You might also like
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocFrom EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocNo ratings yet
- Manual SMC-U XYZ V3.00Document18 pagesManual SMC-U XYZ V3.00Rafael De SouzaNo ratings yet
- TCC PWMDocument3 pagesTCC PWMmojuja67% (3)
- Manual Do CLP PIC Aut R 1v5Document24 pagesManual Do CLP PIC Aut R 1v5luis gomezNo ratings yet
- Treinamento Monitores Samsung 551s 765mb 793df 793vDocument46 pagesTreinamento Monitores Samsung 551s 765mb 793df 793vLinux FirewallNo ratings yet
- Manutencao Preventiva em Motores Com o Uso Do Rele de Protecao SEL 710Document5 pagesManutencao Preventiva em Motores Com o Uso Do Rele de Protecao SEL 710fabiobertolinoNo ratings yet
- I506 V1.00-Rev.03Document32 pagesI506 V1.00-Rev.03Deyvid RabelloNo ratings yet
- Fonte Regulada Lm723 e VoltimetroDocument14 pagesFonte Regulada Lm723 e Voltimetrosilicom100% (1)
- Amplicicador AutomotivoDocument9 pagesAmplicicador AutomotivoNorberto NetoNo ratings yet
- Lista Exercicios Revisão Comandos ElétricosDocument2 pagesLista Exercicios Revisão Comandos ElétricosMarcos Santos100% (1)
- Relé Pextron PCPT4 Proteção TermicaDocument21 pagesRelé Pextron PCPT4 Proteção TermicaRodrigo RohdeNo ratings yet
- Lista de Exercicios Micriprocessadores e Micro Control AdoresDocument3 pagesLista de Exercicios Micriprocessadores e Micro Control AdoresmurillodelimaNo ratings yet
- Catalogo Adelco Equipamentos de Alta TensãoDocument2 pagesCatalogo Adelco Equipamentos de Alta TensãoRafael FreitasNo ratings yet
- Dica Técnica - Controles Eletrônicos Parte VI - Motor Zetec Rocam 1.0L SuperchargerDocument2 pagesDica Técnica - Controles Eletrônicos Parte VI - Motor Zetec Rocam 1.0L SuperchargerMárcioNo ratings yet
- Manual Do CLP PIC 1v3Document17 pagesManual Do CLP PIC 1v3Alexandre RGNo ratings yet
- WEG CFW900 Catalogo 50116501 PTDocument28 pagesWEG CFW900 Catalogo 50116501 PTManoel NetoNo ratings yet
- Relatório Motores MonofásicosDocument14 pagesRelatório Motores MonofásicosVictor SaidNo ratings yet
- Y - 02 - IDT - Reach Truck D849 Sistema Elétrico PT Rev2Document112 pagesY - 02 - IDT - Reach Truck D849 Sistema Elétrico PT Rev2Luiz Henrique LimaNo ratings yet
- Trabalho de Eletronica PDFDocument4 pagesTrabalho de Eletronica PDFRicardo FonteneleNo ratings yet
- 3 - Realizar Manutenção em Servomotor Seguindo Procedimentos TécnicosDocument11 pages3 - Realizar Manutenção em Servomotor Seguindo Procedimentos TécnicosM&F MaximoNo ratings yet
- Professor: Saulo Rodrigo BenattiDocument15 pagesProfessor: Saulo Rodrigo BenattiEmily Souza da SilvaNo ratings yet
- GrafcetDocument10 pagesGrafcetAdler Roberto SantosNo ratings yet
- 397094-Lab11 Mínimo Tca785Document5 pages397094-Lab11 Mínimo Tca785William AugustoNo ratings yet
- 11 - PerdasDocument4 pages11 - PerdasHeitor JuniorNo ratings yet
- KENWOOD TS-50S em Português BR - 3DA101Document19 pagesKENWOOD TS-50S em Português BR - 3DA101carlosNo ratings yet
- cck4300 PDFDocument23 pagescck4300 PDFleno2No ratings yet
- Manual Digital de Mensagens PDFDocument29 pagesManual Digital de Mensagens PDFElton LomboniNo ratings yet
- Manual Do ProdutoDocument44 pagesManual Do ProdutoAlexis MoyaNo ratings yet
- Datasheet Driver 7.2A NEO DMA860EDocument7 pagesDatasheet Driver 7.2A NEO DMA860EKaio Grupo OXA100% (1)
