Professional Documents
Culture Documents
Fdcs Manual Stesalit
Uploaded by
Kishore KumarOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Fdcs Manual Stesalit
Uploaded by
Kishore KumarCopyright:
Available Formats
Fault Diagnostics and Control System
Stesalit Limited
Index
1. 2. 3. 4. 5. 6. 7. System Overview Safety Design Considerations System Architecture System configuration System Highlights Relay Logic Description Hardware Description a. Processor Module b. Multi-function Module c. Analog Input Module d. Signal Conditioning Module e. Status Input Module f. Relay Output Module g. Display Module h. Power Supply Module Software Architecture and Description Interconnection Details a. FDCS Unit to Terminal SB b. FDCS Unit to Display unit c. FDCS Unit to Signal conditioning unit d. Signal Conditioning Unit to SB Terminal e. FDCS Unit to PC Wiring Details for FDCS-9648 of WAG-7 Locomotive List of Input/Outputs Trouble shooting Procedure of FDCS 9648 Operation of the Display panel Fault Messages
8. 9.
10. 11. 12. 13. 14.
Page 1 of 69
Fault Diagnostics and Control System
Stesalit Limited
1. System Overview
Existing electric locomotives working on Indian Railways are having conventional control and interlocking of its different circuits for its safe operation. These are achieved through an array of Electro-mechanical and Electro-pneumatic relays and contractors. Such relay-based control involves a large amount of cabling and a number of interlocking contacts and interconnections, which are not only maintenance intensive but are unreliable too.
Interlocking of relays inside the loco was used to have some predefined sequence of operation for proper operation of the different functional blocks of the loco. For this purpose, interlocking of the relays are used to derive some combinatorial, sequential and delay logic circuits Other than this, the purpose of the relays is to ensure the safety of the loco against malfunctioning of the various electrical equipments due to their different modes of failures. Further, failure of the relay contacts often makes the situation more complicated.
In the existing loco, in case of any fault, it is very difficult to locate the actual root cause. This not only increases the down-time of the locos, its servicing and maintenance also becomes difficult. Identification of the exact fault condition and its correct maintenance is important to maintain the healthy condition of loco.
The objective of the project MICRO PROCESSOR BASED CONTROL AND FAULT DIAGNOSTIC SYSTEM is primarily to locate the faults for its correct maintenance. Another objective of the system is to replace some existing relays and its corresponding interlocking logic with software to reduce the cost and complexity of wiring and to add certain diagnostic features for better maintenance of the loco.
Page 2 of 69
Fault Diagnostics and Control System
Stesalit Limited
2. Design Considerations
The heart of the system is obviously the microprocessor, which acquires the status of the relays and some analog parameters, processes the information and issues control outputs to operate and control the various electrical equipments inside the loco. The purpose of the loco is to run passenger or goods train from one location to another. Hence, safety of the passengers is one of the prime considerations for all the interlocking, be it derived through relays or through electronics & software. Failure to ensure its safe operation may also lead to loss of property.
Implementation of such protection and operational logics through electronic hardware and software is much more critical because of the numerous failure modes that are observed with such systems. Although the basic objective of such system is quite simple, one needs to ensure the correctness of the input data, its processing and the output status with a certain degree of confidence. Components might fail as part of its inherent characteristics. But it is essential to ensure that in case of any malfunction due to a failure, the control system does not lead the loco to an unsafe condition. A safety level for such systems have been designated by various international bodies and is typically 107 to 10-8 / hour (Safety Integrity Level, SIL3). With single processor system, the level that can be achieved is typically 10-6 to 10-7 / hour or even worse depending on the design methodology. Safety level of such system is considerably enhanced by the use of testability at various levels and dual hardware redundancy in the hardware. Use of hot-standby processor does not necessarily enhance the safety level since there are quite a few failure modes, which a single processor system fails to identify and subsequently lead to a safe condition. Availability is another important requirement of such system since due to any failure if the system ceases to work, there will be disruption of service, which may lead to inconvenience to the passengers, although it may be safe.
Page 3 of 69
Fault Diagnostics and Control System
Stesalit Limited
Thus considering both safety and availability of the equipment, the architecture adapted in the present system is 2-out-of-2 operations with full hardware redundancy in the input and processor level. Output drive is combined for both since it would the same relay or contactor. However, each of the subsystem has its own redundancy and testability to ensure its individual function. Normal operation will be carried out based on 2-out-of-2 voting in taking all the logic processing and vital decisions. However, in case of a failure in one set of hardware, the second set would continue its operation but with an alarm, ensuring a certain degree of safety.
Redundancy alone does not guarantee fail-safe operation of equipment. For a redundant system to function properly in presence of a fault, the redundancy must be managed properly. Redundancy management issues are closely interrelated to ensure the reliability, availability and safety issues for such systems. One of the key issues for such architecture is the synchronization of the two processors so that both of them get the same data and processes the output for the 2-out-of-2 voting process.
3.
System Architecture
The basic architecture adapted for the Fault Diagnostic and Control System is shown in Fig. I. Each individual processor has its own digital and analog input cards. Each status input is read by each processor through two separate optoisolators to ensure the correctness of input data individually through dual redundancy. Correctness of analog inputs is assured by feeding of the same signal through multiple paths using separate hardware. Outputs of both the processors are combined in the output card to drive the external relays. The Multi-function card gives the synchronization pulse to run the two processors in collusion. It also has the necessary selection logic to select the processor, which will download all the necessary information to the display units based on the keyboard interaction. It also drives the safety relay, which will ensure the
Page 4 of 69
Fault Diagnostics and Control System
Stesalit Limited
safety of the system under the worst-case condition of multiple failures in the system by withdrawing the power to drive some of the vital external relays of the loco. All the status inputs are available in the form of 110 VDC input for ON condition and no voltage for OFF condition. Analog voltages are available in very high voltage, which are attenuated in the signal-conditioning box and then fed to the analog module. Six TM currents are sensed through the voltage drop at shunt of Traction Motor by means of low voltage. Isolation amplifiers are used for feeding each input to the processor after proper scaling. All the outputs are driven by solid-state switch with short-circuit protection to drive the external relays with 110VDC. Elaborate testability at the output has been kept to ensure the integrity of the output status.
Each of the two processors interfaces to the I/O modules through separate I/O bus so that in case one of failure of one of the busses, the other can still continue with the operation. Communication between the two processors is carried out through inter-processor communication bus to carry out the voting process. The processors have individual health lines which are also interchanged to crosscheck the proper functioning of the system. One USB port is provided in each CPU card to download the data to USB memory device or Pen Drive.
The system uses two display units to prompt the various status and alarm conditions of the loco. A 40 alphanumeric character x 4 lines LCD display unit is used for this purpose. It also has two segments 7-SEG Display to display the current notch position. Five numbers of keys are provided to enable the user to browse through the status and fault condition of the loco. The display unit receives +110V power from LOCO battery i.e. from wire no. 700. This unit has a built in power supply module to convert +110V to +5V and +12V.
Page 5 of 69
Fault Diagnostics and Control System
Stesalit Limited
+110V DC
PSU-A
PSU-B
DIODE OR-ing +5V
Analog Input
Signal Conditio ning Module. Analog Input
TM CURRENT SENSING MODULE - A
+12V
Display Unit 1
Display Bus A
CPU-A
I/O Bus A Input Module
TM CURRENT SENSING MODULE - B
Display Bus.
MultiFunction Card.
Sync.
IPC Comm. Bus
Interface A Input Scanner External Status Input
CPU-B
Display Unit 2 Display Bus B
I/O Bus B
Interface B
Output Module
Interface A Output Driver. Interface B
Control Outputs.
Fig.1: System Architecture
Page 6 of 69
Fault Diagnostics and Control System
Stesalit Limited
4. SYSTEM CONFIGURATION
The system contains three separate sub-racks, which are fitted inside the main cabinet. The lowest sub-rack contains two Processor cards, one Multifunction card, one Analog Input cards and two Power Supply card. In the middle sub-rack there are eight Input cards, out of these one is redundant card and one is spare card. All the external input wires are routed from the backplane to the terminating 19/17 pin circular (bayonet type) connectors mounted on the cabinet. The uppermost sub-rack houses five output cards, out of these three for 48 O/P, one is redundant and one is s spare output card, which are common for both the A & B processors. The uppermost sub-rack also has one card called filter card. All the external output wires are similarly extended from the backplane to the 19 pin circular connectors placed on the cabinet. The front side of the cabinet is a detachable door. The door is also provided with a lock to protect the system from unauthorized access. The rear side of the cabinet is having four M12 nuts to fit the system to AC2 panel wall.
Normally the FDCS can accept 128 digital inputs (96 I/P for 6 I/P card, 16 I/P for one Redundant I/P card, 16 for one spare I/P card) and 12 analog inputs and can drive up to 80 digital outputs (48 O/P for 3 O/P card, 16 O/P for one Redundant O/P card, 16 for one spare O/P card). The inputs enter to the FDCS through 7 no. of 19 pin allied connectors (one is redundant) and outputs goes out from the system through 4 no of 19 pin allied connectors (one is redundant). A 3-pin bayonet type connector is used for 110V DC power supply. The connectors are fitted on the topside of the cabinet. The cables for inputs/outputs used are 19 core PTFE insulated 90% shielded type of 1 sq. mm. Outer jacketing of FRLS material is of suitable grade. One end of the cables is terminated to the allied connector and other end is terminated at 2.5 sq. mm cable lugs for M5 terminal stud with loco cable number of ferrules. The cables used for power inputs are of 3 sq. mm are of suitable grade. The interconnection of various connectors of FDCS main cabinet, display units, and signal conditioning box, Traction Motor
Page 7 of 69
Fault Diagnostics and Control System
Stesalit Limited
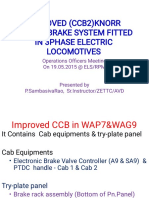
Current Sensing box and AC 2 Panels SB terminal is described later. The diagram of box mounting type allied connector in the control unit is shown in figure 2A. There is a mechanical polarization difference among the bayonet type connectors. Therefore the interchangeability among the input and output connectors is ruled out. Wiring details of various connectors are shown in table 1.Position of various racks, connectors of a typical FDCS are shown in figure 2. The display unit functions as an interface between the operator and the system. Each FDCS system consists of two display boxes, one in master cabinet (CAB A) and the other in rear cabinet (CAB B). In each box there is one display CPU along with one display keyboard and a power supply card. In display unit there is one 4X40 character LCD, two seven segment LED, one red LED, one buzzer and eight keys. Communication is held between the display and main unit trough RS485 serial port using 10 pin bayonet connector. The display panel diagram of the display system is shown in figure 3.
Each FDCS system consists of one signal-conditioning box. In this box there is one signal-conditioning card. High voltage analog inputs are terminated on the card through 6-way M5 terminal strip, which is fitted one side of the box. The voltages are down converted to 2.0V. These down voltage signals pass through 10-pin allied connector to FDCS main system, which is, fitted another side of the box.
Each FDCS system consists of two traction motor current sensing box. In this box there is one traction motor current sensing card. Low voltage (range between 45mV to 75mV) analog inputs are terminated on the card through 6-way and 2way M5 terminal strip, which is fitted at side of the box. The voltages are converted to 1.0V. These voltage signals pass through 10-pin allied connector to FDCS main system, which is, fitted another side of the box.
Page 8 of 69
Fault Diagnostics and Control System
Stesalit Limited
PLACE FOR BAYONET CONNECTOR (Details in Fig. 2A)
O U T P U T R D T
O U T P U T 1
O U T P U T 2
O U T P U T 3
O U T P U T S P R
F I L T E R
I N P U T R D T
I N P U T 1
I N P U T 2
I N P U T 3
I N P U T 4
I N P U T 5
I N P U T 6
I N P U T S P R
A N A L O G
C P U 1
C P U 2
M U L T I F U N C
P S U 1
P S U 2
Fig.2: FDCS Main Cabinet
Page 9 of 69
Fault Diagnostics and Control System
Stesalit Limited
Page 10 of 69
Fault Diagnostics and Control System
Stesalit Limited
OP RDT
OP1
OP2
OP3
OP SPR
SIG CON
INP RDT
INP5
INP6
INP SPR
DISP 1
TM 1 TM 2
INP1
INP2
INP3
INP4
DISP 2
PW R
Fig.2A: FDCS Main Cabinet Connector Details
Page 11 of 69
Fault Diagnostics and Control System
Stesalit Limited
Date 27/12/07
Time 12:30
Insert BL Key
MENU
ACK
ENTER
Fig.3: Display Screen Diagram
Fig.3A: Display Unit
Page 12 of 69
Fault Diagnostics and Control System
Stesalit Limited
Dimensions of FDCS9648: Parameter Main Unit (in mm) 900(including connector) Height 785 (without connector) Width Breadth Viewing Area 305 385 NA 180 (total) 240 (hole to hole) 265 (Total) 46 150 X 30 180 210 NA 180 210 Display Unit (in mm) 160 (hole to hole) 102 Signal Conditioning Unit (in mm) TM Current Sensing Unit (in mm) 62
NA
5.
