You might also like
- Microcontroller Based Data Acquisition System For Electrical Motor Vibrations Using VB SoftwareDocument11 pagesMicrocontroller Based Data Acquisition System For Electrical Motor Vibrations Using VB Softwaresahil satputeNo ratings yet
- JETIR2107059Document8 pagesJETIR2107059Gebrerufael GebrelibanosNo ratings yet
- Induction Motor CMDocument6 pagesInduction Motor CMAli HassanNo ratings yet
- Detecting Broken Rotor Bars With Zero-Setting ProtectionDocument12 pagesDetecting Broken Rotor Bars With Zero-Setting ProtectionBredy LaraNo ratings yet
- Hysteresis Motor Seminar ReportDocument27 pagesHysteresis Motor Seminar ReportSubham GhoshNo ratings yet
- ISA Transactions: Research ArticleDocument12 pagesISA Transactions: Research Articlemarut1999No ratings yet
- A Review of Voltage and Current Signature Diagnosis in Industrial DrivesDocument8 pagesA Review of Voltage and Current Signature Diagnosis in Industrial DrivesDaniel CastanedaNo ratings yet
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocument6 pagesEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNo ratings yet
- Motor Current Signature AnalysisDocument7 pagesMotor Current Signature AnalysisVinay Maithani CmrpNo ratings yet
- Thesis On Switched Reluctance MotorDocument4 pagesThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- Induction Motor Fault Diagnosis Using Neural NetworksDocument7 pagesInduction Motor Fault Diagnosis Using Neural NetworksAhmad TaheriNo ratings yet
- Study of Fault Detecting TechniquesDocument12 pagesStudy of Fault Detecting TechniquesprabuNo ratings yet
- Performance Monitoring of Vibration in Belt Conveyor System: S.Ojha, D. Sarangi, B.K. Pal, B.B. BiswalDocument10 pagesPerformance Monitoring of Vibration in Belt Conveyor System: S.Ojha, D. Sarangi, B.K. Pal, B.B. BiswalIlhariri Muhammad IrlisNo ratings yet
- Current Signature Analysis of Induction Motor Mechanical Faults by Wavelet Packet DecompositionDocument12 pagesCurrent Signature Analysis of Induction Motor Mechanical Faults by Wavelet Packet DecompositionarnabmtechNo ratings yet
- Machine Condition Monitoring Project Final ReportDocument11 pagesMachine Condition Monitoring Project Final ReportSivasidharth EzhilNo ratings yet
- Induction Motor Effecinecy ImprovementDocument5 pagesInduction Motor Effecinecy ImprovementabubakaarbuttNo ratings yet
- Diagnosis of Broken Rotor Bars in Induction Motor by Using Virtual InstrumentsDocument9 pagesDiagnosis of Broken Rotor Bars in Induction Motor by Using Virtual InstrumentsshashidharsmNo ratings yet
- Analysis of Advanced Techniques To Eliminate Harmonics in AC DrivesDocument8 pagesAnalysis of Advanced Techniques To Eliminate Harmonics in AC DrivessethukumarkNo ratings yet
- Investigative Fault Analysis of 11KV Slip-Ring Induction MotorsDocument12 pagesInvestigative Fault Analysis of 11KV Slip-Ring Induction MotorsInternational Journal of Innovative Science and Research Technology100% (1)
- A Review of Induction Motors Signature Analysis As A Medium For Faults DetectionDocument10 pagesA Review of Induction Motors Signature Analysis As A Medium For Faults DetectionIsrael ZamudioNo ratings yet
- Fault Detection and Diagnostics For Non-Intrusive Monitoring Using Motor HarmonicsDocument9 pagesFault Detection and Diagnostics For Non-Intrusive Monitoring Using Motor HarmonicsSumon DharaNo ratings yet
- A New Conception On On-Line Monitoring and Diagnose of TurbogeneratorsDocument11 pagesA New Conception On On-Line Monitoring and Diagnose of Turbogeneratorssanjayguha_inNo ratings yet
- Power Protection For CNC Systems Servodr PDFDocument3 pagesPower Protection For CNC Systems Servodr PDFWilber LucasNo ratings yet
- Campbell - Effect of Voltage Unbalance On Motor VibrationDocument7 pagesCampbell - Effect of Voltage Unbalance On Motor VibrationName24122021No ratings yet
