You might also like
- Modeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of MostDocument10 pagesModeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of Mostseshubabu_999No ratings yet
- Project Report DCSDocument51 pagesProject Report DCSEngr XamirNo ratings yet
- Critical Slip and Characteristics of Induction Motor For Borehole Investigating DevicesDocument4 pagesCritical Slip and Characteristics of Induction Motor For Borehole Investigating DevicesAbdullah BokhariNo ratings yet
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDocument5 pagesDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduNo ratings yet
- Realization of An Asynchronous Six-Phase Induction Motor Drive Test-RigDocument5 pagesRealization of An Asynchronous Six-Phase Induction Motor Drive Test-Rigsathish100% (1)
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 pagesSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்No ratings yet
- PMSM 3Document4 pagesPMSM 3VegembogaNo ratings yet
- User's Manual: D.C. Motor StudyDocument18 pagesUser's Manual: D.C. Motor Studysurendra parlaNo ratings yet
- Three-Phase Induction Motor Dynamic Mathematical ModelDocument3 pagesThree-Phase Induction Motor Dynamic Mathematical Modelsajs201100% (3)
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDocument17 pagesSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaNo ratings yet
- Control System NotesDocument199 pagesControl System NotesCarson R. Dick100% (2)
- Unesco - Eolss Sample Chapters: Fundamentals of Electrical Drive ControlsDocument10 pagesUnesco - Eolss Sample Chapters: Fundamentals of Electrical Drive ControlsMsc MaiaNo ratings yet
- Simulation of D.C. Machines Transient Behaviors: Teaching and ResearchDocument7 pagesSimulation of D.C. Machines Transient Behaviors: Teaching and ResearchJames SilvaNo ratings yet
- User's Manual: D.C. Motor StudyDocument25 pagesUser's Manual: D.C. Motor Studymanoj_varma_1No ratings yet
- Torque Ripple Calculation of The Two-Phase Permanent Magnet Synchronous Motor Supplied by A Triac ConverterDocument10 pagesTorque Ripple Calculation of The Two-Phase Permanent Magnet Synchronous Motor Supplied by A Triac Converterjeeva_ebookNo ratings yet
- Paper Title: Ajay Kumar Gudla and Saikat ChakrabartiDocument5 pagesPaper Title: Ajay Kumar Gudla and Saikat ChakrabartiAshutosh KumarNo ratings yet
- Induction Machines: Torque Speed CharacteristicsDocument22 pagesInduction Machines: Torque Speed CharacteristicsGogioman Myhay100% (1)
- Campeanu Tranzitoriu SincronDocument10 pagesCampeanu Tranzitoriu SincronvalentinmullerNo ratings yet
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- Design of PID CONTROLLERDocument6 pagesDesign of PID CONTROLLERRAJ KUMAR SHIHINo ratings yet
- 87 Kutt Michna PopDocument6 pages87 Kutt Michna PopVally ZazaNo ratings yet
- A Design of The DC Motor Control CircuitDocument9 pagesA Design of The DC Motor Control Circuitnyskyscraper051127No ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- Simulation of Electric Machines and Drive Systems Using Matlab and SimulinkDocument11 pagesSimulation of Electric Machines and Drive Systems Using Matlab and SimulinkmdpkishoreNo ratings yet
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocument10 pagesDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNo ratings yet
- 2010 - State Space Controller For Bidirectional DC-DC Converter Buck Mode - OcilkaDocument3 pages2010 - State Space Controller For Bidirectional DC-DC Converter Buck Mode - OcilkaWGSNo ratings yet
- 10 - Overvoltage Calculation by Monte Carlo Method With Accurate Substation Components Modeling PDFDocument5 pages10 - Overvoltage Calculation by Monte Carlo Method With Accurate Substation Components Modeling PDFAnonymous IjLgxu9fXPNo ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- 190-196 AlqassarDocument7 pages190-196 AlqassarSumartono SaribNo ratings yet
- AEE 68 1 2019 - Art - 8Document14 pagesAEE 68 1 2019 - Art - 8Ali ErNo ratings yet
- Permanent Magnet Synchronous Machine PSIMDocument4 pagesPermanent Magnet Synchronous Machine PSIMJulian De MarcosNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- Transfer Function of DC MotorDocument16 pagesTransfer Function of DC Motorlaabi340% (5)
- Mca 01 00066Document7 pagesMca 01 00066djkeags24No ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- Tugas DPSP - Respon Step Motor DCDocument4 pagesTugas DPSP - Respon Step Motor DCMuhammad Afghan FadillahNo ratings yet
- Implementation and Analysis of Microcontroller Based Soft Starters For Three Phase Induction MotorsDocument7 pagesImplementation and Analysis of Microcontroller Based Soft Starters For Three Phase Induction MotorsMega Firdausi NuzullaNo ratings yet
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDocument14 pagesReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationChengyu NiuNo ratings yet
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocument6 pagesMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNo ratings yet
