You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Caterpillar Monitoring System DashboardDocument41 pagesCaterpillar Monitoring System DashboardAlejandro Alberto Robalino Mendez100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Instruction Manual - Atlas Copco 1050-CD7Document104 pagesInstruction Manual - Atlas Copco 1050-CD7Ng Thiam Yong100% (1)
- Kerui XJ650 Rig WorkoverDocument29 pagesKerui XJ650 Rig WorkoverElieser MirandaNo ratings yet
- Nissan Sentra N16 Brake Service Manual PDFDocument102 pagesNissan Sentra N16 Brake Service Manual PDFmirage0706No ratings yet
- Smartcockpit Questions Answers For Airbus A 320Document78 pagesSmartcockpit Questions Answers For Airbus A 320Alina Costica100% (15)
- GDN 218Document25 pagesGDN 218Vasant Kumar Varma100% (1)
- Sauer Danfos Serie 90Document88 pagesSauer Danfos Serie 90Tavo VergaraNo ratings yet
- 06083562Document14 pages06083562Karthik CheetiralaNo ratings yet
- Hybrid CarDocument6 pagesHybrid CarKarthik CheetiralaNo ratings yet
- 05289703Document7 pages05289703Karthik CheetiralaNo ratings yet
- 04417407Document5 pages04417407Karthik CheetiralaNo ratings yet
- 04290517Document5 pages04290517Karthik CheetiralaNo ratings yet
- PtutorDocument4 pagesPtutorKarthik CheetiralaNo ratings yet
- 04147870Document6 pages04147870Karthik CheetiralaNo ratings yet
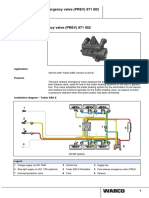
- Park-Release Emergency Valve (PREV) 971 002: ApplicationDocument4 pagesPark-Release Emergency Valve (PREV) 971 002: ApplicationОлег ДочилоNo ratings yet
- PORTABLE COMPRESSOR MANUALDocument132 pagesPORTABLE COMPRESSOR MANUALRuben NunezNo ratings yet
- 2011 Volvo XC70 SpecsDocument4 pages2011 Volvo XC70 SpecssportutilityvehicleNo ratings yet
- United States Patent: (10) Patent No.: US 6,838,782 B2Document7 pagesUnited States Patent: (10) Patent No.: US 6,838,782 B2Gepel OntanillasNo ratings yet
- 2013 Nissan 370Z Coupe Service Repair Manual PDFDocument16 pages2013 Nissan 370Z Coupe Service Repair Manual PDFfjjsjekdmmeNo ratings yet
- Automatic Transaxle System OverviewDocument9 pagesAutomatic Transaxle System OverviewWiterMarcosNo ratings yet
- Electric Tow Tug: Manufacturer of Ground Support Equipment & Material Handling EquipmentDocument2 pagesElectric Tow Tug: Manufacturer of Ground Support Equipment & Material Handling EquipmentMou BenNo ratings yet
- AMAR POLYMERS manufactures Vestas wind turbine spare partsDocument9 pagesAMAR POLYMERS manufactures Vestas wind turbine spare partsBala MuruganNo ratings yet
- Wheelbase and Trackwidth: Key Factors in Vehicle SuspensionDocument8 pagesWheelbase and Trackwidth: Key Factors in Vehicle SuspensionRaneem khaledNo ratings yet
- Kia Cee'd JD Brake SystemDocument125 pagesKia Cee'd JD Brake SystemPaulNo ratings yet
- EV-1W Motor ControllerDocument43 pagesEV-1W Motor ControllerMarioNo ratings yet
- Tvs CatalogDocument92 pagesTvs CatalogRishu MiddhaNo ratings yet
- Maintenance Intervals: Operation and Maintenance Manual ExcerptDocument61 pagesMaintenance Intervals: Operation and Maintenance Manual Excerptmontana12345100% (2)
- C172 Nav II ChecklistDocument2 pagesC172 Nav II Checklisterik_xNo ratings yet
- ABC Siemens IECMotorsDocument168 pagesABC Siemens IECMotorsFernando MuneraNo ratings yet
- Sym Symply50 Owner ManualDocument25 pagesSym Symply50 Owner ManualEdi IrimescuNo ratings yet
- Diagrama 950H PDFDocument1 pageDiagrama 950H PDFDaniel Castillo PeñaNo ratings yet
- Pullmaster Model HL25 Service Manual 00313 Rev030619275Document44 pagesPullmaster Model HL25 Service Manual 00313 Rev030619275Germán SanabriaNo ratings yet
- Honda PricesDocument7 pagesHonda Pricesmuhammad nazirNo ratings yet
- Noss Matrix P-119-1Document1 pageNoss Matrix P-119-1eizz88No ratings yet
- Pullmaster Model pl8 Service ManualDocument32 pagesPullmaster Model pl8 Service ManualSamuel Lopez BenitesNo ratings yet
- Feist TPRDocument13 pagesFeist TPRAtul ScNo ratings yet
- A Review Paper - Development of Novel Friction Material For Vehicle Brake Pad Application To Minimize Environmental and Health IssuesDocument4 pagesA Review Paper - Development of Novel Friction Material For Vehicle Brake Pad Application To Minimize Environmental and Health IssuesgarvitNo ratings yet