You might also like
- Adc0808 and 8253Document35 pagesAdc0808 and 8253Avanish NiranjanNo ratings yet
- Laboratory 12 - SMPSDocument3 pagesLaboratory 12 - SMPSAriana Ribeiro LameirinhasNo ratings yet
- Digital Modulation PDFDocument41 pagesDigital Modulation PDFPabitraMandalNo ratings yet
- 12$ 30Mhz Signal Generator Using Arduino: 7 November, 2016 RikDocument5 pages12$ 30Mhz Signal Generator Using Arduino: 7 November, 2016 RikedosviracNo ratings yet
- UNIT 3-2marks-FET PDFDocument9 pagesUNIT 3-2marks-FET PDFpriyanka236No ratings yet
- Mikom Remote Unit Software ManualDocument35 pagesMikom Remote Unit Software ManualealforaNo ratings yet
- WCDMA-P&O-A-EN-WCDMA Interference Investigation-201012Document63 pagesWCDMA-P&O-A-EN-WCDMA Interference Investigation-201012Dawood MayarNo ratings yet
- Non Linear Wave ShapingDocument33 pagesNon Linear Wave ShapingArun Kumar DhupamNo ratings yet
- SWP PID ControllerDocument28 pagesSWP PID Controllergauravjuyal1988No ratings yet
- Analog Electronic Circuits Question BankDocument48 pagesAnalog Electronic Circuits Question BankchaitanyaNo ratings yet
- Electrical-Engineering Engineering Power-Electronics Controlled-Rectifiers NotesDocument38 pagesElectrical-Engineering Engineering Power-Electronics Controlled-Rectifiers NotesRavi Prasad AmanapuNo ratings yet
- 8051 Micro ControllerDocument9 pages8051 Micro Controllerapi-2654853880% (5)
- Active High Pass and Low Pass FilterDocument16 pagesActive High Pass and Low Pass FilterVINITA AGARWAL50% (2)
- Clipper and ClamperDocument25 pagesClipper and ClamperVinay YadavNo ratings yet
- Chapter 2 Zener Diode AnalysisDocument11 pagesChapter 2 Zener Diode AnalysisKiadam KitouNo ratings yet
- Adc0808 and 8253Document35 pagesAdc0808 and 8253Avanish NiranjanNo ratings yet
- Shift RegisterDocument25 pagesShift RegisterdianseptyaNo ratings yet
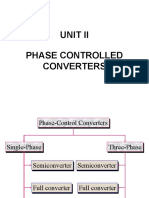
- Unit Ii Phase Controlled ConvertersDocument102 pagesUnit Ii Phase Controlled ConverterscoolrajeeeNo ratings yet
- Triac Diac CalculatorDocument84 pagesTriac Diac CalculatorBinh NguyenNo ratings yet
- Three Phase Firing Angle Contol Using Arm 7 ProcessorDocument3 pagesThree Phase Firing Angle Contol Using Arm 7 ProcessorShravan JadhavNo ratings yet
- DPSK Modulation and DemodulationDocument7 pagesDPSK Modulation and Demodulationtaherakhans100% (1)
- RADAR SYSTEMS VR19-unit2Document59 pagesRADAR SYSTEMS VR19-unit2Mummana Mohan ShankarNo ratings yet
- Normarc 7000 ILS Installation and Commissioning Handbook Vol 1 and 2 91129Document2 pagesNormarc 7000 ILS Installation and Commissioning Handbook Vol 1 and 2 91129Dertyh KuhtlerNo ratings yet
- Binder Wiring Puri Ex Pillar RewiringDocument10 pagesBinder Wiring Puri Ex Pillar RewiringWiratama MudaNo ratings yet
- LCD and KEYBORD Interfacing Part 1Document25 pagesLCD and KEYBORD Interfacing Part 1Prathamesh AmateNo ratings yet
- Provisional Acceptance Test PAT Report FDocument5 pagesProvisional Acceptance Test PAT Report Fphantd_hcmNo ratings yet
- Shubham Rathod FOC LabDocument42 pagesShubham Rathod FOC LabShubham RathodNo ratings yet
- MSK ModulationDocument31 pagesMSK Modulationnassr_ismailNo ratings yet
- Topic 5 - MultivibratorsDocument12 pagesTopic 5 - MultivibratorsPatrick TeodoroNo ratings yet
- Police Light FinalDocument4 pagesPolice Light Finalmrindian88No ratings yet
- 8.1 Finite Word Length EffectsDocument18 pages8.1 Finite Word Length EffectsRajaMandapatiNo ratings yet
- Diff BTWN MOSFET and BJTDocument2 pagesDiff BTWN MOSFET and BJTMadan R HonnalagereNo ratings yet
