You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Motor Drives BY K .Sunil Kumar Griet-Power ElectronicsDocument4 pagesMotor Drives BY K .Sunil Kumar Griet-Power ElectronicsKalyan KumarNo ratings yet
- DC MachineDocument20 pagesDC MachineTammanurRaviNo ratings yet
- Chapter 10 DC Machine Part 1Document34 pagesChapter 10 DC Machine Part 1Shobanraj LetchumananNo ratings yet
- C 2003 James L. Kirtley JRDocument18 pagesC 2003 James L. Kirtley JRMadina KalmuhambetovaNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- Electric Power SystemDocument9 pagesElectric Power SystemSuterm SeccionNo ratings yet
- DC MotorDrivesDocument24 pagesDC MotorDrivesyohannes getachewNo ratings yet
- The Direct Current (DC) Motor - Principle of OperationDocument5 pagesThe Direct Current (DC) Motor - Principle of OperationEdison EstrellaNo ratings yet
- EE 448 Laboratory Experiment 4 Introduction To DC MotorsDocument10 pagesEE 448 Laboratory Experiment 4 Introduction To DC MotorsjegjegtNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- AEEE 352 Assignment 3Document10 pagesAEEE 352 Assignment 3mchris91No ratings yet
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- Machines Dcmotors 2 April 14Document20 pagesMachines Dcmotors 2 April 14Pola RismaNo ratings yet
- Repulsion MotorDocument10 pagesRepulsion MotorAhmed Abd El MoatiNo ratings yet
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesDocument7 pagesDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitNo ratings yet
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocument12 pagesDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNo ratings yet
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- Objective: Fig 1. Left Hand RuleDocument11 pagesObjective: Fig 1. Left Hand RuleShahir Afif IslamNo ratings yet
- Pilot ExciterDocument6 pagesPilot ExciterRudy HerreraNo ratings yet
- Schneider No165 Control Monitoring Protection HV MotorsDocument28 pagesSchneider No165 Control Monitoring Protection HV Motorstkdrt2166No ratings yet
- Chapter 3 - Actuators-1Document42 pagesChapter 3 - Actuators-1NguyenNo ratings yet
- AC Drives and Soft Starter Application Guide - AllenBradleyCoDocument5 pagesAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNo ratings yet
- Speed Control For Brushless DC MotorsDocument50 pagesSpeed Control For Brushless DC MotorsMiladShahabiNo ratings yet
- Energy Power Conservation in Motor ApplicationsDocument4 pagesEnergy Power Conservation in Motor ApplicationskarthikumarNo ratings yet
- AC Series MotorDocument9 pagesAC Series MotorSal SidotiNo ratings yet
- Abigail EE 330 Assignment 7Document12 pagesAbigail EE 330 Assignment 7Jay EyNo ratings yet
- Power Systems TheoryDocument13 pagesPower Systems TheoryGitta JoshuaNo ratings yet
- MotorDocument62 pagesMotorModesto BasterraNo ratings yet
- Bab 2-DC MOTORDocument35 pagesBab 2-DC MOTORAfieza TumijanNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document5 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Assignment # 7Document14 pagesAssignment # 7Jay EyNo ratings yet
- Industrial Machines IiDocument26 pagesIndustrial Machines IiIsaac KimaruNo ratings yet
- Synchronous Motor ThesisDocument6 pagesSynchronous Motor Thesissandyharwellevansville100% (2)
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Laboratory Session 5 Magnetization Curve of A DC GeneratorDocument7 pagesLaboratory Session 5 Magnetization Curve of A DC GeneratorNatan Bravo GarridoNo ratings yet
- DC MachineDocument33 pagesDC MachineJevon WilsonNo ratings yet
- Task 4: Figure 1 Speed-Torque Curve For Ideal DC MotorDocument19 pagesTask 4: Figure 1 Speed-Torque Curve For Ideal DC MotoraqeelNo ratings yet
- Synchronous Generator TrainerDocument6 pagesSynchronous Generator TrainerBabyNo ratings yet
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- DC Motor BasicsDocument6 pagesDC Motor Basicsdebnathsuman49No ratings yet
- Motor Fundamentals PDFDocument12 pagesMotor Fundamentals PDFrajeshpalla4uNo ratings yet
- Module 3 AC Generators Transformers AC MotorsDocument57 pagesModule 3 AC Generators Transformers AC MotorsEme Elibe Johnson EmestarNo ratings yet
- DcdrivesDocument17 pagesDcdrivesMogaka LucasNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Document22 pagesGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraNo ratings yet
