You might also like
- Digital LED Thermometer with Microcontroller AVR ATtiny13From EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Rating: 5 out of 5 stars5/5 (1)
- ECU Tester Kit - Build Instructions V2.0Document10 pagesECU Tester Kit - Build Instructions V2.0JonatanNo ratings yet
- Shredder InstructionsDocument13 pagesShredder InstructionsmarcosscaratoNo ratings yet
- Build Your Own Clone Li'l Orange Phaser Kit Instructions: WarrantyDocument26 pagesBuild Your Own Clone Li'l Orange Phaser Kit Instructions: Warrantyuziel gutiNo ratings yet
- RBS GuideDocument9 pagesRBS GuideGabriel PetrutNo ratings yet
- Grandcherokee99 04Document5 pagesGrandcherokee99 04JonNo ratings yet
- Robotics P042-ProcedureDocument6 pagesRobotics P042-ProcedureDebajit Deka 7019No ratings yet
- Flashing The Turnigy 9XDocument29 pagesFlashing The Turnigy 9XCristi BalanNo ratings yet
- Digital Delay Kit Instructions (Bezel Free Version) : If Your Kit Contains An LED Bezel UseDocument13 pagesDigital Delay Kit Instructions (Bezel Free Version) : If Your Kit Contains An LED Bezel UseMike SkillicornNo ratings yet
- Hss MaterialrequirementsDocument10 pagesHss Materialrequirementsybbvvprasada raoNo ratings yet
- Build Your First RobotDocument8 pagesBuild Your First RobotVN ChampionNo ratings yet
- Instrucciones MontajeDocument75 pagesInstrucciones MontajeJosé ToméNo ratings yet
- TVL Ictcssgrade12 q4 Module5Document11 pagesTVL Ictcssgrade12 q4 Module5Marivic Omosura ItongNo ratings yet
- How To Build Arduino ProtoshieldDocument18 pagesHow To Build Arduino ProtoshieldManuelNo ratings yet
- Build Your Own Clone Optical Compressor Kit Instructions: WarrantyDocument21 pagesBuild Your Own Clone Optical Compressor Kit Instructions: WarrantyAlexanderCarpinteroRoca100% (1)
- Overhead ConsoleDocument4 pagesOverhead ConsoleGelatoneNo ratings yet
- Flashing The 9xDocument35 pagesFlashing The 9xhansknorstNo ratings yet
- Installing An Auxiliary Jack in To A 2006 Honda Civic: Taking The Civic Dash ApartDocument12 pagesInstalling An Auxiliary Jack in To A 2006 Honda Civic: Taking The Civic Dash ApartArun FitNo ratings yet
- Civic PDFDocument12 pagesCivic PDFArun FitNo ratings yet
- Attachment: " How To Make Smart Walking Stick For Blind Person"Document8 pagesAttachment: " How To Make Smart Walking Stick For Blind Person"Hima-to PpnsNo ratings yet
- 2010 Toyota Prius Package II Head Unit UpgradeDocument10 pages2010 Toyota Prius Package II Head Unit UpgradeMichael HaisleyNo ratings yet
- Caixa de LançarDocument16 pagesCaixa de LançarLê Trindad TrinNo ratings yet
- Arduino LED Fuel GaugeDocument13 pagesArduino LED Fuel GaugeavalosheNo ratings yet
- Simple Humanoid Walking and Dancing Robot ArduinoDocument12 pagesSimple Humanoid Walking and Dancing Robot ArduinoHamza KhilaNo ratings yet
- Wiring The Toyota Crown 1UZDocument11 pagesWiring The Toyota Crown 1UZLahiru MadusankaNo ratings yet
- Arduino CNC Controller For ESTLCAMDocument10 pagesArduino CNC Controller For ESTLCAMglamuraNo ratings yet
- Breadboarding Basics TCADocument27 pagesBreadboarding Basics TCARost Hariton100% (1)
- 1999 W210 Ipod USB Adapter InstallDocument9 pages1999 W210 Ipod USB Adapter InstallMitrovic AleksandarNo ratings yet
- P182 ManualDocument56 pagesP182 ManualEnzo IonataNo ratings yet
- Build Your Own Arduino For Under 10 - Nathan - Chantrell.netnathanDocument6 pagesBuild Your Own Arduino For Under 10 - Nathan - Chantrell.netnathancareca1984No ratings yet