- Ds Agile 6.0 OfficialDocument8 pagesDs Agile 6.0 OfficialEver SmileNo ratings yet
- Unit-3::Half Wave Rectifier, Ripple Factor, Full WaveDocument12 pagesUnit-3::Half Wave Rectifier, Ripple Factor, Full WaveHemant TulsaniNo ratings yet
- Digital Communication Line Codes PDFDocument7 pagesDigital Communication Line Codes PDFAzImmNo ratings yet
- Control of Single Phase To Three Phase AcDocument10 pagesControl of Single Phase To Three Phase Acpriya dharshiniNo ratings yet
- Block Diagram of 8255 WITH ExplanationDocument8 pagesBlock Diagram of 8255 WITH Explanationsenthilkumar100% (2)
- Exp 11 Single Phase Inverter Part IDocument7 pagesExp 11 Single Phase Inverter Part Iusmpowerlab0% (1)
- DLD Lab Manual 7 FlipFlopsDocument6 pagesDLD Lab Manual 7 FlipFlopsHanzala NasirNo ratings yet
- Space Wave PropagationDocument40 pagesSpace Wave Propagationece4 2015No ratings yet
- A1000Document8 pagesA1000monikaNo ratings yet
- Programmable Peripheral Interface Devices: Support ChipsDocument25 pagesProgrammable Peripheral Interface Devices: Support ChipsMadhuNo ratings yet
- 616 PC5 Instruction ManualDocument150 pages616 PC5 Instruction ManualMr.K chNo ratings yet
- 8051 PPTDocument30 pages8051 PPTBhaskarReddyVangalaNo ratings yet
- Iii B.Tech Ii Sem Eie (R18) : PLC Intermediate and Advanced FunctionsDocument83 pagesIii B.Tech Ii Sem Eie (R18) : PLC Intermediate and Advanced FunctionsSrinivas PapaniNo ratings yet
- Considering: Rec. ITU-R P.530-8 1Document34 pagesConsidering: Rec. ITU-R P.530-8 1Vladan BozicNo ratings yet
- On IgbtDocument19 pagesOn IgbtSayanta Saha100% (1)
- Ece V Analog Communication (10ec53) AssignmentDocument2 pagesEce V Analog Communication (10ec53) AssignmentAbdul AzeezNo ratings yet
- Analog communication: Balanced modulator using diodesDocument5 pagesAnalog communication: Balanced modulator using diodesJasdeep SinghNo ratings yet
- What Is An "M7" Diode?: Sherrellbc Jan 16 '15 at 15:45Document2 pagesWhat Is An "M7" Diode?: Sherrellbc Jan 16 '15 at 15:45Jai Ho100% (1)
- Ne5521 Sa5521 2Document11 pagesNe5521 Sa5521 2José AdelinoNo ratings yet
- Esquema elétrico placa de comando SiriaDocument24 pagesEsquema elétrico placa de comando SiriaAndre Louis GrangeonNo ratings yet
- Screenshot 2021-04-17 at 6.09.21 PMDocument9 pagesScreenshot 2021-04-17 at 6.09.21 PMMaria ShibuNo ratings yet
- MTI and Pulse Doppler RadarDocument24 pagesMTI and Pulse Doppler RadarHaswanth CHNo ratings yet
- RadarEngineering - Lecturenotes UNIT 3.1Document12 pagesRadarEngineering - Lecturenotes UNIT 3.1Tulasi SaiNo ratings yet
- CW and FM-CW Radar: Doppler EffectDocument27 pagesCW and FM-CW Radar: Doppler EffectBhanuprakash Reddy PalapatiNo ratings yet
- Unit 5 - MTInPDR - Part ADocument51 pagesUnit 5 - MTInPDR - Part AChandrashekher CNo ratings yet
- Mti and Pulse Doppler RadarDocument50 pagesMti and Pulse Doppler RadarSaurabh KatiyarNo ratings yet
- MTIDocument24 pagesMTIRaji PNo ratings yet
- Kriptografija - Stanford UniverzitetDocument154 pagesKriptografija - Stanford UniverzitetDeVigenereNo ratings yet
- CssDocument10 pagesCssconn9999No ratings yet
- ServletConfig InterfaceDocument5 pagesServletConfig InterfaceWaqar ShaikhNo ratings yet
- NCFM Tecnical Analusis ModuleDocument172 pagesNCFM Tecnical Analusis ModuleDeepali Mishra83% (6)
- NCFM Tecnical Analusis ModuleDocument172 pagesNCFM Tecnical Analusis ModuleDeepali Mishra83% (6)
- Sample Resume1Document6 pagesSample Resume1Waqar ShaikhNo ratings yet
- Fidelity InvestmentsDocument1 pageFidelity InvestmentsWaqar ShaikhNo ratings yet
- About Kia Motors Corporation: All-NewDocument19 pagesAbout Kia Motors Corporation: All-NewWessam FathiNo ratings yet