- Vibration Problem Solution of High-Capacity HydropDocument6 pagesVibration Problem Solution of High-Capacity HydropManel MontesinosNo ratings yet
- Performance - Monitoring - of - Vibration - in - Belt Conveyor SystemDocument11 pagesPerformance - Monitoring - of - Vibration - in - Belt Conveyor SystemFazliJaafarNo ratings yet
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocument14 pagesVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNo ratings yet
- Online monitoring detects generator issuesDocument11 pagesOnline monitoring detects generator issuescrazy doNo ratings yet
- Induction: Rotor Cage Fault Diagnostics in Three-Phase Motors, The Instantaneous Phase-Angle Signature AnalysisDocument6 pagesInduction: Rotor Cage Fault Diagnostics in Three-Phase Motors, The Instantaneous Phase-Angle Signature AnalysiscastrojpNo ratings yet
- Monitoring Generator Vibration Reveals Previously Undetected 60 Hz SignalsDocument9 pagesMonitoring Generator Vibration Reveals Previously Undetected 60 Hz SignalsKevin Luis Perez QuirozNo ratings yet
- Decomposition Wavelet Transform As Identification of Outer Race Bearing Damage Through Stator Flow Analysis in Induction MotorDocument5 pagesDecomposition Wavelet Transform As Identification of Outer Race Bearing Damage Through Stator Flow Analysis in Induction MotorIradiratu DpkNo ratings yet
- Motor Current Signature Analysis To Detect The Fault in Induction MotorDocument4 pagesMotor Current Signature Analysis To Detect The Fault in Induction MotorDalibor Markovic100% (1)
- How To Determine The Effectiveness of Generator Differential ProtectionDocument15 pagesHow To Determine The Effectiveness of Generator Differential ProtectionAnonymous wIPMQ5rhNo ratings yet
- EECC0097Document6 pagesEECC0097Predrag PejicNo ratings yet
- Automatic Speed Control of Motor Via WAD Technique PDFDocument8 pagesAutomatic Speed Control of Motor Via WAD Technique PDFusaravanakumarNo ratings yet
- Short-Circuit Analysis of Industrial plant-IJAERDVO5IO346787 PDFDocument9 pagesShort-Circuit Analysis of Industrial plant-IJAERDVO5IO346787 PDFpriyanka236No ratings yet
- Ramachandrapuram Industry Oriented Mini-Project Report On Manufacturing of Turbo Alternator at BHELDocument34 pagesRamachandrapuram Industry Oriented Mini-Project Report On Manufacturing of Turbo Alternator at BHELraspberry piNo ratings yet
- Sensors: Signal Injection As A Fault Detection TechniqueDocument25 pagesSensors: Signal Injection As A Fault Detection TechniqueAsif ShahNo ratings yet
- Vibration Monitoring For Fault Motors Diagnosis PDFDocument8 pagesVibration Monitoring For Fault Motors Diagnosis PDFuuur35100% (1)
- Induction Motor Fault Diagnosis Using Vibration AnalysisDocument4 pagesInduction Motor Fault Diagnosis Using Vibration AnalysisAnanda CarvalhoNo ratings yet
- Detecting Faults in Three-Phase Induction MotorsDocument10 pagesDetecting Faults in Three-Phase Induction Motorsfares noureddineNo ratings yet
- Denso Report FileDocument32 pagesDenso Report FileRahul Pandey75% (4)
- Online Fault Diagnosis of MotorDocument6 pagesOnline Fault Diagnosis of MotorSundar Kumar Vasantha GovindarajuluNo ratings yet
- Introducton 1.1 Overview:: Power Transformer Protection Using Microcontroller-Based RelayDocument51 pagesIntroducton 1.1 Overview:: Power Transformer Protection Using Microcontroller-Based RelayManoj NagarajanNo ratings yet
- Condition Monitoring of El Machines Through Signal ProcessingDocument5 pagesCondition Monitoring of El Machines Through Signal ProcessingSafjrocnNo ratings yet
- Monitoring cutting signals in real timeDocument4 pagesMonitoring cutting signals in real timeToni MišićNo ratings yet
- Sesi-14 Analisis Getaran Electric Motor & TugasDocument10 pagesSesi-14 Analisis Getaran Electric Motor & Tugasyusup delopNo ratings yet
- Motor Current SignatureDocument5 pagesMotor Current Signaturel1f3b00kNo ratings yet
