You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Piping Handbook - Hydrocarbon Processing - 1968Document140 pagesPiping Handbook - Hydrocarbon Processing - 1968VS271294% (16)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- UH-60A Blackhawk Eng. Simulation Program, Vol. 1, Math ModelDocument361 pagesUH-60A Blackhawk Eng. Simulation Program, Vol. 1, Math Modelmanitheaerialfighter100% (1)
- BPSK SimulinkDocument13 pagesBPSK SimulinkpootommyNo ratings yet
- Estimation Software For Presure VesselDocument36 pagesEstimation Software For Presure VesselKarthikeyan Shanmugavel0% (1)
- High Integrity Aluminum (GENERAL)Document140 pagesHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- Bazele Matematice Ale Calculatoarelor - Florian Mircea BoianDocument132 pagesBazele Matematice Ale Calculatoarelor - Florian Mircea BoiannimsocNo ratings yet
- Asa01 Lecture PDFDocument70 pagesAsa01 Lecture PDFLester IngberNo ratings yet
- Asa01 Lecture PDFDocument70 pagesAsa01 Lecture PDFLester IngberNo ratings yet
- Smni01 Lecture PDFDocument70 pagesSmni01 Lecture PDFLester IngberNo ratings yet
- Statistical Mechanics of Neocortical Interactions: High Resolution Path-Integral Calculation of Short-Term MemoryDocument35 pagesStatistical Mechanics of Neocortical Interactions: High Resolution Path-Integral Calculation of Short-Term MemoryLester IngberNo ratings yet
- Smni99 G Factor PDFDocument11 pagesSmni99 G Factor PDFLester IngberNo ratings yet
- Path-Integral Evolution of Multivariate Systems With Moderate NoiseDocument15 pagesPath-Integral Evolution of Multivariate Systems With Moderate NoiseLester IngberNo ratings yet
- Statistical Mechanics of Financial Markets (SMFM) : $id: Markets - Lecture, V 1.15 1999/04/17 12:52:45 Ingber Exp Ingber $Document74 pagesStatistical Mechanics of Financial Markets (SMFM) : $id: Markets - Lecture, V 1.15 1999/04/17 12:52:45 Ingber Exp Ingber $Lester IngberNo ratings yet
- Multiple Scales of Brain-Mind InteractionsDocument5 pagesMultiple Scales of Brain-Mind InteractionsLester IngberNo ratings yet
- Statistical Mechanics of Multiple Scales of Neocortical InteractionsDocument78 pagesStatistical Mechanics of Multiple Scales of Neocortical InteractionsLester IngberNo ratings yet
- Smni81 Attention PDFDocument11 pagesSmni81 Attention PDFLester IngberNo ratings yet
- Statistical Mechanics of Neocortical Interactions. Derivation of Short-Term-Memory CapacityDocument22 pagesStatistical Mechanics of Neocortical Interactions. Derivation of Short-Term-Memory CapacityLester IngberNo ratings yet
- Lester Ingber Research, P.O. Box 857, Mclean, Virginia 22101Document11 pagesLester Ingber Research, P.O. Box 857, Mclean, Virginia 22101Lester IngberNo ratings yet
- Smni96 Nonlinear PDFDocument9 pagesSmni96 Nonlinear PDFLester IngberNo ratings yet
- Smni83 Dynamics PDFDocument32 pagesSmni83 Dynamics PDFLester IngberNo ratings yet
- Influence of Macrocolumnar EEG On Ca Waves: Lester IngberDocument4 pagesInfluence of Macrocolumnar EEG On Ca Waves: Lester IngberLester IngberNo ratings yet
- Smni11 STM Scales PDFDocument29 pagesSmni11 STM Scales PDFLester IngberNo ratings yet
- Neocortical Dynamics at Multiple Scales: EEG Standing Wav Es, Statistical Mechanics, and Physical AnalogsDocument25 pagesNeocortical Dynamics at Multiple Scales: EEG Standing Wav Es, Statistical Mechanics, and Physical AnalogsLester IngberNo ratings yet
- Electroencephalographic Field Influence On Calcium Momentum WavesDocument16 pagesElectroencephalographic Field Influence On Calcium Momentum WavesLester IngberNo ratings yet
- Statistical Mechanics of Neocortical Interactions: Time DelaysDocument5 pagesStatistical Mechanics of Neocortical Interactions: Time DelaysLester IngberNo ratings yet
