You might also like
- Weibull Tutorial 1Document5 pagesWeibull Tutorial 1Gthulasi78No ratings yet
- BLDC 2Document4 pagesBLDC 2Gthulasi78No ratings yet
- Weibull Tutorial 2Document6 pagesWeibull Tutorial 2Gthulasi78No ratings yet
- BLDC 2Document4 pagesBLDC 2Gthulasi78No ratings yet
- BLDC - 2 Of3Document5 pagesBLDC - 2 Of3Gthulasi78No ratings yet
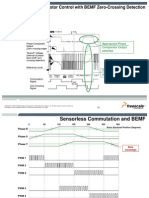
- Sensorless BLDC Motor Control With BEMF Zero-Crossing DetectionDocument6 pagesSensorless BLDC Motor Control With BEMF Zero-Crossing DetectionGthulasi78No ratings yet
- Synchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetDocument4 pagesSynchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetGthulasi78No ratings yet
- Engine Dynamic Properties - 6Document5 pagesEngine Dynamic Properties - 6Gthulasi78No ratings yet
- Brushless DC Motors Are A Type of Synchronous MotorDocument5 pagesBrushless DC Motors Are A Type of Synchronous MotorGthulasi78No ratings yet
- Engine Dynamic Properties - 7Document3 pagesEngine Dynamic Properties - 7Gthulasi78No ratings yet
- Engine Dynamic Properties - 1Document5 pagesEngine Dynamic Properties - 1Gthulasi78No ratings yet
- Reliability Prediction 1Document6 pagesReliability Prediction 1Gthulasi78No ratings yet
- Hybrid Car TechnologyDocument5 pagesHybrid Car TechnologyGthulasi78No ratings yet
- Basics of A Electric Motor: Dcmotor 1Document10 pagesBasics of A Electric Motor: Dcmotor 1Gthulasi78No ratings yet
- E-Coating Process FinalDocument3 pagesE-Coating Process FinalGthulasi78No ratings yet
- Voltage Source Inverter - 1Document7 pagesVoltage Source Inverter - 1Gthulasi78No ratings yet
- Ref Dr. A. Tolga Bozdana Notes Over The NetDocument5 pagesRef Dr. A. Tolga Bozdana Notes Over The NetGthulasi78No ratings yet
- Engine Dynamic Properties-3Document5 pagesEngine Dynamic Properties-3Gthulasi78No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CDMA APPLICATION FOR Child Name Inclusion-Before 1 Year PDFDocument2 pagesCDMA APPLICATION FOR Child Name Inclusion-Before 1 Year PDFAnonymous C0pl6hNo ratings yet
- Greenhouse Effect - WikipediaDocument7 pagesGreenhouse Effect - WikipediaalexokorieNo ratings yet
- Gold Alloy Spinnerets For The Production of Viscose RayonDocument8 pagesGold Alloy Spinnerets For The Production of Viscose RayonPhan MHanhNo ratings yet
- Single Head Nest Detail: Turbonest F644-12Mm-S355-04Document5 pagesSingle Head Nest Detail: Turbonest F644-12Mm-S355-04Vv ZzNo ratings yet
- Ms2N Synchronous Servomotors: Project Planning ManualDocument408 pagesMs2N Synchronous Servomotors: Project Planning ManualGuido PerezNo ratings yet
- Phychem Expt #2Document7 pagesPhychem Expt #2Candace AguilarNo ratings yet
- Benq mp510 Level1Document212 pagesBenq mp510 Level1Juan Duarte Lopez100% (1)
- EZstrip O&M Manual PDFDocument60 pagesEZstrip O&M Manual PDFJesus S. QuijadaNo ratings yet
- TYBTech Syllabus MechanicalDocument49 pagesTYBTech Syllabus MechanicalswapnillkNo ratings yet
- Cryogenic and Its ApplicationDocument11 pagesCryogenic and Its ApplicationBhoomika MansharamaniNo ratings yet
- CH 4Document34 pagesCH 4saadkhalisNo ratings yet
- Fire Hydrant System Design Installation Commisioning and TestingDocument5 pagesFire Hydrant System Design Installation Commisioning and Testingjaianit89No ratings yet
- Psychrometrics FormulaeDocument5 pagesPsychrometrics Formulaetmy3dataNo ratings yet
- Study of LZ77 and LZ78 Data CompressionDocument5 pagesStudy of LZ77 and LZ78 Data CompressionYa SaNo ratings yet
- ENG052010 Mechanic JD - 2Document1 pageENG052010 Mechanic JD - 2Satria SujatmikoNo ratings yet
- AASHTO GeoTechnical Design of PileDocument5 pagesAASHTO GeoTechnical Design of PiletrannguyenvietNo ratings yet
- Fortranv 7Document173 pagesFortranv 7mu4viewNo ratings yet
- Secondary Storage DevicesDocument34 pagesSecondary Storage DevicesPiyushE63No ratings yet
- Shell Spirax S6 Txme: Performance, Features & BenefitsDocument2 pagesShell Spirax S6 Txme: Performance, Features & BenefitsAbdelhadi HoussinNo ratings yet
- Plastic Roads: Presented By-Akash Chakole (First Year MBBS, GMC Nagpur)Document27 pagesPlastic Roads: Presented By-Akash Chakole (First Year MBBS, GMC Nagpur)Chandu CKNo ratings yet
- 5209 Aerospace T SealDocument20 pages5209 Aerospace T SealNicolasSuchNo ratings yet
- Glass & Glazing WorkDocument34 pagesGlass & Glazing WorkPratik ThakkarNo ratings yet
- Computation For Concrete Mix 120221Document3 pagesComputation For Concrete Mix 120221MASGRO BUILDERSNo ratings yet
- Enemy Territory - Quake Wars - ManualDocument22 pagesEnemy Territory - Quake Wars - ManualM_MolliNo ratings yet
- Wind Loads - IS 875 - Where Does Our Code of Practice StandDocument11 pagesWind Loads - IS 875 - Where Does Our Code of Practice StandRavi Kiran NandyalaNo ratings yet
- SPEC SHEET 005 AeroGlass LensDocument1 pageSPEC SHEET 005 AeroGlass LensMarco GalindoNo ratings yet
- 1.ar-315 BC&BL Lighting & IlluminationDocument28 pages1.ar-315 BC&BL Lighting & IlluminationUsha Sri GNo ratings yet
- Critical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaDocument6 pagesCritical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaMedsystem atNo ratings yet
- Modern PetrochemicalsDocument179 pagesModern PetrochemicalsHani Kirmani100% (9)
- Assimilable Organic Carbon Formation During Ultraviolet - Hydrogen Peroxide Advanced Oxidation Treatment of Surface WaterDocument207 pagesAssimilable Organic Carbon Formation During Ultraviolet - Hydrogen Peroxide Advanced Oxidation Treatment of Surface WaterMonicaRossetimNo ratings yet