You might also like
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109From EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109No ratings yet
- DinamoDocument49 pagesDinamoJulio Guerra C.No ratings yet
- Examen MaquinasDocument15 pagesExamen MaquinasiortizpNo ratings yet
- Construccion de La Maquina DCDocument10 pagesConstruccion de La Maquina DCPinche HeroHNNo ratings yet
- Circuitos R-L y R-C SerieDocument7 pagesCircuitos R-L y R-C SerieAna SimonNo ratings yet
- Práctica 3 - Encendido y Apagado de Un TiristorDocument11 pagesPráctica 3 - Encendido y Apagado de Un TiristorBrandon VallejoNo ratings yet
- Unidad 3 Parte 2 RectificadoresDocument38 pagesUnidad 3 Parte 2 RectificadoresBelfor Luis Vilca Lecaros100% (1)
- Ensayo en Cortocircuito de Transformadores MonofasicosDocument8 pagesEnsayo en Cortocircuito de Transformadores MonofasicosJuanJavierFloresFernandez0% (1)
- GeneradorDocument8 pagesGeneradorHelvin Loren Campos CastilloNo ratings yet
- Informe Conmutacion NaturalDocument5 pagesInforme Conmutacion NaturalLeo FloresNo ratings yet
- Motor DahlanderDocument2 pagesMotor DahlanderflavioscrNo ratings yet
- Devanados y ConmutaciónDocument35 pagesDevanados y ConmutaciónSamuel Santos Flores100% (1)
- Maquinas de CD e InducciónDocument85 pagesMaquinas de CD e InducciónAleex RodriguezNo ratings yet
- JBDocument21 pagesJBAna LucyNo ratings yet
- 3.2 Obtención Del Circuito Equivalente Del Generador Síncrono-Monofásico y TrifásicoDocument14 pages3.2 Obtención Del Circuito Equivalente Del Generador Síncrono-Monofásico y TrifásicoAntonio De Jesús NavaNo ratings yet
- Relés Electromecánicos de InducciónDocument9 pagesRelés Electromecánicos de InducciónManuel David Castiblanco GuillenNo ratings yet
- Motores Generadores TransformadoresDocument47 pagesMotores Generadores TransformadoresBertur FlurNo ratings yet
- Informe Lab4 3817 Barreno Herrera Montenegro PDFDocument28 pagesInforme Lab4 3817 Barreno Herrera Montenegro PDFMikael MontenegroNo ratings yet
- Lab 3. MOTOR TRIFÁSICO DE INDUCCIÓNDE ROTOR DEVANADODocument5 pagesLab 3. MOTOR TRIFÁSICO DE INDUCCIÓNDE ROTOR DEVANADOVictor EstradaNo ratings yet
- Máquinas Eléctricas - 5ta Ed - Editable 1 PDFDocument98 pagesMáquinas Eléctricas - 5ta Ed - Editable 1 PDFAnonymous V6y1QL6hnNo ratings yet
- Funcion TrapeoidalDocument30 pagesFuncion TrapeoidalCristian DominguezNo ratings yet
- Ft-Me IiDocument3 pagesFt-Me IiBryan Roy Cordova GomezNo ratings yet
- Maquinas Eléctricas 1 - Cálculo Voltaje InducidoDocument3 pagesMaquinas Eléctricas 1 - Cálculo Voltaje InducidoAlex Cruz PorcelNo ratings yet
- 4 Multivibradores PDFDocument27 pages4 Multivibradores PDFNICANOR KANA GAMARRANo ratings yet
- Ensayo en VacioDocument3 pagesEnsayo en Vaciowill villcaNo ratings yet
- Ejercicio 6. Mando para El Arranque Con Resistencias EstatoricasDocument8 pagesEjercicio 6. Mando para El Arranque Con Resistencias EstatoricasMARIO0% (1)
- Ensayo de Corto Circuito UnacDocument8 pagesEnsayo de Corto Circuito UnacCesar A. Quispe VargasNo ratings yet
- Elementos de La Maquina CCDocument10 pagesElementos de La Maquina CCnavita_2727No ratings yet
- Contadores digitales: divisores de frecuencia y circuitos integradosDocument17 pagesContadores digitales: divisores de frecuencia y circuitos integradosmadura123No ratings yet
- Nerador Con Excitación SerieDocument9 pagesNerador Con Excitación SerieMiguel AngelNo ratings yet
