You might also like
- BioloidCControl User's Guide PDFDocument10 pagesBioloidCControl User's Guide PDFDario CabascangoNo ratings yet
- Lab0 CDocument5 pagesLab0 CJorge Cruz Mancilla100% (1)
- Owl RobotDocument32 pagesOwl RobotgerpemNo ratings yet
- CDocument12 pagesCPetzy MarianNo ratings yet
- JarvisDocument5 pagesJarvisJoshua VargheseNo ratings yet
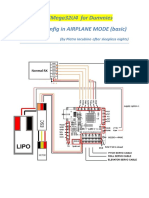
- Nanowii Atmega32U4 For Dummies - How To Config in Airplane Mode (Basic)Document6 pagesNanowii Atmega32U4 For Dummies - How To Config in Airplane Mode (Basic)zileNo ratings yet
- Configuration HDocument115 pagesConfiguration Hمحمد نجوي ساريفNo ratings yet
- Topic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Document94 pagesTopic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Aya AmirNo ratings yet
- Robo Remo ManualDocument32 pagesRobo Remo ManualPablo GaraizarNo ratings yet
- Default ServercmdlineDocument3 pagesDefault ServercmdlineJacob LanesNo ratings yet
- AVR Training Kit LabbookDocument37 pagesAVR Training Kit LabbookTeguh GinanjarNo ratings yet
- CCS ExampleDocument28 pagesCCS Exampletuane07100% (3)
- Instruction Guide Gang ProgrammerDocument21 pagesInstruction Guide Gang ProgrammerspotNo ratings yet
- Course On MicrocontrollersDocument115 pagesCourse On MicrocontrollersKorom ChandNo ratings yet
- Interfacing The DS18X20/DS1822 1-Wire® Temperature Sensor in A Microcontroller EnvironmentDocument14 pagesInterfacing The DS18X20/DS1822 1-Wire® Temperature Sensor in A Microcontroller EnvironmentHoàng Phú NguyễnNo ratings yet
- AVRStudio C Programming With Arduino RevC PDFDocument40 pagesAVRStudio C Programming With Arduino RevC PDFEduardo Garcia BreijoNo ratings yet
- EMG EKG Code For ARDUINO SHIELDDocument4 pagesEMG EKG Code For ARDUINO SHIELDbeniamin Alexandru100% (1)
- Arduino Cheat Sheet: Structure Digital I/O Data TypesDocument1 pageArduino Cheat Sheet: Structure Digital I/O Data TypesMuhammad WahyudinNo ratings yet
- AVRStudio C Programming With Arduino RevCDocument40 pagesAVRStudio C Programming With Arduino RevCTran Tien DatNo ratings yet
- Multiwii Software GUIDEDocument10 pagesMultiwii Software GUIDEHiroshi TakeshiNo ratings yet
- Spi Protocol Verilog Code ExplanationDocument15 pagesSpi Protocol Verilog Code Explanationgokul pNo ratings yet
- Questions and Answers-1Document6 pagesQuestions and Answers-1Sandeep SinghNo ratings yet
- Win-Test Quick GuideDocument17 pagesWin-Test Quick GuideduoneudNo ratings yet
- Zoneminder HelpDocument28 pagesZoneminder HelpSan JivNo ratings yet
- Acro Whoop FC ManualDocument12 pagesAcro Whoop FC ManualChristopher HudginsNo ratings yet
- Akimbot ReadMeDocument7 pagesAkimbot ReadMeMarius Cristian100% (1)
- Password Recovery Procedure For Catalyst 4500Document12 pagesPassword Recovery Procedure For Catalyst 4500Getachew MekonnenNo ratings yet
- AVR Microcontroller Fuse Bits Configuration CreatiDocument9 pagesAVR Microcontroller Fuse Bits Configuration CreatiFumino MizutoriNo ratings yet
- Pes1ug20ee056 - DSP - Assignment 10042023Document11 pagesPes1ug20ee056 - DSP - Assignment 10042023The Lord Of Cubing.No ratings yet
- Configuring Brocade SwitchesDocument28 pagesConfiguring Brocade SwitchessgiovanniNo ratings yet
