You might also like
- AT6501 (R-13) Notes PDFDocument131 pagesAT6501 (R-13) Notes PDFAashiq NawinNo ratings yet
- Automotive TransmissionDocument146 pagesAutomotive TransmissionTony Neal100% (1)
- AT6501 UwDocument132 pagesAT6501 UwAjithNo ratings yet
- Automotive Transmission NewDocument147 pagesAutomotive Transmission NewhodvmkvecautoNo ratings yet
- Unit-2-Automobile EnggDocument23 pagesUnit-2-Automobile EnggPrashant BhumireddyNo ratings yet
- 92 Automotive Power Train Service RevisedDocument92 pages92 Automotive Power Train Service Reviseddmc constructionNo ratings yet
- Automobile Clutch: Aim To Study and Prepare Report On The Constructional Details, Working Principles andDocument4 pagesAutomobile Clutch: Aim To Study and Prepare Report On The Constructional Details, Working Principles andசிவ சங்கர்No ratings yet
- Transmission Systems OverviewDocument168 pagesTransmission Systems Overviewriyaz ahmedNo ratings yet
- CLUTCHES All DetailsDocument36 pagesCLUTCHES All DetailsArunavNo ratings yet
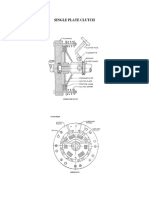
- Single Plate ClutchDocument15 pagesSingle Plate ClutchKyaw MinAungNo ratings yet
- Unit 3 ClutchesDocument54 pagesUnit 3 Clutchesswapnil pandeNo ratings yet
- Clutch and Types of Clutches (C)Document11 pagesClutch and Types of Clutches (C)Rahul Kumar100% (1)
- DoME Report (009 & 019)Document9 pagesDoME Report (009 & 019)Muhammad WaleedNo ratings yet
- EXPERIMENT No 3 - Clutch SystemDocument4 pagesEXPERIMENT No 3 - Clutch SystemVaibhav RathoreNo ratings yet
- Clutch: The Power Developed Inside The Engine Is Available at The Crankshaft ForDocument15 pagesClutch: The Power Developed Inside The Engine Is Available at The Crankshaft ForYashvir SinghNo ratings yet
- ClutchDocument5 pagesClutchyudhisthar0110% (1)
- Mechanics of Machines ME2031: Lab Instructor: Awais LiaqatDocument21 pagesMechanics of Machines ME2031: Lab Instructor: Awais LiaqatAnonymous B0cm7LZhNo ratings yet
- Clutch Final 01Document15 pagesClutch Final 01Joe mNo ratings yet
- AE Unit 3 Transmission System NotesDocument15 pagesAE Unit 3 Transmission System Notessemmat1802No ratings yet
- Automobile Engg (Unit-05)Document38 pagesAutomobile Engg (Unit-05)SUDHARSHAN REDDYNo ratings yet
- Vacuum ClutchDocument8 pagesVacuum Clutchprithvi mannNo ratings yet
- Automobile Clutch EngineeringDocument13 pagesAutomobile Clutch Engineeringp_cheta11No ratings yet
- Different Types of Clutch Explained in Detail Notes PDFDocument10 pagesDifferent Types of Clutch Explained in Detail Notes PDFMahihu KuriaNo ratings yet
- Auto Transmission - NotesDocument34 pagesAuto Transmission - Notesvandanaharikumar100% (2)
- Clutch PDFDocument60 pagesClutch PDFAyush Kumar50% (2)
- Galgotias University: Laboratory ManualDocument52 pagesGalgotias University: Laboratory ManualAgnivesh SharmaNo ratings yet
- Cert Drive TrainDocument30 pagesCert Drive TrainOKIDI Thomas BecketNo ratings yet
- AUTOMOBILEDocument14 pagesAUTOMOBILEabhinandsofficialNo ratings yet
