You might also like
- 5.-NXT Spike Buillding PDFDocument65 pages5.-NXT Spike Buillding PDFRosendo XrNo ratings yet
- Active LmeDocument8 pagesActive Lme0505900399No ratings yet
- GEN II EV3 Simple Simon Soccer Player and Goalie HTDocument16 pagesGEN II EV3 Simple Simon Soccer Player and Goalie HTrezal yusoffNo ratings yet
- Built Tribot100Document59 pagesBuilt Tribot100Felipe MartinezNo ratings yet
- NXT Emulator Guide PDFDocument30 pagesNXT Emulator Guide PDFcarlo2563No ratings yet
- NXTway-GS Building InstructionsDocument17 pagesNXTway-GS Building InstructionsVinay SandeepNo ratings yet
- NXT Ballbot Building Instructions PDFDocument28 pagesNXT Ballbot Building Instructions PDFzohaibshabirNo ratings yet
- Build 229-Piece Lego Robot Model with Step-by-Step InstructionsDocument89 pagesBuild 229-Piece Lego Robot Model with Step-by-Step InstructionsEduardo SocasNo ratings yet
- Beginning NXT Programming WorkshopDocument102 pagesBeginning NXT Programming Workshopczar117100% (1)
- LEGO Mindstorms NXT 2.0 For Teens (2011)Document337 pagesLEGO Mindstorms NXT 2.0 For Teens (2011)JAVIER ALONSO MURILLO MURILLONo ratings yet
- Ev3 User Guide enDocument69 pagesEv3 User Guide enpierdonneNo ratings yet
- Galaxy Robo SpiderDocument69 pagesGalaxy Robo SpideretwinningNo ratings yet
- 8700 - Expert Builder Power PackDocument3 pages8700 - Expert Builder Power PackabigarxesNo ratings yet
- Formula Ev3: A Racing Robot: Race Car, Shown in Figure 12-1Document8 pagesFormula Ev3: A Racing Robot: Race Car, Shown in Figure 12-1Juan GomezNo ratings yet
- Sonda Espacial WE - DoDocument44 pagesSonda Espacial WE - DoEpicSaxGuyNo ratings yet
- Lego WeDo Worksheet - Lego FanDocument2 pagesLego WeDo Worksheet - Lego FanEl Blog de la Profe Isa0% (1)
- Parts List: Qty Color Description Qty Color DescriptionDocument4 pagesParts List: Qty Color Description Qty Color DescriptionGerald Ochoa PerezNo ratings yet
- Secret Invention: Model NameDocument55 pagesSecret Invention: Model NameetwinningNo ratings yet
- Appendix 2-LEGO Mind Storms NXT Keypad SchematicDocument1 pageAppendix 2-LEGO Mind Storms NXT Keypad SchematicAlfon DeLerínNo ratings yet
- Rem Bot: Building InstructionsDocument24 pagesRem Bot: Building Instructionsandreys12No ratings yet
- 8285 Modification PackageDocument21 pages8285 Modification Packagektbflyfish100% (1)
- Technical Instructions On Building Lego Crane TruckDocument84 pagesTechnical Instructions On Building Lego Crane TruckocuibusNo ratings yet
- Lego NXT Mindstorms Bonus Model Classic ClockDocument64 pagesLego NXT Mindstorms Bonus Model Classic ClockandrewheNo ratings yet
- 1411 Steampunk Walker 241 Pieces: A Custom Model Design by Jason AllemannDocument43 pages1411 Steampunk Walker 241 Pieces: A Custom Model Design by Jason AllemannAnonymous RMflbEATRWNo ratings yet
- Robot Arm: Building InstructionsDocument33 pagesRobot Arm: Building InstructionsjjaviertrevinoNo ratings yet
- With-Conveyor-Belt-24v: WebsiteDocument2 pagesWith-Conveyor-Belt-24v: Websiteamina mohammedNo ratings yet
- Ev3 User GuideDocument69 pagesEv3 User GuideLucas BatistaNo ratings yet
- Lego Mindstorm Smart BricksDocument28 pagesLego Mindstorm Smart BricksJohn Paul ReyesNo ratings yet
