You might also like
- Diseño Con Sensores y ActuadoresDocument7 pagesDiseño Con Sensores y ActuadoresGadiel Armijos VNo ratings yet
- Aritmética Práctica 1°selección Semana-08Document2 pagesAritmética Práctica 1°selección Semana-08Mervyn Loza Chilquillo100% (1)
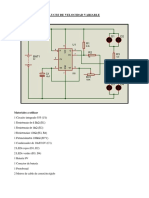
- Luces de Velocidad VariableDocument2 pagesLuces de Velocidad VariablejavichocixNo ratings yet
- Proyecto - Fuente de Poder de 12V para 3aDocument14 pagesProyecto - Fuente de Poder de 12V para 3aluis piscoyaNo ratings yet
- Linea Tecnica Plantec PDFDocument8 pagesLinea Tecnica Plantec PDFAgustin FranchettiNo ratings yet
- Sensor de Temperatura PDFDocument16 pagesSensor de Temperatura PDFJuan Luis Uribe ArellanoNo ratings yet
- Respuesta XDDocument2 pagesRespuesta XDOdalys Masapanta50% (2)
- Laboratorio No.3 Modelado y Simulación 2021Document2 pagesLaboratorio No.3 Modelado y Simulación 2021bhebwhefbhwebhNo ratings yet
- Taller 2 HemisemestreDocument3 pagesTaller 2 HemisemestreMaryin Paulina Bailon ArcentalesNo ratings yet
- Clase 18 - Dibujo Mecánico Roscas y RemachesDocument78 pagesClase 18 - Dibujo Mecánico Roscas y RemachesKev AcuñaNo ratings yet
- Patrones y calibres para medición de longitudesDocument4 pagesPatrones y calibres para medición de longitudesMatheo Moreno100% (1)
- Evolución del Dibujo TécnicoDocument6 pagesEvolución del Dibujo TécnicoReynaldo Andre RamirezNo ratings yet
- DISEnOMECaNICOFABRICACIN PDFDocument13 pagesDISEnOMECaNICOFABRICACIN PDFadrianNo ratings yet
- Fabricacion de Una Placa PBCDocument16 pagesFabricacion de Una Placa PBCirisson007100% (1)
- Qué Es Un Transformador y para Qué SirveDocument1 pageQué Es Un Transformador y para Qué SirveJosue Moran75% (4)
- Normalizacion - Tema 2-Dibujo Industrial PDFDocument51 pagesNormalizacion - Tema 2-Dibujo Industrial PDFmmorebal93975% (4)
- SÍLABO FÍSICA Oct.2022 - Feb2023Document12 pagesSÍLABO FÍSICA Oct.2022 - Feb2023Cesaro LoquendoNo ratings yet
- Como Construir Un Robot ArañaDocument20 pagesComo Construir Un Robot ArañaAlfred Maza QuiñonesNo ratings yet
- Filtros Pasa Altos ActivoDocument11 pagesFiltros Pasa Altos ActivoFercho EspinosaNo ratings yet
- 02 Presentación Sustentacion de Tesis PDFDocument130 pages02 Presentación Sustentacion de Tesis PDFguillermoNo ratings yet
- Ensayo Datasheet PIC 16F877Document5 pagesEnsayo Datasheet PIC 16F877Santiago CorreaNo ratings yet
- Eac Manual PDFDocument53 pagesEac Manual PDFMartin ReyesNo ratings yet
- UnionesDocument12 pagesUnionesRené FierroNo ratings yet
- Características de Los TornillosDocument11 pagesCaracterísticas de Los TornillosLizbetZoraidaTurpoBurgosNo ratings yet
- Curso de Carpinteria Tema 1 A 5 PDFDocument79 pagesCurso de Carpinteria Tema 1 A 5 PDFIng José David Cab AyalaNo ratings yet
- Simbologias Por Arco Electrico y OxiacetilenoDocument14 pagesSimbologias Por Arco Electrico y OxiacetilenoJosué Medína Ramírez100% (1)
- Fundamentos de Dibujo TecnicoDocument6 pagesFundamentos de Dibujo TecnicoJulian Hernando Mendoza ChaconNo ratings yet
- Bobinas: Antecedentes, materiales, cálculo del campo magnético y construcción de inductoresDocument7 pagesBobinas: Antecedentes, materiales, cálculo del campo magnético y construcción de inductoresAnneRNo ratings yet
- DISEÑO DE UN INDUCTOR RECTILÍNEODocument8 pagesDISEÑO DE UN INDUCTOR RECTILÍNEOLIMBERTOLEDO100% (1)
- Robotica sencilla desde ceroDocument26 pagesRobotica sencilla desde ceroOscar Carcamo100% (1)
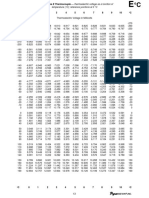