- Statistical Mechanics of Neocortical Interactions. EEG Dispersion RelationsDocument14 pagesStatistical Mechanics of Neocortical Interactions. EEG Dispersion RelationsLester IngberNo ratings yet
- Markets91 Interest PDFDocument25 pagesMarkets91 Interest PDFLester IngberNo ratings yet
- Smni06 Ppi PDFDocument21 pagesSmni06 Ppi PDFLester IngberNo ratings yet
- Statistical Mechanics of Neocortical Interactions: High Resolution Path-Integral Calculation of Short-Term MemoryDocument35 pagesStatistical Mechanics of Neocortical Interactions: High Resolution Path-Integral Calculation of Short-Term MemoryLester IngberNo ratings yet
- Ideas by Statistical Mechanics (ISM) : Lester IngberDocument25 pagesIdeas by Statistical Mechanics (ISM) : Lester IngberLester IngberNo ratings yet
- Smni00 Eeg RT PDFDocument8 pagesSmni00 Eeg RT PDFLester IngberNo ratings yet
- Path-Integral Evolution of Chaos Embedded in Noise: Duffing Neocortical AnalogDocument23 pagesPath-Integral Evolution of Chaos Embedded in Noise: Duffing Neocortical AnalogLester IngberNo ratings yet
- Sewerage & Sewage Treatment PlantDocument26 pagesSewerage & Sewage Treatment PlantSyed ZamanNo ratings yet
- AI in RobotsDocument75 pagesAI in RobotsIslam SehsahNo ratings yet
- Kathir CollegeDocument3 pagesKathir Collegeshanjuneo17No ratings yet
- Creating REST API Using NodeJS and Consuming in AngularJSDocument8 pagesCreating REST API Using NodeJS and Consuming in AngularJSserignemodouNo ratings yet
- SdccmanDocument126 pagesSdccmanGustavo A. Sarache MillanNo ratings yet
- Le22a1321 AocDocument130 pagesLe22a1321 AocEchefisEchefisNo ratings yet
- Experiment 5 DACDocument3 pagesExperiment 5 DACABHISHEK SHARMANo ratings yet
- IBM System Storage DS8000 - A QuickDocument10 pagesIBM System Storage DS8000 - A Quickmuruggan_aNo ratings yet
- Zaroulas Mies Fullpaper 2020 05 21Document9 pagesZaroulas Mies Fullpaper 2020 05 21sidgonzoNo ratings yet
- TDS Sadechaf UVACRYL 2151 - v9Document5 pagesTDS Sadechaf UVACRYL 2151 - v9Alex MacabuNo ratings yet
- Capstone Documentation RevisedDocument5 pagesCapstone Documentation RevisedMary Joy BolinaNo ratings yet
- FL-02-01 PM SheetDocument12 pagesFL-02-01 PM SheetBikas SahaNo ratings yet
- Paket TrainingDocument20 pagesPaket TrainingLukman AriyantoNo ratings yet
- Solar Module CellDocument4 pagesSolar Module CellVinod BabhaleNo ratings yet
- 8th ICCIT - 2005 - 564Document5 pages8th ICCIT - 2005 - 564Amit BiswasNo ratings yet
- Project AgreementDocument6 pagesProject AgreementRowin DizonNo ratings yet
- Colchicine - British Pharmacopoeia 2016Document4 pagesColchicine - British Pharmacopoeia 2016Social Service (V)100% (1)
- Advanced Cooling System - EMD00253ENDocument4 pagesAdvanced Cooling System - EMD00253ENnarayanan_anoob0% (1)
- Softening Point of AsphaltDocument2 pagesSoftening Point of AsphaltMuhammad Rizal RamliNo ratings yet
- Ultra Petronne Interior Supply Corp.: Manufacturer of Light Metal FramesDocument1 pageUltra Petronne Interior Supply Corp.: Manufacturer of Light Metal Framesjun vincint geleraNo ratings yet
- Materials Today: Proceedings: Avula Suresh, T. Nancharaiah, Ravikumar Dumpala, B. Ratna SunilDocument5 pagesMaterials Today: Proceedings: Avula Suresh, T. Nancharaiah, Ravikumar Dumpala, B. Ratna SunilBart MaxNo ratings yet
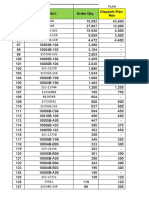
- Order Qty Vs Dispatch Plan - 04 11 20Document13 pagesOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPNo ratings yet
- Jamesbury Polymer and Elastomer Selection GuideDocument20 pagesJamesbury Polymer and Elastomer Selection Guidesheldon1jay100% (1)
- Stock # Carbon Weight Burn Temp Puncture StrengthDocument8 pagesStock # Carbon Weight Burn Temp Puncture StrengthMintNo ratings yet