- Diagrama de Heyland 2013Document9 pagesDiagrama de Heyland 2013Andrés David Rodriguez SgolastraNo ratings yet
- Auto transformador 750VADocument8 pagesAuto transformador 750VAtarazona levanoNo ratings yet
- Maquina Asincrona Laboratorio #06Document13 pagesMaquina Asincrona Laboratorio #06gasper221No ratings yet
- Diodos Con Cargas RC y RLDocument6 pagesDiodos Con Cargas RC y RLraulpalacioNo ratings yet
- Configuraciones de Generadores DCDocument4 pagesConfiguraciones de Generadores DCAndrea LuzónNo ratings yet
- Informe Tecnico de Balanza Con Motor Brushless-1Document23 pagesInforme Tecnico de Balanza Con Motor Brushless-1Leonardo RomoNo ratings yet
- Bobinados ImbricadosDocument13 pagesBobinados ImbricadosCaro MdzNo ratings yet
- Experimento 29Document3 pagesExperimento 29samuelNo ratings yet
- Arranque y Frenado de Maquinas ElectricasDocument13 pagesArranque y Frenado de Maquinas ElectricasZhandra AgüiñoNo ratings yet
- Polaridad en TransformadoresDocument4 pagesPolaridad en TransformadoresaugustoluisNo ratings yet
- Motores de Corriente Continua TrabajoDocument17 pagesMotores de Corriente Continua TrabajoJose Gabriel Torrealba OropezaNo ratings yet
- Me Ii 03 Teoria de Bobinados TrifásicosDocument13 pagesMe Ii 03 Teoria de Bobinados TrifásicosRyaw R LopezNo ratings yet
- Motor Trifásico AsíncronoDocument18 pagesMotor Trifásico AsíncronoGerman Ehulech100% (1)
- Pauta Tarea 1Document7 pagesPauta Tarea 1Javier PalmaNo ratings yet
- Maq Sincrona 2010Document137 pagesMaq Sincrona 2010maximum1130% (2)
- Máquinas eléctricas DCDocument11 pagesMáquinas eléctricas DCFernando Mazas Hernandez100% (1)
- El ConmutadorDocument7 pagesEl ConmutadorMateo Benavides MartinezNo ratings yet
- Fuerza Contraelectromotriz Inducida en Un MotorDocument5 pagesFuerza Contraelectromotriz Inducida en Un MotorJohan Ccanchillo TinucoNo ratings yet
- Laboratorio N°10-Transformadores MatlabDocument63 pagesLaboratorio N°10-Transformadores MatlabJose Augusto Ancasi HuamanNo ratings yet
- Rectificadores Trifásicos CA - CCDocument34 pagesRectificadores Trifásicos CA - CCEdwin BandaNo ratings yet
- Barras Inclinadas en Rotores de Jaula de ArdillaDocument2 pagesBarras Inclinadas en Rotores de Jaula de ArdillaRoberto Carlos Urquiola Ayala0% (1)
- Control DC motorDocument39 pagesControl DC motorAlexis HerreraNo ratings yet
- Problemas de Maquinas de Corriente ContinuaDocument15 pagesProblemas de Maquinas de Corriente ContinuaHenry FelicesNo ratings yet
- MOTOR de RepulsionDocument19 pagesMOTOR de RepulsionJuan Carlos Pozo50% (4)
- Maquinas CC construcciónDocument15 pagesMaquinas CC construcciónDamelis PerezNo ratings yet
- Informe de Maquinas CCDocument20 pagesInforme de Maquinas CCviko...No ratings yet
- Construccion Motor CDDocument15 pagesConstruccion Motor CDOliversinNo ratings yet
- Laboratorio de Maquinas Eléctricas IiDocument11 pagesLaboratorio de Maquinas Eléctricas Iifer6669993No ratings yet
- Maquinas ElectricasDocument43 pagesMaquinas ElectricasRafaLara100% (1)
- Generadores SincronosDocument8 pagesGeneradores Sincronoslioxluixx0% (1)
- PC1 - Ingenieria SismoresistenteDocument8 pagesPC1 - Ingenieria Sismoresistentevictor anguloNo ratings yet
- Perfil profesional Ingeniero Mecánico ElectricistaDocument15 pagesPerfil profesional Ingeniero Mecánico ElectricistaConnie RodriguezNo ratings yet
