You might also like
- What Is BalancingDocument1 pageWhat Is BalancingWon-young SeoNo ratings yet
- JSAE Paper Number 20025335Document4 pagesJSAE Paper Number 20025335Won-young SeoNo ratings yet
- Weighting FilterDocument3 pagesWeighting FilterWon-young SeoNo ratings yet
- Hy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodDocument8 pagesHy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodWon-young SeoNo ratings yet
- Non Stationary STSFDocument42 pagesNon Stationary STSFWon-young SeoNo ratings yet
- NAS102 Dynamic ExerciseDocument762 pagesNAS102 Dynamic ExerciseWon-young Seo100% (1)
- Bp1850 (Modal Test Consultant)Document20 pagesBp1850 (Modal Test Consultant)Won-young SeoNo ratings yet
- 1 Brake System SessionDocument13 pages1 Brake System SessionWon-young SeoNo ratings yet
- 2003 Internoise CrossSpecBFDocument8 pages2003 Internoise CrossSpecBFWon-young SeoNo ratings yet
- 2 NVH Characteristics of Brake System - 2004Document9 pages2 NVH Characteristics of Brake System - 2004Won-young SeoNo ratings yet
- Order Tracking AnalysisDocument51 pagesOrder Tracking AnalysisWon-young SeoNo ratings yet
- FFT Analysis - Part IDocument44 pagesFFT Analysis - Part IOmegaUserNo ratings yet
- Digital Filter Techniques Vs FFT Techniques For Damping MeasurementsDocument42 pagesDigital Filter Techniques Vs FFT Techniques For Damping MeasurementsWon-young SeoNo ratings yet
- Non Stationary STSFDocument42 pagesNon Stationary STSFWon-young SeoNo ratings yet
- Dyn-X Technology 160 DB in One Input RangeDocument54 pagesDyn-X Technology 160 DB in One Input RangeWon-young SeoNo ratings yet
- Bp1850 (Modal Test Consultant)Document20 pagesBp1850 (Modal Test Consultant)Won-young SeoNo ratings yet
- Properties and Calibration of Laboratory Standard MicrophonesDocument45 pagesProperties and Calibration of Laboratory Standard MicrophonesWon-young SeoNo ratings yet
- Dyn-X Technology 160 DB in One Input RangeDocument54 pagesDyn-X Technology 160 DB in One Input RangeWon-young SeoNo ratings yet
- Acoustic Solutions in The Design of A Measurement Microphone For Surface MountingDocument57 pagesAcoustic Solutions in The Design of A Measurement Microphone For Surface MountingWon-young SeoNo ratings yet
- Dual Channel FFT Analysis - Part1Document60 pagesDual Channel FFT Analysis - Part1Won-young SeoNo ratings yet
- Danish Primay Laboratory of AcousticsDocument40 pagesDanish Primay Laboratory of AcousticsWon-young SeoNo ratings yet
- Dual Channel FFT Analysis - Part2Document52 pagesDual Channel FFT Analysis - Part2Won-young SeoNo ratings yet
- Damping MeasurementsDocument50 pagesDamping MeasurementsWon-young Seo100% (1)
- FFT Analysis - Part IIDocument48 pagesFFT Analysis - Part IIOmegaUserNo ratings yet
- Characteristics of The Vold-Kalman Order Tracking FilterDocument65 pagesCharacteristics of The Vold-Kalman Order Tracking FilterWon-young SeoNo ratings yet
- Reliability of Deepwater Subsea BOP SystemsDocument133 pagesReliability of Deepwater Subsea BOP SystemsPaolo RavioloNo ratings yet
- Be An FormingDocument54 pagesBe An FormingWon-young SeoNo ratings yet
- Tier III SCR For Large 2-Stroke MAN B&W Diesel EnginesDocument6 pagesTier III SCR For Large 2-Stroke MAN B&W Diesel EnginesWon-young SeoNo ratings yet
- Tier III EGR For Large 2-Stroke MAN B&W Diesel EnginesDocument6 pagesTier III EGR For Large 2-Stroke MAN B&W Diesel EnginesWon-young Seo100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 100 kWp Rooftop Solar PV Plant Project Report for Ghaziabad FactoryDocument25 pages100 kWp Rooftop Solar PV Plant Project Report for Ghaziabad FactoryvikashNo ratings yet
- EC424 Monetary Economics (Michaelmas Term) Additional QuestionsDocument5 pagesEC424 Monetary Economics (Michaelmas Term) Additional QuestionsSteamPunkNo ratings yet
