You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Piston Engine FundamentalDocument62 pagesPiston Engine Fundamentalkp subedi100% (1)
- Component Locator: Engine Covers and Component Assemblies (1 of 2)Document24 pagesComponent Locator: Engine Covers and Component Assemblies (1 of 2)Wilmer HuangaNo ratings yet
- 50 555 Timer CircuitsDocument57 pages50 555 Timer Circuitsshahbaz_809No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Wabco Automated Manual Transmission (AMT) : Aftermarket Solutions For Gearbox Control Units For Volvo ApplicationsDocument9 pagesWabco Automated Manual Transmission (AMT) : Aftermarket Solutions For Gearbox Control Units For Volvo ApplicationsDieselk0% (1)
- Ecm (Engine Control Module) MR 140Document22 pagesEcm (Engine Control Module) MR 140jorge luis guevara martinezNo ratings yet
- 6-Speed Synchromesh Transmission For Small Trucks: ZF-Ecolite (Truck)Document2 pages6-Speed Synchromesh Transmission For Small Trucks: ZF-Ecolite (Truck)Mariano Cal GarciaNo ratings yet
- Automation in ManufacturingDocument101 pagesAutomation in ManufacturingPrasanna JNo ratings yet
- WMF PRESTO-1400-Service-Manual2 PDFDocument40 pagesWMF PRESTO-1400-Service-Manual2 PDFOlimpiu EnacheNo ratings yet
- IADC Classification Chart ExplainedDocument2 pagesIADC Classification Chart ExplainedNacer MezghicheNo ratings yet
- Daihatsu Type K3 Engine Service Manual No.9737 No.9332 No. 9237 Emission Control System PDFDocument11 pagesDaihatsu Type K3 Engine Service Manual No.9737 No.9332 No. 9237 Emission Control System PDFMozes SimataaNo ratings yet
- Conveyor Belt Maintenance & Trouble Shooting ManualDocument48 pagesConveyor Belt Maintenance & Trouble Shooting ManualMichael D. Torres100% (1)
- Series 16VM ControlsDocument2 pagesSeries 16VM ControlsNacer MezghicheNo ratings yet
- vm-2120 Er Cb1eDocument4 pagesvm-2120 Er Cb1eNacer MezghicheNo ratings yet
- GnatusDocument36 pagesGnatusNacer Mezghiche100% (1)
- Safex - c2 - SchemaDocument1 pageSafex - c2 - SchemaNacer MezghicheNo ratings yet
- VM 2120Document60 pagesVM 2120Nacer MezghicheNo ratings yet
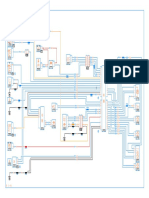
- F4P770, F4P771, F4P772, F5R700, F9q752/caregDocument1 pageF4P770, F4P771, F4P772, F5R700, F9q752/caregNacer MezghicheNo ratings yet
- PWM Speed Controller For Minidrill: 13 Dis 10 RST VCCDocument1 pagePWM Speed Controller For Minidrill: 13 Dis 10 RST VCCNacer Mezghiche100% (1)
- BRC 45 45 C ManualDocument6 pagesBRC 45 45 C ManualNacer MezghicheNo ratings yet
- Dossier BATERIES enDocument14 pagesDossier BATERIES enNacer Mezghiche100% (1)
- F5R700, K4m710/ess/careg/pbchDocument1 pageF5R700, K4m710/ess/careg/pbchNacer MezghicheNo ratings yet
- NTC Thermistors Technical Reference GuideDocument18 pagesNTC Thermistors Technical Reference GuideEdwin Alfredo Lopez AguirreNo ratings yet
- P 912 ADocument13 pagesP 912 ANacer MezghicheNo ratings yet
- 01Document8 pages01Nacer MezghicheNo ratings yet
- S112 PDFDocument1 pageS112 PDFNacer MezghicheNo ratings yet
- Toshiba 32av933n Ver. 1.00 150Document55 pagesToshiba 32av933n Ver. 1.00 150matwan29No ratings yet
- Infineon BTS6143D DS v01 00 enDocument18 pagesInfineon BTS6143D DS v01 00 enNacer MezghicheNo ratings yet
- 002Document1 page002Nacer MezghicheNo ratings yet
- USB Programátor Pro Atmel: +5V Vccint 1k 1k +5V +5V JP2 R2 R3Document1 pageUSB Programátor Pro Atmel: +5V Vccint 1k 1k +5V +5V JP2 R2 R3Nacer Mezghiche100% (1)