- Laptop Motherboard ComponentsDocument5 pagesLaptop Motherboard ComponentsvinodNo ratings yet
- How To Make A Nano Mouse 3 0Document12 pagesHow To Make A Nano Mouse 3 0prakash bhagatNo ratings yet
- Computers and ElectronicsDocument17 pagesComputers and ElectronicsIsaac GNo ratings yet
- Smart Robotic Arm Using: Page 1 of 9Document9 pagesSmart Robotic Arm Using: Page 1 of 9Akhilesh KumarNo ratings yet
- 1 1 8 P Solderingpractice Optional FunlightDocument6 pages1 1 8 P Solderingpractice Optional Funlightapi-287488627No ratings yet
- Assembly, Use & Troubleshooting Manual: ESR Meter KitDocument12 pagesAssembly, Use & Troubleshooting Manual: ESR Meter KitUfuk AkgülNo ratings yet
- 8x8x8 LED Cube PART NO. 2168940: Bill of MaterialsDocument13 pages8x8x8 LED Cube PART NO. 2168940: Bill of MaterialsLuis Gutierrez MaganNo ratings yet
- Arduino Motor ShieldDocument3 pagesArduino Motor Shielddigital media technologiesNo ratings yet
- Consolizing An MVS 2 Slot: Parts NeededDocument12 pagesConsolizing An MVS 2 Slot: Parts NeededJames WhalenNo ratings yet
- Arduino Uno CNC ShieldDocument11 pagesArduino Uno CNC ShieldMărian IoanNo ratings yet
- Your-First-Experiments Blink CircuitDocument20 pagesYour-First-Experiments Blink CircuitLandy AdianetNo ratings yet
- Arduino 2WD Smart Robot Car KitDocument6 pagesArduino 2WD Smart Robot Car Kitмаксим соловейNo ratings yet
- BMW ModulesDocument32 pagesBMW ModulesGuler RahimNo ratings yet
- Building A Line Follower RobotDocument17 pagesBuilding A Line Follower RobotSurdeep ChaudharyNo ratings yet
- PBL 1 COMMON EXPERIMENTAL PRACTICE 12 Simple Steps To Make LineDocument18 pagesPBL 1 COMMON EXPERIMENTAL PRACTICE 12 Simple Steps To Make LineNadakudthi UdayNo ratings yet
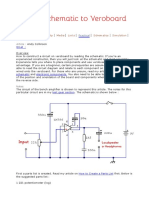
- From Schematic To VeroboardDocument12 pagesFrom Schematic To Veroboardcracker01No ratings yet
- 5 Knobs Comp ByocDocument25 pages5 Knobs Comp ByocRafikGuergourNo ratings yet
- PDR-654/PDR-654T: Owner's ManualDocument17 pagesPDR-654/PDR-654T: Owner's ManualJose Carlos PerezNo ratings yet
- See Through Arduino UNODocument8 pagesSee Through Arduino UNOAntonio Adalto AltomaniNo ratings yet
- VM8013 Owners ManualDocument28 pagesVM8013 Owners ManualAnonymous xIU3Terc1fNo ratings yet
- Passive Cooker Istruzioni enDocument18 pagesPassive Cooker Istruzioni enFabio TavanoNo ratings yet
- B Bod InstructionsDocument25 pagesB Bod Instructionsrash48No ratings yet
- Build Your Own Clone The Swede Kit Instructions: WarrantyDocument28 pagesBuild Your Own Clone The Swede Kit Instructions: WarrantysamhainnNo ratings yet
- Electronics InstructionsDocument17 pagesElectronics InstructionsabarrosoblancoNo ratings yet
- 1 1 8 Ak Solderingpractice Optional FunlightDocument7 pages1 1 8 Ak Solderingpractice Optional Funlightapi-290804719100% (1)
- Build Your Own Clone Parametric EQ Kit Instructions: WarrantyDocument27 pagesBuild Your Own Clone Parametric EQ Kit Instructions: Warrantyjohan ardinNo ratings yet
- Instr Hyundai H Cmd4004 RusDocument85 pagesInstr Hyundai H Cmd4004 RusMosquito MaxiNo ratings yet
- Arduino and the Way of the Ninja (for Absolute Beginners)From EverandArduino and the Way of the Ninja (for Absolute Beginners)Rating: 1 out of 5 stars1/5 (2)
