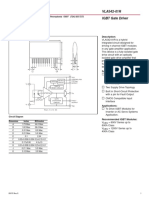
- VLA542-01R IGBT Gate Driver ICDocument6 pagesVLA542-01R IGBT Gate Driver ICGustavo ChaconNo ratings yet
- Sure Step ManualDocument124 pagesSure Step Manualphild2na2No ratings yet
- LB1967Document5 pagesLB1967Marcelituz RojasNo ratings yet
- Photovoltaic Effect of Copper Photovoltaic Cells: Catibog, J.M.R., Mercado, A.R.T., See, A.J.GDocument3 pagesPhotovoltaic Effect of Copper Photovoltaic Cells: Catibog, J.M.R., Mercado, A.R.T., See, A.J.GRomina MercadoNo ratings yet
- A Self-Consistent Solution of Schrodinger Poisson Equations Using A Nonuniform MeshDocument6 pagesA Self-Consistent Solution of Schrodinger Poisson Equations Using A Nonuniform MeshGhasem AlahyarizadehNo ratings yet
- Making a Difference with MIPsDocument8 pagesMaking a Difference with MIPsAvinashNo ratings yet
- P6X58D Premium Vs Rampage III GeneDocument4 pagesP6X58D Premium Vs Rampage III Genestarams5No ratings yet
- Untitled PresentationDocument14 pagesUntitled Presentationapi-626528862No ratings yet
- STK0765BF: Switching Regulator Applications FeaturesDocument8 pagesSTK0765BF: Switching Regulator Applications Featuresmaksyd2No ratings yet
- LM 2675Document30 pagesLM 2675JozefNo ratings yet
- Optical Current Transformer: Applications and AdvantagesDocument20 pagesOptical Current Transformer: Applications and Advantagesshubham jaiswalNo ratings yet
- Datasheet Ring Cores (Toroides de Ferrite)Document21 pagesDatasheet Ring Cores (Toroides de Ferrite)Martín Mura0% (1)
- Big Ideas - Electromagnetism and ElectronicsDocument26 pagesBig Ideas - Electromagnetism and ElectronicsKhushal Gupta100% (1)
- Gallium Nitride 28V, 100W RF Power TransistorDocument10 pagesGallium Nitride 28V, 100W RF Power TransistorJohan BecerraNo ratings yet
- LED 3mm Red PDFDocument4 pagesLED 3mm Red PDFEra O Que FaltavaNo ratings yet
- MICROTEST MTR3 Micro Scratch and Micro - Indenter TesterDocument5 pagesMICROTEST MTR3 Micro Scratch and Micro - Indenter TesterMIGUEL LOPEZNo ratings yet
- DC Motor Bidirectional Speed Control Using PWM PDFDocument5 pagesDC Motor Bidirectional Speed Control Using PWM PDFM Rameez Ur Rehman100% (1)
- 421 4-1990 PDFDocument30 pages421 4-1990 PDFTeerdala RakeshNo ratings yet
- Samsung's Reaction To Chinese CompetitionDocument11 pagesSamsung's Reaction To Chinese CompetitionTinakhaladze100% (6)