- Stator-Interturn-Fault Detection of Doubly Fed Induction Generators Using Rotor-Current and Search-Coil-Voltage Signature AnalysisDocument12 pagesStator-Interturn-Fault Detection of Doubly Fed Induction Generators Using Rotor-Current and Search-Coil-Voltage Signature AnalysisSaad ChakkorNo ratings yet
- Public Distribution System Using RFIDDocument4 pagesPublic Distribution System Using RFIDVimal RajanNo ratings yet
- Lifting TrainingDocument9 pagesLifting TrainingMohamed OmarNo ratings yet
- Jeas 0912 776Document10 pagesJeas 0912 776bensumbbNo ratings yet
- Ijecv8n1 03Document6 pagesIjecv8n1 03fakhriNo ratings yet
- Modal and Harmonic Analysis of Turbocharger Turbine Using Finite Element MethodDocument4 pagesModal and Harmonic Analysis of Turbocharger Turbine Using Finite Element MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- NCSOSET4Document5 pagesNCSOSET4wondi BETNo ratings yet
- TIA Grubic2011 LibreDocument8 pagesTIA Grubic2011 LibreMariut Elena LarisaNo ratings yet
- EIMTDocument4 pagesEIMTMonirul IslamNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- S3a Transformation Transfer Function State SpaceDocument7 pagesS3a Transformation Transfer Function State SpacerajeshmholmukheNo ratings yet
- S6. Finding Eigenvalues and EigenvectorsDocument5 pagesS6. Finding Eigenvalues and EigenvectorsrajeshmholmukheNo ratings yet
- Introduction to Control Systems EngineeringDocument3 pagesIntroduction to Control Systems EngineeringrajeshmholmukheNo ratings yet
- 1.2 A Defining QualityDocument1 page1.2 A Defining QualityrajeshmholmukheNo ratings yet
- 2.2 Elements of Total Quality Management PDFDocument1 page2.2 Elements of Total Quality Management PDFrajeshmholmukheNo ratings yet
- 4session 6Document8 pages4session 6rajeshmholmukheNo ratings yet
- 1.1 A QUALITY IN HISTORY PDFDocument2 pages1.1 A QUALITY IN HISTORY PDFrajeshmholmukheNo ratings yet
- 2.5 The Deming Management PhilosophyDocument1 page2.5 The Deming Management PhilosophyrajeshmholmukheNo ratings yet
- 1.2 A DEFINING QUALITY PDFDocument1 page1.2 A DEFINING QUALITY PDFrajeshmholmukheNo ratings yet
- 1.1 B The Evolution of Quality ManagementDocument2 pages1.1 B The Evolution of Quality ManagementrajeshmholmukheNo ratings yet
- 1.1 A QUALITY IN HISTORY PDFDocument2 pages1.1 A QUALITY IN HISTORY PDFrajeshmholmukheNo ratings yet
- 1.2 B Formal Definitions of QualityDocument3 pages1.2 B Formal Definitions of QualityrajeshmholmukheNo ratings yet
- 2.5 A, 2.6 B, 2.7 C The Main TheoristsDocument9 pages2.5 A, 2.6 B, 2.7 C The Main TheoristsrajeshmholmukheNo ratings yet
- Manufacturing Quality Control TechniquesDocument4 pagesManufacturing Quality Control TechniquesrajeshmholmukheNo ratings yet
- MCS Unit-VI (S36) Introduction To Advances On Control SystemDocument7 pagesMCS Unit-VI (S36) Introduction To Advances On Control SystemrajeshmholmukheNo ratings yet
- 1.3 Quality in ManufacturingDocument4 pages1.3 Quality in ManufacturingrajeshmholmukheNo ratings yet
- Introduction to Control Systems EngineeringDocument3 pagesIntroduction to Control Systems EngineeringrajeshmholmukheNo ratings yet
- Introduction to Control Systems EngineeringDocument3 pagesIntroduction to Control Systems EngineeringrajeshmholmukheNo ratings yet
- 1.1 A QUALITY IN HISTORYDocument2 pages1.1 A QUALITY IN HISTORYrajeshmholmukheNo ratings yet
- 1.1 A QUALITY IN HISTORY PDFDocument2 pages1.1 A QUALITY IN HISTORY PDFrajeshmholmukheNo ratings yet
- Introduction to Control Systems EngineeringDocument3 pagesIntroduction to Control Systems EngineeringrajeshmholmukheNo ratings yet
- S6. Finding Eigenvalues and EigenvectorsDocument5 pagesS6. Finding Eigenvalues and EigenvectorsrajeshmholmukheNo ratings yet
- S3a Transformation Transfer Function State SpaceDocument7 pagesS3a Transformation Transfer Function State SpacerajeshmholmukheNo ratings yet