System Highlights
System meets RDSO specification no. ELRS/SPEC/MPC-FDS/0001 (REV-2) Aug 2005. High performance Intel 80C196KC used for better performance. Elaborate testability and dual hardware redundancy at all levels including the processor for high degree of safety. Normal operation mode is in 2-out-of-2 mode, providing a safety integrity level of typically 10-12 / hour. In case of a failure in any one of the sub-system, the system continues its operation with a reduced safety integrity level of typically 10-7 / hour. Online system diagnostics for identification of faults. All Inputs and Outputs are optically isolated for protection against high voltage, surges, transients and ground faults. Total CMOS design for reduced power consumption and better MTBF. Modular construction for ease of maintenance. Uses 4 x 40 character alphanumeric displays status and fault conditions in lucid language for ease of understanding and the right corrective action. Use of large segment 7-segment LED for display of notch position. Non Volatile Fault Memory stores last 512 events with all back ground data, which can be retrieved sequentially through the display unit. Provision of USB port in the Control Unit to download fault history from system to USB storage device or pen drive.
Page 13 of 69
Fault Diagnostics and Control System
Stesalit Limited
6. Relay Logic Description
An array of relays and contactors is currently used inside the loco for protection of the various electrical equipments and its operation in a desired sequence. The functional blocks that are intended to be replaced by the Microprocessor based Fault Diagnostic and Control System are described below. The system would realize these functional blocks through software and activate the respective contactors and power relays to maintain the same operational condition of the loco.
6.1
PANTO GRAPH CONTROL CIRCUIT
Current from overhead is controlled by means of two pantographs, PT-1 and PT2. These are operated by hand-operated switch ZPT-1 & ZPT-2.Compressed air pressure is used to connect and disconnect the pantograph from the overhead high tension wire. To raise the pantograph in CAB-1 or CAB-2, the corresponding two relays VEPT1 or VEPT-2 are energized, depending on the status of the switch ZPT-1 or ZPT-2. In position O of the two switches ZPT-1 & ZPT-2, both the pantographs are OFF, i.e. VEPT-1 & VEPT-2 are not energized.
6.2
BATTERY CHARGER OPERATION
The battery charger is fed from the supply of ARNO/Static converter. The charger unit provides 110V DC and a load of 20 amps. A relay QV-61 has been provided across the charger, indicating its working. As long as charger is ON, QV-61 is energized and the signaling lamp LSCHBA remains OFF.
6.3: OPERATION OF THE HIGH VOLTAGE CIRCUIT BREAKER (MTDJ):
The electro valve MTDJ (O0) controls the high voltage circuit breaker DJ. The breaker is closed by means of the electro-valve EFDJ. The breaker (DJ) is closed as long as the MTDJ is closed. If MTDJ is interrupted by any of the relay contact
Page 14 of 69
Fault Diagnostics and Control System
Stesalit Limited
in its path then DJ will be tripped resulting disconnection of power feeding from the 25 KV HT overhead. CONDITIONS OF CLOSSING DJ:
1. 2.
BL key in CAB-1 or CAB-2 must be inserted and switched to ON position. After this, Q45 have to be ON. The conditions required for this are: a. BP1DJ closed b. BL1DJ/BL2DJ closed c. ZPT1/ZPT2 closed (Alternately BV closed) and d. BL1RDJ/BLR2DJ pressed and released as soon as LSDJ OFF. A. For ARNO based Loco :Now Q118 is to be energized. For this, the conditions required are: a. C118 must be de-energized, b. Blower motors must be OFF so that C105, C106, C107 de-energized, Q46 de-energized (between-notch relay) and c. GR within 0 to 5 Notches. B. For Static Converter based Loco:Now Q118 is to be energized. For this, the conditions required are: a. Blower motors must be OFF so that C105, C106, C107 de-energized, Q46 de-energized (between-notch relay) and b. GR within 0 to 5 Notches. As Q118 energized, Q44 will be ON provided Q45 closed. ASMGR full Notch contact available and GR-0 contact is there.
3.
4.
5. A. For ARNO based Loco :As Q44 and Q45 are ON and QCVAR OFF (Arno not started), C118 will be energized closing the Arno starting contactor and introducing the arno
Page 15 of 69
Fault Diagnostics and Control System
Stesalit Limited
starting phase by R118 and so Q30 will be ON. And Q44 will be latched through Q30. B. For Static Converter based Loco:As QV60 is in OFF condition, through NC contact of QV60, SI will get ON. It causes 440V A.C feed in wire no. 991 and 993 i.e. output of SI, by which Q30 gets on via resistance RQ30. Thus Q44 will be latched through Q30. 6. A. For ARNO based Loco :As C118 energized, DJ starting coil EFDJ will be energized. On opening of C118 (after ARNO starting) EFDJ will be de-energized but DJ will be hold by MTDJ. B. For Static Converter based Loco:As Q45 is energized, DJ starting coil EFDJ will be energized through NC contact of DJ and N/O contact of Q45 (This N/O contact gets closed in this condition). As EFDJ is energized, NC contact of DJ will open. Hence EFDJ will be de-energized but DJ will be hold by MTDJ. 7. The number of protection relays, such as QOA, QLA, QLM, QOP-1, QOP2, QRSI-1, QRSI-2 and QPDJ should be closed. 8. When Blower motors are ON after DJ closing, C105, C106, C107 will be energized, so the NC chain of the above 3 relays in the path of Q118 will be opened. Since Q118 is a time lag relay, it will be dropped after 5 sec, so that the path remains closed till the chain of protective relays QVMT-1, QVMT-2, QVRH, QVSL-1, QVSL-2, QPH, QCVAR close the alternate path.
Page 16 of 69
Fault Diagnostics and Control System
Stesalit Limited
Tripping of DJ:
A)
TRIPPING OF DJ INSTANTANEOUSLY.
1.
Through tripping of the relay QOA for ARNO based Loco and QSIT for SI based Loco. Through tripping of the relay QLA for ARNO based Loco only. Through tripping of the relay QLM. Through tripping of the relay QOP-1. Through tripping of the relay QOP-2. Through tripping of the relay QRSI-1. Through tripping of the relay QRSI-2. Through tripping of the relay QPDJ.
2. 3. 4. 5. 6. 7. 8.
B)
1.
TRIPPING OF DJ DELAYED BY AT LEAST 0.6 SEC.
If Q30 contact opens.
For ARNO based Loco: - Q30 is the ARNO voltage condition relay. It remains picking up between 215V - 260V AC. For SI based Loco: - Q30 is the Aux. Rectifier Side voltage condition relay of Static Inverter. It remains picking up between 400V 460V A.C
2.
QVSI-1 and QVSI-2 (rectifier blower protection relays) relays trip. OPERATION OF DJ OVER RECTIFIER BLOWER
OVERRIDING
PROTECTION RELAYS: For bypassing any of the contacts QVSI-1/QVSI-2, it is necessary to put the handle of HVSI-1 and HVSI-2 in the O or 3 position.
C) TRIPPING OF DJ DELAYED BY ATLEAST 5.6 SEC.
Q118 drops out after delay of 5 seconds and opens energizing circuit of relay Q44 which trips the main circuit breaker after a further delay of 0.6 second following any of the following faults.
Page 17 of 69
Fault Diagnostics and Control System
Stesalit Limited
Upon blower motors protective relays QVMT-1, QVMT-2, QVRH and QVSL 1-2 as well as upon failure of the oil pump via protective relay QPH and for ARNO based Loco through relay QCVAR also. During normal operation QVMT-1, QVMT-2, QVRH, QVSL 1-2, QPH and QCVAR for ARNO based Loco remain closed and auxiliary contacts (C105, C106, and C107 &Q44) remain opened. In case of any failure the associated protections relay open, the relay Q118 drop out in 5 sec. If the tap changer comes to a standstill at any particular notch while notching down with master controller on 0 position, relay Q46 is energized (contacts opened), thereby switching off the relay Q118. The relay Q46 is constantly switched on and off until the tap changer has reached zero position. Note: It is possible to put the switch HVMT1, HVMT2, HVRH, HVSL1, HVSL2, HPH in position 0 or 3 to override the contacts. In case of HQCVAR, 0 is the overriding position
6.4. A.
ARNO STARTING LOGIC DESCRIPTION
SEQUENCE OF OPERATION OF ARNO STARTING:
1.
BP1DJ, BL1DJ/BL2DJ and ZPT1/ZPT2 should be closed and then BL1RDJ/BL2RDJ is pressed for a moment (and released as soon as the green lamp LSCHBA glows OFF) to ON the relay Q45. (At this time GR should be in 0 Notch position).
Page 18 of 69
Fault Diagnostics and Control System
Stesalit Limited
2.
Normally, the relay Q44 is switched by the contact of Q45, if the GR is not there in between two notches (stuck at notch faults) and Q118 has picked up. On closing of Q44 and Q45 the ARNO starting contactor coil C118 gets energized to generate a phase difference between the voltage and current for starting the ARNO which is a single phase induction motor. C118 is cut by the excitation of the relay QCVAR (N/C).
3.
4.
6.4. B.
STATIC CONVERTER STARTING LOGIC DESCRIPTION
SEQUENCE OF OPERATION OF SI STARTING: 1. BP1DJ, BL1DJ/BL2DJ and ZPT1/ZPT2 should be closed and then BL1RDJ/BL2RDJ is pressed for a moment (and released as soon as the green lamp LSCHBA glows OFF) to ON the relay Q45. (At this time GR should be in 0 Notch position). 2. Normally, the relay Q44 is switched on by the contact of Q45, if the GR is not there in between two notches (stuck at notch faults) and in this condition relay Q118 will be ON. 3. Static Inverter will be ON by the NC contact of QV60 relay when it is in OFF condition,
6.5 BLOWER MOTOR CONTROL
NORMAL OPERATION: The contactors of the blower motors close automatically when MPJ1/MPJ2 puts in the forward or reverse direction and GR is at 1 or above position and Q100 is in closed condition. ALTERNATIVE PATH: The contactors of the blower motors may be energized if
BL1VMT/BL2VMT switch is closed and Q100 is in closed condition.
Page 19 of 69
Fault Diagnostics and Control System
Stesalit Limited
The starting of the motors for the traction motor blower and the transformer oil cooler are in the following sequence. 1. 2. 3. Closing the BL1VMT/BL2VMT Q100 is already closed (since DJ is closed and C118 is opened). keeping the disconnecting switch for oil cooler blower motor HVRH in position 1 or 3. Coil of C107 gets energized and transformer oil cooling blower motor gets started. 4. When the relay C107 is energized, the time delay relay QTD105 gets energized after a time delay of 5 seconds and its contact energized the coil C105 if the disconnecting switch for traction motor blower no.1 HVMT-1 is in 1 or 3 position and also energized the time delay relay QTD106 after a delay of 5 seconds. The contact of QTD106 energized the relay C106 if the disconnecting switch for traction motor blower no.2 HVMT-2 is in 1 or 3 position. The relay C105 & C106 latches the contacts by the self-contact C105 and C106. 5. For WAG-7 Loco having Static Inverter has C108 relay also. If C145 is in ON condition and C107 in OFF condition only then C108 will be energized. In WAP-4 Loco, C108 is not available. Note: Driver can switch off the blower motor contactors C107, C105, and C106 by directly putting the disconnecting switches HVRH, HVMT-1 and HVMT-2 in position 0 or 2 respectively.
6.6 COMPRESSOR MOTOR CONTROL
GENERAL DESCRIPTION The compressor motor contactors C101, C102, and C103 are energized, if any of the key BLCP and valve RGCP or BLCPD is closed, and also the relay Q100 is closed and HCP is not in position 0 (The position of HCP determines how many of compressor motors will be started at a time). When no compressor motor has been
Page 20 of 69
Fault Diagnostics and Control System
Stesalit Limited
started, the relay for unloaded valve Q119 is under energized condition through a chain of NC contacts of C101, C102, C103 and the N/O contact of Q119 make unloaded valves VEUL1-3 energized. Unloaded valves are electro-pneumatic valves work to avoid the backpressure of the delivery pipe at the time of starting of compressors. First C101 and C103 are energized which results opening of path for Q119 coil. The path of C102 is closed through N/C contact of Q119. So C102 starts after dropping of Q119. The purpose of unloaded valves is served through the 5 time lag of Q119.
O8
VEUL
5sec
Fig. 4: Signal Diagram Un-loader Valve 6.7 TRACTION MOTOR CONTRACTORS (LINE CONTACTORS) There are six Line contactors L1, L2, L3, L4, L5, and L6 for the traction motors. NORMAL OPERATION: For closing the line contactors, the following conditions must be satisfied: 1) The running/braking drum of the master controller MP is only in running position. 2) Q50 is closed. 3) CTF [1-3] are in running. 4) The tap-changer GR must be on notch 1 or above.
Page 21 of 69
Fault Diagnostics and Control System
Stesalit Limited
5) The rotary switch position of HVS1-2 and HVMT1-2 must be at 1 or 3, which determine the half or full power availability of the traction motor. 6) HMCS-1 & HMCS-2 rotary switching positions are at closed contacts. Once traction motor contactors are closed, and GR is in notch position 1 or above the line contractors relays are latched by their own contacts through a N/O contact of DJ, which bypass the MP and Q50.
