You might also like
- An 294Document6 pagesAn 294shirtquittersNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- A High Efficiency Boost Converter For TFT-LCD Bias SupplyDocument4 pagesA High Efficiency Boost Converter For TFT-LCD Bias SupplyHamid BoualiNo ratings yet
- Pionner A-6Document30 pagesPionner A-6MirlandojmnNo ratings yet
- Bioelectric Potential Amplfier Design: Senior Design Project P09004Document30 pagesBioelectric Potential Amplfier Design: Senior Design Project P09004Liliana Maria Plata SarmientoNo ratings yet
- Fully Differential CMOS Voltage AmplifierDocument16 pagesFully Differential CMOS Voltage AmplifierAjit Narwal0% (1)
- Lab 1, AmpDocument5 pagesLab 1, AmpDavid KoskiNo ratings yet
- Research Article: A Four Quadrature Signals' Generator With Precise Phase AdjustmentDocument7 pagesResearch Article: A Four Quadrature Signals' Generator With Precise Phase Adjustmentaamir.nedian4139No ratings yet
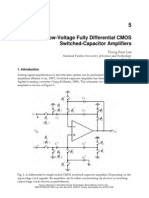
- InTech-Low Voltage Fully Differential Cmos Switched Capacitor AmplifiersDocument14 pagesInTech-Low Voltage Fully Differential Cmos Switched Capacitor Amplifiersanon_385581957No ratings yet
- Designing Amplifiers With Tripath'S High-Power Class-T DriversDocument9 pagesDesigning Amplifiers With Tripath'S High-Power Class-T Driversprasad357No ratings yet
- Sophomore Physics Laboratory Analog Electronics Basic Op-Amp ApplicationsDocument21 pagesSophomore Physics Laboratory Analog Electronics Basic Op-Amp Applicationsamirmohammad888No ratings yet
- Op Amps CircuitsDocument11 pagesOp Amps Circuitslibrian_30005821No ratings yet
- Wein Bridge OscillatorDocument11 pagesWein Bridge OscillatorDimas RioNo ratings yet
- A 45 DB Variable Gain Low Noise MMIC AmplifierDocument4 pagesA 45 DB Variable Gain Low Noise MMIC AmplifierutilitytrackNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 60W Flyback TIDocument16 pages60W Flyback TIe_magazin3821No ratings yet
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Document17 pagesSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiNo ratings yet
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 pagesUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- An IC Operational Transconductance Amplifier (OTA) With Power CapabilityDocument11 pagesAn IC Operational Transconductance Amplifier (OTA) With Power CapabilityhakimshujaNo ratings yet
- The CMOS Gain Boosting TechniqueDocument17 pagesThe CMOS Gain Boosting TechniqueIrvingNo ratings yet
- A 2.5 V High Gain CMOS Differential Input, Differential Output Single Stage AmplifierDocument6 pagesA 2.5 V High Gain CMOS Differential Input, Differential Output Single Stage AmplifierRaghuveerprasad IppiliNo ratings yet
- A High Gain, Fully Differential Single Stage Folded Cascade Op-Amp With 1GHZ BandwidthDocument5 pagesA High Gain, Fully Differential Single Stage Folded Cascade Op-Amp With 1GHZ BandwidthJournal of Telecommunications0% (1)
- Low Power Cmos VgaDocument7 pagesLow Power Cmos VgaMohammad Ayatullah MaktoomNo ratings yet
- 12AX7 6V6 Single Ended Class A Tube Amplifier Design and ConstructionDocument11 pages12AX7 6V6 Single Ended Class A Tube Amplifier Design and ConstructionOz Heat86% (7)
- 01012833, Technical PaperDocument4 pages01012833, Technical Paperindresh.vermaNo ratings yet