- Arduino: The Ultimate Guide to Arduino for Beginners Including Arduino Basics, Tips & Tricks, Projects, and More!From EverandArduino: The Ultimate Guide to Arduino for Beginners Including Arduino Basics, Tips & Tricks, Projects, and More!No ratings yet
- Digital Communications Lab MannualDocument74 pagesDigital Communications Lab MannualwizardvenkatNo ratings yet
- Ultrasound CleaningDocument19 pagesUltrasound CleaningMohamed RizvanNo ratings yet
- Motion Sensor For Security LightDocument3 pagesMotion Sensor For Security LightMohamed RizvanNo ratings yet
- solar TrackerDocument3 pagessolar TrackerjibinshajigeorgeNo ratings yet
- Cs Lab ManualDocument64 pagesCs Lab ManualMohamed RizvanNo ratings yet
- Intel 8085 Microprocessor KitDocument8 pagesIntel 8085 Microprocessor KitMohamed RizvanNo ratings yet
- Robotics Redefined Barracuda Wifi RC Car ExampleDocument5 pagesRobotics Redefined Barracuda Wifi RC Car ExampleMohamed RizvanNo ratings yet
- Mini Ups SystemDocument2 pagesMini Ups SystemMohamed RizvanNo ratings yet
- IrRemoteErrata-v1 0Document2 pagesIrRemoteErrata-v1 0Mohamed RizvanNo ratings yet
- Gas Leakage AlarmDocument2 pagesGas Leakage AlarmShailesh ShuklaNo ratings yet
- Matlab Lesson 4Document8 pagesMatlab Lesson 4Vijay KrishnaNo ratings yet
- Ge2211 - Environmental Science& EngineeringDocument5 pagesGe2211 - Environmental Science& EngineeringMohamed RizvanNo ratings yet
- Laser Communication SystemDocument3 pagesLaser Communication SystemamitmaheshpurNo ratings yet
- B2 Compton Effect v3Document9 pagesB2 Compton Effect v3Mohamed RizvanNo ratings yet
- Ecosystems and BiodiversityDocument25 pagesEcosystems and BiodiversityRahul67% (3)
- Battery Charger Cum Voltage AnalyserDocument2 pagesBattery Charger Cum Voltage AnalyserMohamed RizvanNo ratings yet
- Automatic Speed ControllerDocument3 pagesAutomatic Speed ControllerMohamed RizvanNo ratings yet
- At89c52 Based RobocarDocument5 pagesAt89c52 Based RobocarAbhishek KulhariNo ratings yet
- GSM - SiemensDocument42 pagesGSM - Siemensapi-3706414100% (3)
- Axon SchematicDocument1 pageAxon SchematicMohamed RizvanNo ratings yet
- Accurate Electronic StopDocument1 pageAccurate Electronic StopMohamed RizvanNo ratings yet
- Introduction To Environmental Studies and Natural ResourcesDocument24 pagesIntroduction To Environmental Studies and Natural ResourcesRahul89% (19)
- A Comparison of Wireless Local Loop Technologies With Reference To Their Application in Rural Areas of PakistanDocument3 pagesA Comparison of Wireless Local Loop Technologies With Reference To Their Application in Rural Areas of PakistanMohamed RizvanNo ratings yet
- Introduction To Environmental Studies and Natural ResourcesDocument24 pagesIntroduction To Environmental Studies and Natural ResourcesRahul89% (19)
- Robotics With The Boe Bot v3.0Document310 pagesRobotics With The Boe Bot v3.0Ivan AbrahamNo ratings yet
- Ultrasound PhysicsDocument26 pagesUltrasound PhysicsAmi Desai50% (2)
- Smart Sensors and Applications: Student GuideDocument340 pagesSmart Sensors and Applications: Student GuideUsiack HewissNo ratings yet
- 3rd Generation Mobile Communication SystemDocument200 pages3rd Generation Mobile Communication Systemapi-2697247667% (3)
- Robotics Redefined Barracuda Wifi RC Car ExampleDocument5 pagesRobotics Redefined Barracuda Wifi RC Car ExampleMohamed RizvanNo ratings yet
- Introduction To Mine SurveyingDocument7 pagesIntroduction To Mine SurveyingJoshua Miguel MejiasNo ratings yet