- S6. Finding Eigenvalues and EigenvectorsDocument5 pagesS6. Finding Eigenvalues and EigenvectorsrajeshmholmukheNo ratings yet
- S3. State Space Representation Using Canonical VariablesDocument8 pagesS3. State Space Representation Using Canonical VariablesrajeshmholmukheNo ratings yet
- S5 Eigenvalues and EigenvectorsDocument4 pagesS5 Eigenvalues and EigenvectorsrajeshmholmukheNo ratings yet
- S2. State Space Representation Using Physical VariableDocument6 pagesS2. State Space Representation Using Physical VariablerajeshmholmukheNo ratings yet
- Unit - 3: Losses and Efficiency of DC MachinesDocument4 pagesUnit - 3: Losses and Efficiency of DC MachinesNisha JosephNo ratings yet
- Why HP Color Laserjet All-In-Ones?: - Save Time, Save CostDocument10 pagesWhy HP Color Laserjet All-In-Ones?: - Save Time, Save Costvietdark0603No ratings yet
- Test Electronic ComponentsDocument3 pagesTest Electronic Components'aleXandy OchavilloNo ratings yet
- Physics ProjectDocument11 pagesPhysics ProjectJAI PRAKASH M D100% (1)
- ELV SystemsDocument39 pagesELV SystemsPankajakumar100% (5)
- Rel-11 Description 20110624Document216 pagesRel-11 Description 20110624123mcrowleyNo ratings yet
- Installation Guide: HP Integrity rx4640 ServerDocument113 pagesInstallation Guide: HP Integrity rx4640 ServerbahmannewNo ratings yet
- 1985 D11 Hitachi Power MOSFET Data BookDocument362 pages1985 D11 Hitachi Power MOSFET Data BookTodorosss Jj100% (1)
- AIS 038 Rev2F PDFDocument105 pagesAIS 038 Rev2F PDFRohit KumarNo ratings yet
- 3 77 PDFDocument68 pages3 77 PDFviatr0nic100% (1)
- Content Beyond The SyllabusDocument3 pagesContent Beyond The SyllabusRamya SamuelNo ratings yet
- JTM60 Amplificatore Valvolare MarshallDocument5 pagesJTM60 Amplificatore Valvolare MarshallVincenzo GiulianoNo ratings yet
- AP Chemistry - Trends in The Periodic TableDocument3 pagesAP Chemistry - Trends in The Periodic Tableilias1973No ratings yet
- Remote Telemetry For Industrial Gases - DPW900 - ANOVADocument5 pagesRemote Telemetry For Industrial Gases - DPW900 - ANOVAsunshine dream50% (2)
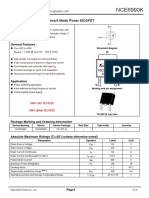
- NCE6990K: NCE N-Channel Enhancement Mode Power MOSFETDocument7 pagesNCE6990K: NCE N-Channel Enhancement Mode Power MOSFETpepenitoNo ratings yet
- Electro-Pneumatic Lift and Carry Conveying SystemDocument4 pagesElectro-Pneumatic Lift and Carry Conveying SystemIJSTENo ratings yet
- MNDCS-2024 New3 - 231101 - 003728Document3 pagesMNDCS-2024 New3 - 231101 - 003728Dr. Farida Ashraf AliNo ratings yet
- CARA PEMASANGAN RADIO KERETA DALAM 40 HURUFDocument6 pagesCARA PEMASANGAN RADIO KERETA DALAM 40 HURUFamir akmalNo ratings yet
- DC Datasheet B1enDocument19 pagesDC Datasheet B1enykcorNo ratings yet
- Noise PollutionDocument4 pagesNoise PollutionMF YousufNo ratings yet
- IoioinglesDocument6 pagesIoioinglesSailin GudhkaNo ratings yet
- Suresh Main Project of ExcitationDocument68 pagesSuresh Main Project of Excitationvenkeyharish0% (1)
- Nota Padat Fizik F5 ElectronicDocument21 pagesNota Padat Fizik F5 Electronicslokkro100% (24)
- HAARP InfoDocument7 pagesHAARP InfoThomas BoncioNo ratings yet
- Nandipur 425MW CCPP FF & HVAC System Operation Manual (Volume I Part 6) FDocument67 pagesNandipur 425MW CCPP FF & HVAC System Operation Manual (Volume I Part 6) FHassan FarazNo ratings yet
- InductionHeatingDevices FAG PDFDocument8 pagesInductionHeatingDevices FAG PDFSaad Asim ZafarNo ratings yet
- Up-Crst02 20171030Document11 pagesUp-Crst02 20171030Munawar AliNo ratings yet
- Ansys Icepak BrochureDocument4 pagesAnsys Icepak Brochurejagadees21No ratings yet
- Power Factor Improvement Using Dual Boost Converter: Miss. R. S. More, Prof .D.D.AhireDocument6 pagesPower Factor Improvement Using Dual Boost Converter: Miss. R. S. More, Prof .D.D.Ahiresai charanNo ratings yet
- Automated Toll Gate System Using RFIDDocument5 pagesAutomated Toll Gate System Using RFIDKarthik DmNo ratings yet