- Ardu5 para S4ADocument6 pagesArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSANo ratings yet
- X - Important:: /drives 192.168.1.112:1.0 SSHDocument10 pagesX - Important:: /drives 192.168.1.112:1.0 SSHajaytp007No ratings yet
- Motherboard ComponentsDocument6 pagesMotherboard ComponentsaudreyNo ratings yet
- Serial Driver Wago ControllersDocument16 pagesSerial Driver Wago ControllersFredyMirreNo ratings yet
- Microprofessor-1 Monitor Program Assembly SourceDocument27 pagesMicroprofessor-1 Monitor Program Assembly SourceJose Luis Abasolo MayorNo ratings yet
- I2CDocument6 pagesI2CStudy TimeNo ratings yet
- Laboratorio DroneDocument7 pagesLaboratorio DroneFernando MontanhaNo ratings yet
- RoboBASIC English Command Instruction Manual (Version 2.10 20051118)Document149 pagesRoboBASIC English Command Instruction Manual (Version 2.10 20051118)Pham Hoang Minh100% (2)
- Maestro PDFDocument67 pagesMaestro PDFFelipe Diaz100% (1)
- Introduction To Robotc ProgrammingDocument2 pagesIntroduction To Robotc ProgrammingleonardoduarteNo ratings yet
- LSU EE 3755 - Fall 2012 - Computer Organization Verilog Notes 4 - Synthesis Under ConstructionDocument20 pagesLSU EE 3755 - Fall 2012 - Computer Organization Verilog Notes 4 - Synthesis Under ConstructionMerupu DebbaNo ratings yet
- Hummer-Bot-2.0 Instruction Manual v.2.3Document111 pagesHummer-Bot-2.0 Instruction Manual v.2.3HenzomaticNo ratings yet
- 03 AVR ProgrammingDocument38 pages03 AVR ProgrammingPriscillaNo ratings yet
- 4 Wire Resistive Touch Screen Controlled Robot With Atmega32Document6 pages4 Wire Resistive Touch Screen Controlled Robot With Atmega32Emin KültürelNo ratings yet
- ThinkPad Mobile Internet - ArchWiki Seting Modem Thinkpad t440Document6 pagesThinkPad Mobile Internet - ArchWiki Seting Modem Thinkpad t440Zainul ArifinNo ratings yet
- Startup HandbookDocument274 pagesStartup Handbookedgard_gonzález_3No ratings yet
- SPLAT Expert Mode TipsDocument11 pagesSPLAT Expert Mode TipsAndy HarcupNo ratings yet
- Phoenix DriverDocument6 pagesPhoenix DriversaidNo ratings yet
- ReadmeDocument5 pagesReadmehjk6500No ratings yet
- 2 SUMMIT-System Installation and Configuration ManualDocument18 pages2 SUMMIT-System Installation and Configuration ManualPablo Melero CazorlaNo ratings yet
- Writing Code For Microcontrollers: A Rough Outline For Your ProgramDocument14 pagesWriting Code For Microcontrollers: A Rough Outline For Your ProgramSritam Kumar DashNo ratings yet
- E1 LAB 11-5-1 SolutionDocument20 pagesE1 LAB 11-5-1 SolutionChris GirouardNo ratings yet
- Bagian Bang NugiDocument10 pagesBagian Bang NugiNugraha Triokta PutraNo ratings yet
- NodeB MML&Alarm VerDocument24 pagesNodeB MML&Alarm Verhi_demirel118978% (9)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (1)
- End of Course QuizDocument31 pagesEnd of Course QuizEduardo Hernández95% (60)
- Standard Modifier Dictionary 2015 - 219851110913044932Document2 pagesStandard Modifier Dictionary 2015 - 219851110913044932Sorin100% (3)
- Vtest Results: Congratulations, You Have PassedDocument19 pagesVtest Results: Congratulations, You Have PassedThuNo ratings yet