6.8
TRACTION MOTOR CONTROL
The traction motor double reverser J1J2, pneumatically controlled, connects the exciting windings of the motor in such a way that these carry current in one direction or in the other thus enabling the locomotive to run in either direction. 6.8.1 OPERATION OF TRACTION BRAKING REVERSER IN RUNNING POSITION 1) Main circuit breaker DJ must be closed. 2) Tap Changer GR must be in position O (zero) 3) The selected position of the MP must be coincide with the corresponding operating position of the switches CTF[R]/CTF [B] 4) Supervision takes place via the auxiliary contacts of reversers J1 J2. 6.8.2 OPERATION OF TRACTION BRAKING REVERSER IN BRAKING POSITION 1) Main circuit breaker DJ must be closed. 2) Tap Changer GR must be in position O (zero) 3) The selected position of the MP must be coincide with the corresponding operating position of the switches CTF[R]/CTF [B] 4) Supervision takes place via the auxiliary contacts of reverser
Page 22 of 69
Fault Diagnostics and Control System
Stesalit Limited
6.8.3 OPERATION
OF
TRACTION
MOTOR
DOUBLE
REVERSER
IN
FORWARD DIRECTION 1) Main circuit breaker DJ must be closed. 2) Tap Changer GR must be in position O (zero) 3) The selected position of the reversing drum MPJ must be coincide with the corresponding operating position of the switches J1J2 [F]/J1J2 [R]
4)
Supervision takes place via the auxiliary contacts of reverser CTF[R]/CTF [B]. OF TRACTION MOTOR DOUBLE REVERSER IN
6.8.4 OPERATION
REVERSE DIRECTION 1) Main circuit breaker DJ must be closed. 2) Tap Changer GR must be in position O (zero) 3) The selected position of the reversing drum MPJ must be coincide with the corresponding operating position of the switches J1J2 [F]/J1J2 [R]
4)
Supervision takes place via the auxiliary contacts of reverser CTF[R] CTF [B]. The traction/braking switch CTF1-3 with pneumatic control connects the power circuits of motors for traction or braking. Both J1-2 and CTF1-3 can be changed over the 0 position of GR.
6.9
NOTCHING IN LOCO
Inside the Loco, the main transformer (primary fed by 25 KV) comprises one autotransformer with 32 taps (called notches) and a step down transformer with two separate secondary. The primary of the step-down transformer is connected to one of 32 taps of the autotransformer by means of 32-step tap changer GR, which is driven by a pneumatic servomotor SMGR. The passage from one tap of transformer to another takes place on load. When GR value is increasing it is called notch-up of the loco and when decreasing it is called notch-down. Notching is held during running
Page 23 of 69
Fault Diagnostics and Control System
Stesalit Limited
/braking condition of loco. Running/Braking is controlled by master controller MP called Running /Braking drum and Forward/Reverse is controlled by reversing drum MPJ. MPJ can be operated only when MP is at position 0 (mechanically locked). In the loco there is adequate arrangement to ensure that the tap changer always moves only one notch at a time. FUNCTIONALITY OVERVIEW: If Master Controller MP in + position with RUN /BRK, SMGRVE-1 UP valve will be activated. If it is in - position with RUN /BRK, SMGRVE-1 DOWN valve will be activated. Instead of Master Controller push button switch for operating GR motor in progression BPP1-2 can be used for notching up and push button switch for GR motor in regression BPR1-2 can be used for notching down. The relay EVPHER will be ON after 5notch. A) Tap changer down valve SMGRVE2 DOWN is energized both for the running braking drum MP at running and braking position, provided 1. ZSMS must be in position 1(ON). 2. ZSMGR is ON. 3. GR is in 1 to 32 in any of the valid position. 4. Notch to notch relay Q52 and slip protection relay Q51 must not be energized. 5. The relay Q50 must be closed. B) Tap changer down valve SMGRVE1 UP is energized both for the running braking drum MP at running and braking position, provided 1. ZSMS must be in position 1(ON). 2. ZSMGR is ON. 3. GR is in 0 to 31 in any of the valid position. 4. Notch to notch relay Q52 and slip protection relay Q51 must not be energized. 5. The relay Q50 must be closed.
Page 24 of 69
Fault Diagnostics and Control System
Stesalit Limited
To ensure safety, there exists the arrangement of auto regression i.e. tap changer automatically comes to zero from any high notch value. Auto regression occurs in case of ARNO over voltage or wheel slip or fall in brake Pipe pressure monitored by air brake governor as follows: a. In case of ARNO over voltage, auto regression occurs via Q20 b. In case of wheel slip, auto regression occurs via Q48. c. In case of fall in brake pipe pressure, auto regression occurs via QRS relay which causes energizing of Q51 and so auto regression. d. If relay Q50 is de-energized in any case then auto regression Takes place via Q50. 6.10. BRAKE FAIL PROTECTION VALVE IP (MECHANICAL BRAKE) IP valve is generally used for braking when normal brake fails to work properly. It is generally electrically operated mechanical brake. Operation of IP valve is controlled by FDCS. It is Output22 of FDCS. If Out22 is in ON condition, IP valve is in de-energized condition hence no braking. If Out22 is in OFF condition, IP valve is in energized condition hence mechanical brake come in to work. This Output will ON if 1. Q30 is ON or CTF is in Braking side and 2. MP in Braking side or Input73 (GR 0_5 for WAG-7, GR 11_32 for WAP-4) is in ON condition.
6.11. SHUNTING CONTACTORS
In order to increase the balancing speed, three steps of shunting are used for field weakening. The shunting operation is done under running condition controlled by field weakening controller of master controller MPS1-2. Four shunting steps, Sx1, Sx2, Sx3A, and Sx3B are introduced in MPS1-2. This shunting is valid only in notch position 20 and onwards.
Page 25 of 69
Fault Diagnostics and Control System
Stesalit Limited
For WAP-4 type Locomotive there are two more shunting contactor also named Sx41 and Sx42. By pressing switch ZQWC, the weight transfer relay QWC can be energized in J1J2 [FOR] or J1J2 [REV] condition for notch value 0-10, thus activating O20 and O21 (S13-S63).
6.12. SANDING LOGIC DESCRIPTION
Sanding occurs via the electro valve VESA-1 & VESA-2 for two directions respectively. These relays are energized by operating the pedal switches PAS-1 or PAS-2 in two cabs or by the wheel slip relays Q48. If the pedal switch is applied and J1J2 are in the forward direction, the relay named VESA-1 will be activated; otherwise VESA-2 will be activated if J1J2 is in the reverse direction. On the other hand, VESA-1 & VESA-2 will be activated via Q48 (The relay Q48 can be energized only if the traction breaking switches CTF are in running position.). If the wheel on one boogie starts slipping, the load on the motor drops and this is detected by the relay QD1& QD2. (The HMCS-1 switch also selects this, where we need auto sanding or pedal sanding). When the current difference exceeds around 150A, the relay QD is energized. Operation of the relay Q48 as a result of wheel-slip and operation of relay QD-1 or QD-2 also results in automatic regression of the tap changer (GR) till the relay QD-1 and QD-2 drops out to arrest of the wheel slip. The contact of the relay Q48 are provided with a drop out delay of 5-secs. This begins as soon as the relay has been de-energized. This means that sanding will continue for 5-sec after wheel slip has stopped. For MU operation of WAG-7 type Loco, if Q48 acts in any Loco i.e. leading Loco or trailing Loco, auto-sanding and auto-regression should take place via Q51 in its energized state at other Loco also.
Page 26 of 69
Fault Diagnostics and Control System
Stesalit Limited
6.13. SIGNALLING LOGIC DESCRIPTION
a. LSDJ Lamp (RED): It indicates the position of the main circuit breaker DJ. When DJ is open QV60 is energized, which turn ON the lamp LSDJ. LSDJ ON OFF DJ OFF ON
b. LSCHBA (GREEN): Lamp LSCHBA will be ON as soon as the driver inserts the BL key. On closing DJ, lamp LSCHBA extinguishes after picking up of the relays QV-61 and QCVAR on completion of starting of the ARNO. c. LSGR (GREEN): The lamp LSGR indicates whether the tap changer GR is at position 0 or away from that position. The relay QV62 should be ON if GR is at zero position. The lamp LSGR is switched on by the way of the contacts of QV62. d. LSB (YELLOW): The lamp LSB is switched ON by the relay QV64, which in turn is energized by the contact of the relay Q50, which is normally closed. The lamp will be OFF if the Q50 is in ON condition. e. LSP (RED): If signaling checking lamp switch BPT-1or BPT-2 switch is pressed or wheel slip relay Q48 is closed, then LSP glows.
Page 27 of 69
Fault Diagnostics and Control System
Stesalit Limited
f.
LSRSI (YELLOW):
This lamp glows when silicon rectifier RSI1-2 is ON or signaling lamp checking switch BPT1-2 is pressed. g. LSOL (YELLOW): This signal lamp is useful only during multiple operations of the locomotives. For detecting defective loco in the event of fault occurring in any of the locos, QVLSOL is ON and LSOL is also ON. h. LS GROUP (RED): This lamp glows when DJ is not in closed condition, or battery charger is in OFF condition, or silicon rectifier cubicle is ON, or Q50 is in OFF condition. This indication lamp presents only in WAG-7 type Loco.
7.
Hardware Description
The system is provided with three motherboards, which are fitted at the backside of three sub racks. The cards are plugged to the motherboard through EURO connectors. To ensure the correct insertion of cards, mechanical polarization is provided at the backplane by positioning the EURO connectors at different level for different cards. The advantage with this arrangement is that the same types of cards are interchangeable and at the same time the insertion of a card at wrong slot is prevented. The system consists of two processor cards with a common set of Input Cards, both analog and digital, and common Output and Multi-function Card set. The power supply card provides power to both the processor sub-systems. Each of the Digital Input Cards accommodates 16 external inputs. Three such Input cards support altogether 128 inputs. For both the processors, altogether eight input cards are there with complete dual hardware redundancy. Out of
Page 28 of 69
Fault Diagnostics and Control System
Stesalit Limited
these eight input card one is redundant and one is spare. The system presently uses 80 inputs and the rest are available for future expansion of its functionality. The analog card interfaces to 12 external analog inputs. Each of the analog inputs have optical isolation amplifier to protect the system from harmful external high voltage. The system has five output cards. Out of these five output cards, one is redundant and one is spare. Each output card drives 16 outputs through solidstate FET switches. Each switch can drive typically 3 Amps from 110Vdc supply for driving external relays. Again each of the switches is also provided with short circuit protection so that in case of accidental overload or external short-circuit the switch is tripped to protect the switches. Altogether five output cards are provided in the system to support 80 outputs, out of which, 40 outputs are used at present. The rest are there for future expansion. The multifunction card provides the synchronization clock to both the processors. It also processes the health signal of the two processors, which is used to arm the output drives of the output module. The combined health signal is also used to drive a safety relay, which provides 110V power to the first two output cards driving most of the vital relays. In case of a critical fault, the processors go to a safe state by withdrawing the health signals, which in turn trips the safety relay to remove the power from the first two output cards for driving the corresponding outputs. The system has two power supply card. One is spare. User can switch on any power supply card or both. The power supply unit produces the requisite +5Vdc and +12Vdc power for the system from the 110Vdc power supply. It has two separate controllers for generating those outputs. Switched-mode technology is used to increase the efficiency of the power supply and thus produce less heat inside the cabinet.
Page 29 of 69
Fault Diagnostics and Control System
Stesalit Limited
Each FDCS system has two display panels; one is placed in the front cab and the other in the rear cab. The system communicates with each panel through an RS485 communication link. Whenever an alarm comes in the relay logic, it is displayed to both display panels. The display unit of the cab, which contains the BL key, will give audio annunciation to draw the attention of the driver. The audio buzzer gets deactivated after getting acknowledgement from the user through the key ACK. The minor alarms are displayed only for 6 sec without any audio annunciation. The user can browse through the status of inputs and outputs with the help of five keys on the keyboard. Also the faults (if exists) can be viewed one by one on the display panel. The present notch value is always displayed on the 7 segment LED. The FDCS system has got the feature of logging of status and faults that can be downloaded to a USB mass storage device. With the help of a history buffer in the memory unit of CPU, the system is enabling to download last 512 faults each with background data. Description of each individual module is given below.
7. a
PROCESSOR CARD PROCESSOR CARD
P09/FDCS01
1. Card Name:
2. Card No.:
3. Card Requirement: This is the heart of the FDCS containing the CPU and all its associated input & output interfaces. It controls the entire hardware, processes all digital and analog data and based on input data, it issues the corresponding output command. 4. Functional Capacity Processor RAM space EPROM space Clock Frequency - Intel 80C196 Micro controller - 32K bytes - 64K bytes - 8MHz
Page 30 of 69
Fault Diagnostics and Control System
Stesalit Limited
Communication Speed - Main system with display at 2.1K baud -Inter Processor communication at 9600 baud Watchdog - Internal & external
5. Functional Description of Processor Card
Based on high performance 16 bit Intel 80C196KC Microcontroller Built-in internal & external watchdog with real time task monitor to keep the system continuously on track.
On-line diagnostics of ROM, RAM and other utilities. Two processor cards per system to ensure double hardware redundancy.
On-line LED display ensures easy diagnostic of fault. Inter-processor communication interface Display communication interface USB support.