- Frito LaysDocument6 pagesFrito LaysElcamino Torrez50% (2)
- Kim Lighting WTC Wide Throw Cutoff Brochure 1976Document24 pagesKim Lighting WTC Wide Throw Cutoff Brochure 1976Alan MastersNo ratings yet
- Paper 19 Revised PDFDocument520 pagesPaper 19 Revised PDFAmey Mehta100% (1)
- Sonydsp v77 SM 479622 PDFDocument41 pagesSonydsp v77 SM 479622 PDFmorvetrNo ratings yet
- Flyaudio in An 08 Is250 With Factory Nav InstructionsDocument2 pagesFlyaudio in An 08 Is250 With Factory Nav InstructionsAndrewTalfordScottSr.No ratings yet
- Mechanical Design of Shell and Tube Type PDFDocument4 pagesMechanical Design of Shell and Tube Type PDFSuryaprakashNo ratings yet
- Dhilshahilan Rajaratnam: Work ExperienceDocument5 pagesDhilshahilan Rajaratnam: Work ExperienceShazard ShortyNo ratings yet
- Dhabli - 1axis Tracker PVSYSTDocument5 pagesDhabli - 1axis Tracker PVSYSTLakshmi NarayananNo ratings yet
- Parts 3121106 1-2-12 ANSI EnglishDocument246 pagesParts 3121106 1-2-12 ANSI EnglishAndres JimenezNo ratings yet
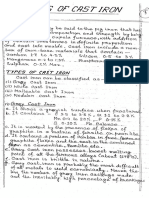
- Welding of Cast IronDocument10 pagesWelding of Cast IronKrishnendu RouthNo ratings yet
- RA 8042 and RA 10022 ComparedDocument37 pagesRA 8042 and RA 10022 ComparedCj GarciaNo ratings yet
- Mr. Arshad Nazer: Bawshar, Sultanate of OmanDocument2 pagesMr. Arshad Nazer: Bawshar, Sultanate of OmanTop GNo ratings yet
- GE's Two-Decade Transformation: Jack Welch's Leadership: Amanda Rodriguez Patricia Robledo Brittany Culberson Yue JiangDocument34 pagesGE's Two-Decade Transformation: Jack Welch's Leadership: Amanda Rodriguez Patricia Robledo Brittany Culberson Yue JiangRishendra Singh RathourNo ratings yet
- D882 - Pruebas A Películas.Document11 pagesD882 - Pruebas A Películas.CamiloSilvaNo ratings yet
- CJCuny Talmor PE TurnaroundsDocument18 pagesCJCuny Talmor PE TurnaroundsMayank Shankar SinghNo ratings yet
- Lecture Notes in Airport Engineering PDFDocument91 pagesLecture Notes in Airport Engineering PDFMaya RajNo ratings yet
- Priceliost Ecatalog 2021 Div. DiagnosticDocument2 pagesPriceliost Ecatalog 2021 Div. Diagnosticwawan1010No ratings yet
- Newspaper CritiqueDocument4 pagesNewspaper CritiquebojoiNo ratings yet
- Javacore 20100918 202221 6164 0003Document44 pagesJavacore 20100918 202221 6164 0003actmon123No ratings yet
- ION8650 DatasheetDocument11 pagesION8650 DatasheetAlthaf Axel HiroshiNo ratings yet
- What is a Server ClusterDocument2 pagesWhat is a Server Clusterfikru tesefayeNo ratings yet
- Gil Sanchez, Labason Zamboanga Del Norte: AmacaDocument2 pagesGil Sanchez, Labason Zamboanga Del Norte: AmacaMacky BirdNo ratings yet
- Data Science Machine LearningDocument15 pagesData Science Machine LearningmagrinraphaelNo ratings yet
- Lifetime Physical Fitness and Wellness A Personalized Program 14th Edition Hoeger Test BankDocument34 pagesLifetime Physical Fitness and Wellness A Personalized Program 14th Edition Hoeger Test Bankbefoolabraida9d6xm100% (26)
- Wizard's App Pitch Deck by SlidesgoDocument52 pagesWizard's App Pitch Deck by SlidesgoandreaNo ratings yet
- CPWD Contractor Enlistment Rules 2005 SummaryDocument71 pagesCPWD Contractor Enlistment Rules 2005 Summaryvikky717No ratings yet
- Real-Time Java and ATCDocument44 pagesReal-Time Java and ATCdnk_victon6248No ratings yet
- Project On SamsungDocument39 pagesProject On SamsungAbbas0% (1)
- Education, A Vital Principle For Digital Library Development in IranDocument23 pagesEducation, A Vital Principle For Digital Library Development in Iranrasuli9No ratings yet