You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- ECU Designing and Testing Using NI ProductsDocument6 pagesECU Designing and Testing Using NI ProductsOmar Eladel MahmoudNo ratings yet
- NI Multisim FundalmentalsDocument52 pagesNI Multisim Fundalmentalsanand100% (2)
- P75 628VX V6 0 Circuit Diagram PDFDocument13 pagesP75 628VX V6 0 Circuit Diagram PDFSaidfa Fa100% (1)
- 452444.08 - Electric Diagram - RST CDocument64 pages452444.08 - Electric Diagram - RST CCarlos Andres Acosta100% (2)
- GPIO control system guideDocument13 pagesGPIO control system guideAndres Alegria80% (15)
- M14 17,5kV ABB Switchgear Type Unigear ZS1 EC01Document312 pagesM14 17,5kV ABB Switchgear Type Unigear ZS1 EC01Hendrix LevaNo ratings yet
- The Stress Relief PrescriptionDocument8 pagesThe Stress Relief PrescriptionRajesh KumarNo ratings yet
- 1TWD026202N0101Document65 pages1TWD026202N0101nknfiveNo ratings yet
- SLD 230KV LAOAG 1 SUBSTATIONDocument1 pageSLD 230KV LAOAG 1 SUBSTATIONrenz canlasNo ratings yet
- Homebuilding - Renovating-UltimateDesignBuildGuideDocument60 pagesHomebuilding - Renovating-UltimateDesignBuildGuideverivtudawNo ratings yet
- FSR & FST First Stage Regulator: Maintenance Manual FOR Authorised TechniciansDocument23 pagesFSR & FST First Stage Regulator: Maintenance Manual FOR Authorised TechniciansпавелNo ratings yet
- Non-Isolated Led Lighting Drive Ic With Built-In High-Voltage Mosfet, High PFC and High Constant Current AccuracyDocument4 pagesNon-Isolated Led Lighting Drive Ic With Built-In High-Voltage Mosfet, High PFC and High Constant Current AccuracyRRCServiceTeam AhmedabadNo ratings yet
- Bs2114f App Info An-EDocument23 pagesBs2114f App Info An-ETín SmpsNo ratings yet
- m81700fp eDocument5 pagesm81700fp eHai HeoNo ratings yet
- IRS20955S and IRS20957S: Key DifferencesDocument6 pagesIRS20955S and IRS20957S: Key DifferencesluizcpimentaNo ratings yet
- OnsemiDocument15 pagesOnsemijeos20132013No ratings yet
- KDI49QT542LNT Main Board P75-628VX V6.0 Circuit DiagramDocument13 pagesKDI49QT542LNT Main Board P75-628VX V6.0 Circuit DiagramAndres AlegriaNo ratings yet
- Obsolete Product(s) - Obsolete Product(s)Document11 pagesObsolete Product(s) - Obsolete Product(s)carlosgnNo ratings yet
- Block DiagramDocument1 pageBlock DiagramWilder Fauss LlayqueNo ratings yet
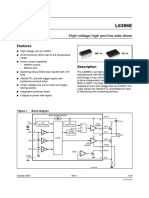
- DS L6386E So-14 Higt-Voltaje DriverDocument18 pagesDS L6386E So-14 Higt-Voltaje DriverRubén Pérez ArmasNo ratings yet
- 132 KV Abb LTB 145D1B With Fsa1 BreakerDocument6 pages132 KV Abb LTB 145D1B With Fsa1 Breakerveera chaitanyaNo ratings yet
- DSA00496247Document15 pagesDSA00496247EvaNo ratings yet
- Application Note AN-1144: IRS20957S Functional DescriptionDocument18 pagesApplication Note AN-1144: IRS20957S Functional DescriptionGerry GuadarramaNo ratings yet
- Analysis and Design LDODocument32 pagesAnalysis and Design LDONguyễn ThắngNo ratings yet
- Leem MT-8R Operating ManualDocument8 pagesLeem MT-8R Operating ManualiljicsNo ratings yet
- Multi Core Cable ScheduleDocument31 pagesMulti Core Cable Schedulevajiravel407No ratings yet
- L6386D - High-Voltage High and Low Side DriverDocument11 pagesL6386D - High-Voltage High and Low Side Driverdoppler9effectNo ratings yet
- Float Level TransmitterDocument4 pagesFloat Level TransmitterTharaka MethsaraNo ratings yet
- 2charge Pump CircuitDocument6 pages2charge Pump CircuitAbad SantNo ratings yet
- 9 - BLOK G7 - ElDocument2 pages9 - BLOK G7 - ElchepimancaNo ratings yet
- Block Diagram 1381743Document1 pageBlock Diagram 1381743Andrzej GomulaNo ratings yet
- V920 International Lamp DriverDocument24 pagesV920 International Lamp DriverOlantino Jonosis CrintolcoNo ratings yet