A number of alarms LEDs are there in the processor card, which display alarm for different conditions of the processor and its related hardware. Definitions of the alarm LED are as follows. A A. System OK. (Green) B. PSU Alarm (Amber) C. System working in 2-out-of-2 mode (Green) D. Display panel not responding (Amber) E. Error in Input module (Red) F. Error in Output module (Red) G. Error in Analog Input module (RED) H. Processor sub-system SHUT DOWN (Red) Fig.5: Facia Panel Diagram of CPU card E F G H
USB PORT
B C D
Page 31 of 69
Fault Diagnostics and Control System
Stesalit Limited
7. b. MULTIFUNCTION CARD
1. Card Name: 2. Card No.: Multifunction Card P09/FDCS12 Processor module and Interface hardware for Main System and the Display modules. 4. Functional Capacity: Driver interface for Main system and Display module Communication. Processor synchronization hardware Power shutdown switch for Output card 1 and 2 where driver of the vital outputs are exists. 5. Functional Description of the Multifunction card: This module provides the synchronization clock to the two processors derived from a separate crystal source. This section of hardware is common for both the processors. It also processes the health signals received from the two processors and derives the master health line, which enables the output modules. It also selects the particular processor, which will communicate to the display units to display the status and alarm information.
3. Card Requirement: This card accommodate various hardware for both the
7. c. DIGITAL INPUT CARD
1. Card Name: 2. Card No.:Digital Input Card P09/FDCS02
3. Card Requirement: - This card accepts the various inputs with double modular hardware redundancy. 4. Functional Capacity: - Each Digital Input card contains 16 digital inputs. The System has 8 input card out of these 1 is redundant and 1 is spare card. The system has a provision of 128 digital inputs, which are distributed to both the Processor card.
Page 32 of 69
Fault Diagnostics and Control System
Stesalit Limited
5. Functional Description of the Digital Input card: Each input card contains 16 digital inputs. In the facia there are 16 green LED to monitor the status of individual input. All inputs are protected from surge and transient voltages by using MOVR. Each input to a processor is acquired through two sets opto-isolators to ensure correctness of data. In the first stage high voltage (110V) are down converted with the help of a high wattage resistance. Optical isolation at the input side is done through individual optical isolators. Two optical isolators with separate hardware are used for each input. The high wattage resistance and the MOVR part are common to both the set for each input. Any failure in this part will be treated as a common mode failure, which will be detected through the other processor data. Any failure in the subsequent stages will be differential mode of failure, which can be identified by the individual processor through testability and redundancy. The processor collects the inputs through different hardware using chip select and input-read logic signal. The data is read in the form of data and inverted data, which gives a better integrity of the data, read through the bus. Inputs are assigned to the processor by the address of the card, which are placed in the back plane (it is independent of the slot). To select a particular card the address is compared with a four-bit card address and an active low signal is generated to select a particular chip.
7. d. OUTPUT CARD
1. Card Name: 2. Card No.: Output Card P09/FDCS11
Page 33 of 69
Fault Diagnostics and Control System
Stesalit Limited
3. Card Requirement: This card drives various high voltage relays through P-channel MOSFET. 4. Functional Capacity: - Each Output card contains 16 outputs. The system has five output card out of these one is redundant and one is spare. The system has a provision of 80 outputs. 5. Functional Description of the Output card: The system has a provision for 80 digital outputs. All outputs are optically isolated. The system is a two out of two system i.e. two processor will work simultaneously and in case of failure of one the other will take the whole responsibility of the system. Output data from the two-processor cards are first latched on individual buffers. This is crossed checked by the individual processor through feedback ports. The data is then passed through an OR gate to combine the activation signals from the individual processor. A second stage of feedback is provided from this stage. This ORed output is used to drive opto-isolators, which in turn switch ON the MOSFET for driving the external relay. The driver circuit is short circuit current protected. The current protection is achieved by considering the resistance drop due to over current flowing in the input side, as a result a thyristor will be ON, which pulls the gate to the high voltage towards source; hence put the FET into cut-off. A Zener diode is used between source and gate of the FET, to protect gate to source break down, due to some fault in the circuit. The output latches are armed with the health line of the processors extended through the backplane. In case of any failure in a processor subsystem, the processor identifies the fault and goes to a safe state where it
Page 34 of 69
Fault Diagnostics and Control System
Stesalit Limited
negates the health line. In the output card, this negation of the health line forces the output drive of the faulty processor to the OFF state. The system would then continue its operation with the help of the other processor subsystem.
7. e. POWER SUPPLY CARD
1. Card Name: 2. Card No.: Power Supply Card P09/FDCS07
3. Card Requirement: This card converts power from 70V-135V input power supply to +5V and +12V for the operation of FDCS. 4. Functional Capacity: Input Voltage - 110V nominal (70V to 135V) Output Voltage - +5V DC nominal, 10%, 1Amp +12V DC nominal, 15%, 1.2Amp Protection Input - Surge and transient voltages Over voltage and under voltage Output - Over voltage and short circuit Efficiency - Better than 75% at nominal
5. Functional Description of the Output card: The system has two Power Supply card. User can switch ON one power supply or both for use. The power supply unit first starts its operation from a series 10V regulator derived from the 110V dc supply. Once the module starts to operate it will generate an auxiliary +12V supply from which it will take the input, i.e. selffeeding takes place. The PSU has two separate switching power supply modules, one for +5V and the other for +12V.The two power supplies are kept fully dc isolated
Page 35 of 69
Fault Diagnostics and Control System
Stesalit Limited
from the 110V signal earth. They are also mutually isolated from each other. Optically isolated feedback is used for voltage stabilization, maintaining the ground isolation. Elaborate alarm monitoring circuit is used to raise alarms if the voltage goes beyond certain limits. The input voltage is also monitored to be within a specified limit, beyond which the switching regulator is switched off raising over voltage or under voltage alarm. The output voltages are also required to be within a specified limit beyond which alarms would be generated. The two CPU cards monitor all the PSU alarms. There are four testing points and seven alarm LEDs in the each PSU card as shown in figure. A. PSU ON (Green) B. I/P over Voltage Alarm (Red) C. I/P under Voltage Alarm (Red) D. +5V over Voltage Alarm (Red) E. +5V under Voltage Alarm (Red) F. +12V Over Voltage Alarm (Red) G. +12V under Voltage Alarm (Red) P. +5V Test Point (Red) Q. +5V Ground Test Point (Black) R. +12V Test Point (Red) S. +12V Ground Test Point (Black) S E F G Fig.7: Facia Panel Diagram of PSU card P C Q R D B A
7.3
ANALOG INPUT MODULE
The system has a provision of 12-analog inputs. Out of 12-analog inputs, four channels are used at present and the rest is kept open for future. Out of these four, three of them are for A.C inputs to measure the phase voltages of the ARNO and one is DC high voltage input (1000V) coming from the traction motor.
Page 36 of 69
Fault Diagnostics and Control System
Stesalit Limited
External high voltage analog inputs, scaled down by signal conditioning unit and low voltage analog input, scaled up by TM Current sensing unit are taken through a differential amplifier stage in the Analog input card. Thus the effect of any difference in analog ground potential (ANGND) would be cancelled out. The swing of analog signals, from the output of differential amplifier, is kept within +5V and GND. This voltage is fed to the CPU card through the analog interface card for A/D conversion. There are pots with each analog channel to adjust the gain to the proper value. These are accessible from the front for trimming if required. The front panel of the analog module is shown below
7.4
SIGNAL CONDITIONING MODULE
High voltage analog inputs are terminated on the card and are down converted. The 1000V dc is down converted to 2.0V first by simple resistance drop. The 3 inputs for 3 phases AC, high voltages are first rectified and then the rectified output is down converted by resistance drop. The Analog Module transfers the external analog signal through optical amplifiers to isolate the signals from dangerous external voltages. Each of the analog sections is powered by separate isolated power supplies so that none of the external voltages have any mutual relationship. The isolated power supplies are generated by four sets of switching regulators working from 12Vdc of the main system. This power is taken with the help of the circular connector connecting the signal-conditioning unit with the main unit.
7.5
TRACTION MOTOR CURRENT SENSING MODULE
Six Traction Motor shunt voltage are terminated on the card and are up converted. The almost 75mV D.C voltage is up converted or amplified to a level of almost 1V by differential amplifier. The Analog Module transfers the external analog signal through optical amplifiers to isolate the signals from dangerous external voltages. Each of the analog
Page 37 of 69
Fault Diagnostics and Control System
Stesalit Limited
sections is powered by separate isolated power supplies so that none of the external voltages have any mutual relationship. The isolated power supplies are generated by four sets of switching regulators working from 12Vdc of the main system. This power is taken with the help of the circular connector connecting the TM Current Sensing unit with the main unit.
7. h. DISPLAY CARD
1. Card Name: 2. Card No.: Display Card P09/FDCS09
3. Card Requirement: This card display various faults, input output status, notch position. By using the keyboard, which is attached with it, the user can see the fault history, current fault, I/O status etc. In the Display Module there is a power supply card which generates +5V and +12V from 110V. 4. Functional Capacity Processor RAM space EPROM space Clock Frequency - Intel 80C196 Micro controller - 32K bytes - 64K bytes - 8MHz -Inter Processor communication at 9600 baud Watchdog Input Voltage Output Voltage - Internal & external - +110V nominal - +5V DC nominal, 10%, 1Amp - +12V DC nominal, 10%, 1Amp Protection Input Output Efficiency - Surge and transient voltages - Short circuit - Better than 75% at nominal
Communication Speed - Main system with display at 2.1K baud
Page 38 of 69
Fault Diagnostics and Control System
Stesalit Limited
7.7I. FILTER CARD Filter Card is used to protect the Power Supply Card as well as the system from surge, spike and external hazards. The raw 110V dc from LOCO battery is fed to the power supply unit through a surge protector and filter section to protect the system from high voltage spikes and surges coming along the power line. The first stage is a Gas arrestor to absorb high-energy pulses. This is followed by an LC filter and a transient protector to bring down the spikes within acceptable limit. The primary supply is connected to earth through high voltage capacitors to bypass AC noises but ensuring DC isolation.
7.7
DISPLAY MODULE
The card is housed in the Display Unit. In an FDCS system two display units are required for two cabins. The main component of the card is an 80196KC microcontroller, which actually drives two 7-segment LEDs, one 40character X 4lines LCD display and a buzzer. Serial communication with the main controller is done in RS485 standard with ground isolation.
8. Software Architecture
Microprocessor Based Control and Fault Diagnostic System is a dual processor redundant system. Normally it works in 2-out-of-2 mode i.e. two processor are working simultaneously in conjunction to each other. In case of failure of any of the processor or its sub-system, the other processor will take up the whole responsibility of the system, indicating an alarm that the system is working with one processor. Integrity of the system will then be ensured through the built-in testability with the various functional blocks. It is a system, where apart from its basic purpose of monitoring the inputs and controlling the outputs, safety is an important issue. A good level of safety and reliability is achieved by managing the redundancy of both hardware and software stage. With such a tightly coupled system, synchronization of the two processors is a big issue. The synchronizer hardware in the multi-function card
Page 39 of 69
Fault Diagnostics and Control System
Stesalit Limited
gives the synchronizing clock to both the CPUs. Each of the processors takes the synchronization information from the synchronizer and does the same specified task at a particular instant of time. In case of two out of two system, inter processor communication at various stages is the heart of the system to ensure the safety and reliability. Information acquired by each processor along with its processed outputs is interchanged to ascertain the validity. In case of any mismatch, the faulty unit is isolated from the system by forcing the software to a fail-safe core where it switches OFF all the corresponding outputs and withdraws the health signal. The other processor would then carry out the processing and control the outputs individually. All the vital and time critical jobs are performed in a 10 msec periodic task, invoked by the synchronizer. This task is basically an 8-step state machine. The job of reading the inputs, processing the data for validity and relay status and outputting the data is distributed among the 8 states in such a way that the processor gets ample time to carry out other jobs. The cycle time to complete the state machine is thus 80 msec. which is consistent with the response time of the external relays. Each of the processor cards reads the inputs through two separate optoisolators. It also receives additional two sets of data from the adjacent processor through inter-processor communication. Thus each processor at a certain point of time has four data for the same input. The validity of data is derived from these four data sets to give a very high integrity of data. The logic used to validate the data is given in the table shown below.
Page 40 of 69
Fault Diagnostics and Control System
Stesalit Limited
TABLE FOR VALIDATION OF INPUTS
INPUT COMBINATION. A B 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
DATA 0 0 0 0* 0 0* 0* 1 0 0* 0* 1 0* 1 1 1
ALARM SELFA SELFB /ADJ.B /ADJ.A 0 0 0 1 0 1 0 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 1 0 0 0 0 1 0 1 0 0
FATAL ALARM 0 0 0 1 0 1 1 0 0 1 1 0 1 0 0 0
=> Status of these data cannot be derived from these states. However, the output is treated as OFF which is a safer state. In case of output, the system uses OR-ing logic to feed the particular output. A number of hardware feedbacks are taken to ensure the correctness of the output. The software first cross-checks the equality of the output state derived from the input status. If the equality does not hold good for a certain time out period (typically 400 msec.), the total system would go to a safe state, since in 2-out-of2 voting, the system cannot decide who is correct. Integrity of the output is checked against three levels of feedback and in case of any mismatch, the respective processor would go to safe state. The various tasks that the software would perform are given below.
Page 41 of 69
Fault Diagnostics and Control System
Stesalit Limited
A. Power On Self Test (POST) a. Processor Initialization b. RAM Test c. ROM Test d. Initialization of Analog Inputs e. Initialization of variables and peripheral devices f. Initialization of Interrupts B. Base Executive a. Display Transmit Packet Processing b. Display Receive Packet Processing c. Processing of External PC information d. Self Diagnostics C. Timer Routine a. Scanning of Inputs and checking its local validity b. Transmission of Input data to Adjacent Processor c. Reading Feedback status of outputs and crosschecking with the derived output data. d. Validation of input with adjacent data and derive virtual outputs (Q relays). e. Derivation of outputs f. Transmission of output data to Adjacent Processor for validation. Derivation of Status Conditions for display. g. Derivation of Fault Conditions in the Loco for display. h. Validation of Output data with the adjacent data and issue the outputs to the output card.