- The Power of Urine PDFDocument61 pagesThe Power of Urine PDFJohnSmith0488No ratings yet
- Full Download Test Bank For Nursing A Concept Based Approach To Learning Volume II 3rd Edition 3rd Edition PDF Full ChapterDocument36 pagesFull Download Test Bank For Nursing A Concept Based Approach To Learning Volume II 3rd Edition 3rd Edition PDF Full Chaptersignor.truss.j26uk100% (17)
- Tle - H.E.-Cookery: Quarter 2 - Module 2: Prepare Salad DressingDocument26 pagesTle - H.E.-Cookery: Quarter 2 - Module 2: Prepare Salad DressingRodel Camposo88% (25)
- Epoxy Plus Pipeline Repai Grout TG - MSDSDocument5 pagesEpoxy Plus Pipeline Repai Grout TG - MSDSgrimaguilNo ratings yet
- The Solution To Absenteeism: in Grade 7 Student of Abuyog National High SchoolDocument4 pagesThe Solution To Absenteeism: in Grade 7 Student of Abuyog National High SchoolAilen Lagula CervantesNo ratings yet
- LEEDDocument161 pagesLEEDjeruelNo ratings yet
- Aigen Zhao, PHD, Pe, Gse Environmental, LLC, Usa Mark Harris, Gse Environmental, LLC, UsaDocument41 pagesAigen Zhao, PHD, Pe, Gse Environmental, LLC, Usa Mark Harris, Gse Environmental, LLC, UsaCarlos Ttito TorresNo ratings yet
- The Relationship Between Date of Birth and IndividDocument13 pagesThe Relationship Between Date of Birth and IndividAnonymous ktNyZTNo ratings yet
- LOKRING Technical Documentation Submittal Brass enDocument32 pagesLOKRING Technical Documentation Submittal Brass enYamilelcNo ratings yet
- PROD - Section 1 PDFDocument1 pagePROD - Section 1 PDFsupportLSMNo ratings yet
- JeromeDocument2 pagesJeromeNads DecapiaNo ratings yet
- E28716V9 HRMT20024 Assessment2Document16 pagesE28716V9 HRMT20024 Assessment2bitetNo ratings yet
- Start A Quick Budget Start A Budget by MonthDocument13 pagesStart A Quick Budget Start A Budget by MonthMichelle PadillaNo ratings yet
- Mitra SejatiDocument2 pagesMitra Sejatiestu kurniaNo ratings yet
- Annual Report - TakedaDocument50 pagesAnnual Report - TakedaAbdullah221790No ratings yet
- Diesel Generator 350-To-500-Kw-Specs-SheetDocument9 pagesDiesel Generator 350-To-500-Kw-Specs-SheetamrNo ratings yet
- Model CV QLDocument6 pagesModel CV QLMircea GiugleaNo ratings yet
- JETIR1904787Document3 pagesJETIR1904787RONAL SALAS CONTRERASNo ratings yet
- Black and Decker Vaporera Electrica RecetarioDocument17 pagesBlack and Decker Vaporera Electrica RecetarioFabio AtenógenesNo ratings yet
- Exercises: (A) Read The Following PassageDocument2 pagesExercises: (A) Read The Following PassageNur Nezanna0% (1)
- Components of FitnessDocument3 pagesComponents of Fitnessapi-3830277100% (1)
- Passive In-Line Chlorination For Drinking Water DiDocument18 pagesPassive In-Line Chlorination For Drinking Water DitefovNo ratings yet
- Drying Operation: Meika Syahbana RusliDocument69 pagesDrying Operation: Meika Syahbana RusliFrida GinaNo ratings yet
- Presentation On Dysuria 1Document25 pagesPresentation On Dysuria 1ankur acharyaNo ratings yet
- CFM56 3Document148 pagesCFM56 3manmohan100% (1)
- Module-1-ISO 13485-DocumentDocument7 pagesModule-1-ISO 13485-Documentsri manthNo ratings yet
- The Safe Motherhood InitiativeDocument3 pagesThe Safe Motherhood InitiativeAnonymous g6L7jJWNo ratings yet
- Civrev2 2019 Case TitlesDocument3 pagesCivrev2 2019 Case TitlesAnne VallaritNo ratings yet
- Two-Post Lift Model:210C 210CXDocument36 pagesTwo-Post Lift Model:210C 210CXventitapostNo ratings yet