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 pagesTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaNo ratings yet
- Understand and Apply The Transimpedance Amplifier Part 1 of 2Document5 pagesUnderstand and Apply The Transimpedance Amplifier Part 1 of 2Bandi Ravi KumarNo ratings yet
- Opamp Linear Device 1300847494 PDFDocument12 pagesOpamp Linear Device 1300847494 PDFNini FarribasNo ratings yet
- A 1 V Low-Noise CMOS Amplifier Using Autozeroing and Chopper Stabilization TechniqueDocument6 pagesA 1 V Low-Noise CMOS Amplifier Using Autozeroing and Chopper Stabilization TechniqueVitaliyGNo ratings yet
- Internal and External Op-Amp Compensation - A Control-Centric TutorialDocument15 pagesInternal and External Op-Amp Compensation - A Control-Centric TutorialengsysNo ratings yet
- Design of CMOS Fully Differential Operational Transconductance AmplifierDocument24 pagesDesign of CMOS Fully Differential Operational Transconductance AmplifierAbhijit Kuvar100% (2)
- ZM 013666670Document5 pagesZM 013666670Alec HunterNo ratings yet
- Snoa 600 ADocument16 pagesSnoa 600 ALoret1086No ratings yet
- AnalogElectronics Th-5Document12 pagesAnalogElectronics Th-5Albert GenceNo ratings yet
- Class D Amplifiers: Fundamentals of Operation and Recent DevelopmentsDocument10 pagesClass D Amplifiers: Fundamentals of Operation and Recent DevelopmentsEssil ElfradiNo ratings yet
- Lab3 - ENGB035Document8 pagesLab3 - ENGB035haneinNo ratings yet
- Basic Feedback Theory: Integrated CircuitsDocument5 pagesBasic Feedback Theory: Integrated CircuitsSourik BharNo ratings yet
- An 311Document6 pagesAn 311ayatullah21No ratings yet
- Closed-Loop Class-D Amplifier With Nonlinear Loop IntegratorsDocument10 pagesClosed-Loop Class-D Amplifier With Nonlinear Loop IntegratorsXiaosen LiuNo ratings yet
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- IC Questions With Ans AnilsirDocument22 pagesIC Questions With Ans AnilsirAniil J Kumaar50% (2)
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDocument7 pagesFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidNo ratings yet
- A Single Stage Flyback Power Supply Unit For LED Lighting ApplicationsDocument5 pagesA Single Stage Flyback Power Supply Unit For LED Lighting ApplicationsPhạm Văn TưởngNo ratings yet
- Additional Experiments Experiment No:1 Operational Amplifier Frequency Response Lab ObjectivesDocument4 pagesAdditional Experiments Experiment No:1 Operational Amplifier Frequency Response Lab ObjectivesDIWAKY52No ratings yet
- Eee 523 ProjDocument12 pagesEee 523 ProjBodhayan PrasadNo ratings yet
- A Wide Tuning Range Voltage-Controlled Ring Oscillator Dedicated To Ultrasound TransmitterDocument4 pagesA Wide Tuning Range Voltage-Controlled Ring Oscillator Dedicated To Ultrasound TransmitterEldhose VargheseNo ratings yet
- UC3842 DesignDocument7 pagesUC3842 DesignCui BapNo ratings yet
- A Slew Rate Controlled Output Driver Using PLL As Compensation CircuitDocument4 pagesA Slew Rate Controlled Output Driver Using PLL As Compensation Circuitsanec032No ratings yet
- Pim Control Method of Multiple Inverters: MaclevDocument6 pagesPim Control Method of Multiple Inverters: Maclevalpe_huandvNo ratings yet
