You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Practice ProblemsDocument322 pagesPractice Problems윤제율100% (1)
- Open Source DIY Hardware Keylogge1Document11 pagesOpen Source DIY Hardware Keylogge1babybeer666No ratings yet
- 70 412.moac - Lab.manualDocument304 pages70 412.moac - Lab.manualTakeshi Onikawara100% (2)
- NG911 Standards Identification and AnalysisDocument262 pagesNG911 Standards Identification and Analysisepraetorian100% (1)
- Network Security MeasuresDocument29 pagesNetwork Security MeasuresMohd RafeeqNo ratings yet
- PTC88C Command ManualDocument286 pagesPTC88C Command ManualBer Gabriel50% (4)
- Handout Summar Training-Telecom Networks-IDocument23 pagesHandout Summar Training-Telecom Networks-ISanyukta ...No ratings yet
- Wilkinson Power Divider Using Microstrip EBGDocument3 pagesWilkinson Power Divider Using Microstrip EBGSanyukta ...No ratings yet
- Maximally Flat Quarter-Wave Transformers TablesDocument2 pagesMaximally Flat Quarter-Wave Transformers TablesSanyukta ...No ratings yet
- OpnetDocument6 pagesOpnetSanyukta ...No ratings yet
- 05206134Document4 pages05206134Sanyukta ...No ratings yet
- Discover Your True Self: A Tibetan Personality Test in 4 QuestionsDocument24 pagesDiscover Your True Self: A Tibetan Personality Test in 4 QuestionsmaheshboobalanNo ratings yet
- PIC12F629/675 Data Sheet: 8-Pin FLASH-Based 8-Bit CMOS MicrocontrollersDocument132 pagesPIC12F629/675 Data Sheet: 8-Pin FLASH-Based 8-Bit CMOS MicrocontrollersDavid MartinezNo ratings yet
- MultiplierHDL FPGADocument11 pagesMultiplierHDL FPGAMaryum HinaNo ratings yet
- Linked ListDocument43 pagesLinked Listykudura2011No ratings yet
- Color SensorDocument1 pageColor SensorSumit JadhavNo ratings yet
- Linked ListDocument43 pagesLinked Listykudura2011No ratings yet
- Bachelor of Science in Information TechnologyDocument2 pagesBachelor of Science in Information TechnologyDavidNo ratings yet
- Digital Video Basics presentation at VSF 2010Document8 pagesDigital Video Basics presentation at VSF 2010dragon25No ratings yet
- LABSIM For CompTIA Linux+ (LX0-101, LX0-102 & LPIC-1)Document3 pagesLABSIM For CompTIA Linux+ (LX0-101, LX0-102 & LPIC-1)irshaad010% (3)
- Am29LV008B: 8 Megabit (1 M X 8-Bit) CMOS 3.0 Volt-Only Boot Sector Flash MemoryDocument38 pagesAm29LV008B: 8 Megabit (1 M X 8-Bit) CMOS 3.0 Volt-Only Boot Sector Flash MemoryandersonbheringNo ratings yet
- Operating Systems Assignment 1Document2 pagesOperating Systems Assignment 1rajeevvanchaNo ratings yet
- Manual Linksys Wrt54g v3Document61 pagesManual Linksys Wrt54g v3HenryPeñaNo ratings yet
- CDM-570L IP v1 - Module 1.6.23 Release NotesDocument5 pagesCDM-570L IP v1 - Module 1.6.23 Release NotesGUnndiNo ratings yet
- Converting From Cadence Allegro To Agilent ADSDocument12 pagesConverting From Cadence Allegro To Agilent ADSGaetano CosentinoNo ratings yet
- Social Media Size InfographicDocument1 pageSocial Media Size InfographicLuna UX/UI DesignerNo ratings yet
- WinPanel HelpDocument64 pagesWinPanel HelpisidriskyNo ratings yet
- Setting Up A Persistent Virtual Drive On Windows/XPDocument6 pagesSetting Up A Persistent Virtual Drive On Windows/XPdoss_balaramanNo ratings yet
- 6540 SHDSL PDFDocument2 pages6540 SHDSL PDFKC EIRLNo ratings yet
- Data Processing CircuitsDocument19 pagesData Processing CircuitsBhaskar MNo ratings yet
- Sher Afraz Experience LetterDocument2 pagesSher Afraz Experience LetterUzair KhanNo ratings yet
- Legacy Systems in Software Engineering Se26 25010Document38 pagesLegacy Systems in Software Engineering Se26 25010SanjaybpatelvisNo ratings yet
- 2018 Limelight Networks - The State of Online Gaming 2018 PDFDocument26 pages2018 Limelight Networks - The State of Online Gaming 2018 PDFblitzeroNo ratings yet
- Eia 608 708 CCDocument4 pagesEia 608 708 CCmastelecentroNo ratings yet
- Axe-Fx III MIDI For Third-Party Devices: SynposisDocument3 pagesAxe-Fx III MIDI For Third-Party Devices: SynposisAlan TripeNo ratings yet
- Using ClamAV in The TerminalDocument3 pagesUsing ClamAV in The TerminalsporanoxNo ratings yet
- At-S95 v20019 Cli Guide RevaDocument397 pagesAt-S95 v20019 Cli Guide RevaJamel LoubiriNo ratings yet
- Ccleaner Pro 5.57.7182 Crack + License Key (Keygen) LifetimeDocument6 pagesCcleaner Pro 5.57.7182 Crack + License Key (Keygen) Lifetimecarlos arevaloNo ratings yet
- LAN StandardsDocument41 pagesLAN StandardsNetwork BullNo ratings yet
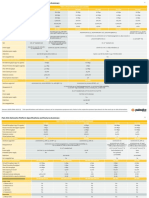
- Palo Alto Networks Product Summary SpecsheetDocument3 pagesPalo Alto Networks Product Summary SpecsheetQuang Thịnh LêNo ratings yet
- Samsung Galaxy s3 Neo Gti9301 - User ManualDocument136 pagesSamsung Galaxy s3 Neo Gti9301 - User ManualekozeljNo ratings yet
- Akruti Dynamic FontsDocument2 pagesAkruti Dynamic Fontsapi-3720975100% (1)