You might also like
- A PIC Microcontroller IntroductionDocument10 pagesA PIC Microcontroller IntroductionMoorthy Manikandan100% (4)
- Remote Controlled FanDocument4 pagesRemote Controlled FanJostin PunnasseryNo ratings yet
- PIC32 FamiliaDocument6 pagesPIC32 Familiaffcscribd100% (1)
- AVR: Which Microcontroller To Choose: PIC VsDocument17 pagesAVR: Which Microcontroller To Choose: PIC VsMuhammad Zawar100% (1)
- Remote Controlled Fan RegulatorDocument23 pagesRemote Controlled Fan RegulatorPradeep100% (5)
- Scrolling 16 2 Led in PICDocument23 pagesScrolling 16 2 Led in PICmalhiavtarsingh100% (3)
- Introdution To The DsPIC30FDocument17 pagesIntrodution To The DsPIC30Fboyluca100% (1)
- PIC16 Sine-Wave InverterDocument1 pagePIC16 Sine-Wave Inverterhoangdai100% (4)
- Introduction To The PIC32 - The Basics, Getting Started, IO Ports and The First ProgramDocument17 pagesIntroduction To The PIC32 - The Basics, Getting Started, IO Ports and The First Programtahmidmc100% (1)
- Ee - 105 - ADSP-2100 Family C Programming Examples Guide (En)Document61 pagesEe - 105 - ADSP-2100 Family C Programming Examples Guide (En)tiretrakNo ratings yet
- 8-Bit PIC® MicrocontrollersDocument12 pages8-Bit PIC® Microcontrollersகாஸ்ட்ரோ சின்னா100% (1)
- Introduction To The PIC32 - The Basics, Getting Started, IO Ports and The First ProgramDocument17 pagesIntroduction To The PIC32 - The Basics, Getting Started, IO Ports and The First Programtahmidmc100% (5)
- PWM Inverter Part II Chapter AnalysisDocument35 pagesPWM Inverter Part II Chapter AnalysisM.h. SawonNo ratings yet
- 02 PIC ADC Final PDFDocument68 pages02 PIC ADC Final PDFRagini GuptaNo ratings yet
- Arduino Basics for Amateur RadioDocument36 pagesArduino Basics for Amateur Radiomercury7k29750No ratings yet
- Introduction To Embedded SystemsDocument33 pagesIntroduction To Embedded Systemscharanpreetg1100% (1)
- PIC Power SupplyDocument0 pagesPIC Power Supplyaqdus100% (1)
- A Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel GalileoDocument15 pagesA Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel Galileotahmidmc100% (2)
- CCS ExampleDocument28 pagesCCS Exampletuane07100% (3)
- Lecture 9 USB To PIC Microcontroller InterfaceDocument8 pagesLecture 9 USB To PIC Microcontroller Interfaceaaaa100% (1)
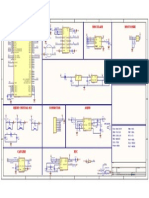
- Osd Oscilloscope SchematicDocument1 pageOsd Oscilloscope SchematicSebastian Costa100% (1)
- 95-Wat Laptop PSU 12V in - 19V 5A Out PDFDocument7 pages95-Wat Laptop PSU 12V in - 19V 5A Out PDFArina ScăunașuNo ratings yet
- AVR Assembly Tutorial CompleteDocument611 pagesAVR Assembly Tutorial CompleteTanvir Hussain100% (27)
- RS-485 Transceiver Tutorial: 1 IntersilDocument8 pagesRS-485 Transceiver Tutorial: 1 Intersilpiyushpandey100% (3)
- PIC16F877 Timer Modules Tutorials - Timer1Document4 pagesPIC16F877 Timer Modules Tutorials - Timer1RamKumar100% (1)
- DHTDocument9 pagesDHTNoman Jabbar100% (2)
- About Usb InterfaceDocument6 pagesAbout Usb InterfaceSantosh Kumar100% (1)
- Temperature Controlled Fan Using PIC 16F877A - GadgetronicxDocument8 pagesTemperature Controlled Fan Using PIC 16F877A - Gadgetronicxdevchandar100% (1)
- PID LibraryDocument2 pagesPID LibraryFathi ArsalanNo ratings yet
- Build Your Own USB/PC-Based OscilloscopeDocument44 pagesBuild Your Own USB/PC-Based Oscilloscopeuimarin14No ratings yet