- Relatório - Exp3 - Programação em VHDL Associada A Kit Experimental - Lógica Programável - Quad5.2Document11 pagesRelatório - Exp3 - Programação em VHDL Associada A Kit Experimental - Lógica Programável - Quad5.2Fernando Henrique G. ZucatelliNo ratings yet
- Relógio Digital Com Despertador Com A Utilização Da Comunicação Sérieadores - ProjectoDocument37 pagesRelógio Digital Com Despertador Com A Utilização Da Comunicação Sérieadores - ProjectoLuís LopesNo ratings yet
- Instrucoes para Operacao TBR800Document9 pagesInstrucoes para Operacao TBR800jean alvesNo ratings yet
- Conversores DuaisDocument12 pagesConversores DuaisJohnantan SantosNo ratings yet
- Relatório de Acionamento de Máquinas ElétricasDocument10 pagesRelatório de Acionamento de Máquinas ElétricaswaynemarquesNo ratings yet
- CatalagoInversorCommanderSk PDFDocument7 pagesCatalagoInversorCommanderSk PDFMaiko de Sousa100% (1)
- Manual Do No-Break Backup UPS RS 1200BRDocument2 pagesManual Do No-Break Backup UPS RS 1200BRkeikunbrNo ratings yet
- Dica Técnica - Controles Eletrônicos Parte II - Motor Zetec RoCam 1.0L SuperchargerDocument2 pagesDica Técnica - Controles Eletrônicos Parte II - Motor Zetec RoCam 1.0L SuperchargerMárcioNo ratings yet
- WEG Soft Starter SSW 03 e SSW 04 Catalogo Portugues BRDocument12 pagesWEG Soft Starter SSW 03 e SSW 04 Catalogo Portugues BRVitor PereiraNo ratings yet
- LG 42PQ30R Dicas de Reparacao Defeitos AvariasDocument3 pagesLG 42PQ30R Dicas de Reparacao Defeitos AvariasMarcyo LimaNo ratings yet
- Trabalho de Subestação PDFDocument6 pagesTrabalho de Subestação PDFFabi SouzaNo ratings yet
- Conhecendo CuscopicDocument4 pagesConhecendo CuscopicRafael Pereira Silva0% (1)
- Medidor de Energia ABB - IDM96Document14 pagesMedidor de Energia ABB - IDM96Rafael Bispo0% (1)
- Amplificadores OperacionaisDocument9 pagesAmplificadores OperacionaissricardofNo ratings yet
- Slides Do TCCDocument32 pagesSlides Do TCCAMINTA MANZANILLANo ratings yet
- Toshiba Lc3251fda Lc4051fda Lc4651fda Lc551fda Info SCHDocument50 pagesToshiba Lc3251fda Lc4051fda Lc4651fda Lc551fda Info SCHwprokot100% (1)
- Sistemas de Supervisao e Aquisicao de DadosDocument4 pagesSistemas de Supervisao e Aquisicao de DadosdavidhellfireNo ratings yet
- Manual Acepic Pro v3.0 - Rev.dDocument12 pagesManual Acepic Pro v3.0 - Rev.dsjosjo-1No ratings yet
- Manual Tecnico Duodigit Terminal Java BGS5 EHS6 V1Document26 pagesManual Tecnico Duodigit Terminal Java BGS5 EHS6 V1DiegoNo ratings yet
- Manual Powerest HomeDocument1 pageManual Powerest HomeGuilherme EstevesNo ratings yet
- Painel DidáticoDocument3 pagesPainel DidáticoThiago AzevedoNo ratings yet
- Aula 1 - IntroduçãoDocument30 pagesAula 1 - IntroduçãoJennerPQDNo ratings yet
- Pratica 919065 2 Automacao Industrial II 1Document6 pagesPratica 919065 2 Automacao Industrial II 1Gesmar JúniorNo ratings yet
- Trabalho de Elet. de Potencia GTO, DIAC, TRIAC NathyDocument10 pagesTrabalho de Elet. de Potencia GTO, DIAC, TRIAC NathyNatália MoraesNo ratings yet
- CompensadoraDocument6 pagesCompensadoraSaulo AlvesNo ratings yet
- EA Lista02 TransistoresDocument6 pagesEA Lista02 TransistoresGleibson Cardoso100% (1)
- CUSCOPiC Lista Placa PrincipalDocument5 pagesCUSCOPiC Lista Placa PrincipalRodrigo SgarbiNo ratings yet
- Aplicando Iot Para Medir Um Voltímetro Com Esp8266 (nodemcu) Programado Em ArduinoFrom EverandAplicando Iot Para Medir Um Voltímetro Com Esp8266 (nodemcu) Programado Em ArduinoNo ratings yet