- The Simplified Circle DiagramDocument5 pagesThe Simplified Circle DiagramPradeep RajasekeranNo ratings yet
- 电磁电机-3 直流无刷电机Document37 pages电磁电机-3 直流无刷电机Jiyuan JiaNo ratings yet
- Speed Control of DC MotorsDocument27 pagesSpeed Control of DC MotorsBabuKannanNo ratings yet
- EM - Solutions To Question Bank 2022-23Document53 pagesEM - Solutions To Question Bank 2022-23Kubera U100% (2)
- Implementing Embedded Speed Control For Brushless DC Motors Part1Document8 pagesImplementing Embedded Speed Control For Brushless DC Motors Part1charliesteven100% (2)
- DC MotorDocument8 pagesDC Motorven_avv3382No ratings yet
- ECE 252 Introduction To Electrical Engineering: Lesson 19. MotorsDocument9 pagesECE 252 Introduction To Electrical Engineering: Lesson 19. MotorsPhillip ChirongweNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Front Shock Absorber With Coil Spring: OverhaulDocument28 pagesFront Shock Absorber With Coil Spring: OverhaulMusat Catalin-MarianNo ratings yet
- O&M Quality Dossier 9973604123Document93 pagesO&M Quality Dossier 9973604123Prajay ManeNo ratings yet
- Geeetech I3 Pro W Assembly ManualDocument116 pagesGeeetech I3 Pro W Assembly ManualV00D00100% (1)
- P.C. MS14-MS16 (C852) - EngDocument114 pagesP.C. MS14-MS16 (C852) - EngRicardo Bilbao100% (7)
- K 4700 CSK 5000 CCK 5500 CBK 5000 CSK 6000 CCK 6000 CSK 7500 CCDocument2 pagesK 4700 CSK 5000 CCK 5500 CBK 5000 CSK 6000 CCK 6000 CSK 7500 CCMIGUEL ÁNGEL TOMÉNo ratings yet
- Arm Robot (Scorbot ER-III) : A. IntroductionDocument3 pagesArm Robot (Scorbot ER-III) : A. IntroductionYehezkiel88No ratings yet
- FoamPro 1600 1601 Systems - 1Document11 pagesFoamPro 1600 1601 Systems - 1Simon BertoliNo ratings yet
- Bombas Control HidraulicoDocument2 pagesBombas Control HidraulicoLenin CórdovaNo ratings yet
- rd-m592 2Document1 pagerd-m592 2faizgpNo ratings yet
- Engine MechanicalDocument86 pagesEngine MechanicalLeonardo David Palavecino ParadaNo ratings yet
- QSN14 Series: Diesel Generator SetDocument4 pagesQSN14 Series: Diesel Generator SetHemant KumarNo ratings yet
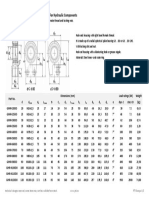
- GIHR-K..DO - Rod Ends For Hydraulic ComponentsDocument1 pageGIHR-K..DO - Rod Ends For Hydraulic ComponentsQuintrae DelfinNo ratings yet
- Imo Pump AceDocument4 pagesImo Pump Acepetrakou aglaia0% (1)
- quadramaticPGEI 5329 PDFDocument67 pagesquadramaticPGEI 5329 PDFFehr RiveraNo ratings yet
- 24 H Hidraulico PDFDocument2 pages24 H Hidraulico PDFRICHARDNo ratings yet
- Precision Products and Solutions: Smoother. Faster. LongerDocument60 pagesPrecision Products and Solutions: Smoother. Faster. LongerVladimir Illich Pinzon BallenNo ratings yet
- Investment Cast Process PumpsDocument8 pagesInvestment Cast Process PumpsJaldhi PatelNo ratings yet
- Terex Backhoe Loader TX760 860 970 980 Workshop ManualDocument6 pagesTerex Backhoe Loader TX760 860 970 980 Workshop ManualJoana100% (1)
- Valmet 611 DSLDocument57 pagesValmet 611 DSLagrodostavaNo ratings yet
- N54 Engine IntroductionDocument15 pagesN54 Engine Introductionryanlourenco100% (1)
- GAM CatalogDocument101 pagesGAM CatalogElectromateNo ratings yet
- Basics of AC Electric Motors and PartsDocument3 pagesBasics of AC Electric Motors and PartsPankaj Kumar SinghNo ratings yet
- Zx225uslc 3Document6 pagesZx225uslc 3Jerrick BinateroNo ratings yet
- Excavadora 336DL CAT Manual de Partes PDFDocument1,179 pagesExcavadora 336DL CAT Manual de Partes PDFJuan Paco100% (7)
- Huafengdongli 495 4100 Series OperationmanualDocument7 pagesHuafengdongli 495 4100 Series Operationmanualdaryl100% (27)
- Bomba Centrifuga B3ZRMSDocument1 pageBomba Centrifuga B3ZRMSricsnikNo ratings yet
- ALUP Largo 31-45 Sales Leaflet EN 6999640400Document2 pagesALUP Largo 31-45 Sales Leaflet EN 6999640400Bosznay ZoltánNo ratings yet
- UK Karting - Tech Talk: Preparation & Jetting of The Rotax Max CarburettorDocument6 pagesUK Karting - Tech Talk: Preparation & Jetting of The Rotax Max Carburettorjohnknight000No ratings yet
- RT600 Tier3&Tier4i Parts-Manual For-Reference-Only April2013Document370 pagesRT600 Tier3&Tier4i Parts-Manual For-Reference-Only April2013Fausto Herrera B100% (6)
- Single Phase Induction Motor - Electrical4uDocument8 pagesSingle Phase Induction Motor - Electrical4uKalai LakshmanNo ratings yet