You might also like
- MRP LVSGR 15 Dec 08Document56 pagesMRP LVSGR 15 Dec 08kodandaramNo ratings yet
- Fundamental PLC TRG ScheduleDocument8 pagesFundamental PLC TRG SchedulekodandaramNo ratings yet
- PLC Fundamental TheoryDocument97 pagesPLC Fundamental Theorykodandaram100% (2)
- Siemens - Motor SpecificationsDocument50 pagesSiemens - Motor SpecificationsArtifoxNo ratings yet
- Microprocessor Based Overload Relay 3RB12Document11 pagesMicroprocessor Based Overload Relay 3RB12kodandaramNo ratings yet
- Motor StandardsDocument17 pagesMotor Standardskodandaram100% (4)
- Motor StandardsDocument17 pagesMotor Standardskodandaram100% (4)
- Motor Maintenance FoliosDocument16 pagesMotor Maintenance Folioskodandaram100% (1)
- Ac DriveDocument32 pagesAc DrivedenramrNo ratings yet
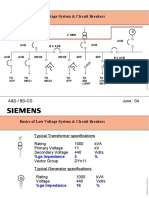
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Document17 pagesBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Contactor BasicsDocument22 pagesContactor Basicskodandaram100% (4)
- Basics of AC Drives 3Document28 pagesBasics of AC Drives 3kodandaramNo ratings yet
- Siemens AC Motors BOOKDocument39 pagesSiemens AC Motors BOOKPedada AdityaNo ratings yet
- Microprocessor Based Overload Relay 3RB12Document11 pagesMicroprocessor Based Overload Relay 3RB12kodandaramNo ratings yet
- Handbook of AC Servo SystemsDocument42 pagesHandbook of AC Servo Systemskodandaram100% (1)
- Basics of AC Drives 2Document20 pagesBasics of AC Drives 2kodandaramNo ratings yet
- Decentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniquesDocument6 pagesDecentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniqueskodandaramNo ratings yet
- Magnetic Fluid and Nanoparticle Applications To NanotechnologyDocument6 pagesMagnetic Fluid and Nanoparticle Applications To NanotechnologykodandaramNo ratings yet
- Baba ResumeDocument2 pagesBaba ResumekodandaramNo ratings yet
- Load-Frequency Regulation Under0-06Document9 pagesLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Application of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemDocument4 pagesApplication of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemkodandaramNo ratings yet
- Ge - 06Document1 pageGe - 06kodandaramNo ratings yet
- Analysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementsDocument7 pagesAnalysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementskodandaramNo ratings yet
- Acd 1Document36 pagesAcd 1lvb123No ratings yet
- Teaching Load Frequency Control Using Matlab and SimulinkDocument38 pagesTeaching Load Frequency Control Using Matlab and SimulinkkodandaramNo ratings yet
- Gordon Woodward: City of Coventry Single and Two Phase Generation and DistributionDocument4 pagesGordon Woodward: City of Coventry Single and Two Phase Generation and DistributionkodandaramNo ratings yet
- The Prospects of Nanotechnology in Electrical Power Engineering PDFDocument4 pagesThe Prospects of Nanotechnology in Electrical Power Engineering PDFMohamed Abdel Aziz DarwishNo ratings yet
- Resume (Core)Document3 pagesResume (Core)kodandaramNo ratings yet
- Kothariapp2000 06Document6 pagesKothariapp2000 06kodandaramNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hawker 4000 Electrical Systems TrainingDocument38 pagesHawker 4000 Electrical Systems TrainingLeonardoAzevedo100% (2)
