You might also like
- Programming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationFrom EverandProgramming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationRating: 2.5 out of 5 stars2.5/5 (5)
- Industry Process Automation Using Programmable SwitchingDocument5 pagesIndustry Process Automation Using Programmable SwitchingMd. Arif Ahmed100% (1)
- Digital Electronics with Arduino: Learn How To Work With Digital Electronics And MicroControllersFrom EverandDigital Electronics with Arduino: Learn How To Work With Digital Electronics And MicroControllersRating: 5 out of 5 stars5/5 (1)
- Product Development-Solar Power BankDocument9 pagesProduct Development-Solar Power BankAlaa Makki100% (1)
- Control System Based On PLC For WindingDocument4 pagesControl System Based On PLC For WindinghanzrizNo ratings yet
- Code Composer Studio Operation ManualDocument16 pagesCode Composer Studio Operation ManualAbinet TesfayeNo ratings yet
- Eye BlinkDocument31 pagesEye BlinkPoorva Gupta67% (3)
- Wireless Multigas Detector Unit PDFDocument39 pagesWireless Multigas Detector Unit PDFIkechukwu Isaac100% (1)
- Ef Lab 4Document12 pagesEf Lab 4thevand11No ratings yet
- Lab Report 3 - Transistor As A SwitchDocument5 pagesLab Report 3 - Transistor As A Switchアベルジョン パランNo ratings yet
- Manual PLC FestoDocument77 pagesManual PLC Festoul15e5100% (1)
- Analog and Digital ElectronicsDocument1 pageAnalog and Digital Electronicsveeramaniks408No ratings yet
- Automatic Bathroom Light PDFDocument1 pageAutomatic Bathroom Light PDFJan Ahmed0% (1)
- Transducer Engineering Lab ManualDocument44 pagesTransducer Engineering Lab Manualspgmaniarunagiri100% (2)
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Document30 pagesDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाNo ratings yet
- Microprocessor Based Traffic Light Control SystemDocument10 pagesMicroprocessor Based Traffic Light Control Systemramjee26No ratings yet
- Report On Security System Switcher (Oct 2011)Document19 pagesReport On Security System Switcher (Oct 2011)scribdsunshineNo ratings yet
- Social Responsibilities of BusinessDocument23 pagesSocial Responsibilities of BusinessHarishNo ratings yet
- Dee3071 Electronic Computer Aided Design (Ecad) - SDocument6 pagesDee3071 Electronic Computer Aided Design (Ecad) - Skshika meganathanNo ratings yet
- Lecture 4 Diode Circuits NewDocument76 pagesLecture 4 Diode Circuits NewShari Bin MappiasiNo ratings yet
- Lab Session 2 Power Cable: ObjectiveDocument5 pagesLab Session 2 Power Cable: ObjectiveHermain Fayyaz KarimNo ratings yet
- Design and Construction of A Electronics Trainer KitDocument42 pagesDesign and Construction of A Electronics Trainer KitToheebdareNo ratings yet
- Dynamic Traffic Light Control Using Microcontroller: Industrial and Control EngineeringDocument49 pagesDynamic Traffic Light Control Using Microcontroller: Industrial and Control EngineeringTalemaNo ratings yet
- It Workshop Record Lab ManualDocument78 pagesIt Workshop Record Lab ManualRohit ReddyNo ratings yet
- Project On Full Wave Rectifier!Document51 pagesProject On Full Wave Rectifier!Aniket DasNo ratings yet
- Project PlanDocument12 pagesProject Plan1deakz4lu7geNo ratings yet
- Traffic Light SystemDocument25 pagesTraffic Light SystemiykedigitalNo ratings yet
- Design FIR FilterDocument22 pagesDesign FIR Filtersaran52_eceNo ratings yet
- Single Phase Full Wave Voltage Multiplier PDFDocument3 pagesSingle Phase Full Wave Voltage Multiplier PDFJoshua Amiel javines0% (1)
- Communication Stream (Traffic Light) PDFDocument9 pagesCommunication Stream (Traffic Light) PDFZelalem BirhanuNo ratings yet
- An Efficient Approach For Short Term Load ForecastingDocument21 pagesAn Efficient Approach For Short Term Load Forecastinggsaibaba100% (1)
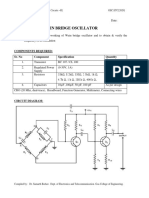
- Expt 5 - Wein Bridge Oscillator (2020)Document3 pagesExpt 5 - Wein Bridge Oscillator (2020)samarthNo ratings yet