- Valve Remote ControlDocument537 pagesValve Remote ControlAlexander Daniel Gonzalez AguilarNo ratings yet
- Chassis Ks1c CS21A9W2Document40 pagesChassis Ks1c CS21A9W2kong3579No ratings yet
- Delta Ia-Asd A2 C FR 20090815Document20 pagesDelta Ia-Asd A2 C FR 20090815MOUHSSINE BEN HAMMOUNo ratings yet
- Transistor and Amplifier Formulas: Appendix FDocument5 pagesTransistor and Amplifier Formulas: Appendix FYONIWO EDWARD TSEMINo ratings yet
- 737-24 CL 737 300 CBTDocument103 pages737-24 CL 737 300 CBTBogdanNo ratings yet
- Ad 5220Document10 pagesAd 5220MyBriggsNo ratings yet
- LCD SSD1815Document36 pagesLCD SSD1815vuhongthuy1No ratings yet
- BootstrapDocument15 pagesBootstrapIhsan Auditia AkhinovNo ratings yet
- NCP4371 DDocument16 pagesNCP4371 DIbrahim AbbasNo ratings yet
- Optimize Output Filter On D-CAP2™ For Stability Improvement: Application ReportDocument8 pagesOptimize Output Filter On D-CAP2™ For Stability Improvement: Application ReportLeonardo SoaresNo ratings yet
- JhreeDocument16 pagesJhreegoogle manNo ratings yet
- Dual High Side DriverDocument7 pagesDual High Side DriverСаша ДыдаNo ratings yet
- Datasheet PDFDocument33 pagesDatasheet PDFPedro MoraNo ratings yet
- Product Specifications What Is Battery Charger Unit - Rectifier? Structural SpecificationsDocument4 pagesProduct Specifications What Is Battery Charger Unit - Rectifier? Structural SpecificationsMohamed AliNo ratings yet
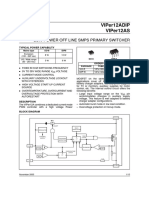
- Viper12Adip Viper12As: Low Power Off Line Smps Primary SwitcherDocument15 pagesViper12Adip Viper12As: Low Power Off Line Smps Primary SwitcherMakhou SoyoNo ratings yet
- ATA6836C: Hex Half-Bridge Driver With Serial Input ControlDocument21 pagesATA6836C: Hex Half-Bridge Driver With Serial Input ControlNgô Mạnh TiếnNo ratings yet
- Op Amp StabilityDocument32 pagesOp Amp Stabilityapdim79No ratings yet
- Module-4 - DC CHOPPER - VII-POWER ELECTRONICS - 2015-17 SchemeDocument26 pagesModule-4 - DC CHOPPER - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- L6565 Quasi-Resonant Controller: November 2002Document35 pagesL6565 Quasi-Resonant Controller: November 2002Alberto MontillaNo ratings yet
- 05-2 Power Unit PDFDocument2 pages05-2 Power Unit PDFMario RodríguezNo ratings yet
- Viper12Adip Viper12As: Low Power Off Line Smps Primary SwitcherDocument16 pagesViper12Adip Viper12As: Low Power Off Line Smps Primary Switchermohammed el erianNo ratings yet
- Half Controlled Bridge Converter ExperimentDocument4 pagesHalf Controlled Bridge Converter ExperimentAbdullah MohammedNo ratings yet
- Datasheet PDFDocument4 pagesDatasheet PDFLeila maria Palheta meloNo ratings yet
- VB325SP (Drive Bob - Ecosport)Document11 pagesVB325SP (Drive Bob - Ecosport)Joil LeandroNo ratings yet
- D D D D D D D D: DescriptionDocument20 pagesD D D D D D D D: Descriptionwaleed hsaneenNo ratings yet
- D D D D D D D D: DescriptionDocument15 pagesD D D D D D D D: Descriptionbernard smithNo ratings yet
- High-Voltage High and Low Side Driver: DescriptionDocument9 pagesHigh-Voltage High and Low Side Driver: DescriptionWanderley MoreiraNo ratings yet
- A A A ADocument21 pagesA A A AanandNo ratings yet
- PWM Fan ControllerDocument5 pagesPWM Fan ControlleranandNo ratings yet
- Workbench MultsimDocument8 pagesWorkbench MultsimanandNo ratings yet
- Start-Up Circuit For ConvertersDocument5 pagesStart-Up Circuit For ConvertersanandNo ratings yet
- Buck - Converters For Portable ApplicationDocument70 pagesBuck - Converters For Portable ApplicationanandNo ratings yet
- Diode Bridge Rectifier CapacitorDocument15 pagesDiode Bridge Rectifier Capacitoranand100% (1)