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument28 pagesAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- PIC16f877a TimerDocument9 pagesPIC16f877a Timerjohn moron100% (2)
- High-Performance PIC24 Microcontroller Family: 16-Bit MicrocontrollersDocument6 pagesHigh-Performance PIC24 Microcontroller Family: 16-Bit MicrocontrollersptkienNo ratings yet
- Mplab X Ide: Be Sure To Check Out Microchip's New Integrated Development EnvironmentDocument3 pagesMplab X Ide: Be Sure To Check Out Microchip's New Integrated Development Environmentescorp100% (1)
- JSN SR04T 2.0Document4 pagesJSN SR04T 2.0JederVieira100% (1)
- Scrolling Message Display - Project Report - Nov 15, 2011Document71 pagesScrolling Message Display - Project Report - Nov 15, 2011Arun Arya33% (3)
- Esr LCR r2d2Document6 pagesEsr LCR r2d2Toñi Lopez Vilches100% (1)
- Introduction to MicrocontrollersDocument51 pagesIntroduction to MicrocontrollersArief Iskandar100% (1)
- Q Choose PicDocument72 pagesQ Choose Pichmltdt9221100% (2)
- Driver Circuits - PowerGuru - Power Electronics Information PortalDocument5 pagesDriver Circuits - PowerGuru - Power Electronics Information PortaldevchandarNo ratings yet
- LABVIEW OverviewDocument24 pagesLABVIEW OverviewbigirimwNo ratings yet
- Projects & Tutorials: DIY Stepper ControllerDocument2 pagesProjects & Tutorials: DIY Stepper ControllerRafi Andanawari Drajat100% (1)
- 1602 Arduino Shield LCD PDFDocument6 pages1602 Arduino Shield LCD PDFpeccerini100% (1)
- Testing VRMDocument6 pagesTesting VRMdonettNo ratings yet
- Reverse Engineering a Discrete Component Switch-Mode Power SupplyDocument6 pagesReverse Engineering a Discrete Component Switch-Mode Power Supplysafet100% (2)
- EDC Lab ManualDocument33 pagesEDC Lab ManualECE dept sietNo ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- 1KM Power FM TransmitterDocument5 pages1KM Power FM TransmitterAntonio José Montaña Pérez de Cristo100% (1)
- 9-Serial Comm (Autosaved)Document48 pages9-Serial Comm (Autosaved)M ADNAN Z100% (1)
- Automatic Tempearture Controlled FanDocument13 pagesAutomatic Tempearture Controlled FanAbin BabyNo ratings yet
- Build A PIC Beacon Clock Pt1Document7 pagesBuild A PIC Beacon Clock Pt1RastekHI100% (2)
- LM - Build An ARM-based Embedded Web ServerDocument46 pagesLM - Build An ARM-based Embedded Web ServerEmadElDinEzzatNo ratings yet
- Can Bus SCHDocument1 pageCan Bus SCHhoangdai100% (3)
- 16 Design IdeasDocument7 pages16 Design Ideasmailnehru8955100% (2)
- PIC of An IDer PDFDocument5 pagesPIC of An IDer PDFronaldbolorbaral8809100% (1)
- Electronics & Communication Engineering Interview QuestionsDocument11 pagesElectronics & Communication Engineering Interview QuestionsPavan Kumar ThopaNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product SpecificationAlexander TkachenkoNo ratings yet
- Power Electronics Question Paper EC-604Document2 pagesPower Electronics Question Paper EC-604Jayesh JoshiNo ratings yet
- BITS Pilani: INSTR F311: Electronic Instruments and Instrumentation Technology Digital MetersDocument30 pagesBITS Pilani: INSTR F311: Electronic Instruments and Instrumentation Technology Digital MetersNiharikaNo ratings yet
- Jeppiaar Engineering College: Question BankDocument40 pagesJeppiaar Engineering College: Question BankPAULSELVINo ratings yet
- Tae 2453Document8 pagesTae 2453Her RiosNo ratings yet