- 2024 Quiz Bee Math 7Document1 page2024 Quiz Bee Math 7Jabez Magda GenorgaNo ratings yet
- Microelectronics: Circuit Analysis and Design, 4 Edition by D. A. Neamen Problem SolutionsDocument6 pagesMicroelectronics: Circuit Analysis and Design, 4 Edition by D. A. Neamen Problem SolutionsJano Jesus AlexNo ratings yet
- SERIES-90 180cc SERVICE BLN-2-41695 1997-05Document52 pagesSERIES-90 180cc SERVICE BLN-2-41695 1997-05thailanNo ratings yet
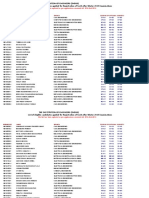
- List of Eligible Candidates Applied For Registration of Secb After Winter 2015 Examinations The Institution of Engineers (India)Document9 pagesList of Eligible Candidates Applied For Registration of Secb After Winter 2015 Examinations The Institution of Engineers (India)Sateesh NayaniNo ratings yet
- Peabody y Movent ABCDocument11 pagesPeabody y Movent ABCIngrid BarkoNo ratings yet
- SAP Table BufferingDocument31 pagesSAP Table Bufferingashok_oleti100% (3)
- Lecture 2 - Kinematics Fundamentals - Part ADocument30 pagesLecture 2 - Kinematics Fundamentals - Part ASuaid Tariq BalghariNo ratings yet
- Answer: 60% Answer: Geography 55%: Harmonic Mean-Is Good at Handling Large OutliersDocument2 pagesAnswer: 60% Answer: Geography 55%: Harmonic Mean-Is Good at Handling Large Outliersroshia maeNo ratings yet
- Forex - Nnet Vs RegDocument6 pagesForex - Nnet Vs RegAnshik BansalNo ratings yet
- 2023 Key Stage 2 Mathematics Braille Transcript Paper 1 ArithmeticDocument8 pages2023 Key Stage 2 Mathematics Braille Transcript Paper 1 ArithmeticMini WorldNo ratings yet
- Ace Signal and System PDFDocument144 pagesAce Signal and System PDFYash Rai100% (1)
- C34 January 2014 (IAL)Document44 pagesC34 January 2014 (IAL)SandyDavidNo ratings yet
- Use Jinja2 To Create TemplatesDocument44 pagesUse Jinja2 To Create TemplatesmNo ratings yet
- Hadoop HiveDocument61 pagesHadoop HivemustaqNo ratings yet
- Lumion PRO 5Document6 pagesLumion PRO 5paparock34No ratings yet
- Efectele Pe Termen Lung Ale Alaptatului OMSDocument74 pagesEfectele Pe Termen Lung Ale Alaptatului OMSbobocraiNo ratings yet
- Administering Agilent 3070 Systems (MS Windows NT and 2000) Chapter 8Document60 pagesAdministering Agilent 3070 Systems (MS Windows NT and 2000) Chapter 8Adam KaNo ratings yet
- Elec4602 NotesDocument34 pagesElec4602 NotesDavid VangNo ratings yet
- Components of A BarrageDocument21 pagesComponents of A BarrageEngr.Hamid Ismail CheemaNo ratings yet
- Astrology, Believe It or Not - OCRDocument155 pagesAstrology, Believe It or Not - OCRShashwat Singh Pokharel100% (2)
- Standard Rotary Pulse Encoder Operation Replacement SettingDocument8 pagesStandard Rotary Pulse Encoder Operation Replacement SettingGuesh Gebrekidan50% (2)
- Cube Nets Non-Verbal Reasoning IntroductionDocument6 pagesCube Nets Non-Verbal Reasoning Introductionmirali74No ratings yet
- Biophoton Light TherapyDocument1 pageBiophoton Light TherapyVíctor ValdezNo ratings yet
- Non-Performing Assets: A Comparative Study Ofsbi&Icici Bank From 2014-2017Document8 pagesNon-Performing Assets: A Comparative Study Ofsbi&Icici Bank From 2014-2017Shubham RautNo ratings yet
- Laing Electric Heater-CirculatorDocument20 pagesLaing Electric Heater-Circulatorkamilawehbe100% (1)
- Powerful Production Pumps for Deep Geothermal ProjectsDocument4 pagesPowerful Production Pumps for Deep Geothermal ProjectsAchraf AkidNo ratings yet
- Flender Technical HandbookDocument69 pagesFlender Technical HandbookAhmed Emad AhmedNo ratings yet
- Migrating Your SQL Server Workloads To PostgreSQL - Part 3 - CodeProjectDocument6 pagesMigrating Your SQL Server Workloads To PostgreSQL - Part 3 - CodeProjectgfgomesNo ratings yet