- Sensor Less Control of The BLDC MotorsDocument20 pagesSensor Less Control of The BLDC Motorsanand100% (1)
- Reading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationDocument24 pagesReading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationanandNo ratings yet
- Tutorial Quartus II Simulation VHDLDocument27 pagesTutorial Quartus II Simulation VHDLHeitor B. S. BezerraNo ratings yet
- Memory Slim CBLT PDFDocument4 pagesMemory Slim CBLT PDFMichell ben ManikNo ratings yet
- Determination of The Molecular Weight of Polymers From Viscosity MeasurementsDocument10 pagesDetermination of The Molecular Weight of Polymers From Viscosity MeasurementsAbdullah MunawarNo ratings yet
- WHLP in Reading and Writing Week 8Document4 pagesWHLP in Reading and Writing Week 8Manuel Despabiladeras0% (2)
- A Pilot's Guide To ILS PRM ApproachesDocument4 pagesA Pilot's Guide To ILS PRM ApproachesgregmNo ratings yet
- Maths ReportDocument3 pagesMaths ReportShishir BogatiNo ratings yet
- Sae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarDocument12 pagesSae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarGanesh KCNo ratings yet
- Energy Conservation Opportunities Sugar Industry IDocument8 pagesEnergy Conservation Opportunities Sugar Industry INikhil MohiteNo ratings yet
- Spatial Personality For Human Space InteractionDocument10 pagesSpatial Personality For Human Space Interactionavijitsaha bornoNo ratings yet
- 5 & 6 Risk AssessmentDocument23 pages5 & 6 Risk AssessmentAzam HasanNo ratings yet
- CSC309 Extra Credit 1Document5 pagesCSC309 Extra Credit 1Fluffy BagelzNo ratings yet
- Line BalancingDocument21 pagesLine Balancingarno6antonio6spinaNo ratings yet
- AS-9100-Rev-D Internal-Audit-Checklist SampleDocument4 pagesAS-9100-Rev-D Internal-Audit-Checklist Samplesaifulramli69No ratings yet
- Matlab 8Document6 pagesMatlab 8Robert RoigNo ratings yet
- Flaechendicht k435 de 0216 0 Eng ScreenDocument2 pagesFlaechendicht k435 de 0216 0 Eng ScreenAlexandru IonescuNo ratings yet
- Chapter 6 (Latest) - Value Orientation and Academic AchievementDocument21 pagesChapter 6 (Latest) - Value Orientation and Academic AchievementNur Khairunnisa Nezam IINo ratings yet
- VSP BrochureDocument33 pagesVSP BrochuresudhakarrrrrrNo ratings yet
- P - Issn: 2503-4413 E - Issn: 2654-5837, Hal 35 - 42: Jurnal Ekonomi Dan Bisnis, Vol. 11 No. 1 Juli 2022Document8 pagesP - Issn: 2503-4413 E - Issn: 2654-5837, Hal 35 - 42: Jurnal Ekonomi Dan Bisnis, Vol. 11 No. 1 Juli 2022Nova KartikaNo ratings yet
- MMA Electrode ClassificationDocument3 pagesMMA Electrode ClassificationRathnakrajaNo ratings yet
- Porter's Five Forces: Submitted by Subham Chakraborty PGDMDocument5 pagesPorter's Five Forces: Submitted by Subham Chakraborty PGDMSubham ChakrabortyNo ratings yet
- Anthony Robbins With Harvard Business SchoolDocument3 pagesAnthony Robbins With Harvard Business SchoolluffylovemangaNo ratings yet
- Dav Public School, Berhampur, Odisha Summer Holiday HomeworkDocument3 pagesDav Public School, Berhampur, Odisha Summer Holiday HomeworkOmNo ratings yet
- Ethics UNAM IsakDocument74 pagesEthics UNAM IsakIsak Isak IsakNo ratings yet
- Original Prusa I3 MK2S To MK3 Upgrade Parts ListDocument2 pagesOriginal Prusa I3 MK2S To MK3 Upgrade Parts ListLuan AlvesNo ratings yet
- Toms2003 A Nonlinear Finite Element Analysis of The Periodontal Ligament Under Orthodontic Tooth LoadingDocument9 pagesToms2003 A Nonlinear Finite Element Analysis of The Periodontal Ligament Under Orthodontic Tooth LoadingPuttnaree NiteNo ratings yet
- Geometric Design of Highways for Optimal Traffic FlowDocument123 pagesGeometric Design of Highways for Optimal Traffic FlowGadisa TeferaNo ratings yet