- Design of Clutch Plate For Light Motor Vehicle NewDocument14 pagesDesign of Clutch Plate For Light Motor Vehicle NewKedar BardeNo ratings yet
- Single Plate and Multiplate ClutchDocument13 pagesSingle Plate and Multiplate ClutchParitosh ParasharNo ratings yet
- Clutch Types and ConstructionDocument87 pagesClutch Types and Constructionaniket rautNo ratings yet
- Mechanism and Types of ClutchesDocument41 pagesMechanism and Types of Clutchessarath100% (1)
- Working of Single Plate ClutchDocument1 pageWorking of Single Plate ClutchBikash Das50% (2)
- CLUTCHES AND BRAKES: MOTION CONTROL ELEMENTSDocument33 pagesCLUTCHES AND BRAKES: MOTION CONTROL ELEMENTSToleraNo ratings yet
- The Service Manual of CIMC Dump Trucks - ClutchDocument184 pagesThe Service Manual of CIMC Dump Trucks - ClutchHenry Marchena100% (1)
- Jose Valen 10Document19 pagesJose Valen 10Meghan NielsenNo ratings yet
- Single Plate ClutchDocument4 pagesSingle Plate Clutchsaffrin0% (2)
- Report On CLUTCH VIJAY KALEDocument21 pagesReport On CLUTCH VIJAY KALEChinmay AlandkarNo ratings yet
- Multi-Plate Clutch: Definition, Components or Parts, Working Principle, Advantages, and Application (PDF)Document8 pagesMulti-Plate Clutch: Definition, Components or Parts, Working Principle, Advantages, and Application (PDF)sameerNo ratings yet
- Clutch Technology ExplainedDocument12 pagesClutch Technology ExplainedabasNo ratings yet
- Clutch & Gearbox Guide in 38 CharactersDocument30 pagesClutch & Gearbox Guide in 38 CharactersManjunath Shettar100% (1)
- Keshav Jangir Seminar Front PageDocument39 pagesKeshav Jangir Seminar Front Pagevideo songNo ratings yet
- 0.rahat Sir AutomobileDocument157 pages0.rahat Sir AutomobileTahammul Islam IbonNo ratings yet
- Brakes and ClutchesDocument20 pagesBrakes and ClutchesHuzaifa YousafNo ratings yet
- What Does The Clutch Pressure Plate Do?Document10 pagesWhat Does The Clutch Pressure Plate Do?Kem Docenos Yam-ocNo ratings yet
- Transmission Unit 3Document103 pagesTransmission Unit 3Ram SaaceNo ratings yet
- Types of ClutchDocument6 pagesTypes of ClutchJairo UrreteNo ratings yet
- Assignment ClutchDocument624 pagesAssignment ClutchSubhash KNo ratings yet
- Clutch 2Document30 pagesClutch 2P.Prem Kumar AP - I - MechanicalNo ratings yet
- Power Units and TransmissionDocument42 pagesPower Units and TransmissionAmarjeet RaiNo ratings yet
- Transmission and Steering Systems ExplainedDocument24 pagesTransmission and Steering Systems ExplainedSai RamNo ratings yet
- ClutchhhDocument3 pagesClutchhhAshok PradhanNo ratings yet
- How Automobile Clutches Work - Transmitting Power from Engine to WheelsDocument3 pagesHow Automobile Clutches Work - Transmitting Power from Engine to WheelsAshok Pradhan100% (1)
- Ae Unit 2Document25 pagesAe Unit 2Iyyappan SivalingamNo ratings yet
- Aman Cad CamDocument16 pagesAman Cad CamAmanuel tadiwosNo ratings yet
- Automobile ClutchDocument4 pagesAutomobile Clutchearnonline2023businessNo ratings yet