- Wolkite University College of Engineering and Technology Department of Electric and Computer EngineeringDocument8 pagesWolkite University College of Engineering and Technology Department of Electric and Computer EngineeringAnonymous ZMBiaO6No ratings yet
- Automatic College Bell REPORTDocument61 pagesAutomatic College Bell REPORTDebashishParida100% (1)
- Embedded Lab 3 ReportDocument11 pagesEmbedded Lab 3 ReportMohd Amer100% (1)
- Sun Tracking Solar PanelDocument11 pagesSun Tracking Solar PaneldanNo ratings yet
- Auto Intensity Control of Street LightDocument53 pagesAuto Intensity Control of Street LightNikhith ReddyNo ratings yet
- Industrial Electronics Laboratory Group Iii ECE 4-1Document11 pagesIndustrial Electronics Laboratory Group Iii ECE 4-1MaimaiFabilonaDumalaogNo ratings yet
- Lab 6 ADCDocument6 pagesLab 6 ADCYaz PuteraNo ratings yet
- Monitoring and Control of Solar Power System Using Reliance SCADADocument4 pagesMonitoring and Control of Solar Power System Using Reliance SCADAEditor IJTSRDNo ratings yet
- Fingerprint Based Bank Locker SystemDocument26 pagesFingerprint Based Bank Locker Systemrockfloyd75% (8)
- Blue Print-1Document37 pagesBlue Print-1Abenezer BekeleNo ratings yet
- Untitled 1Document109 pagesUntitled 1Ritesh SharmaNo ratings yet
- ST 2651Document94 pagesST 2651Shrikant Jahagirdar50% (2)
- EEE 805 Assignment Questions For Chapter 20Document11 pagesEEE 805 Assignment Questions For Chapter 20ayeniNo ratings yet
- 21425-9021-Digital Electronics Lab ManualDocument57 pages21425-9021-Digital Electronics Lab ManualAravind BalasundaramNo ratings yet
- Deployment Considerations in Optical NetworksDocument19 pagesDeployment Considerations in Optical Networksgk_gbu0% (1)
- DSP 18eel67 FinalDocument94 pagesDSP 18eel67 FinalBlackopsNo ratings yet
- Lab 9 Inheritance BESE-11Document7 pagesLab 9 Inheritance BESE-11Eisha FatimaNo ratings yet
- PZ Ssa 8 J5 NJ G2 V 1 I T6 FWJ STB SXZKs U6 X WFK 34 R WDWDocument5 pagesPZ Ssa 8 J5 NJ G2 V 1 I T6 FWJ STB SXZKs U6 X WFK 34 R WDWAshlesha HatagleNo ratings yet
- Automatic Ambulance Rescue SystemDocument139 pagesAutomatic Ambulance Rescue SystemAsok Kumar100% (1)
- Final Year Project PDFDocument26 pagesFinal Year Project PDFNilayan SamantaNo ratings yet
- Accident Driver Assistance System WithDocument70 pagesAccident Driver Assistance System WithFATHIMA HAKKEEMNo ratings yet
- Car ParkingDocument65 pagesCar Parkingmaniblp100% (1)
- Smart Digital Bi-Directional Visitors Counter Based On Iot: Journal of Physics: Conference SeriesDocument8 pagesSmart Digital Bi-Directional Visitors Counter Based On Iot: Journal of Physics: Conference SeriesMaxamed YusufNo ratings yet
- Embedded Design Training ReportDocument52 pagesEmbedded Design Training ReportAshish YadavNo ratings yet
- Project Report On ATM SystemDocument55 pagesProject Report On ATM SystemJaydip Patel100% (3)
- Yabesh PW of CS XIDocument35 pagesYabesh PW of CS XIYabesh RaiNo ratings yet
- Group QRDocument6 pagesGroup QRKevo KyforceNo ratings yet
- E NoteCMP102358Document23 pagesE NoteCMP102358JAMES CHAGBENo ratings yet
- AMC-KM CA 000246 RevF EN-mobile PDFDocument220 pagesAMC-KM CA 000246 RevF EN-mobile PDFray rayNo ratings yet
- Computer Applications Technology: Teacher's GuideDocument220 pagesComputer Applications Technology: Teacher's GuideMelanieNo ratings yet
- Microsoft Windows 98 Second Edition README For Tips and Tricks, April 1999Document8 pagesMicrosoft Windows 98 Second Edition README For Tips and Tricks, April 1999scriNo ratings yet
- Coursera - Programa Curso Python Basics - University of MichiganDocument3 pagesCoursera - Programa Curso Python Basics - University of MichiganANGELA VARGASNo ratings yet
- E BankingDocument65 pagesE Bankingzeeshan shaikh100% (1)
- Adapting Musical Activities For Persons With DisabilitiesDocument5 pagesAdapting Musical Activities For Persons With DisabilitiesMinas TheodorakisNo ratings yet
- DAE Brochure - 2022Document52 pagesDAE Brochure - 2022Wsi Andrea ChlebikovaNo ratings yet