- UC3842 Inside SchematicsDocument17 pagesUC3842 Inside Schematicsp.c100% (1)
- Analog Assignment FinalprintDocument20 pagesAnalog Assignment FinalprintAshish KumarNo ratings yet
- A High Gain Amplifier Using A Cascading Architecture: Iowa State University 348 Durham Center Ames, Iowa 50011, USADocument4 pagesA High Gain Amplifier Using A Cascading Architecture: Iowa State University 348 Durham Center Ames, Iowa 50011, USAKesani Venkat Narsimha ReddyNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- VCO Test Methods: 1. How To Measure Output Power and FrequencyDocument4 pagesVCO Test Methods: 1. How To Measure Output Power and FrequencyDurbha RaviNo ratings yet
- Eca Lab ManualDocument78 pagesEca Lab ManualNageswariah.MNo ratings yet
- Applications of Balanced ModulatorDocument5 pagesApplications of Balanced ModulatorSomeshwar GaddalaNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Learn MATLABDocument61 pagesLearn MATLABsayyanNo ratings yet
- PLLDocument1 pagePLLMohammad Ayatullah MaktoomNo ratings yet
- Small Assignment Small AssignmentDocument1 pageSmall Assignment Small AssignmentNaveen GuptaNo ratings yet
- The IP3 Specification - DemystifiedDocument16 pagesThe IP3 Specification - DemystifiedkuazuNo ratings yet
- Microwave AmplifiersDocument76 pagesMicrowave AmplifiersMohammad Ayatullah MaktoomNo ratings yet
- My Favorite Book ListDocument2 pagesMy Favorite Book ListMohammad Ayatullah MaktoomNo ratings yet
- Phase Locked Loop (PLL) : Study, Modeling & Simulation in MatlabDocument18 pagesPhase Locked Loop (PLL) : Study, Modeling & Simulation in MatlabMohammad Ayatullah MaktoomNo ratings yet
- MTTTran2006 ZhuDocument10 pagesMTTTran2006 ZhuMohammad Ayatullah MaktoomNo ratings yet
- EKV v2.6 Parameter Extraction Tutorial Wladyslaw Grabinski: Geneva Modeling Center MotorolaDocument15 pagesEKV v2.6 Parameter Extraction Tutorial Wladyslaw Grabinski: Geneva Modeling Center MotorolaMohammad Ayatullah MaktoomNo ratings yet
- Low Power Cmos VgaDocument7 pagesLow Power Cmos VgaMohammad Ayatullah MaktoomNo ratings yet
- Mohammad A Maktoomi HW#0: SC SC RDocument5 pagesMohammad A Maktoomi HW#0: SC SC RMohammad Ayatullah MaktoomNo ratings yet
- Auk Iee CdtaDocument5 pagesAuk Iee CdtaMohammad Ayatullah MaktoomNo ratings yet
- Gilbert Voltagemode CurrentmodeDocument19 pagesGilbert Voltagemode CurrentmodeMohammad Ayatullah MaktoomNo ratings yet
- What Is RFDocument3 pagesWhat Is RFMohammad Ayatullah MaktoomNo ratings yet
- What Is RFDocument3 pagesWhat Is RFMohammad Ayatullah MaktoomNo ratings yet
- Auk Iee CdtaDocument5 pagesAuk Iee CdtaMohammad Ayatullah MaktoomNo ratings yet
- Course Description RF Circuit Design-1Document2 pagesCourse Description RF Circuit Design-1Mohammad Ayatullah MaktoomNo ratings yet
- Noise in CircuitsDocument33 pagesNoise in CircuitsMohammad Ayatullah MaktoomNo ratings yet
- BGRDocument30 pagesBGRMohammad Ayatullah MaktoomNo ratings yet
- D 119Document35 pagesD 119Mohammad Ayatullah MaktoomNo ratings yet
- Lab2 Testing TutorialDocument12 pagesLab2 Testing TutorialMohammad Ayatullah MaktoomNo ratings yet
- Cmosedu ModelsDocument4 pagesCmosedu ModelsMohammad Ayatullah MaktoomNo ratings yet
- Digital System Design Using HDLDocument15 pagesDigital System Design Using HDLMohammad Ayatullah MaktoomNo ratings yet
