You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Stress and StrainDocument42 pagesStress and StrainPaul James Thadhani100% (5)
- ElasticityDocument38 pagesElasticityPaul James ThadhaniNo ratings yet
- ElasticityDocument38 pagesElasticityPaul James ThadhaniNo ratings yet
- Wind TunnelDocument4 pagesWind TunnelPaul James ThadhaniNo ratings yet
- Construction of Passenger CarDocument3 pagesConstruction of Passenger CarPaul James Thadhani100% (1)
- SafetyDocument4 pagesSafetyPaul James ThadhaniNo ratings yet
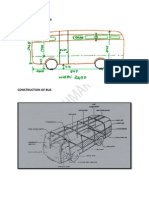
- Bus BasicsDocument3 pagesBus BasicsPaul James ThadhaniNo ratings yet
- VisibilityDocument5 pagesVisibilityPaul James ThadhaniNo ratings yet
- Aero DynamicsDocument18 pagesAero DynamicsPaul James Thadhani0% (1)
- Unit 1Document37 pagesUnit 1Paul James ThadhaniNo ratings yet
- Introduction To Vehicle Body EngineeringDocument13 pagesIntroduction To Vehicle Body EngineeringPaul James Thadhani100% (1)
- Electronics Workshop VivaDocument14 pagesElectronics Workshop VivaUsha ShanmugamNo ratings yet
- Lecture Notes - Transformer Installation PDFDocument28 pagesLecture Notes - Transformer Installation PDFYuvraj Gogoi100% (1)
- Introduction To In-Circuit TestingDocument123 pagesIntroduction To In-Circuit TestingMed Medy Fehem100% (1)
- alexia-v-owners-manualDocument54 pagesalexia-v-owners-manualHeritier NealNo ratings yet
- DC CKTDocument1 pageDC CKTKristine ManilagNo ratings yet
- SFE SIK RedBoard Guide Version3.0 OnlineDocument84 pagesSFE SIK RedBoard Guide Version3.0 OnlineBASEER AHMADNo ratings yet
- Sfe Experiment 3Document6 pagesSfe Experiment 3Zainul AriffinNo ratings yet
- Introduction To Electrical EngineeringDocument55 pagesIntroduction To Electrical Engineeringksreddy2002No ratings yet
- Valve ActuatorDocument12 pagesValve ActuatorAhrian BenaNo ratings yet
- Lab 9 The Effects of Diodes and Rectifiers in CircuitsDocument10 pagesLab 9 The Effects of Diodes and Rectifiers in Circuitsapi-709999921No ratings yet
- Denon Avr x3000Document209 pagesDenon Avr x3000louiektcNo ratings yet
- Full Download Electric Circuits 10th Edition Nilsson Solutions Manual PDF Full ChapterDocument36 pagesFull Download Electric Circuits 10th Edition Nilsson Solutions Manual PDF Full Chapterpachyunmuzzleimshbk100% (15)
- CCR1036 8G 2S+Document5 pagesCCR1036 8G 2S+EDWARD100% (2)
- q172 173hcpu Motion SFCDocument344 pagesq172 173hcpu Motion SFCNghia TranNo ratings yet
- HW #1 SolutionsDocument10 pagesHW #1 SolutionsDEEPSNo ratings yet
- Easy 512 DC RDocument13 pagesEasy 512 DC RHaris MašićNo ratings yet
- Delta-Wye Resistance Network TransformationDocument13 pagesDelta-Wye Resistance Network Transformationvillegreen9100% (2)
- Service Manual: PhilipsDocument45 pagesService Manual: Philipsjose augustoNo ratings yet
- Nbra (ABB)Document54 pagesNbra (ABB)Deepak JainNo ratings yet
- Scott R. Little, George A. Luce and Marissa E. Little - MOAC - A High Accuracy Calorimeter For Cold Fusion StudiesDocument17 pagesScott R. Little, George A. Luce and Marissa E. Little - MOAC - A High Accuracy Calorimeter For Cold Fusion StudiesRtpomNo ratings yet
- Brosur Katalog Fire Alarm HOOSEKIDocument6 pagesBrosur Katalog Fire Alarm HOOSEKIAris SucahyoNo ratings yet
- Team Revolver: EP 391 MicroprocessorsDocument21 pagesTeam Revolver: EP 391 MicroprocessorsIan BryanNo ratings yet
- 0625 s14 QP 22 PDFDocument16 pages0625 s14 QP 22 PDFHaider AliNo ratings yet
- Measure Specific Heat WaterDocument3 pagesMeasure Specific Heat WaterIbrahim Al-MutazNo ratings yet
- EE 2101L Experiment No. 3 Lab Report Elijah NeryDocument7 pagesEE 2101L Experiment No. 3 Lab Report Elijah Nerykefanytoledo417No ratings yet
- How To Use DC To DC Buck Converter LM2596Document6 pagesHow To Use DC To DC Buck Converter LM2596VanBelkumWNo ratings yet
- Sony STR De725Document58 pagesSony STR De725darkseal420No ratings yet
- E. v. Gray Analysis by William S. AlekDocument1 pageE. v. Gray Analysis by William S. Alekscribdsandu100% (1)