- Sanet - ST - 2023!03!01 The Ultimate Guide To LEGODocument100 pagesSanet - ST - 2023!03!01 The Ultimate Guide To LEGOHusam SalehNo ratings yet
- Virtual Brick Teachers GuideDocument36 pagesVirtual Brick Teachers GuideandreNo ratings yet
- Ev3micropythonv100 PDFDocument59 pagesEv3micropythonv100 PDFChettamilsNo ratings yet
- Direct Drive Mantis InstructionsDocument22 pagesDirect Drive Mantis InstructionsTato LeonNo ratings yet
- © 2006 LEGO CompanyDocument48 pages© 2006 LEGO Companyandslpz0No ratings yet
- Built Grand Four Belt Rover100Document93 pagesBuilt Grand Four Belt Rover100Felipe Martinez67% (3)
- Robotics With Enchanting 1.1 PDFDocument53 pagesRobotics With Enchanting 1.1 PDFMiguel MendezNo ratings yet
- LEGO Mindstorms Education Kit 9797 User GuideDocument66 pagesLEGO Mindstorms Education Kit 9797 User Guidewsecomp100% (1)
- The Unofficial Lego Technic Builder'S Guide: What Will You Build?Document1 pageThe Unofficial Lego Technic Builder'S Guide: What Will You Build?Isaac Hancock0% (2)
- Sensor en PDFDocument17 pagesSensor en PDFAlimamy KoromaNo ratings yet
- Lego BasicsDocument39 pagesLego BasicsPio_ChronicleNo ratings yet
- Robotics in Education Ejournal: ContentsDocument28 pagesRobotics in Education Ejournal: ContentsΑνδρέας ΜήταλαςNo ratings yet
- The Lego Mindstorms Ev3 Discovery BookDocument5 pagesThe Lego Mindstorms Ev3 Discovery BookPrapussorn Sresanunwong13% (8)
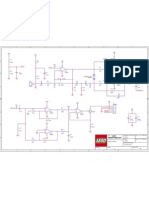
- Appendix 4-LEGO Mind Storms NXT Sound Sensor Hardware SchematicDocument1 pageAppendix 4-LEGO Mind Storms NXT Sound Sensor Hardware SchematicAlfon DeLerín100% (1)
- The Lego Technic Idea Book: Wheeled Wonders - Yoshihito IsogawaDocument4 pagesThe Lego Technic Idea Book: Wheeled Wonders - Yoshihito Isogawadufysico0% (1)
- 10 Cool Lego Mindstorms Dark Side Robots Transports and Creatures Amazing Projects You Can Build in Under An HourDocument257 pages10 Cool Lego Mindstorms Dark Side Robots Transports and Creatures Amazing Projects You Can Build in Under An HourLuciely De Oliveira Silva50% (2)
- Lego Mind Storms Ev 3 Programming BasicsDocument29 pagesLego Mind Storms Ev 3 Programming Basicstushar singh100% (1)
- 9695 Belt-Driven Colour Sorter100Document90 pages9695 Belt-Driven Colour Sorter100Sam Chumbas100% (1)
- Lego Digital DesignerDocument77 pagesLego Digital DesignerRamiro BastarNo ratings yet
- WeDo 2 Teachers GuideDocument217 pagesWeDo 2 Teachers GuideMejri ImedNo ratings yet
- LEGO Theory and Practice for Creative MediaDocument62 pagesLEGO Theory and Practice for Creative MediaMichael PoonNo ratings yet
- Core Set Product Sheet PDFDocument2 pagesCore Set Product Sheet PDFCarlos Roman ZarzaNo ratings yet
- Build A Robot: Prime Lessons Prime LessonsDocument7 pagesBuild A Robot: Prime Lessons Prime LessonsRamaDinakaranNo ratings yet
- Edumóvil: Programando NXT Con NXCDocument72 pagesEdumóvil: Programando NXT Con NXCJ'obbanii StgoNo ratings yet
- Programming LEGO® EV3 My Blocks: Teaching Concepts and Preparing for FLL® CompetitionFrom EverandProgramming LEGO® EV3 My Blocks: Teaching Concepts and Preparing for FLL® CompetitionNo ratings yet
- The LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionFrom EverandThe LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionNo ratings yet