- MÁQUINAS ELÉCTRICAS..cpDocument2 pagesMÁQUINAS ELÉCTRICAS..cpPris SmrNo ratings yet
- Armstrong N101spanishDocument54 pagesArmstrong N101spanishAndres Gudino100% (2)
- Bel Ray IndustrialDocument21 pagesBel Ray IndustrialDaniel ColinsNo ratings yet
- Diagramas de Cuerpo Libre - Plano Inclinado - Peso - Fuerza - Rozamiento. Rev 2Document10 pagesDiagramas de Cuerpo Libre - Plano Inclinado - Peso - Fuerza - Rozamiento. Rev 2rseclen100% (1)
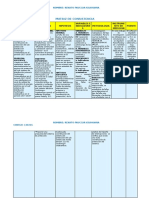
- Matriz de ConsistenciaDocument2 pagesMatriz de ConsistenciaPauccarRenato100% (1)
- Planificacion Anual para El Tercer Grado de PrimariaDocument32 pagesPlanificacion Anual para El Tercer Grado de PrimariajoseNo ratings yet
- Michael TalbotDocument3 pagesMichael TalbotErwin Leonardo VivancosNo ratings yet
- Distribuciones de ProbabilidadDocument30 pagesDistribuciones de ProbabilidadItzel MartinezNo ratings yet
- Molienda y TamizadoDocument16 pagesMolienda y TamizadoRicardo Josè Carhuavilca SolanoNo ratings yet
- Solucionario InecuacionesDocument12 pagesSolucionario InecuacionesleonerAQpNo ratings yet
- Bazan Joen Vulnerabilidad Sismica Confinada Cajamarca PDFDocument95 pagesBazan Joen Vulnerabilidad Sismica Confinada Cajamarca PDFJimmy Mina LanchoNo ratings yet
- 2-Sistema de Suministro EléctricoDocument5 pages2-Sistema de Suministro EléctricoJorgeChavezOrdoñezNo ratings yet
- Perdida parcial de la fuerza de presforzadoDocument17 pagesPerdida parcial de la fuerza de presforzadoJimmy FabrizioNo ratings yet
- Ventilación - CalsalsDocument10 pagesVentilación - CalsalsLuis JJNo ratings yet
- Patologia y Control de La Envolvente HorizontalDocument14 pagesPatologia y Control de La Envolvente HorizontalLeonardo Lopez100% (1)
- Ensayo TorsionDocument13 pagesEnsayo TorsionMercyGirónNo ratings yet
- TP 2 Lucas GraiñoDocument8 pagesTP 2 Lucas GraiñoLucas GrainoNo ratings yet
- Semestral San Marcos - Geometría Semana 15Document8 pagesSemestral San Marcos - Geometría Semana 15PAUL ANTONIO HUAMANI LOPEZNo ratings yet
- Operating Manual Rotary Tissue Processor (ESP)Document23 pagesOperating Manual Rotary Tissue Processor (ESP)andreapasitos8340No ratings yet
- La Curaduria en Las Artes Visuales - Meta-Autoria y PosproduccionDocument18 pagesLa Curaduria en Las Artes Visuales - Meta-Autoria y PosproduccionjonfeldNo ratings yet
- Activación Glandula PinealDocument3 pagesActivación Glandula PinealMabel BurnsNo ratings yet
- Previo 7 Circuitos Eléctricos IDocument7 pagesPrevio 7 Circuitos Eléctricos IFranz Lozano Torres100% (1)
- Informe de MantenimientoDocument4 pagesInforme de MantenimientoEmilio PaucarimaNo ratings yet
- Auditorio BlackBerry México DF ubicación característicasDocument43 pagesAuditorio BlackBerry México DF ubicación característicasEstefaniaCevallosNo ratings yet
- Introduccion A Variables Aleatorias ContinuasDocument23 pagesIntroduccion A Variables Aleatorias ContinuasFreddy Rodriguez QuinteroNo ratings yet
- Matematicas Recurso Bloque008 1Document1 pageMatematicas Recurso Bloque008 1Naomi BenitezNo ratings yet
- Diseño de Una Maquina Dobladora Mecanica de Barras de Construccion Astm 615 Grado 60Document61 pagesDiseño de Una Maquina Dobladora Mecanica de Barras de Construccion Astm 615 Grado 60BRIAN JESUS TORRES BRIONESNo ratings yet
- Cicloconvertidores TrifásicosDocument10 pagesCicloconvertidores TrifásicosAlfredo Forton PeñaNo ratings yet