- IO Mod DC InputDocument2 pagesIO Mod DC InputAdérito AguiarNo ratings yet
- 6MF28520AA00 Datasheet enDocument3 pages6MF28520AA00 Datasheet enIvan JeremicNo ratings yet
- Vending Machine ReportDocument11 pagesVending Machine ReportAshfaq AliNo ratings yet
- Ts Boost ConverterDocument6 pagesTs Boost Converterala houamNo ratings yet
- -شرح كابل الاى ون بالتفصيل (E1) - e1-signal-cable PDFDocument3 pages-شرح كابل الاى ون بالتفصيل (E1) - e1-signal-cable PDFBasemNo ratings yet
- Job Sheet 1Document5 pagesJob Sheet 1Sue AzizNo ratings yet
- Simocrane Drive Basedtechnology v10 Sp1Document67 pagesSimocrane Drive Basedtechnology v10 Sp1Nakpane SonhayeNo ratings yet
- Studyguide Ead 410 2013Document29 pagesStudyguide Ead 410 2013Herless FloresNo ratings yet
- ASMi-54 SHDSL.bis Modem Extends High-Speed Services Over Copper PairsDocument8 pagesASMi-54 SHDSL.bis Modem Extends High-Speed Services Over Copper PairsmariagodeanuNo ratings yet
- 1MW Rooftop Solar PV Power Plant Permit PDFDocument9 pages1MW Rooftop Solar PV Power Plant Permit PDFPadmanathan Kasinathan KNo ratings yet
- Traction Motor Type Tm4907Bz: Technical DataDocument12 pagesTraction Motor Type Tm4907Bz: Technical DataPratibha Patel100% (1)
- APC Symmetra PX-2Document8 pagesAPC Symmetra PX-2drastir_777No ratings yet
- BS-200 Service Manual (v1.1)Document123 pagesBS-200 Service Manual (v1.1)Byron Cuevas Mendoza100% (5)
- CB 1100 control board accepts analog and digital inputDocument4 pagesCB 1100 control board accepts analog and digital inputMuhammad Bilal KhattakNo ratings yet
- A Circularly Polarized Patch Antenna Array For Ku-Band Data-LinkDocument2 pagesA Circularly Polarized Patch Antenna Array For Ku-Band Data-LinkTolgahan TÜYLÜNo ratings yet
- Literature Review On Solar MPPT SystemsDocument8 pagesLiterature Review On Solar MPPT Systemsafmabkbhckmajg100% (1)
- Intel® Desktop Board D102GGC2Document64 pagesIntel® Desktop Board D102GGC2Nataniel MendozaNo ratings yet
- Pti 25 30 T4F - OmDocument24 pagesPti 25 30 T4F - OmYacine DaliNo ratings yet
- Capitulo 6Document33 pagesCapitulo 6Alberto Cañongo100% (1)
- Adani BessDocument45 pagesAdani Bessdan_geplNo ratings yet
- Versamate Cleanroom Receptacle PR19Document1 pageVersamate Cleanroom Receptacle PR19Anonymous llBSa7No ratings yet
- Power Quality Issues in Microgrid and Its SolutionsDocument32 pagesPower Quality Issues in Microgrid and Its SolutionsDinu DasNo ratings yet
- Catalogue - JoystickDocument6 pagesCatalogue - Joystickhikmah tvNo ratings yet
- 1 s2.0 S001999586590241X MainDocument48 pages1 s2.0 S001999586590241X MainNestor GlezNo ratings yet
- PLUS+1® Controllers MC050-055 and MC050-05B: Data SheetDocument2 pagesPLUS+1® Controllers MC050-055 and MC050-05B: Data SheetMarcos AraujoNo ratings yet
- APC-BM Series Data SheetDocument3 pagesAPC-BM Series Data Sheetemoi72No ratings yet
- Module 2 - DC Motor DrivesDocument61 pagesModule 2 - DC Motor DrivesMohammad Amirul ShafiqNo ratings yet
- Amoghweye Felix Emuobobowansa Cv1234Document3 pagesAmoghweye Felix Emuobobowansa Cv1234felixamoghweyeNo ratings yet
- Typical Questions Rev1Document8 pagesTypical Questions Rev1hbgdiatmNo ratings yet