Page 42 of 69
Fault Diagnostics and Control System
Stesalit Limited
D. Service Routine for Display Units a. Processing of receive data to check integrity of the information packet received from display. b. Transmission of the information packet to display unit. E. Service Routine for Interfacing External PC a. Processing of information packet received from PC b. Transmission of information of packet to PC Each of the tasks has its own defined functionality. The architecture of the software is build up in such a way that the overall functionality of the system is achieved.
Page 43 of 69
Fault Diagnostics and Control System
Stesalit Limited
9.
CSU1
Inter Connection Details:
6
CSU2
LOCOMOTIVE TERMINAL SB In AC2 Panel
6
6
SIGNAL CONDITIONING UNIT in AC2 Panel
10
19
19
19
19
19
19
19
19
10
DISPLAY UNIT NO. 1 FOR CAB A
10
FDCS 9648 CONTROL UNIT In AC 2 Panel
10
DISPLAY UNIT NO. 2 FOR CAB B
Fig.8: Wiring Details of FDCS
Fig.9: Allied Connector diagram
Page 44 of 69
Fault Diagnostics and Control System
Stesalit Limited
FDCS
LUG Allied Connector Wire
Fig.10: Connection diagram of Allied Connector, wire and lug of FDCS
A. FDCS Unit to Terminal SB:
Signal Name No. Of Pins 19 Connector type on FDCS Unit
97B3102R-22-14P
Connector type on Cable FDCS Unit side 97B3106F - 22 - 14S SB side: 2.5mm Lugs FDCS Unit side 97B3102F -22-14SW, SB side: 2.5mm Lugs FDCS Unit side 97B3106F - 22 14SX, SB side: 2.5mm Lugs FDCS Unit side 97B3106F - 22 - 14SY , SB side: 2.5mm Lugs FDCS Unit side 97B3106F - 22 14SZ, SB side: 2.5mm Lugs FDCS Unit side 97B3102F - 20 29S, SB side: 2.5mm Lugs FDCS Unit side 97B3102F-22- 14SW,SB side: 2.5mm Lugs FDCS Unit side 97B3102F-22- 14SZ,SB side: 2.5mm Lugs FDCS Unit side 97B3102R-22- 14P,SB side: 2.5mm Lugs
Cable type and length in meter 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each)
Digital Input 0 to 15
Digital Input 16 to 31
19
97B3102R -2214PW 97B3102R-22 14PX 97B3102R-2214PY 97B3102R -2214PZ
Digital Input 32 to 47
19
Digital Input 48 to 63
19
Digital Input 64 to 79
19
Digital Input 80 to I94
19
97B3102R - 20 29P 97B3102R-2029PW 97B3102R-2029PZ 97B3102F-2214S
Digital Input 95 to 110
19
Digital Input Spare
19
Digital Output 0 to 15
19
Page 45 of 69
Fault Diagnostics and Control System
Stesalit Limited
Signal Name
Digital Output 16 to 31
No. Of Pins 19
Connector type on FDCS Unit 97B3102F-2214SW
Connector type on Cable
Cable type and length in meter 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 19 Core shielded Teflon wire (1 sq. mm dia each) 6m length 3 Core shielded Teflon wire (1 sq. mm dia each)
Digital Output 32 to 47
19
Digital Output 48 to 63
19
Digital Output Spare
19
110V DC Power Supply
FDCS Unit side 97B3102R-22- 14PW, SB side: 2.5mm Lugs 97B3102F-22FDCS Unit side 14SX 97B3102R-22- 14PX SB side: 2.5mm Lugs 97B3102F-22FDCS Unit side 14SY 97B3102R-22- 14PY SB side: 2.5mm Lugs 97B3102F-22FDCS Unit side 14SZ 97B3102R-22- 14PZ SB side: 2.5mm Lugs 97B3102R-10- SL FDCS Unit side 3P 97B3102F-10-SL 3S SB side: 2.5mm Lugs
B. FDCS Unit to Display unit:
Signal Name Transmit, Receive and Power Signals For CAB A Transmit, Receive and Power Signals For CAB B No. Of Pins 10 Connector type on Connector type on FDCS Unit Cable 97B3102R-18-1PX FDCS Unit side 97B3102R-18-1SX Display Unit side 97B3102R-18-1S 97B3102R-18-1PY FDCS Unit side 97B3102R-18-1SY Display Unit side 97B3102R-18-1S Cable type and length in meter 23m length 10 Core shielded Teflon wire (1 sq. mm dia each) 8m length 10 Core shielded Teflon wire (1.5 sq. mm dia each)
10
C. Display Unit to Terminal SB:
Signal Name 110V DC Power Supply to CAB A Display Unit 110V DC Power Supply to CAB B Display Unit No. Of Pins 3 Connector type on FDCS Unit 97B3102R-10-SL 3P Connector type on Cable Display Unit side 97B3102F-10-SL 3S SB side: 2.5mm Lugs FDCS Unit side 97B3102F-10-SL 3S SB side: 2.5mm Lugs Cable type and length in meter 8m length 3 Core shielded Teflon wire (1.5 sq. mm dia each) 8m length 3 Core shielded Teflon wire (1.5 sq. mm dia each)
97B3102R-10-SL 3P
Page 46 of 69
Fault Diagnostics and Control System
Stesalit Limited
D. FDCS Unit to Signal Conditioning Unit:
Signal Name AUX, AUX_R, Battery and TM Armature Voltage No. Of Pins 10 Connector type on FDCS Unit 97B3102R-18-1S Connector type on Cable FDCS Unit side 97B3102R-18-1P Signal Cond. Unit side 97B3102R-18-1P Cable type and length in meter 2.5m length 10 Core shielded Teflon wire (1 sq. mm dia each)
E. Signal Conditioning Unit to SB Terminal:
Signal Name No. Of Pins Connector type on Sig. Conditioning Unit Terminals Connector type on Cable Connector Cable type and type on Length in meter SB Terminal provided by CLW Terminal provided by CLW 2.5m length 10 Core shielded Teflon wire (1 sq. mm dia each) 2.5m length 10 Core shielded Teflon wire (1 sq. mm dia each)
AUX, AUX_R Output Voltages
Lugs in both side
TM Armature Voltage, Battery
Terminals
Lugs in both side
F. FDCS Unit to TM Current Sensor Unit 1:
Signal Name No. Of Pins 8 Connector type on FDCS Unit 97B3102R18-8PW Connector type on Cable Cable type and length in meter
Traction Motor Current 1, 2 ,3 & 4
FDCS Unit side 97B3102R-18- 19m length 8 Core 8SW , TM Current Sensor Unit1 Teflon shielded wire side 97B3102R-18-8SW (1sq. mm dia each)
G. TM Current Sensor Unit1 to SHUNT:
Signal Name No. Of Pins 5 Connector type on Connector type TM Current on Cable Sensor Unit 1 Terminals Lugs in both side Connector type on SB Terminal provided by CLW Cable type and Length in meter 2.5m length Teflon Wire (3 sq. mm dia each)
TM Current1, 2, 3 &4
H. FDCS Unit to TM Current Sensor Unit 2:
Signal Name Traction Motor Current 5 , 6, 7 & 8 No. Of Pins 8 Connector type on FDCS Unit 97B3102R-188PZ Connector type on Cable FDCS Unit side 97B3102R-188SZ , TM Current Sensor Unit1 side 97B3102R-18-8SZ Cable type and length in meter 19m length 8 Core Teflon shielded wire (1sq. mm dia each)
Page 47 of 69
Fault Diagnostics and Control System
Stesalit Limited
I. TM Current Sensor Unit2 to SHUNT:
Signal Name No. Of Pins Connector type on TM Current Sensor Unit 1 Terminals Connector type on Cable Connector type on SB Cable type and Length in meter 2.5m length Teflon Wire (3 sq. mm dia each)
TM Current 5, 6, 7 &8
Lugs in both side
Terminal provided by CLW
2. A.
Wire Details for FDCS-9648 of Electric Locomotive: Connector Number: Digital Input 1 Connector Type: 22-14P
Name Of Input BP1DJ/BLDJ BP2DJ/BLRDJ QVMT1 QVMT2 QVRH ZPT1_2 ZPT1_1 HVMT1_1 HVMT1_2 HVMT2_1 HVMT2_2 HVRH_1 HVRH_2 QVSI1/HVSI1 QVSI2/HVSI2 BLVMT Screen Display Name BLDJ BLRDJ QVMT1 QVMT2 QVRH ZPT1_2 ZPT1_1 HVMT1_1 HVMT1_2 HVMT2_1 HVMT2_2 HVRH_1 HVRH_2 Q/H_VSI1 Q/H_VSI2 BLVMT Pin No. N1-A N1-B N1-C N1-D N1-E N1-F N1-G N1-H N1-J N1-K N1-L N1-M N1-N N1-P N1-R N1-S Wire No. 021 024 025 026 027 030 029 036 037 038 039 040 041 042 043 070 SB No. SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1
Input No. I-0 I-1 I-2 I-3 I-4 I-5 I-6 I-7 I-8 I-9 I-10 I-11 I-12 I-13 I-14 I-15
Page 48 of 69
Fault Diagnostics and Control System
Stesalit Limited
B.
Connector Number: Digital Input 2 Connector Type: 22-14PW
Name Of Input ASMGR (B.N.) BLCP/BLCPD C101_3 FB GR-0 GR-0_31 QPH/HPH QVSL1/HVSL1 C105_FB ASMGR (O.N.) QVSL2/HVSL2 MP+ (R, B) MPJ (FOR) J1,J2 (FOR) MP (+N-) R MP- (R, B) CTF (RUN) Screen Display Name GR_BN BLCP C101_3 FB GR-0 GR-0_31 Q/H_PH Q/H_VSL1 C105_FB GR_ON Q/H_VSL2 MP+ MPJ FOR J_FOR MPMP_RUN CTF_RUN Pin No. W2-A W2-B W2-C W2-D W2-E W2-F W2-G W2-H W2-J W2-K W2-L W2-M W2-N W2-P W2-R W2-S Wire No. 072 074 075 076 077 078 079 061 082 080 093 091 095 096 097 100 SB No. SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1 SB-1
Input No. I-16 I-17 I-18 I-19 I-20 I-21 I-22 I-23 I-24 I-25 I-26 I-27 I-28 I-29 I-30 I-31
C.
Connector Number: Digital Input 3 Connector Type: 22-14PX
Name Of Input MPJ (REV) CTF (BRK) MP (+,N,-) B DJ_FB J1,J2 (REV) ZQWC MPS (1-4) MPS (2-4) MPS (3-4) MPS (4-4) PVEF PSA BPQD RGEB SWC QF & QE Screen Display Name MPJ_REV CTF_BRK MP_BRK DJ_FB J_REV ZQWC MPS_1 MPS_2 MPS_3 MPS_4 PVEF PSA BPQD RGEB SWC QF_QE Pin No. X3-A X3-B X3-C X3-D X3-E X3-F X3-G X3-H X3-J X3-K X3-L X3-M X3-N X3-P X3-R X3-S Wire No. 092 212 213 105 107 121 123 124 125 126 150 151 230 155 156 162 SB No. SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2
Input No. I-32 I-33 I-34 I-35 I-36 I-37 I-38 I-39 I-40 I-41 I-42 I-43 I-44 I-45 I-46 I-47
Page 49 of 69
Fault Diagnostics and Control System
Stesalit Limited
D.
Connector Number: Digital Input 4 Connector Type: 22-14PY
Name Of Input BL QOA/QSIT* QOP1 QOP2 QRSI1 QRSI2 QLM BV C106_FB ZSMGR ZSMS RSI HMCS L1 to L6_FB HMCS & QD
C118 (N/C)/ QCON*
Input No. I-48 I-49 I-50 I-51 I-52 I-53 I-54 I-55 I-56 I-57 I-58 I-59 I-60 I-61 I-62 I-63
Screen Display Name BL QOA QSIT QOP1 QOP2 QRSI1 QRSI2 QLM BV C106_FB ZSMGR ZSMS RSI HMCS L1_6_FB HMCS_QD C118_NC QCON
Pin No. Y4-A Y4-B Y4-C Y4-D Y4-E Y4-F Y4-G Y4-H Y4-J Y4-K Y4-L Y4-M Y4-N Y4-P Y4-R Y4-S
Wire No. 142 017 046 047 048 049 050 122 062 128 120 170 058 028 153 018
SB No. SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-2 SB-3A SB-3A SB-3A SB-3A SB-3A SB-3A SB-3A SB-3A SB-3A
E.
Connector Number: Digital Input 5 Connector Type: 22-14PZ
Screen Display Name QLA_FB SI INT FLT QPDJ_FB C107_FB SI EXT FLT C145 N/O HQ51 CHBA BL1 SW_DBR P2_ACP BLFL BPT P1_ACP BPSW_ACK Pin No. N5-A N5-B N5-C N5-D N5-E N5-F N5-G N5-H N5-J N5-K N5-L N5-M N5-N N5-P N5-R N5-S Wire No. 019 052 060 068 059 200 973 149 157 219 216 217 218 203 SB No. SB-3A SB-3A SB-3A NOT IN WAP
Input No. Name Of Input QLA_FB/ SI INT I-64 FAULT* I-65 QPDJ_FB I-66 C107_FB I-67 SI EXT FAULT* I-68 C145 N/O I-69 I-70 HQ51 I-71 CHBA I-72 BL1 I-73 SWITI/DBR I-74 I-75 RGAF/P2(ACP) I-76 BLFL I-77 BPT I-78 RGPA/P1(ACP) I-79 BPSW1/2/ACK (ACP)
SB-3A SB-2B SB-3A SB-2A SB-2A SB-2A SB-2A SB-2A
Page 50 of 69
Fault Diagnostics and Control System
Stesalit Limited
F.