- Digital Electronics-SyllabusDocument2 pagesDigital Electronics-Syllabussaravya RajNo ratings yet
- ECE 405 Digital Data Lab Report 01: Signal Sum AnalysisDocument7 pagesECE 405 Digital Data Lab Report 01: Signal Sum AnalysisFelipe Dias100% (1)
- In Fulfillment of Diploma in Computer Engineering Of: Shri Swami Vivekanand Shikshan SansthaDocument7 pagesIn Fulfillment of Diploma in Computer Engineering Of: Shri Swami Vivekanand Shikshan SansthaRingtones WorldsNo ratings yet
- 1448249900UG - EE 2209 - Power Amplifier - 20140201 (Compatibility Mode)Document31 pages1448249900UG - EE 2209 - Power Amplifier - 20140201 (Compatibility Mode)Tanvir Ahmed MunnaNo ratings yet
- BJT Amplifier DC Analysis & Operating PointsDocument51 pagesBJT Amplifier DC Analysis & Operating PointsMuhammad AwaisNo ratings yet
- Tutorial 1 9Document32 pagesTutorial 1 9Momo LuluNo ratings yet
- Basic Flip Flop Circuits ExplainedDocument7 pagesBasic Flip Flop Circuits ExplainedFord StephenNo ratings yet
- Unit - 5 8051 Interfacing Andapplications Interfacing of 8051with: Analog Sensors, Keypad & LCD Display, ADC, DAC, DC Motor. LCD InterfacingDocument31 pagesUnit - 5 8051 Interfacing Andapplications Interfacing of 8051with: Analog Sensors, Keypad & LCD Display, ADC, DAC, DC Motor. LCD InterfacingNusret YılmazNo ratings yet
- Project 1Document5 pagesProject 1athomeNo ratings yet
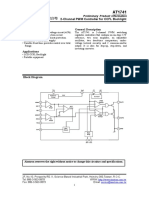
- 2-Channel PWM Controller for CCFL Backlight RegulationDocument11 pages2-Channel PWM Controller for CCFL Backlight RegulationMorales Avila NiorgeNo ratings yet
- FocDocument11 pagesFocSL PRASAD KOLLURUNo ratings yet
- Coal Lab 2Document9 pagesCoal Lab 2AbdurRehmanNo ratings yet
- Lecture 4-BJT Frequency Response-New!!Document53 pagesLecture 4-BJT Frequency Response-New!!Muqthiar Ali100% (3)
- L05 CCE 301 Special Diode CircuitsDocument15 pagesL05 CCE 301 Special Diode CircuitsZakaria MtairekNo ratings yet
- Kenwood Ts 440s Service ManualDocument116 pagesKenwood Ts 440s Service Manualcaba1233No ratings yet
- Experiment Number 7 Phase Locked Loop (PLL) : The Lock RangeDocument4 pagesExperiment Number 7 Phase Locked Loop (PLL) : The Lock RangeNikita KanchanNo ratings yet
- Lic PDFDocument83 pagesLic PDFVijayanand SNo ratings yet
- Cascade Amplifier CircuitDocument4 pagesCascade Amplifier Circuit4011 Harshada MohiteNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product Specificationvali2daduicaNo ratings yet
- RESIT MEASUREMENT SCIENCE 2012 EXAMDocument9 pagesRESIT MEASUREMENT SCIENCE 2012 EXAMAxel PalaciosNo ratings yet
- FM Modulation and Demodulation Using PLL IC CD4046Document8 pagesFM Modulation and Demodulation Using PLL IC CD4046Mohamed Bilal50% (2)
- EE 151 Presentation - pptx-1Document240 pagesEE 151 Presentation - pptx-1NhyiraNo ratings yet
- Traffic Light Controller Using 555 Timer CircuitDocument3 pagesTraffic Light Controller Using 555 Timer CircuitPartha SarathyNo ratings yet
- DatasheetDocument7 pagesDatasheetDarcio TolottiNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsFrom EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsRating: 4.5 out of 5 stars4.5/5 (49)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneFrom EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneNo ratings yet
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet