You might also like
- Vibration: Analysis and MonitoringDocument53 pagesVibration: Analysis and MonitoringВинисиоNo ratings yet
- Two-Dimensional Elasticity Theories and Plane ProblemsDocument18 pagesTwo-Dimensional Elasticity Theories and Plane ProblemsHk Lorilla QuongNo ratings yet
- Bolted Connections: 1.1 Range and Class of The Screw FastenersDocument8 pagesBolted Connections: 1.1 Range and Class of The Screw FastenersksNo ratings yet
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagoteNo ratings yet
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem SolutionJoseph Daguio JrNo ratings yet
- Bolt Load Calculation StepsDocument2 pagesBolt Load Calculation StepsSrikanth ShankarNo ratings yet
- Wind and Earthquake Analysis Results SummaryDocument8 pagesWind and Earthquake Analysis Results SummaryBrahim HammamiNo ratings yet
- Pin Base ModuleDocument16 pagesPin Base ModuleMd Ahsanul KabirNo ratings yet
- Random Vibration 845826Document22 pagesRandom Vibration 845826yash pradhanNo ratings yet
- Bolt Tensioning: What is it and how does it workDocument2 pagesBolt Tensioning: What is it and how does it work4jawwy markme026No ratings yet
- Subroutine For Cohesive ElementDocument41 pagesSubroutine For Cohesive ElementBhushanRaj100% (1)
- Cycle Counting Methods For FatigueDocument7 pagesCycle Counting Methods For FatigueArdiyan Arezel ArdhyNo ratings yet
- Advanced Design Slab Defections PDFDocument31 pagesAdvanced Design Slab Defections PDFPanus PattamasarawuthNo ratings yet
- PVEfea Assembly AnalysisDocument20 pagesPVEfea Assembly AnalysisAnandh PsNo ratings yet
- Response Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Document15 pagesResponse Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Anonymous UibQYvc6No ratings yet
- This Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyDocument44 pagesThis Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyRaturi DeepankarNo ratings yet
- Design of Steel Platform Isometric and Dimension DrawingsDocument48 pagesDesign of Steel Platform Isometric and Dimension DrawingsihpeterNo ratings yet
- SikaDocument8 pagesSikaPrakashNo ratings yet
- Major Project ShredderDocument12 pagesMajor Project Shredderaman kumarNo ratings yet
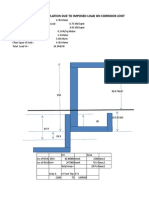
- Deflection Calculation Due To Imposed Load On Corridor JoistDocument14 pagesDeflection Calculation Due To Imposed Load On Corridor JoistranjitNo ratings yet
- FEM Analysis Of A Plane Beam StructureDocument10 pagesFEM Analysis Of A Plane Beam Structuremiry89No ratings yet
- Earthquake Load Calculations As Per IS1893-2002.-: Building Xyz at Mumbai. Rev - Mar2003 HSVDocument9 pagesEarthquake Load Calculations As Per IS1893-2002.-: Building Xyz at Mumbai. Rev - Mar2003 HSVeco protectionNo ratings yet
- AS4041 ASME B31 - 3 Pipe Wall ThicknessDocument1 pageAS4041 ASME B31 - 3 Pipe Wall ThicknesselleNo ratings yet
- Dynamic Systems Intro 031906 DYNSYS PDFDocument18 pagesDynamic Systems Intro 031906 DYNSYS PDFjohn_max03No ratings yet
- Col Eff Lenth & Slenderness EffectDocument3 pagesCol Eff Lenth & Slenderness EffectAnonymous Of0C4dNo ratings yet
- 11 Problems - 11 Solutions: Case Histories of 11 Machinery Vibration Problems - Part 1Document7 pages11 Problems - 11 Solutions: Case Histories of 11 Machinery Vibration Problems - Part 1Ahmed El-ShafeiNo ratings yet
- 5CT2 - Stability of DwallDocument2 pages5CT2 - Stability of Dwallloc khaNo ratings yet
- Pressure Vessel Inspection ReportDocument33 pagesPressure Vessel Inspection ReportJinlong SuNo ratings yet
- BoltDocument39 pagesBoltHarmeet SinghNo ratings yet
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDocument12 pages2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuNo ratings yet
- Calculation note for compressor shelter steel structure designDocument54 pagesCalculation note for compressor shelter steel structure designmaniaxpdfNo ratings yet
- R D Vib Ti Random Vibration: ANSYS Mechanical ANSYS Mechanical DynamicsDocument22 pagesR D Vib Ti Random Vibration: ANSYS Mechanical ANSYS Mechanical DynamicsRoss WaringNo ratings yet
- Nonlinear analysis of earthquake-induced vibrationsDocument28 pagesNonlinear analysis of earthquake-induced vibrationsAfham AhmadNo ratings yet
- Friction Type Connections FullDocument64 pagesFriction Type Connections FullmohammedNo ratings yet
- Design of BeamDocument6 pagesDesign of BeamKen ZoraNo ratings yet
- Report Structure Analysis SummaryDocument148 pagesReport Structure Analysis SummarythoriqNo ratings yet
- KBC2009 풍하중산정 (YJ, 110427)Document48 pagesKBC2009 풍하중산정 (YJ, 110427)이영준100% (2)
- Slot Expansion CalculationDocument1 pageSlot Expansion CalculationSarfaraz KhanNo ratings yet
- Bond-Slip Model For Detailed Finite-Element AnalysisDocument10 pagesBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighNo ratings yet
- Lightning protection design loading chartDocument84 pagesLightning protection design loading chartjesusgameboyNo ratings yet
- AISC member dimensions and properties viewerDocument23 pagesAISC member dimensions and properties viewerMadara Uchija100% (1)
- Design Load Calculation ResourceDocument63 pagesDesign Load Calculation Resourceruby-blackNo ratings yet
- Bolt TighteningDocument6 pagesBolt TighteningahmedbeaetNo ratings yet
- Earthquake load calculations as per IS1893-2002Document9 pagesEarthquake load calculations as per IS1893-2002irshad313No ratings yet
- PDF2 L Hydraulic CylinderDocument56 pagesPDF2 L Hydraulic CylinderShyam Srinivasan100% (1)
- Crack Width Is456 0.1Document2 pagesCrack Width Is456 0.1Suhas MangaloreNo ratings yet
- Damped SDOF vibration analysisDocument13 pagesDamped SDOF vibration analysisAli Haider RizviNo ratings yet
- M3D - SampleProblemSet ACI PDFDocument6 pagesM3D - SampleProblemSet ACI PDFasaisenthilNo ratings yet
- EQL and DesignDocument6 pagesEQL and Designsabareesan09No ratings yet
- BMD SFDDocument3 pagesBMD SFDShrinath ShetNo ratings yet
- Example 04 (Thermal Stress) PDFDocument12 pagesExample 04 (Thermal Stress) PDFLuis HuayaneyNo ratings yet
- CohesiveZoneModels PDFDocument31 pagesCohesiveZoneModels PDFGopal KondaguntaNo ratings yet
- Moment Connections Bolted WeltedDocument6 pagesMoment Connections Bolted WeltedRavirajsinh JadejaNo ratings yet
- PV Elite ResultDocument239 pagesPV Elite ResultChaitanya Sai TNo ratings yet
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- Lecture 5Document52 pagesLecture 5Wbamlak AshebrNo ratings yet
- Vibration: One of The Possible Modes of Vibration of A Circular Drum (See Other Modes)Document10 pagesVibration: One of The Possible Modes of Vibration of A Circular Drum (See Other Modes)Maung Tun LinNo ratings yet
- MEASURING VIBRATION & DISPLACEMENTDocument6 pagesMEASURING VIBRATION & DISPLACEMENTSatNo ratings yet
- Vibration AnalysisDocument14 pagesVibration AnalysisHarish KumarNo ratings yet
- Ship BreakingDocument46 pagesShip BreakingMaJo0oDe100% (2)
- M074-SHINE-Slit The WidthDocument6 pagesM074-SHINE-Slit The WidthMaJo0oDeNo ratings yet
- Wheelchair Manual-Final PDFDocument37 pagesWheelchair Manual-Final PDFMuthuraj ShunmugavelNo ratings yet
- Refrigeration Cycles Study Guide in Powerpoint: To AccompanyDocument20 pagesRefrigeration Cycles Study Guide in Powerpoint: To AccompanyDocumentos De Interés para IngenieríaNo ratings yet
- Materials Selection For Engineering DesignDocument31 pagesMaterials Selection For Engineering Designsyamsudin2006No ratings yet
- Em220 11202008 A2Document16 pagesEm220 11202008 A2MaJo0oDeNo ratings yet
- Sample Problems Exam 1 Solution with 18 Detailed StepsDocument18 pagesSample Problems Exam 1 Solution with 18 Detailed StepsMaJo0oDeNo ratings yet
- Speed, Agility AND QUICKNESS TRAINING PDFDocument10 pagesSpeed, Agility AND QUICKNESS TRAINING PDFPaulo TsunetaNo ratings yet
- Speed Control of DC MotorDocument19 pagesSpeed Control of DC MotorVijaya LakshmiNo ratings yet
- CM15TF-12H: Mitsubishi Igbt ModulesDocument4 pagesCM15TF-12H: Mitsubishi Igbt ModulesAbdul KurniadiNo ratings yet
- Ad Cpp+ii+Document15 pagesAd Cpp+ii+Kuldeep SinghNo ratings yet
- Astm D523Document5 pagesAstm D523CEMRE YAŞLINo ratings yet
- Wind Turbine Foundation Grounding ConsiderationsDocument28 pagesWind Turbine Foundation Grounding ConsiderationsDejanNo ratings yet
- Fuel Cell Electric VehicleDocument18 pagesFuel Cell Electric VehicleRohit PatilNo ratings yet
- Micro Centrifuge Mini (GYROZEN) Service - ManualDocument17 pagesMicro Centrifuge Mini (GYROZEN) Service - ManualUsman ZahidNo ratings yet
- Adsorption IsothermDocument4 pagesAdsorption IsothermM.HamidNo ratings yet
- Electromagnetic Waves PresentationDocument14 pagesElectromagnetic Waves PresentationCyril CauilanNo ratings yet
- SFRADocument14 pagesSFRARahul DasNo ratings yet
- Hoek Cell & Pressurisation System: Biaxial ChamberDocument2 pagesHoek Cell & Pressurisation System: Biaxial ChamberNguyễn Văn MinhNo ratings yet
- Performance Simulation of Turboprop Engine For Basic TrainerDocument13 pagesPerformance Simulation of Turboprop Engine For Basic TrainerPaulo Augusto V. XavierNo ratings yet
- Heat Transfer CHE0301 LECTURE 2 Basics of Heat TransferDocument21 pagesHeat Transfer CHE0301 LECTURE 2 Basics of Heat TransfermiraNo ratings yet
- Lecture 27 Thermal Engineering II (08.09.2020)Document81 pagesLecture 27 Thermal Engineering II (08.09.2020)Dr. BIBIN CHIDAMBARANATHANNo ratings yet
- The Probe Level Monitor: Instruction Manual PL-517 January 2001Document20 pagesThe Probe Level Monitor: Instruction Manual PL-517 January 2001horacio mondragon100% (1)
- Stress Analysis Chapter 3Document2 pagesStress Analysis Chapter 3sijyvinodNo ratings yet
- EZ01000115 EFR 012 HygrostatDocument1 pageEZ01000115 EFR 012 HygrostatMallampati RamakrishnaNo ratings yet
- Mechanical Vibration Modeling and AnalysisDocument152 pagesMechanical Vibration Modeling and AnalysisTiago Rodrigues Dos SantosNo ratings yet
- Molecular Modelling and Drug DesigningDocument16 pagesMolecular Modelling and Drug DesigningAsh-shirHasanNo ratings yet
- Newtons CradleDocument1 pageNewtons CradlepenkmanjacobNo ratings yet
- Lecture 5Document12 pagesLecture 5ShehataRaheem DrEngNo ratings yet
- Specific Gravity of Soil Solids Lab ReportDocument12 pagesSpecific Gravity of Soil Solids Lab ReportGeojanni PangibitanNo ratings yet
- IS - IEC 62271-1 (2007) - High-Voltage Switchgear and Controlgear, Part 1 - Common SpecificationsDocument2 pagesIS - IEC 62271-1 (2007) - High-Voltage Switchgear and Controlgear, Part 1 - Common SpecificationsAnand KumarNo ratings yet
- Rittal - Industrial Enclosure Solutions: Issue TwoDocument56 pagesRittal - Industrial Enclosure Solutions: Issue TwojohnNo ratings yet
- Module 2: Resultant of Any Force SystemDocument9 pagesModule 2: Resultant of Any Force SystemVINCE VITRIOLONo ratings yet
- 3AP1 FI 110kV UputstvoDocument112 pages3AP1 FI 110kV UputstvoWhitney HoffmanNo ratings yet
- Gas-Liquid Separator DesignDocument54 pagesGas-Liquid Separator DesignEng Kim Wei100% (6)
- Autopeso - PA6140 - 6240Document1 pageAutopeso - PA6140 - 6240Yeison DurangoNo ratings yet
- Christie Cp4330 RGB DatasheetDocument2 pagesChristie Cp4330 RGB DatasheetWahyu HalimNo ratings yet