You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- AC TO AC Write UpsDocument7 pagesAC TO AC Write UpsTin PelingonNo ratings yet
- Energy Manipulation and MeditationDocument6 pagesEnergy Manipulation and Meditationapi-246292178100% (1)
- How Electric Cars Work: A Guide to EV TechnologyDocument4 pagesHow Electric Cars Work: A Guide to EV TechnologyCarla LoiaconoNo ratings yet
- Ccu Sem (2010-05-05) PDFDocument181 pagesCcu Sem (2010-05-05) PDFBích Đỗ DanhNo ratings yet
- Zseise 40 ADocument23 pagesZseise 40 ANini FarribasNo ratings yet
- 2ND YEAR PHYSICS Full Book Topical MCQS With ANSWERSDocument47 pages2ND YEAR PHYSICS Full Book Topical MCQS With ANSWERSArhamNo ratings yet
- Pneumatic Slotting MachineDocument3 pagesPneumatic Slotting MachineSwami NathanNo ratings yet
- Fire Pump Installation GuideDocument3 pagesFire Pump Installation GuideJeff D. AgustinNo ratings yet
- Final Directory Handbook For ADIPEC 2023Document54 pagesFinal Directory Handbook For ADIPEC 2023Zharif ZainiNo ratings yet
- EE 004A DC and AC Machinery ExperimentDocument9 pagesEE 004A DC and AC Machinery ExperimentJerome NuevoNo ratings yet
- Seller'S Disclosure and Condition of Property Addendum (Residential)Document8 pagesSeller'S Disclosure and Condition of Property Addendum (Residential)Barbara BishopNo ratings yet
- MT Lab Final RecordDocument85 pagesMT Lab Final RecordPRABATH MADHAVANNo ratings yet
- FMC1278Document132 pagesFMC1278Herick Douglas PereiraNo ratings yet
- Deepwater Training Seminar Presented ToDocument36 pagesDeepwater Training Seminar Presented ToSergio Jesus MarquezNo ratings yet
- 1Document26 pages1Maribel Bihag AlcantaraNo ratings yet
- GROUP 1 - PetE 3306 - Final Requirement in Engineering EconomicsDocument12 pagesGROUP 1 - PetE 3306 - Final Requirement in Engineering Economicskevin alidoNo ratings yet
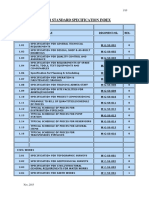
- Water Standard Specification Index As On Dec 2015Document10 pagesWater Standard Specification Index As On Dec 2015afp15060% (1)
- National Science Olympiad: SyllabusDocument4 pagesNational Science Olympiad: SyllabusawaninderNo ratings yet
- محطات الطاقةDocument22 pagesمحطات الطاقةJoe LewisNo ratings yet
- Pressure MeasurementDocument19 pagesPressure MeasurementShadmanSakiefHridoyNo ratings yet
- Brakes & Clutches: Formulas and Applications for Friction DevicesDocument16 pagesBrakes & Clutches: Formulas and Applications for Friction DevicesNeil RubsNo ratings yet
- Motor (ABB Type)Document50 pagesMotor (ABB Type)Rolando Nunez del Prado B.No ratings yet
- Germany and Japan's Remarkable Post-WWII Economic ComebackDocument5 pagesGermany and Japan's Remarkable Post-WWII Economic ComebackHANNALEENo ratings yet
- Mechanical OperationDocument14 pagesMechanical OperationThiyaga RajanNo ratings yet
- Solar Refrigerator SpecsDocument4 pagesSolar Refrigerator SpecsFaisal Bin FaheemNo ratings yet
- EnergySRP Forms MatchingDocument2 pagesEnergySRP Forms Matchingeiad-mahmoudNo ratings yet
- APC Back-Ups 350Document2 pagesAPC Back-Ups 350Justin EndacottNo ratings yet
- Chapter 2 Structure of AtomsDocument16 pagesChapter 2 Structure of AtomsCherry T CYNo ratings yet
- MCQ 140Document14 pagesMCQ 140Aawez AkhterNo ratings yet