- EMSOFT 2009 Mindstorms TutorialDocument89 pagesEMSOFT 2009 Mindstorms TutorialeeindustrialNo ratings yet
- Testing The Brand New Chinese Image-to-Video I2VGen-XLDocument23 pagesTesting The Brand New Chinese Image-to-Video I2VGen-XLIrakliNo ratings yet
- Lego JavaDocument98 pagesLego JavaPolunomynalsNo ratings yet
- Computer Vision Sandbox - CodeProjectDocument25 pagesComputer Vision Sandbox - CodeProjectgfgomesNo ratings yet
- gOpenMol3 00Document209 pagesgOpenMol3 00Kristhian Alcantar MedinaNo ratings yet
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Document27 pagesSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNo ratings yet
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Document27 pagesSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNo ratings yet
- Rectifier PaperDocument19 pagesRectifier PaperMohamad SyazwanNo ratings yet
- Muhd Halalluddin Bin Abdul Rahim 1Document40 pagesMuhd Halalluddin Bin Abdul Rahim 1Mohamad SyazwanNo ratings yet
- c2Document29 pagesc2Mohamad SyazwanNo ratings yet
- Experiment 5 Lab Report Uitm Malaysian CollegeDocument16 pagesExperiment 5 Lab Report Uitm Malaysian CollegeFaris Muhammad0% (1)
- EE 410 Lab1 Fall10-1305411901Document27 pagesEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNo ratings yet
- RectifiersDocument28 pagesRectifiersMohamad SyazwanNo ratings yet
- Pejovic Kolar Final 1Document8 pagesPejovic Kolar Final 1Mohamad Syazwan100% (1)
- Lecture 7Document33 pagesLecture 7Mohamad SyazwanNo ratings yet
- Tutorial 5Document2 pagesTutorial 5Mohamad SyazwanNo ratings yet
- CHOPPER CIRCUIT ANALYSISDocument1 pageCHOPPER CIRCUIT ANALYSISMohamad SyazwanNo ratings yet
- L12 Single Phase Uncontrolled RectifierDocument22 pagesL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- CH4Document55 pagesCH4Mohamad SyazwanNo ratings yet
- Controller Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Document27 pagesController Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Mohamad SyazwanNo ratings yet
- Tutorial 2Document1 pageTutorial 2Mohamad SyazwanNo ratings yet
- Guide 1Document2 pagesGuide 1Saithila ThilaNo ratings yet
- Tutorial 3Document2 pagesTutorial 3Mohamad SyazwanNo ratings yet
- Tutorial 1Document2 pagesTutorial 1Mohamad SyazwanNo ratings yet
- Common Forms of BusinessDocument22 pagesCommon Forms of BusinessPanda DutchNo ratings yet
- Entrepreneurship Studies Chapter 1 1232804769353991 2Document26 pagesEntrepreneurship Studies Chapter 1 1232804769353991 2fast nuNo ratings yet
- Fresh GraduateDocument2 pagesFresh GraduateArin MuhammadNo ratings yet
- Chapter Four: 4.1 Project GoalDocument5 pagesChapter Four: 4.1 Project GoalMohamad SyazwanNo ratings yet
- EntrepreneurshipDocument83 pagesEntrepreneurshipRakeshh Bansi TalrejaNo ratings yet
- MachineDocument23 pagesMachineMohamad SyazwanNo ratings yet
- Build an NXT Smart HouseDocument3 pagesBuild an NXT Smart HouseMohamad SyazwanNo ratings yet
- Assignment2 Solution 3rd EditionDocument4 pagesAssignment2 Solution 3rd EditionMohamad SyazwanNo ratings yet
- DEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringDocument3 pagesDEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringMohamad SyazwanNo ratings yet