- The Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementFrom EverandThe Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementNo ratings yet
- Plymouth and Chrysler-built cars Complete Owner's Handbook of Repair and MaintenanceFrom EverandPlymouth and Chrysler-built cars Complete Owner's Handbook of Repair and MaintenanceNo ratings yet
- General Introduction Introduction of Composites: Historical Development / Historical Overview: PastDocument514 pagesGeneral Introduction Introduction of Composites: Historical Development / Historical Overview: PastMuthuvel MNo ratings yet
- COADocument137 pagesCOAThonta DariNo ratings yet
- Acu PressureDocument26 pagesAcu PressureMuthuvel M100% (4)
- Integration and Automation of Manufacturing SystemsDocument593 pagesIntegration and Automation of Manufacturing SystemsAlejo LalvayNo ratings yet
- Unit-3-Computer Aided DesignDocument21 pagesUnit-3-Computer Aided DesignMuthuvel M100% (5)
- Unit-4-Computer Aided DesignDocument15 pagesUnit-4-Computer Aided DesignMuthuvel M100% (2)
- Computer Aided Manufacturing-UNIT-2Document20 pagesComputer Aided Manufacturing-UNIT-2Muthuvel M100% (4)
- Unit-2-Computer Aided DesignDocument42 pagesUnit-2-Computer Aided DesignMuthuvel M80% (5)
- Unit 2 MetrologyDocument32 pagesUnit 2 MetrologyMuthuvel M83% (6)
- Unit 4 MetrologyDocument12 pagesUnit 4 MetrologyMuthuvel M89% (9)
- Radams ' 09Document370 pagesRadams ' 09Muthuvel M100% (1)
- Unit 3 MetrologyDocument38 pagesUnit 3 MetrologyMuthuvel M92% (36)
- Unit 5 MetrologyDocument16 pagesUnit 5 MetrologyMuthuvel M100% (2)
- Unit 1 CadDocument29 pagesUnit 1 CadMuthuvel M82% (17)
- Unit 1 Metro LogyDocument9 pagesUnit 1 Metro LogyMuthuvel M100% (1)
- UNIT 4 MechatronicsDocument21 pagesUNIT 4 MechatronicsMuthuvel M100% (1)
- Unit 5 Me1203Document25 pagesUnit 5 Me1203Muthuvel M100% (1)
- Unit 3 Me1203Document25 pagesUnit 3 Me1203Muthuvel MNo ratings yet
- UNIT 2 MechatronicsDocument35 pagesUNIT 2 MechatronicsMuthuvel M91% (11)
- UNIT 1 MechatronicsDocument15 pagesUNIT 1 MechatronicsMuthuvel M82% (17)
- Unit 5 MTDocument17 pagesUnit 5 MTMuthuvel MNo ratings yet
- Te Unit 4Document19 pagesTe Unit 4Muthuvel M100% (1)
- Te Unit 3Document29 pagesTe Unit 3Muthuvel M100% (1)
- UNIT 3 MechatronicsDocument38 pagesUNIT 3 MechatronicsMuthuvel M67% (6)
- UNIT 5 MechatronicsDocument16 pagesUNIT 5 MechatronicsMuthuvel M85% (27)
- Te Unit 1Document20 pagesTe Unit 1Muthuvel MNo ratings yet
- Unit 2 Me1203Document20 pagesUnit 2 Me1203Muthuvel MNo ratings yet
- Unit 1 Me1203Document17 pagesUnit 1 Me1203Muthuvel M100% (1)
- Te Unit 2Document22 pagesTe Unit 2krishnansriNo ratings yet
- Unit 4 Me1203Document26 pagesUnit 4 Me1203Muthuvel MNo ratings yet
- Boletim Jtco 506Document8 pagesBoletim Jtco 506Tamires TavaresNo ratings yet
- KTM DUKE 200 Spare Parts Manual EngineDocument28 pagesKTM DUKE 200 Spare Parts Manual EngineHarpreet Sethi100% (2)
- 2005-All-Enduro-Models Part ListDocument208 pages2005-All-Enduro-Models Part ListMikel FernandezNo ratings yet