Connector Number: Digital Input 6 (Spare Inputs) Connector Type: 20-29P
Name Of Input LOCO SEL 1 LOCO SEL 2 LOCO SEL 3 LOCO SEL 4 MU_FB BPEMS-1&2 Screen Display Name L_SEL 1 L_SEL 2 L_SEL 3 L_SEL 4 MU_FB BPEMS-1&2 Pin No. A B C D E F Wire No. B700 700 B237 067 SB No.
Input No. I-80 I-81 I-82 I-83 I-84 I-85 I-86 I-87 I-88 I-89 I-90 I-91 I-92 I-93 I-94 I-95
WAG ONLY
Q49_FB
WAG ONLY
G.
Connector Number: Digital Input 6 (REDUNDANT INPUTS) Connector Type: 20-29P
Name Of Input BVSI1 / HVSI1 QPH / HPH QVSL1/HVSL1 QVSL2/HVSL2 QOA / QSIT QOP1 QOP2 QRSI1 QRSI2 QLM QLA/SI INT FAULT QCON / C118-N/C BL BLVMT BLCP / BLCPD Screen Display Name Q/H_CSI1 Q/H_PH Q/H_VSL1 Q/H_VSL2 QOA QSIT QOP1 QOP2 QRSI1 QRSI2 QLM QLA C118_NC/QCON* BL BLVMT BLCPD Pin No. A B C D E F G H J K L M N P R S Wire No. 043 078 079 080 017 046 047 048 049 050 019 018 142 070 074 SB No.
Input No. I-96 (I-14) I-97 (I-21) I-98 (I-22) I-99 (I-25) I-100 (I-49) I-101 (I-50) I-102 (I-51) I-103 (I-52) I-104 (I-53) I-105 (I-54) I-106 (I-64) I-107 (I-63) I-108 (I-48) I-109 (I-15) I-110 (I-17) I-111
Page 51 of 69
Fault Diagnostics and Control System
Stesalit Limited
I.
Connector Number: Digital Output 1 Connector Type: 22-14S
Name Of Output DJ C118/BLSI* VEPT1 VEPT2 DJ C107 C106 C105 C101, C103 VEUL J1,J2 (FOR) J1,J2 (REV) CTF (RUN) CTF (BRK) VE (UP) C145 Screen Display Name DJ C118 / BLSI VEPT1 VEPT2 DJ C107 C106 C105 C101_3 VEUL J_FOR J_REV CTF_RUN CTF_BRK VE_UP C145 Pin No. A B C D E F G H J K L M N P R S Wire No. 044 035 055 056 044 083 084 085 086 087 108 109 111 112 110 114 SB No. SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3
Output No. O-0 O-1 O-2 O-3 O-4 O-5 O-6 O-7 O-8 O-9 O-10 O-11 O-12 O-13 O-14 O-15
J.
Connector Number: Digital Output 2 Connector Type: 22-14SW
Name Of Output VE (DN) EVPHGR Sx1 Sx2 Sx31 Sx32 IP VESA2 VEF VESA1 L1, L2, L3 L4, L5, L6 LSDJ (R) LSCHBA (G) LSGR (G) LSB (Y) Screen Display Name VE_DN EVPHGR Sx1 Sx2 Sx31 Sx32 IP VESA2 VEF VESA1 L1_3 L4_6 LSDJ LSCHBA LSGR LSB Pin No. A B C D E F G H J K L M N P R S Wire No. 113 115 129 130 131 132 166 165 164 163 143 133 171 172 173 174 SB No. SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-4 SB-4 SB-4 SB-4 SB-4
Output No. O-16 O-17 O-18 O-19 O-20 O-21 O-22 O-23 O-24 O-25 O-26 O-27 O-28 O-29 O-30 O-31
Page 52 of 69
Fault Diagnostics and Control System
Stesalit Limited
K.
Connector Number: Digital Output 3 Connector Type: 22-14SX
Name Of Output LSP (R) LSRSI (Y) Sx41 Sx42 LSGROUP (R) LSOL (Y) LSFL SON (ALARM) Q51_52 FB_MU QFL LSDBR (Y) Q49_MU FL_LP C102 C108 Screen Display Name LSP LSRSI Sx41 Sx42 LS_GRP LSOL LSFL SON Q51_52 FB_MU QFL LSDBR Q49_MU FL_LP C102 C108 Pin No. A B C D E F G H J K L M N P R S Wire No. 175 176 144 145 235 210 232 177 236 234 SB No. SB-4 SB-4 WAP ONLY WAP ONLY WAG ONLY SB-4 SB-4 SB-4 WAG ONLY SB-4 SB-4 SB-4 WAG ONLY SB-4 WAG ONLY WAG ONLY
Output No. O-32 O-33 O-34 O-35 O-36 O-37 O-38 O-39 O-40 O-41 O-42 O-43 O-44 O-45 O-46 O-47
L. Connector Number: Digital Output 4 (REDUNDANT OUTPUTS) Connector Type: 22-14SY
Output No. O-48 (O-0) O-49 (O-1) O-50 (O-2) O-51 (O-3) O-52 (O-0) O-53 (O-5) O-54 (O-6) O-55 (O-7) O-56 (O-8) O-57 (O-16) O-58 (O-10) O-59 (O-11) O-60 (O-12) O-61 (O-26) O-62 (O-14) O-63 (O-27) Name Of Output DJ C118/BLSI* VEPT1 VEPT2 DJ C107 C106 C105 C101, C103 VE (DN) J1,J2 (FOR) J1,J2 (REV) CTF (RUN) L1,L2,L3 VE (UP) L4,L5,L6 Screen Display Name DJ C118 BLSI VEPT1 VEPT2 DJ C107 C106 C105 C101,C103 VE_DN J_FOR J_REV CTF_RUN L1_3 VE_UP L4_6
Page 53 of 69
Pin No. A B C D E F G H J K L M N P R S
Wire No. 044 035 055 056 044 083 084 085 086 113 108 109 111 143 110 133
SB No. SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-3 SB-4
Fault Diagnostics and Control System
Stesalit Limited
Connector Number: Display for CAB A Connector Type: 18-1P X
Name Of Signal TRANSMIT +VE SIGNAL TRANSMIT -VE SIGNAL RECEIVE +VE SIGNAL RECEIVE -VE SIGNAL GROUND GROUND GROUND Pin No. A B C D H I J Wire No. TX P TX N RX P RX N GROUND GROUND GROUND
Connector Number: Display for CAB A Connector Type: 18-1P Y
Name Of Signal TRANSMIT +VE SIGNAL TRANSMIT -VE SIGNAL RECEIVE +VE SIGNAL RECEIVE -VE SIGNAL GROUND GROUND GROUND Pin No. A B C D H I J Wire No. TX P TX N RX P RX N GROUND GROUND GROUND
Connector Number: Analog Input (Signal Conditioning) Connector Type: 18-1S
Name Of Input ANG1 TM ANG2 BAT ANG3 W ANG4 AUX ANG5 AUX +12V AGND Pin No. A B C D E H J Wire No. AI1 AI2 AI3 AI4 AI5 +12V ANGND
Connector Number: TM Current Sensing Unit1 Connector Type: 18-8PW
Name Of Input ANG6 TM CURRENT 1 ANG7 TM CURRENT 2 ANG8 TM CURRENT 3 ANG9 QE +12V AGND Pin No. A B C D G H Wire No. AI6 AI7 AI8 AI9 +12V ANGND
Page 54 of 69
Fault Diagnostics and Control System
Stesalit Limited
Connector Number: TM Current Sensing Unit1 Connector Type: 18-8PZ
Name Of Input ANG6 TM CURRENT 4 ANG7 TM CURRENT 5 ANG8 TM CURRENT 6 ANG9 - SPARE +12V AGND Pin No. A B C D G H Wire No. AI10 AI11 AI12 SPR +12V ANGND
Terminal Number: 1(Signal Conditioning Unit) Terminal Type: 7 Pins H/V Terminal
Name of Input W AUX AUXR A.C RTN TM CHBA D.C GND Pin Number 1 2 3 4 5 6 7 Wire Number 991 991 991 993 A17 SGND
Terminal Number: 2(TM Current Sensing Unit1) Terminal Type: 6 Pins H/V Terminal
Name of Input TM1+ TM1 GND TM2+ TM2 GND TM3+ TM3 GND Pin Number 1 2 3 4 5 6 Wire Number 196 197 208 209 206 207
Terminal Number: 3(TM Current Sensing Unit2) Terminal Type: 6 Pins H/V Terminal
Name of Input TM4+ TM4 GND TM5+ TM5 GND TM6+ TM6 GND Pin Number 1 2 3 4 5 6 Wire Number 214 215 247 248 249 250
Page 55 of 69
Fault Diagnostics and Control System
Stesalit Limited
b. LIST OF ELIMINATED RELAYS:
I/P NUMBER I-112 I-113 I-114 I-115 I-116 I-117 I-118 I-119 I-120 I-121 I-122 I-123 I-124 I-125 I-126 I-127 I-128 I-129 I-130 I-131 I-132 I-133 I-134 I-135 NAME
Q20 Q30 Q44 Q45 Q46 Q48 Q49 Q50 Q51 Q52 Q100 (ARNO) / Q101(SI) Q118 Q119 Q121 QV60 QV61 QV62 QV63 QV64 QCVAR QRS QTD105 QTD106 QWC
I/P NUMBER I-136 I-137 I-138 I-139 I-140 1-141 I-142 I-143 I-144 I-145 I-146 I-147 I-148 I-149 I-150 I-151 I-152 I-153 I-154 I-155 I-156 I-157 I-158 I-159
NAME
QVLSOL GR 0-1 GR 0-5 GR 0-10 GR 6-32 GR 20-32 QSVM (SI)
Q120
QD1 QD2 QE QF1 QF2
Page 56 of 69
Fault Diagnostics and Control System
Stesalit Limited
12. Trouble shooting Procedure of FDCS 9648
Check the wirings and Voltage level on the SB Terminals of the system
NO Are all ok?
YES Check the CPU LEDs
YES Is Sys Ok LED ON? NO YES Is PSU alarm LED ON? NO NO
SYSTEM IS OK
Check PSU Card
Is 2/2 LED ON? YES
Check the other CPU card
Is Display LED ON?
YES
One of the Display Systems is not communicating, check the display cable and if the cable is OK change the display CPU card.
Page 57 of 69
Fault Diagnostics and Control System
Stesalit Limited
YES Is Error in I/P LED ON? NO YES Is Error in OP LED ON? NO
Change Digital Input Card
Change Output Card
Is Error in Analog I/P LED ON? NO
YES
Change Analog Input Card
Is Shut Down LED ON? NO SYSTEM IS OK
YES
Check for other errors indication and take corresponding action
Page 58 of 69
Fault Diagnostics and Control System
Check the PSU Card
Stesalit Limited
Check the PSU LEDs
Is PSU ON NO
YES
PSU IS OK
Is IP Over voltage LED ON?
YES
Lower the Input Voltage
NO YES
Is IP Under voltage LED ON?
Increase the Input Voltage
NO
Is +5V Over voltage LED ON?
YES
NO
Is +5V Under voltage LED ON?
YES
NO
Change the PSU card YES
Is +12V Over voltage LED ON?
NO YES
Is +12V Under voltage LED ON?
NO
Page 59 of 69
Fault Diagnostics and Control System
Stesalit Limited
Output Not Coming from FDCS
Check the corresponding Output Logic and then check O/P cards LED
Is LED ON? YES
NO
Change the corresponding O/P card
Check Voltage at BD panel
Available
Check Loco side wiring/Check the Relay
NOT AVAILABLE NOT OK
Check Wiring bet. BD Panel & FDCS Coupler
Repair the damage portion of wiring
OK
Page 60 of 69
Fault Diagnostics and Control System
Input Not Coming from LOCO side to FDCS
Stesalit Limited
Check the corresponding Input switch and then check I/P cards LED
Is LED ON? NO
YES
Check in Display Unit. Input must ON, else change corresponding card
Check Voltage at BD panel
Not Available
Check Loco side wiring/Check contact
AVAILABLE NOT OK
Check Wiring bet. BD Panel & FDCS Coupler
Repair the damage portion of wiring
OK
13. OPERATION OF THE DISPLAY UNIT There are five keys such as MENU, UP, DOWN, ENTER, and ACK Keys in the keyboard of the Display unit. The unit has also one 4X40 character LCD with backlight and a two digit seven segment LED. The default LCD screen shows the date and time. The seven segments LED shows the current notch number. By using the keyboard the current working status and information can be shown in the display screen. By pressing the MENU key at any time the following display screen will be shown
DATE: *****************MAIN MENU****************** 1. VEHICLE DIAGNOSTIC 2. PROCESS INFORMATION TIME:
The shows the current cursor position. To select an option move the cursor UP or DOWN position.