- Zener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Document5 pagesZener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Mohamad SyazwanNo ratings yet
- ReadmeDocument15 pagesReadmenazar_poenyaxNo ratings yet
- Ricoh Is330dc ScannerDocument60 pagesRicoh Is330dc ScannerJoey SmitheyNo ratings yet
- HDVG User GuideDocument48 pagesHDVG User GuidetanjamicroNo ratings yet
- Hyper TableDocument12 pagesHyper TableSukhvinder SinghNo ratings yet
- Comp RecDocument60 pagesComp RecMichael WellsNo ratings yet
- Case StudyDocument10 pagesCase StudySuman SinghNo ratings yet
- The tIDE Java IDE Manual: Draft Version, Not Yet CompleteDocument45 pagesThe tIDE Java IDE Manual: Draft Version, Not Yet CompleteMario Ayil HuicabNo ratings yet
- Programmable DC Power Supply FeaturesDocument2 pagesProgrammable DC Power Supply FeaturesdigiarkanandNo ratings yet
- TEND Hoist-Power Push Button SwitchDocument5 pagesTEND Hoist-Power Push Button SwitchRajko Rale AntusevicNo ratings yet
- Webleaflet ENG Amiko Mira WiFi v170719Document2 pagesWebleaflet ENG Amiko Mira WiFi v170719krauseNo ratings yet
- Registers and CountersDocument28 pagesRegisters and CountersHammadMehmoodNo ratings yet
- Id ProDocument50 pagesId PromohamedNo ratings yet
- C BMJ 0082Document1 pageC BMJ 0082José RodríguezNo ratings yet
- AUG-035-0-EN - (Remote Access For Allen Bradley PLCS)Document45 pagesAUG-035-0-EN - (Remote Access For Allen Bradley PLCS)QuantumAutomationNo ratings yet
- Control Unit Lesson Explains Computer ComponentsDocument38 pagesControl Unit Lesson Explains Computer ComponentsIvan EinsteinNo ratings yet
- NXI5 WINInstlDocument85 pagesNXI5 WINInstljaiguNo ratings yet
- 11KV VCBDocument3 pages11KV VCBeagles1109No ratings yet
- Thinkpad T14 Gen 1 (Amd) : Business Devices That Are A Class ApartDocument2 pagesThinkpad T14 Gen 1 (Amd) : Business Devices That Are A Class ApartLuisNo ratings yet
- ECE 523 Expt No. 1Document5 pagesECE 523 Expt No. 1Jerichson LautaNo ratings yet
- Access 2013 Cheat SheetDocument3 pagesAccess 2013 Cheat SheetelecmaticNo ratings yet
- Control SystemDocument3 pagesControl SystemsryunkNo ratings yet
- Scalable OpenSource StorageDocument31 pagesScalable OpenSource Storagejweb911No ratings yet
- Anshu ResumeDocument3 pagesAnshu ResumeAnshu AnandNo ratings yet
- Motifxs en Add v160 A0Document3 pagesMotifxs en Add v160 A0Paulo SilvaNo ratings yet
- Sample-Question-Paper - Digital Electronics and Microcontroller ApplicationsDocument5 pagesSample-Question-Paper - Digital Electronics and Microcontroller ApplicationsAbhishek ManeNo ratings yet
- Kone Manual InstalareDocument15 pagesKone Manual InstalareAndreea DanielaNo ratings yet
- Considerations, Best Practices and Requirements For A Virtualised Mobile NetworkDocument25 pagesConsiderations, Best Practices and Requirements For A Virtualised Mobile NetworkArbabNo ratings yet
- Haitian Jupiter SeriesDocument6 pagesHaitian Jupiter SeriesClaudio Rafael Deola SadaNo ratings yet
- The Microsoft-Nokia Strategic Alliance PDFDocument25 pagesThe Microsoft-Nokia Strategic Alliance PDFmehedee129No ratings yet
- The Secret Power by Corelli, Marie, 1855-1924Document199 pagesThe Secret Power by Corelli, Marie, 1855-1924Gutenberg.orgNo ratings yet