You might also like
- CUDA Inline PTX AssemblyDocument8 pagesCUDA Inline PTX Assemblyppskhan5748No ratings yet
- Best Practices GuideDocument82 pagesBest Practices Guideppskhan5748No ratings yet
- CUDA C Programming GuideDocument214 pagesCUDA C Programming Guideppskhan5748No ratings yet
- CUDA Inline PTX AssemblyDocument8 pagesCUDA Inline PTX Assemblyppskhan5748No ratings yet
- 2012ModelicaCUDAParallellization v1Document2 pages2012ModelicaCUDAParallellization v1ppskhan5748No ratings yet
- Job Oppurtunities For StatiDocument1 pageJob Oppurtunities For Statippskhan5748No ratings yet
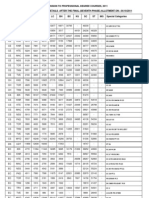
- Last Rank Phase 7Document8 pagesLast Rank Phase 7ppskhan5748No ratings yet
- Allot 2011 Other MediDocument69 pagesAllot 2011 Other Medippskhan5748No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Guia de EstudioDocument85 pagesGuia de EstudioEmmanuel Nogales GomezNo ratings yet
- Passing Beyond The Neo-Patristic Synthesis by Rev. Fr. John BehrDocument11 pagesPassing Beyond The Neo-Patristic Synthesis by Rev. Fr. John BehrSteven Abdel Messih100% (1)
- Week 2 DLL DISSDocument3 pagesWeek 2 DLL DISSRichmon Quijano100% (1)
- Activity Diagram For IWP.Document17 pagesActivity Diagram For IWP.BISMAYA DALAINo ratings yet
- The Story of A Lazy ManDocument2 pagesThe Story of A Lazy ManCalin BulinNo ratings yet
- Lesson Plan in Mathematics 10Document3 pagesLesson Plan in Mathematics 10marie padolNo ratings yet
- Network Simulator: Durga Charan Patel M.Phil (CS& IT) Pt. R.S.U RaipurDocument16 pagesNetwork Simulator: Durga Charan Patel M.Phil (CS& IT) Pt. R.S.U RaipurSMARTDCP100% (1)
- Introduction To Parallel ProgrammingDocument51 pagesIntroduction To Parallel Programminglmaraujo67No ratings yet
- PCS9875 GPSDocument2 pagesPCS9875 GPSQuân BùiNo ratings yet
- D108650GC10 - sg1 Oracle Database 19c PLSQL Workshop Vol 1Document478 pagesD108650GC10 - sg1 Oracle Database 19c PLSQL Workshop Vol 1johnroberts135490% (10)
- LTM 1100 - 4.2 Liccon2 Training - 2018 Reading Electric and Hydraulic DiagramDocument22 pagesLTM 1100 - 4.2 Liccon2 Training - 2018 Reading Electric and Hydraulic DiagramNur Muhammad HusenNo ratings yet
- QuotationDocument12 pagesQuotationRaghav RamamurthyNo ratings yet
- Chapter 4: Threads & Concurrency: Silberschatz, Galvin and Gagne ©2018 Operating System ConceptsDocument25 pagesChapter 4: Threads & Concurrency: Silberschatz, Galvin and Gagne ©2018 Operating System ConceptsTân Đinh NhưNo ratings yet
- Grammar Class 9Document9 pagesGrammar Class 9Atharva VarshneyNo ratings yet
- Software Requirements Specification ForDocument12 pagesSoftware Requirements Specification ForzaianbNo ratings yet
- RCM Level 7 SyllabusDocument7 pagesRCM Level 7 SyllabusCourtney DizonNo ratings yet
- Mar Apr 2019Document32 pagesMar Apr 2019KalyanNo ratings yet
- Oddcast Tech Note No. 5 Guidelines For Using The Vhost Text To Speech ApiDocument4 pagesOddcast Tech Note No. 5 Guidelines For Using The Vhost Text To Speech ApiAlfred Michele VolpeNo ratings yet
- Single Way and Multiway Selection-Relational and Logical OperatorsDocument10 pagesSingle Way and Multiway Selection-Relational and Logical OperatorsSreedhanya MvNo ratings yet
- Maths III Transform & Disrete PDFDocument3 pagesMaths III Transform & Disrete PDFDeepak sharmaNo ratings yet
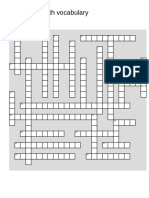
- 9th Grade Math Vocabulary 1683069284Document2 pages9th Grade Math Vocabulary 1683069284BABY MARIE APASNo ratings yet
- Mniproject Report.Document22 pagesMniproject Report.add RomitNo ratings yet
- How To Manage WindowsDocument6 pagesHow To Manage WindowsVăn-ktmt02-k14 Vũ QuýNo ratings yet
- Open Spark ShellDocument12 pagesOpen Spark ShellRamyaKrishnanNo ratings yet
- Bibliography Edu2141005Document5 pagesBibliography Edu2141005api-564736435No ratings yet
- Vaughan Review Magazine - January 2007 PDFDocument32 pagesVaughan Review Magazine - January 2007 PDFMauro NavarroNo ratings yet
- 42KhuA23 PDFDocument503 pages42KhuA23 PDFzeldasaNo ratings yet
- Soal Ukk Bahasa Inggris Kelas 2 SD PDFDocument4 pagesSoal Ukk Bahasa Inggris Kelas 2 SD PDFeenksyahNo ratings yet
- Quick Reference Sheet SCSA 1Document8 pagesQuick Reference Sheet SCSA 1Aamir MalikNo ratings yet
- 4.IRREGULAR VERBS - RO Version PDFDocument6 pages4.IRREGULAR VERBS - RO Version PDFZsuzsi SalatNo ratings yet