- CRform 2008Document2 pagesCRform 2008Mohammad Ayatullah MaktoomNo ratings yet
- D 119Document35 pagesD 119Mohammad Ayatullah MaktoomNo ratings yet
- Platelet Incubator Service Manual PDFDocument140 pagesPlatelet Incubator Service Manual PDFjaviergmarNo ratings yet
- H81-ODM Spec. Quick Review: Revision Change HistoryDocument5 pagesH81-ODM Spec. Quick Review: Revision Change HistoryricortegaNo ratings yet
- Logix5000 Controllers Commom ProceduresDocument575 pagesLogix5000 Controllers Commom ProceduresJuan Camilo Delgado AguirreNo ratings yet
- 8085 InteruptsDocument13 pages8085 InteruptsAsawari DudwadkarNo ratings yet
- TelePACE User and Reference Manual PDFDocument732 pagesTelePACE User and Reference Manual PDFJuan Luis100% (1)
- Eltek Smps SpecDocument2 pagesEltek Smps SpecJohn100% (2)
- Ltn141at13 001Document30 pagesLtn141at13 001andymustopaNo ratings yet
- ICS Inter Part Computer Guess PaperDocument4 pagesICS Inter Part Computer Guess Paperzahiid munirNo ratings yet
- Hitachi Samsung Tutorial V 41 MergedDocument69 pagesHitachi Samsung Tutorial V 41 MergedΓιάννης ΠαναγόπουλοςNo ratings yet
- Miniature Circuit Breaker - Acti 9 xC60 MCBs - A9N2P10DDocument2 pagesMiniature Circuit Breaker - Acti 9 xC60 MCBs - A9N2P10DHapidz ErwinNo ratings yet
- Dbms Assignment 2Document2 pagesDbms Assignment 2kanishka medankaraNo ratings yet
- CG Lab Exam Viva QuestionsDocument3 pagesCG Lab Exam Viva Questionsvasanthi2014No ratings yet
- WB9CYY HW8 Mods 20240403Document27 pagesWB9CYY HW8 Mods 20240403bcpsr7sc86No ratings yet
- VintageAc 2010 WebDocument32 pagesVintageAc 2010 WebfluidaimaginacionNo ratings yet
- KVL and KCLDocument14 pagesKVL and KCLBulli Koteswararao100% (1)
- Gateway To PsuDocument1 pageGateway To Psuroyal1414No ratings yet
- Simple Electromechanical RelayDocument11 pagesSimple Electromechanical RelayKevin FernandezNo ratings yet
- Electric SkinDocument17 pagesElectric Skinabhisekh mohantyNo ratings yet
- IRADC2020 - E020 0360 E020 0391 E020 03b1TP11 PDFDocument8 pagesIRADC2020 - E020 0360 E020 0391 E020 03b1TP11 PDFsk8globe_01100% (1)
- LCMS-2020 Preparative System: Installation GuideDocument15 pagesLCMS-2020 Preparative System: Installation GuideTarik Ait El HocineNo ratings yet
- PriceList User QSemarangDocument1 pagePriceList User QSemarang78858799No ratings yet
- Quarter 2 L1 Combination CircuitDocument41 pagesQuarter 2 L1 Combination CircuitRyo A. UedaNo ratings yet
- VZ01 - LAB - FactoryTalk View Machine Edition and PanelView Plus - Introductory ROKTechED 2015 PDFDocument126 pagesVZ01 - LAB - FactoryTalk View Machine Edition and PanelView Plus - Introductory ROKTechED 2015 PDFPedroNo ratings yet
- 9.arithmetic Instructions PDFDocument13 pages9.arithmetic Instructions PDFAbhradeepNo ratings yet
- Cryogenic Heat TreatmentDocument3 pagesCryogenic Heat Treatmentsri78770% (1)
- Manual UPS RT 5 10kVA en UsDocument48 pagesManual UPS RT 5 10kVA en UsJesus GarciaNo ratings yet
- Minolta Dimage XGDocument132 pagesMinolta Dimage XGglim18No ratings yet
- Naval Command v3.0Document92 pagesNaval Command v3.0Ugly Panda100% (10)
- Check Ignition SystemDocument33 pagesCheck Ignition SystemZoeAnneFranchezkaMiranda50% (4)
- Componente 5500 PDFDocument604 pagesComponente 5500 PDFDenisa NeagoeNo ratings yet