Page 61 of 69
Fault Diagnostics and Control System
Stesalit Limited
To see the VEHICLE DIAGNOSTIC information, press the ENTER key, then the display screen will be shown like the follows DATE: LOCO OK 1 ISOLATION INFORMATION 2 CURRENT FAULT INFORMATION 3 FAULT HISTORY TIME:
Now if the PROCESS INFORMATION option is selected then the display screen is shown as follows 1 Input/Output Display 2 Parameter Setting 3 Test Mode.
If the INPUT-OUTPUT option is selected then the display screen is shown as follows 1. 2. 3. 4. Display Digital Input Display Digital Output Display Eliminated Relays Display Analog Parameters
13.1.1 Display Digital Input (Use UP/DOWN keys to move next/previous
screen) The following information is shown if the DISPLAY DIGITAL INPUT option is selected DATE: 10101010 10101010 10101010 LOCO OK 10101010 10101010 10101010 10101010 10101010 00000000 TIME: 10101010 10101010 00000000
Here the first digit is showing the status of the Digital Input 0,the second digit is showing the Digital Input 1. A 1 shows that the input is in OFF state (Low), whereas a 0 shows that the input is in ON state (High). Now by scrolling the screen with the help of UP DOWN key the various input status individually can be shown.
Page 62 of 69
Fault Diagnostics and Control System
Stesalit Limited
One card inputs are defined in two screens. Each screen has 8 inputs like: 1st screen of card-1 1st line 2nd line 3 inputs 3rd line 3 inputs 4th line 2 inputs 2nd screen of card-1 1st line 2nd line 3 inputs 3rd line 3 inputs 4th line 2 inputs
DIGITAL INPUT CARD-1_2 DIGITAL INPUT BLDJ =_ QVMT2 =_ BLRDJ QVRH =_ CARD-1_1 QVTM1 =_
ZPT1_1
=_
=_ HVMT1_1 =_
ZPT1_2
=_
HVMT1_2 HVRH_1 Q/H_VSI2
=_ =_ =_
HVMT2_1 HVRH_2 BLVMT
=_ =_ =_
HVMT2_2 =_ Q/H_VSI1 =_
All the digital inputs are shown in the same format for display.
13.1.2. Display Digital Output (Use UP/DOWN keys to move next/previous
screen) One card outputs are defined in two screens. Each screen has 8 inputs like: 1st screen of card-1 1st line 2nd line 3 outputs 3rd line 3 outputs 4th line 2 outputs 2nd screen of card-1 1st line 2nd line 3 outputs 3rd line 3 outputs 4th line 2 outputs
DIGITAL OUTPUT CARD-1_2 DIGITAL OUTPUT CARD-1_1
DJ VEPT2 C106
=_ =_ =_
C118 /BLSI =_ DJ =_ C105 =_
VEPT1 C107
=_ =_
C101_3 J_REV VE_UP
=_ =_ =_
VEUL =_ CTF_RUN =_ C145 =_
J_FOR =_ CTF_BRK =_
All the digital outputs are shown in the same format for display.
13.1.3. Eliminated Relays Display
ELIMINATED RELAYS Q20 =_ Q30 =_ Q46 =_ Q48 =_ Q51 =_ Q52 =_ Screen-1 Q45 =_ Q50 =_ Q119 =_
Q44 Q49 Q118
=_ =_ =_
Page 63 of 69
Fault Diagnostics and Control System
Stesalit Limited
ELIMINATED RELAYS Q120 =_ QBI =_ QD2 =_ QF1 =_ QTD105 =_ QTD106 =_ ELIMINATED RELAYS QV62 =_ QV63 QWC =_ =_
QCVAR =_ QF2 =_ QV60 =_ QV64
Screen-2 QD1 =_ QRS =_ QV61 =_
Screen-3 =_ QVSOL =_
13.1.4. Display Analog Parameters
1. Analog Voltages
2. TM Currents
ANALOG Voltage
CHBA Voltage =___Vdc TM Voltage = _____ Vdc ARNO Voltage =___ Vac Aux. Voltage= _____ Vac Aux. Voltage (RDT) = _____ Vac
TM Currents
TM-1 = ____ A TM-4 = ____ A
TM-2 = ____ A TM-5 = ____ A
TM-3 = ____A TM-6 = ____A
13.1.5. Parameter Setting
PARAMETER SETTING
1. Loco No. 2. Date 3. Time
Note: Once any above operation is selected system will prompt for password which is to be entered. It should be possible to set desired parameters. Password: 123456 Password should be in 6 digits which will be settable from left to right by the UP or DOWN keys. (UP key = incremented and DOWN key =
Page 64 of 69
Fault Diagnostics and Control System
Stesalit Limited
decremented). The time between operations of adjacent keys will be not more than 02 sec after next digit will STAR. All the entries should be making same as password feeded. The following information is shown if the DISPLAY DIGITAL INPUT option is selected DATE: 10101010 10101010 10101010 LOCO OK 10101010 10101010 10101010 10101010 10101010 00000000 TIME: 10101010 10101010 00000000
Here the first digit is showing the status of the Digital Input 0,the second digit is showing the Digital Input 1. A 1 shows that the input is in OFF state (Low), whereas a 0 shows that the input is in ON state (High). Now by scrolling the screen with the help of UP DOWN key the various input status individually can be shown.
Fault Messages: S. No. 1. Signal Condition C118 Feedback contact found open before energizing DJ C118 Feedback contact found closed while DJ is being energized No OHE at the time of DJ closing (BLRDJ is ON) OHE Power fail while Running DJ Tripping due to QOP 1(Earth Fault) DJ Tripping due to QOP 2 (Earth Fault) DJ Tripping due to QOA (Over Current in Auxiliary Circuit) Displayed Message on LCD C118 N/C Contact Fail. Ensure C118 Opening Do not Press BLRDJ C118 Stuck Up. Ensure opening of C118 release BLRDJ if Pressed No Tension, wait for OHE Voltage. Retry to close DJ OHE Low / No Tension. Apply Emergency Brake DJ Tripped Via QOP 1.Reset QOP-1, Isolate faulty TM by HMCS1 follow TSD, Inform TLC DJ Tripped Via QOP 2.Reset QOP-2, Isolate faulty TM by HMCS2 follow TSD, Inform TLC DJ Tripped Via QOA. Check all Auxiliary / Heater put HQOA at 0, Follow TSD Action By System
2. 3. 4. 5.
6.
7.
Page 65 of 69
Fault Diagnostics and Control System
Stesalit Limited
S. No.
Signal Condition DJ Tripping due to QRSI 1 (Over Current in Rectifier 1) DJ Tripping due to QRSI 2 (Over Current in Rectifier 2) DJ Tripping due to QLM (X-mer Over Current) DJ Tripping due to QVSL 1 (SL 1 Blower) DJ Tripping due to QVSL 2 (SL 2 Blower) DJ Tripping due to QVMT1 (MT 1 Blower) DJ Tripping due to QVMT 2 (MT 2 Blower)
Displayed Message on LCD DJ Tripped Via QRSI 1,reset QRSI1, Isolate faulty TM by HMCS1 follow TSD, Inform TLC DJ Tripped Via QRSI 2,reset QRSI2, Isolate faulty TM by HMCS2 follow TSD, Inform TLC DJ Tripped Via QLM, Check Transformer / GR Oil splashing Loco made Dead & Inform TLC DJ Tripped Via QVSL 1,check MVSL 1 if normal, Put HVSL-1 on 3 resume traction DJ Tripped Via QVSL 2,check MVSL 2 if normal, Put HVSL-2 on 3, resume Traction DJ Tripped Via QVMT 1,Check MVMT 1 if normal, Put HVMT-1 on 3 resume traction
Action By System
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
DJ Tripped Via QVMT 2, Check MVMT 2 if normal, Put HVMT-21 on 3 resume traction DJ Tripped Via QVRH, check MVRH if DJ Tripping due to QVRH normal, Put HVRH on 3 Resume Traction DJ Tripped Via QVSI 1, check MVSI DJ Tripping due to 1 if normal, Put HVSI-1 on 3 resume QVSI 1 (RSI 1 Blower) traction DJ Tripped Via QVSI 2,Check MVSI DJ Tripping due to 2 if normal, Put HVSI-2 on 3 resume QVSI 2 traction DJ Tripped Via QPH, check TFP Oil DJ Tripping due to QPH Level Frequently, put HPH on 0 & clear block section DJ Tripping due to GR Stuck DJ Tripping due to Low/ No ARNO Output DJ Tripped due to GR Stuck between notches bring GR to Zero manually, resume normal traction clear block section manually, DJ Tripped due to Low/No ARNO Voltage
Page 66 of 69
19.
20.
Fault Diagnostics and Control System
Stesalit Limited
S. No.
Signal Condition
Displayed Message on LCD DJ Tripped Via QLA isolate faulty auxiliary machine, If fault exists make loco dead inform TLC DJ Tripped Via QPDJ check RS pressure start CPA to build up pressure QVRF not working Do not use Dynamic Braking ICDJ through QOP-1 Dropped Put HQOP-1 OFF. On running condition watch HTC ICDJ through QOP-2 dropped Put HQOP-2 OFF. On running condition watch HTC ICDJ through QOA dropped Put HQOA on 0 Check auxiliary machines ICDJ through QLM Dropped Check HT Compartment for Oil Splashing inform TLC ICDJ through QRSI-1 Dropped ICDJ through QRSI-2 Dropped ICDJ through QLA Dropped Check ARNO. Inform TLC ICDJ through QPDJ Dropped Check MS Pressure / Leakage Start CPA to build pressure CTFs are neither in T nor B. Set the CTFs manually on T side only. Resume Traction GR Not in Zero. Bring GR at 0 manually. Close DJ Brake Applied Through IP Do not use DBR Auto-regression via RGEB If not Brake applied check for Leakage
Action By System
21.
DJ Tripping due to QLA
22. 23. 24.
DJ Tripping due to QPDJ Insufficient Air Flow for DBR(I-73) Unable to Close DJ due to QOP -1 Unable to Close DJ due to QOP -2 Unable to Close DJ due to QOA Unable to Close DJ due to QLM Unable to Close DJ due to QRSI -1 Unable to Close DJ due to QRSI -2 Unable to Close DJ due to QLA Unable to Close DJ due to QPDJ CTFs are neither in T nor in B at BL Key ON GR not in Zero at BL Key ON IP coil de energizes during Dynamic Braking Auto regression via RGEB
25.
26.
27. 28. 29. 30. 31.
32. 33. 34. 35.
Page 67 of 69
Fault Diagnostics and Control System
Stesalit Limited
S. No. 36.
Signal Condition Auto regression via QD Auto regression via TM Over voltage Braking Fault SWC Operated One CPU failure Display Communication fail with other CAB HVMT 1 is in Position 0 HVMT 2 is in Position 0 HVSI 1 is in Position 0
Displayed Message on LCD Auto-regression via QD Press BPQD / Resume Traction Auto-regression via TM Over Voltage. Check TM Voltage, ensure TM voltage is not more than 750V Braking Fault SWC Operated Do not use Loco Brake during DB Working with One CPU Note down in log book Other CAB Display fail HVMT 1 in Position 0. L1 L2 L3 Cut Off Half Power available HVMT 2 in Position 0. L4 L5 L6 Cut Off Half Power available HVSI 1 in Position 0 L1 L2 L3 Cut Off Half Power available HVSI 2 in Position 0 L4 L5 L6 Cut Off Half Power available Reverser not as per MPJ Position. Set manually as per MPJ CTFs not as per MP Position Set manually CTFs in traction side only C 145 Open HMCS 1/2 not in 1 Do not use DB DBR Overheated or QF/QE Operated. If QE acted do not use DBR DJ Tripped via DJ FB Fail Battery Charger Output Fail Check CHBA. Clear Block Section ICDJ through C107 Feedback Fail. Inform TLC
Action By System
37.
38. 39. 40. 41. 42. 43.
44.
HVSI 2 is in Position 0 Reverser not as per MPJ Position CTFs not as per MP Position C 145 open in DB mode due to HMCS1/2 not in 1 C145 Open in DB mode DBR Overheated DJ Tripped via DJ Feed back Fail Battery Charger Output Fail Unable to Close DJ due to C107 Feedback Fail
45.
46. 47. 48. 49. 50. 51.
Page 68 of 69
Fault Diagnostics and Control System
Stesalit Limited
S. No. 52.
Signal Condition Unable to Close DJ due to C106 Feedback Fail Unable to Close DJ due to C105 Feedback Fail GR Stuck on notches DJ Tripped via C107 Feedback Fail when DJ is energized DJ Tripped via C106 Feedback Fail when DJ is energized DJ Tripped via C105 Feedback Fail when DJ is energized DJ Tripped due to C118 N/C Contact Fail Communication with Display in CAB 2 Failed Communication with Display in CAB 1 Failed Auto regression via ACP ( Alarm Chain Pulling/ Train Parting) BPAR put in bypass mode BPAR restored Unable to close DJ due to QSIT high OHE Voltage out of Range
Displayed Message on LCD ICDJ through C106 Feedback Fail. Put HVMT-2 on 0 Clear section, Inform TLC ICDJ through C105 Feedback Fail. Put HVMT-1 on 0 Clear section, Inform TLC GR Stuck up on Notches GR Bring to 0 manually DJ Tripped via C107 Feedback Fail. Inform TLC DJ Tripped via C106 Feedback Fail. Put HVMT-2 on 0 Clear Section, Inform TLC DJ Tripped via C105 Feedback Fail. Put HVMT-1 on 0 Clear Section, Inform TLC DJ Tripped Via C118 N/C Contact Fail Communication Link Display 2 Fail Communication Link Display 1 Fail Auto-regression via ACP BPAR put in bypass BPAR restored ICDJ through QSIT Dropped SI shutdown See front panel of SI
Action By System
53. 54. 55.