- M2CP BrochureDocument16 pagesM2CP BrochureRenato Nato AlvarezNo ratings yet
- Allison+gen 5+fault+code+retrievalDocument22 pagesAllison+gen 5+fault+code+retrievalClaudio Acevedo JeriaNo ratings yet
- JD2030 Manual PDFDocument78 pagesJD2030 Manual PDFNemanjaKovacevicNo ratings yet
- Electronic System Fault Code GuideDocument55 pagesElectronic System Fault Code GuideJózsef JuhászNo ratings yet
- Dumper Komatsu HD465Document20 pagesDumper Komatsu HD465JesusFloresRodriguezNo ratings yet
- Construction Lube Apps 18 Jan 16Document46 pagesConstruction Lube Apps 18 Jan 16José Cesário NetoNo ratings yet
- Vehicle Specification Parameters for First Year Engineering (DITDocument21 pagesVehicle Specification Parameters for First Year Engineering (DITTejas Katkar93% (14)
- Main Components of Transmission SystemDocument11 pagesMain Components of Transmission SystemVJ CarbonellNo ratings yet
- BackstopsDocument8 pagesBackstopsfarchipmm58No ratings yet
- PCT 2706113Document12 pagesPCT 2706113Anonymous VNu3ODGavNo ratings yet
- Kioti Daedong DK4520-EU, DK5020-EU, DK6020-EU Tractors Service Manual WM201231Document19 pagesKioti Daedong DK4520-EU, DK5020-EU, DK6020-EU Tractors Service Manual WM201231LisakolyNo ratings yet
- PB162 R3 Recovery Winch Service 4-2010Document40 pagesPB162 R3 Recovery Winch Service 4-2010fede444No ratings yet
- Fiat Allis 605b Wheel Loader Parts Catalog 16f17407Document20 pagesFiat Allis 605b Wheel Loader Parts Catalog 16f17407jacob100% (44)
- Omo AwuDocument166 pagesOmo AwuOmo AwuNo ratings yet
- Horton Klondike k26 Installation and Repair Kit InstructionsDocument18 pagesHorton Klondike k26 Installation and Repair Kit InstructionsGuillermo Gerardo Sanchez PonceNo ratings yet
- 2005 Polaris 600 XC SP SNOWMOBILE Service Repair Manual PDFDocument49 pages2005 Polaris 600 XC SP SNOWMOBILE Service Repair Manual PDFhfjskemmdm0% (1)
- ZF 2500 Series Marine Transmission Operating InstructionsDocument8 pagesZF 2500 Series Marine Transmission Operating Instructionsfrank98% (47)
- ReviewerDocument7 pagesReviewerAriel Mark Pilotin100% (3)
- Dynamics of Machinery 4Document2 pagesDynamics of Machinery 4prasaad08No ratings yet
- TL 103029Document16 pagesTL 103029CarlosNo ratings yet
- LM1445-1745 Anz3501ncgbDocument16 pagesLM1445-1745 Anz3501ncgbSergioNo ratings yet
- ROPER12HPLAWNTRACTORLT120CROWNERSMANUALDocument52 pagesROPER12HPLAWNTRACTORLT120CROWNERSMANUALAardvarkthefirst92% (12)
- Atb 935Document5 pagesAtb 935Raul Rodriguez JuarezNo ratings yet
- 1971 Chevy Overhaul ManualDocument505 pages1971 Chevy Overhaul ManualCharlie Moretti100% (1)
- Manual de Caja ToyotaDocument13 pagesManual de Caja ToyotaIsai MixiaNo ratings yet
- 2013 KTM 250-300 SX-XC Service Repair Manual PDFDocument277 pages2013 KTM 250-300 SX-XC Service Repair Manual PDFHelmut MartinezNo ratings yet
- RC Truggy V2: By: 3dimensionsDocument21 pagesRC Truggy V2: By: 3dimensionsAlisson Barreto de AbreuNo ratings yet