- 04 15761-IJEEE pp135-142Document9 pages04 15761-IJEEE pp135-142Sohira QaziNo ratings yet
- SSRN Id2772630 Tjeuuhgyfguh7776445Document6 pagesSSRN Id2772630 Tjeuuhgyfguh7776445Mustapha AbdullahiNo ratings yet
- G Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDocument4 pagesG Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDante GuajardoNo ratings yet
- A DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationDocument6 pagesA DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationAlex VincentNo ratings yet
- BLDC Under Load PDFDocument9 pagesBLDC Under Load PDFAhmed ShoeebNo ratings yet
- Modelling and Simulation of A DC Motor DriveDocument12 pagesModelling and Simulation of A DC Motor DriveMi HoangNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- He Speed Control of The Induction Motors by The Change of Suply VoltageDocument4 pagesHe Speed Control of The Induction Motors by The Change of Suply VoltagePradeep RajasekeranNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiNo ratings yet
- Upec 2Document7 pagesUpec 2manjusingNo ratings yet
- Antenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringDocument25 pagesAntenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringKenneth CastroNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- HLP-A100 Operating Manual PDFDocument207 pagesHLP-A100 Operating Manual PDFGuillermo HernándezNo ratings yet
- SUN2000 - (100KTL, 110KTL, 115KTL) - M2 User ManualDocument147 pagesSUN2000 - (100KTL, 110KTL, 115KTL) - M2 User ManualEisac SagimanNo ratings yet
- Accusine Catalogue PDFDocument28 pagesAccusine Catalogue PDFKDANo ratings yet
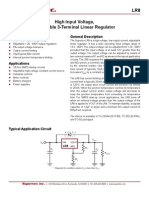
- Supertex Inc.: LR8 High Input Voltage, Adjustable 3-Terminal Linear RegulatorDocument10 pagesSupertex Inc.: LR8 High Input Voltage, Adjustable 3-Terminal Linear RegulatorristrettoNo ratings yet
- Alpha Meter User ManualDocument27 pagesAlpha Meter User Manualpatel chandramaniNo ratings yet
- Manual Airmaster m3 Ap Many0001a00-1Document20 pagesManual Airmaster m3 Ap Many0001a00-1Yobany Cuesta100% (1)
- Operating Manual: Uninterruptible Power SupplyDocument56 pagesOperating Manual: Uninterruptible Power SupplyalstomNo ratings yet
- Catalogue February 2023Document32 pagesCatalogue February 2023Anna KrichunNo ratings yet
- E Series Catalogue & White Paper N00-803-03Document44 pagesE Series Catalogue & White Paper N00-803-03Fabio Moncada Montoya100% (1)
- Lab 8 Battery Charging DischargingDocument7 pagesLab 8 Battery Charging DischargingshuehdihdueozbeNo ratings yet
- Modeling Magnetic Devices Using SPICE Application To Variable InductorsDocument8 pagesModeling Magnetic Devices Using SPICE Application To Variable InductorsRahul BishtNo ratings yet
- 2020 Park Optimization-of-LCL 08753547Document17 pages2020 Park Optimization-of-LCL 08753547adnantanNo ratings yet
- 78eff6 PDFDocument2 pages78eff6 PDFTito NuñezNo ratings yet
- 2) Electromotive Force (Emf)Document2 pages2) Electromotive Force (Emf)ZIdanNo ratings yet
- SAS Network IIDocument64 pagesSAS Network IIdean_lockeyNo ratings yet
- ECE313 Quiz 1 Ece 3 FDocument2 pagesECE313 Quiz 1 Ece 3 FIdris Jeffrey MangueraNo ratings yet
- Capacitor Test Neet 30 Ques FinalDocument6 pagesCapacitor Test Neet 30 Ques Finaldeejam123No ratings yet
- Admag SeDocument12 pagesAdmag SeJose Abel Trejo CaballeroNo ratings yet
- Logic Gates SAMDocument15 pagesLogic Gates SAMSatyam TripathiNo ratings yet
- SG3125 - 3400HV MV 20 SEN Ver14 201906Document141 pagesSG3125 - 3400HV MV 20 SEN Ver14 201906freeware freeNo ratings yet
- Wobbe Index Analyser: For Fast Analysis of Wobbe Index and Air DemandDocument71 pagesWobbe Index Analyser: For Fast Analysis of Wobbe Index and Air DemandZaki nouiNo ratings yet
- CBE140L2Z PRD 001Document3 pagesCBE140L2Z PRD 001Edwin QuinteroNo ratings yet
- Thermoelectric Based Incubator Progress Report: Group Name:-Twisted WiresDocument9 pagesThermoelectric Based Incubator Progress Report: Group Name:-Twisted WiresAditya SahareNo ratings yet
- 300 RM 31.5 Ka 1sec SpecificationDocument4 pages300 RM 31.5 Ka 1sec SpecificationAbdullah Al AsikNo ratings yet
- Week 2 - Lecture 4 - Analog ElectronicsDocument24 pagesWeek 2 - Lecture 4 - Analog ElectronicsMoney BoneyNo ratings yet
- Test Report For Protection Relay and Current Transformer: Schneider Vamp 50Document2 pagesTest Report For Protection Relay and Current Transformer: Schneider Vamp 50RamaNo ratings yet
- Buck Converter Control For Lead Acid Battery ChargDocument9 pagesBuck Converter Control For Lead Acid Battery ChargS KhatibNo ratings yet
- Ats22 User Manual en Bbv51330 04Document85 pagesAts22 User Manual en Bbv51330 04Luis RolaNo ratings yet
- PS II Before T1Document77 pagesPS II Before T1venkat rajNo ratings yet
- Use of SCADA Systems in Power System AutomationDocument10 pagesUse of SCADA Systems in Power System AutomationKamlesh KumarNo ratings yet