56.
57.
58. 59. 60. 61. 62. 63. 64. 65.
Save message in Fault Memory Give Buzzer Output till it is acknowledged
Page 69 of 69
You might also like
- Three Phase LocoDocument85 pagesThree Phase Locodr psNo ratings yet
- Southern Railway 3 Phase Loco Study GuideDocument96 pagesSouthern Railway 3 Phase Loco Study Guideprasoon tiwariNo ratings yet
- E-70 GuideDocument103 pagesE-70 Guideanshul100% (2)
- Justine's Memoirs On Actual Freedom (Part - I)Document61 pagesJustine's Memoirs On Actual Freedom (Part - I)JustineNo ratings yet
- Cli Question BankDocument64 pagesCli Question Banksatsanh_2250% (4)
- FMEADocument10 pagesFMEAlibyanleopardNo ratings yet
- Trouble Shooting Guide WAG9x and WAP7x CCUDocument590 pagesTrouble Shooting Guide WAG9x and WAP7x CCUR S RatanNo ratings yet
- Fault DiagnosisDocument98 pagesFault DiagnosisriajulNo ratings yet
- Study of Wag 7 and Wag 9Document27 pagesStudy of Wag 7 and Wag 9afroz mohd100% (2)
- SIV Trouble-1 PDFDocument4 pagesSIV Trouble-1 PDFsatsanh_22100% (3)
- Panto EntanglementDocument6 pagesPanto EntanglementSangramjit SarkarNo ratings yet
- 3 Phase Loco Objective Questions and AnswersDocument3 pages3 Phase Loco Objective Questions and Answersjohn peter89% (9)
- Improved (Ccb2) Knorr Bremse Brake System Fitted in 3phase Electric LocomotivesDocument38 pagesImproved (Ccb2) Knorr Bremse Brake System Fitted in 3phase Electric Locomotivesjohn peter100% (11)
- 3 Phase Notes - 2Document4 pages3 Phase Notes - 2Anonymous bau06xStT67% (6)
- 1) Operation and Maintainance Manual For SVCD Rev 0Document14 pages1) Operation and Maintainance Manual For SVCD Rev 0Ravi SinghNo ratings yet
- Quick Trouble Shooting Guidelines For Three Phase Locomotives Electric Loco Shed, Lallaguda South Central RailwayDocument5 pagesQuick Trouble Shooting Guidelines For Three Phase Locomotives Electric Loco Shed, Lallaguda South Central Railwayjohn peterNo ratings yet
- TTC Class Power CKTDocument41 pagesTTC Class Power CKTDevarshi GaurNo ratings yet
- IGBT Based Auxiliary ConverterDocument28 pagesIGBT Based Auxiliary ConverterRounak Pandey89% (9)
- 8 IRAB Brake SystemDocument27 pages8 IRAB Brake SystemKhajahussain Syed85% (13)
- 3phase TSDDocument114 pages3phase TSDSridhar Chigati100% (3)
- MICRO PROCESSOR (Version 3) : Main AdvantagesDocument38 pagesMICRO PROCESSOR (Version 3) : Main AdvantagesShalem Raju KNo ratings yet
- Nodes 1Document2 pagesNodes 1els100% (1)
- Air BrakeDocument37 pagesAir Brakenirmal malviya100% (1)
- Technical Objective Bitbank TitleDocument78 pagesTechnical Objective Bitbank Titlejohn peter100% (3)
- 1-Power Circuit1.ppsxDocument2 pages1-Power Circuit1.ppsxRah MliNo ratings yet
- Loco Model Booklet 2003Document27 pagesLoco Model Booklet 2003Sankati Srinivas100% (6)
- Index: Page No Effective From Valid Till Master List No Version No 01 .01.2011 30.06.2011 CLW/MLAS/ Conv. 8.0Document49 pagesIndex: Page No Effective From Valid Till Master List No Version No 01 .01.2011 30.06.2011 CLW/MLAS/ Conv. 8.0onlyforu_1250% (1)
- WAG9 LOCO VCU Software SpecsDocument77 pagesWAG9 LOCO VCU Software SpecskishoreNo ratings yet
- Coloured Circuits Part1Document9 pagesColoured Circuits Part1satyamcafe_vidisha100% (2)
- 11 RelaysDocument42 pages11 Relaysravimeetu1375888395% (19)
- PANTO Not Raising in Three Phase LocoDocument2 pagesPANTO Not Raising in Three Phase LocoProbhat Mondal100% (1)
- 3-Phase Locomotive OverviewDocument38 pages3-Phase Locomotive OverviewDevarshi Gaur100% (3)
- Mandatory Question and Answers For Running StaffDocument57 pagesMandatory Question and Answers For Running StaffKhajahussain Syed100% (1)
- Dce 20% DKH To Tech-Iii (Electrical) 2015 Descriptive Type Questions and AnswersDocument29 pagesDce 20% DKH To Tech-Iii (Electrical) 2015 Descriptive Type Questions and AnswersmajjisatNo ratings yet
- Multiple Unit Loco OperationDocument5 pagesMultiple Unit Loco OperationmajjisatNo ratings yet
- Ac Locomotives: Trouble Shooting DirectoryDocument87 pagesAc Locomotives: Trouble Shooting Directorysubrat kumar sahooNo ratings yet
- SIVDocument60 pagesSIVJitendra Kumar Karlapudi100% (2)
- Introduction of MechatronicsDocument23 pagesIntroduction of MechatronicsSathish SatNo ratings yet
- CircuitsDocument41 pagesCircuitsriajulNo ratings yet
- Project Proposal VTP 4Document35 pagesProject Proposal VTP 4api-245643527No ratings yet
- 3-Phase Loco Item Review July 2020Document87 pages3-Phase Loco Item Review July 2020sumitshyamal100% (1)
- Troubleshooting Guide for Microprocessor Loco Fault Diagnostic Control System (FDCSDocument9 pagesTroubleshooting Guide for Microprocessor Loco Fault Diagnostic Control System (FDCSvenkatanarasaiah50% (2)
- 04-0perting Manual - SC Rly.Document107 pages04-0perting Manual - SC Rly.Krishna Mohan Chauhan100% (1)
- Loco Pilot Electric Loco Conventional Book BhusawalDocument276 pagesLoco Pilot Electric Loco Conventional Book BhusawalHarsh Vardhan Singh100% (2)
- Loco Pilot Electric Loco ABB Loco Bhusawal (Hindi)Document214 pagesLoco Pilot Electric Loco ABB Loco Bhusawal (Hindi)Harsh Vardhan Singh100% (1)
- Ifw Process GimDocument24 pagesIfw Process Gimmyownhminbox485No ratings yet
- Introductory Handbook On Microprocessor Controlled Electric Locomotives PDFDocument35 pagesIntroductory Handbook On Microprocessor Controlled Electric Locomotives PDFDinesh Mehta100% (1)
- One Word Questions On Emu/Memu/Deluxe EmuDocument12 pagesOne Word Questions On Emu/Memu/Deluxe EmuIndrasen Dewangan100% (1)
- AC Loco Question Bank For LP & ALP Ready Refreshing Their KnowledgeDocument1 pageAC Loco Question Bank For LP & ALP Ready Refreshing Their Knowledgejohn peter100% (1)
- CBC 9Document120 pagesCBC 9mukesh lachhwaniNo ratings yet
- 7 STC TRS Con 02 I Relays & SwitchesDocument47 pages7 STC TRS Con 02 I Relays & Switchesmikkumar5No ratings yet
- Air Brake Circuit of WDG4/P4 DEAD LOCODocument14 pagesAir Brake Circuit of WDG4/P4 DEAD LOCOKhajahussain Syed88% (17)
- Tripping FailuresDocument5 pagesTripping Failuresvenkatanarasaiah100% (2)
- Central Railway Accident Manual UpdatesDocument7 pagesCentral Railway Accident Manual UpdatesAditya KumarNo ratings yet
- On Latest JPO On Stabling Loads DT 18.06.21Document10 pagesOn Latest JPO On Stabling Loads DT 18.06.21Naveen Kushwaha100% (3)
- 4.STC TRS Conventional 02 e AuxiliariesDocument39 pages4.STC TRS Conventional 02 e Auxiliariesmikkumar5100% (1)
- 13 WDP4D Dual CabDocument26 pages13 WDP4D Dual CabKhajahussain Syed83% (6)
- What is a three phase locoDocument21 pagesWhat is a three phase locoAshutosh RajNo ratings yet
- 3 Phase Auxiliary Motors in WAG7Document18 pages3 Phase Auxiliary Motors in WAG7Bnr GoudNo ratings yet
- 1329993244802-Wap 7Document2 pages1329993244802-Wap 7Maria Lovella M. CapellanNo ratings yet
- Railway Ministry Revises Maintenance Schedules for Electric LocomotivesDocument3 pagesRailway Ministry Revises Maintenance Schedules for Electric LocomotivesB KRISHNA RAO0% (1)
- Overspeed Protection RetrofitsDocument2 pagesOverspeed Protection RetrofitsChakravarthy BharathNo ratings yet
- A Fail-Safe Microprocessor-Based System For Interlocking RailwaysDocument6 pagesA Fail-Safe Microprocessor-Based System For Interlocking RailwaysNikunj AggarwalNo ratings yet
- Distribution Feeder Automation SystemDocument4 pagesDistribution Feeder Automation Systemfrwbtnbtyni85653No ratings yet
- Writing Ink Identification: Standard Guide ForDocument5 pagesWriting Ink Identification: Standard Guide ForEric GozzerNo ratings yet
- HPS100 2016F SyllabusDocument6 pagesHPS100 2016F SyllabusxinNo ratings yet
- Project Management Best Practices: Achieving Global Excellence (Kerzner, H. 2006)Document3 pagesProject Management Best Practices: Achieving Global Excellence (Kerzner, H. 2006)Dwi KurniawanNo ratings yet
- David Ticknor Resume 2018 1Document1 pageDavid Ticknor Resume 2018 1api-430534745No ratings yet
- TelecomHall - Mapinfo For Telecom - Part 1Document6 pagesTelecomHall - Mapinfo For Telecom - Part 1Drio RioNo ratings yet
- Indonesian Pangasius BrochureDocument6 pagesIndonesian Pangasius BrochurerobiyullahNo ratings yet
- Cascade Approach of DWT-SVD Digital Image WatermarkingDocument5 pagesCascade Approach of DWT-SVD Digital Image WatermarkingPrashant SangulagiNo ratings yet
- Status of Technical Education in India - Emerging Issues and ChallengesDocument11 pagesStatus of Technical Education in India - Emerging Issues and ChallengesSreeram MandaNo ratings yet
- Dark Mode Log0Document2 pagesDark Mode Log0picochulo2381No ratings yet
- Mcqs Pa OrignalDocument55 pagesMcqs Pa OrignalMuhammad Youneeb100% (1)
- Munsat, S. - ProcessDocument6 pagesMunsat, S. - ProcessBen FortisNo ratings yet
- What's in The Light: Bel Air Family Investment Awarded Silver Spoon AwardDocument14 pagesWhat's in The Light: Bel Air Family Investment Awarded Silver Spoon AwardlrbrennanNo ratings yet
- Embedded Systems - Fs 2018: Figure 1: Simplified Task States Diagram in FreertosDocument8 pagesEmbedded Systems - Fs 2018: Figure 1: Simplified Task States Diagram in FreertosPhạm Đức HuyNo ratings yet
- How To Write An EssayDocument4 pagesHow To Write An EssayShah BaibrassNo ratings yet
- Davis & Pandey 2023 - Feeling Out The Rules A Psychological Process Theory of Red TapeDocument14 pagesDavis & Pandey 2023 - Feeling Out The Rules A Psychological Process Theory of Red TapeAna Maria SantosNo ratings yet
- Food Chemistry: Analytical MethodsDocument7 pagesFood Chemistry: Analytical Methodswildan ariefNo ratings yet
- GyratoryDocument4 pagesGyratoryFrancisco M. RamosNo ratings yet
- Kajo 5 PDFDocument3 pagesKajo 5 PDFJonathan ChauNo ratings yet
- Quality Concepts in DesignDocument2 pagesQuality Concepts in DesignThulasi Raman KowsiganNo ratings yet
- THREE MODELS FOR GIFTEDDocument5 pagesTHREE MODELS FOR GIFTEDWanRezawanaWanDaudNo ratings yet
- Designing Organisation StructureDocument56 pagesDesigning Organisation StructureShamanth GowdaNo ratings yet
- Public Service InnovationDocument112 pagesPublic Service InnovationresearchrepublicNo ratings yet
- Inderbitzin Chapter 1 PDFDocument16 pagesInderbitzin Chapter 1 PDFabbas raza shafqatNo ratings yet
- Cri 201 Pre Compre ExaminationDocument6 pagesCri 201 Pre Compre ExaminationKyle Adrian FedranoNo ratings yet
- Pork Carcass ChillingDocument6 pagesPork Carcass ChillingDumitru PodgorneakNo ratings yet