- Tarpapel Verb TenseDocument17 pagesTarpapel Verb TenseShale PilapilNo ratings yet
- How To Punctuate: by Russell BakerDocument3 pagesHow To Punctuate: by Russell BakerAhmed El-AdawyNo ratings yet
- Modern Icons: 1 GRAMMAR Relative Clauses: Defining and Non-DefiningDocument3 pagesModern Icons: 1 GRAMMAR Relative Clauses: Defining and Non-Definingjhon kevinNo ratings yet
- I Am Not A Scholar of English or LiteratureDocument3 pagesI Am Not A Scholar of English or LiteratureJane SandovalNo ratings yet
- Komatsu Crane Lw250 5 Shop Manual Sebm008905Document22 pagesKomatsu Crane Lw250 5 Shop Manual Sebm008905nathanielsmith070288fqb100% (124)
- 3rd Lesson Comparative and Superlative AdjectivesDocument4 pages3rd Lesson Comparative and Superlative AdjectivessaliaNo ratings yet
- PhraseologyDocument5 pagesPhraseology77cksp6cdqNo ratings yet
- The Present Perfect Continuous Activities Promoting Classroom Dynamics Group Form - 19066Document2 pagesThe Present Perfect Continuous Activities Promoting Classroom Dynamics Group Form - 19066muvendra67% (3)
- Literature Review: 2.1 Public SpeakingDocument11 pagesLiterature Review: 2.1 Public SpeakingRizka SakinahNo ratings yet
- Level 9 Sentence Completion 1Document3 pagesLevel 9 Sentence Completion 1Severa DasNo ratings yet
- Lidija 1 IntroductionDocument18 pagesLidija 1 Introductionsammer30No ratings yet
- Erph Update - IsNINDocument8 pagesErph Update - IsNINKazuhiko RikimaruNo ratings yet
- The ModifierDocument1 pageThe ModifierRosalyn AdoNo ratings yet
- Naati Forms and FeesDocument2 pagesNaati Forms and FeeslafrancesseNo ratings yet
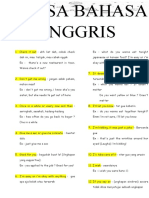
- Frasa Bahasa InggrisDocument19 pagesFrasa Bahasa InggrisDayu Punik ApsariNo ratings yet
- Ks First CaseDocument12 pagesKs First CaseSelinaGale9No ratings yet
- Lesson Plan (Noisy Neighbor)Document4 pagesLesson Plan (Noisy Neighbor)Juan Carlos Solís RiveraNo ratings yet
- Education Innovation Capsule ProposalDocument4 pagesEducation Innovation Capsule ProposalAndrea Lyn PalmaNo ratings yet
- Public Notice - New Translator - Sri Lanka (15.01.2024)Document1 pagePublic Notice - New Translator - Sri Lanka (15.01.2024)Rodrigo da FrotaNo ratings yet
- Third Quarter Exam in Reading and Writing SkillsDocument2 pagesThird Quarter Exam in Reading and Writing SkillsQuennee Ronquillo EscobilloNo ratings yet
- Eng - B.Tech. Syllabus - TextDocument126 pagesEng - B.Tech. Syllabus - TextManoj ChallaNo ratings yet
- Hand-Out 12 (Subanen, Manobo, Tiruray)Document3 pagesHand-Out 12 (Subanen, Manobo, Tiruray)Renilyn GuindoawonNo ratings yet
- Vowel SoundsDocument3 pagesVowel SoundsGusni DarianiNo ratings yet
- The Context-Text Connection: Gerot and Wignell (P.10)Document17 pagesThe Context-Text Connection: Gerot and Wignell (P.10)Difa Putri HerdityaNo ratings yet
- Hari ResumeDocument4 pagesHari ResumerthottempudiNo ratings yet
- What Are Interesting Language Facts About The Dutch Language?Document8 pagesWhat Are Interesting Language Facts About The Dutch Language?DutchTransNo ratings yet
- The Effect of Explicit Grammar Instruction.2595056Document16 pagesThe Effect of Explicit Grammar Instruction.2595056Grace KarimNo ratings yet