- Blender Sculpting Cheat Sheet 2.0 ColorDocument3 pagesBlender Sculpting Cheat Sheet 2.0 Colorniklim360No ratings yet
- Removing Undesired Periodic DataDocument10 pagesRemoving Undesired Periodic DataRatna Giridhar KavaliNo ratings yet
- SIC MCQ LatestDocument31 pagesSIC MCQ LatestSuraj Maurya100% (1)
- RCM Business - The New Marketing Plan BookDocument32 pagesRCM Business - The New Marketing Plan BookSamir K Mishra93% (70)
- Case Study - Refreshing A CS 10 Test Development System With Fresh Production DataDocument106 pagesCase Study - Refreshing A CS 10 Test Development System With Fresh Production DataMarina NaumenkoNo ratings yet
- E 24713Document350 pagesE 24713Jai KanthNo ratings yet
- As01 Vs As91Document6 pagesAs01 Vs As91Manas Kumar SahooNo ratings yet
- Autonomous CarDocument28 pagesAutonomous CarNagabhushana0% (1)
- SD-SDI Quick Start Guide 1.0Document16 pagesSD-SDI Quick Start Guide 1.0Edgar FloresNo ratings yet
- Copterlab - Alexmos Brushless Gimbal Documentation SimpleBGC EN PDFDocument18 pagesCopterlab - Alexmos Brushless Gimbal Documentation SimpleBGC EN PDFfull gas tvNo ratings yet
- Wincor Nixdorf CMD V4Document112 pagesWincor Nixdorf CMD V4digger70100% (3)
- RRU3808 Hardware Description (09) (PDF) - enDocument32 pagesRRU3808 Hardware Description (09) (PDF) - enTarik BoubihiNo ratings yet
- Assessing The Impact of Internet of Everything Technologies in FootballDocument14 pagesAssessing The Impact of Internet of Everything Technologies in FootballAlkım KarantayNo ratings yet
- Operation Manual PDFDocument492 pagesOperation Manual PDFBayarkhuu Sukhbaatar100% (2)
- Microsoft AI Cloud Partner Program Benefits GuideDocument38 pagesMicrosoft AI Cloud Partner Program Benefits GuideOTHONIEL RPGNo ratings yet
- Apachecon Advanced Oo Database Access Using PdoDocument37 pagesApachecon Advanced Oo Database Access Using PdoAndreaaSimoesNo ratings yet
- Strengt of Material05Document149 pagesStrengt of Material05kamalwaxNo ratings yet
- BSC - IT SyllDocument31 pagesBSC - IT SyllSushant TripathiNo ratings yet
- Internet Based EDIDocument55 pagesInternet Based EDIAbin KurianNo ratings yet
- Transitioning From Oracle Solaris 10 To Oracle Solaris 11.4Document10 pagesTransitioning From Oracle Solaris 10 To Oracle Solaris 11.4errr33No ratings yet
- SparesManagement Parts Sourcing and OrderingDocument61 pagesSparesManagement Parts Sourcing and OrderingWilliam VelascoNo ratings yet
- Exercise 12 TRAINING DESIGN-ICTDocument3 pagesExercise 12 TRAINING DESIGN-ICTBen Erick CompuestoNo ratings yet
- الأطعمة المحللة والمحرمةDocument39 pagesالأطعمة المحللة والمحرمةIni FarhanNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102No ratings yet
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesFrom EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFFrom EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFNo ratings yet
- Programming with STM32: Getting Started with the Nucleo Board and C/C++From EverandProgramming with STM32: Getting Started with the Nucleo Board and C/C++Rating: 3.5 out of 5 stars3.5/5 (3)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertFrom EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertRating: 3.5 out of 5 stars3.5/5 (6)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (2)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesFrom EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesNo ratings yet
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideFrom EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideRating: 1 out of 5 stars1/5 (1)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (2)
- Real-Time UML Workshop for Embedded SystemsFrom EverandReal-Time UML Workshop for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (2)
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsFrom EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsNo ratings yet
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XFrom EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XRating: 5 out of 5 stars5/5 (1)