- Chapman Electric Machinery Fundamentals 5th - Solutions Manual - GearTeamDocument11 pagesChapman Electric Machinery Fundamentals 5th - Solutions Manual - GearTeamGuiNo ratings yet
- Biblioteca 2015219 PDFDocument87 pagesBiblioteca 2015219 PDFFranz C SchreiberNo ratings yet
- Manual UPSBR Mono 6-10kVADocument15 pagesManual UPSBR Mono 6-10kVARafael CordeiroNo ratings yet
- STEMAC Carenagem-Fechada 250kVADocument2 pagesSTEMAC Carenagem-Fechada 250kVADanilloFNo ratings yet
- Azdoc - Tips Tutorial CLP Weg tp02Document27 pagesAzdoc - Tips Tutorial CLP Weg tp02Diego MangiliNo ratings yet
- Guia de Boas Praticas SwitchesDocument10 pagesGuia de Boas Praticas SwitchesDiego AndersonNo ratings yet
- Relatório 1 - Eletrônica de PotênciaDocument11 pagesRelatório 1 - Eletrônica de PotênciaThamira GomesNo ratings yet
- JB-QB-5Ei Manual Sky Fire 5ei v.1.19 PDFDocument57 pagesJB-QB-5Ei Manual Sky Fire 5ei v.1.19 PDFPedro PolitecNo ratings yet
- ND20 - Rev04 - Dez 2015 PDFDocument182 pagesND20 - Rev04 - Dez 2015 PDFRonaldo Garcia RodriguesNo ratings yet
- Corsa 1.0 - 1.6 - Pick Up MPFI y GL - GLS y WagonDocument16 pagesCorsa 1.0 - 1.6 - Pick Up MPFI y GL - GLS y WagonfrancoNo ratings yet
- Contador Metaltex CTHD6-ACDocument2 pagesContador Metaltex CTHD6-ACLeandro De Paula LeiteNo ratings yet
- Trabalho de ElectroimanDocument3 pagesTrabalho de ElectroimanBene Machapule100% (2)
- 04 - Modelo Alta Frequência MOSFET - TBJDocument64 pages04 - Modelo Alta Frequência MOSFET - TBJJoão Marcelo Costa0% (1)
- Lamina Tecnica Plataforma Elevatoria Ate 4 Metros - Meia Cabina (AC11) e Cabinada (AC08) eDocument13 pagesLamina Tecnica Plataforma Elevatoria Ate 4 Metros - Meia Cabina (AC11) e Cabinada (AC08) eThiago CecconNo ratings yet
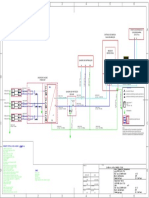
- DIAGRAMA UNIFILAR PHB15K MT-Layout1Document1 pageDIAGRAMA UNIFILAR PHB15K MT-Layout1Robson QuinagliaNo ratings yet
- ELETROSTÁTICA - LISTA 5 - Aulas 08 e 09Document8 pagesELETROSTÁTICA - LISTA 5 - Aulas 08 e 09Rodrigo PazNo ratings yet
- Efeito Ferrante PDFDocument26 pagesEfeito Ferrante PDFAlexandre DuarteNo ratings yet
- Atividade Prática Multimetro 2023Document2 pagesAtividade Prática Multimetro 2023Raphael ViniciusNo ratings yet
- UCM2811Document7 pagesUCM2811Luiz BarrosNo ratings yet
- Memorial de CalculoDocument5 pagesMemorial de CalculomateusbortoliniNo ratings yet
- Manual de Servi-O Sistema El-Trico Pajero TR4 2007Document169 pagesManual de Servi-O Sistema El-Trico Pajero TR4 2007Gordon Harris83% (18)
- Foco Clinico FA2000Document72 pagesFoco Clinico FA2000agnaldo de souza Malo100% (1)
- Atron 2013 Fusíveis e RelésDocument4 pagesAtron 2013 Fusíveis e RelésHelioNo ratings yet
- Eletrica L200 Sport HPEDocument175 pagesEletrica L200 Sport HPEMiguel Oyarzabal100% (2)
- Datasheet Emsz 335p DG 01.20Document5 pagesDatasheet Emsz 335p DG 01.20Aguinaldo JúniorNo ratings yet
- ARTIGO - Editado Os CálculosDocument8 pagesARTIGO - Editado Os CálculosJosé Wilson Oliveira SilvaNo ratings yet
- Atividades ALGETEC Laboratórios 5Document27 pagesAtividades ALGETEC Laboratórios 5Felipe Anderson PenaNo ratings yet
- 04 Lista Exercicios LEDZENERDocument2 pages04 Lista Exercicios LEDZENERJuliana AndradeNo ratings yet
- V-Vipysguvwh 1210498 - Superia 3000 d2 Instalador v2 InternetDocument6 pagesV-Vipysguvwh 1210498 - Superia 3000 d2 Instalador v2 InternetMaq QuinalhaNo ratings yet
- DownloadDocument1 pageDownloadKarina LopesNo ratings yet