- Specification For ApprovalDocument6 pagesSpecification For ApprovalNacer MezghicheNo ratings yet
- 001Document2 pages001Nacer Mezghiche50% (4)
- Venas vm2120Document50 pagesVenas vm2120Nacer MezghicheNo ratings yet
- P 912 ADocument13 pagesP 912 ANacer MezghicheNo ratings yet
- P 912 ADocument13 pagesP 912 ANacer MezghicheNo ratings yet
- NTC Thermistors Technical Reference GuideDocument18 pagesNTC Thermistors Technical Reference GuideEdwin Alfredo Lopez AguirreNo ratings yet
- Beckman Coulter Immage - Maintenance LogbookDocument4 pagesBeckman Coulter Immage - Maintenance LogbookNacer MezghicheNo ratings yet
- TCA965Document17 pagesTCA965Nacer MezghicheNo ratings yet
- Blank Paper HouseDocument1 pageBlank Paper HousedadinotractoNo ratings yet
- O129647v - Mil BB500DXDocument64 pagesO129647v - Mil BB500DXNacer MezghicheNo ratings yet
- Model m25 Free Fall Service ManualDocument44 pagesModel m25 Free Fall Service ManualManuel Rodriguez100% (1)
- Legacy RG - Checklist NormalDocument7 pagesLegacy RG - Checklist NormalJLNo ratings yet
- Xerox DocuColor 2006 - SparePartsListDocument7 pagesXerox DocuColor 2006 - SparePartsListJonathan LongNo ratings yet
- Ohio Magnetics - Scap Handling Magnets Tech Info - WebDocument4 pagesOhio Magnetics - Scap Handling Magnets Tech Info - WebLouis ArringtonNo ratings yet
- Dre80m4 PDFDocument2 pagesDre80m4 PDFRamiro Sew EurodriveNo ratings yet
- Parallel Operation of Synchronous GeneratorDocument7 pagesParallel Operation of Synchronous Generatorfahrid mudoriNo ratings yet
- Agg Power ProfileDocument16 pagesAgg Power ProfileHENRYNo ratings yet
- Polyphase AC Circuits ExplainedDocument36 pagesPolyphase AC Circuits ExplainedSrinivas KrishnaNo ratings yet
- Trane Engineers Newsletter - Mar2021Document8 pagesTrane Engineers Newsletter - Mar2021Raheem_kaNo ratings yet
- Commande HamiltonDocument5 pagesCommande HamiltonclaudemirNo ratings yet
- Mass Storage and Case StudyDocument56 pagesMass Storage and Case StudyRitish GowdaNo ratings yet
- IR 2945 PartsListDocument2 pagesIR 2945 PartsListezeizabarrenaNo ratings yet
- Connector: - 700 Amp Continuous CurrentDocument2 pagesConnector: - 700 Amp Continuous CurrentAnonymous lfw4mfCmNo ratings yet
- MS v00 MPC2030 MPC2050 MPC2530 MPC2550 PDFDocument1,169 pagesMS v00 MPC2030 MPC2050 MPC2530 MPC2550 PDFEdmundo SanchezNo ratings yet
- Haier 42ep25bat 42hp25bat PlasmaDocument46 pagesHaier 42ep25bat 42hp25bat PlasmaDoru RazvanNo ratings yet
- NCP1010, NCP1011, NCP1012, NCP1013, NCP1014 Self-Supplied Monolithic Switcher For Low Standby-Power Offline SMPSDocument23 pagesNCP1010, NCP1011, NCP1012, NCP1013, NCP1014 Self-Supplied Monolithic Switcher For Low Standby-Power Offline SMPSrehanNo ratings yet
- FBF FBF: North America North AmericaDocument2 pagesFBF FBF: North America North AmericaGopal HegdeNo ratings yet
- MFJ-929 Manual enDocument48 pagesMFJ-929 Manual enKarlson2009No ratings yet
- Xiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30Document1 pageXiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30JGSoftNo ratings yet
- Z94-4C Nail Making Machine Specs & Accessories ListingDocument2 pagesZ94-4C Nail Making Machine Specs & Accessories ListingAbayNo ratings yet
- Aspire l3600 ManualDocument87 pagesAspire l3600 ManualYishaq ElNo ratings yet