- Termopares Tipo E Tabla Tensión en Funcion de TemperaturaDocument3 pagesTermopares Tipo E Tabla Tensión en Funcion de TemperaturaGilberto Andrés JuradoNo ratings yet
- Laboratorio 1 Elt3880-1-2019Document4 pagesLaboratorio 1 Elt3880-1-2019Abigail CoraiteNo ratings yet
- Electricidad-Herramientas para InstalacionesDocument37 pagesElectricidad-Herramientas para InstalacionesneomannextmanNo ratings yet
- Sistema de tolerancias dimensionales: Investigación sobre conceptos, representación y posición de la zona de toleranciaDocument13 pagesSistema de tolerancias dimensionales: Investigación sobre conceptos, representación y posición de la zona de toleranciaJONATHAN EZEQUIEL PINARGOTE CHALLANo ratings yet
- NTC1831Document36 pagesNTC1831Cristian J. MejíaNo ratings yet
- Diseño E Implementación de Un Lavado Y Secado de Manos AutomatizadoDocument11 pagesDiseño E Implementación de Un Lavado Y Secado de Manos AutomatizadoAldo LariosNo ratings yet
- Derivada en MotoresDocument9 pagesDerivada en MotoresSergio YepezNo ratings yet
- Tarea Convertidores Ca-CaDocument16 pagesTarea Convertidores Ca-CaAndres Rilop100% (1)
- Capitulo 5 - Admitancia en Derivacion Lineas Aereas y SubterraneasDocument15 pagesCapitulo 5 - Admitancia en Derivacion Lineas Aereas y SubterraneasBrenda Naranjo MorenoNo ratings yet
- Herramienta y UtillajeDocument20 pagesHerramienta y UtillajeBenjamin Sanchez100% (1)
- ES1 2023 Estudio de CasoDocument2 pagesES1 2023 Estudio de CasoJoaquin Robles HermosillaNo ratings yet
- INVESTIGACION Maquina HerramientaDocument5 pagesINVESTIGACION Maquina HerramientaYulianethNo ratings yet
- Tipos de Uniones MecanicasDocument13 pagesTipos de Uniones MecanicasJuan Carlos MolinaNo ratings yet
- Reporte de Practica #1Document8 pagesReporte de Practica #1Ochoa JoshuaNo ratings yet
- Capacitacion Pantografo CNCDocument14 pagesCapacitacion Pantografo CNCGonzalo CardozoNo ratings yet
- WTC 140Document1 pageWTC 140Cv JjNo ratings yet
- Informe Práctica 1 Grupo 2Document10 pagesInforme Práctica 1 Grupo 2Samuel VillamilNo ratings yet
- Tubo de Rayos CatodicosDocument18 pagesTubo de Rayos CatodicosVladimir Quispe OrihuelaNo ratings yet
- Ajuste MecanicoDocument8 pagesAjuste Mecaniconelson100% (2)
- Principios de Programacion RoboticaDocument7 pagesPrincipios de Programacion RoboticaMariano Ënriquë Dë JësusNo ratings yet
- Trazado y AcerradoDocument15 pagesTrazado y AcerradoJesusForeroNo ratings yet
- Luces AudioritmicasDocument5 pagesLuces Audioritmicasilm86No ratings yet
- Reporte Del Puente HDocument3 pagesReporte Del Puente HManuel DSaarabio100% (1)
- Anexo 02-Requisitos para Planos en AutocadDocument2 pagesAnexo 02-Requisitos para Planos en AutocadmagnificatNo ratings yet
- Funciones de ArduinoDocument2 pagesFunciones de ArduinoCRISTHIAN CAMILO MONROY UNIVIONo ratings yet
- Control Numérico Computarizado: Fundamentos y Aplicaciones en Máquinas CNCDocument45 pagesControl Numérico Computarizado: Fundamentos y Aplicaciones en Máquinas CNCCharly CastañedaNo ratings yet
- Diseño y Construcción de Un Robot Seguidor de LíneaDocument8 pagesDiseño y Construcción de Un Robot Seguidor de LíneaDeyvis Gonzales Guevara0% (1)
- Carrito Seguidor de Línea NegraDocument8 pagesCarrito Seguidor de Línea NegraSergio RamosNo ratings yet
- Robot Seguidor de LíneasDocument6 pagesRobot Seguidor de LíneasCristian Andres Forero RicoNo ratings yet
- 01apuntes SiguelineasDocument11 pages01apuntes SiguelineasSDanielTorresPachasNo ratings yet
- Curriculum VitaeDocument11 pagesCurriculum VitaeJacksito GuevaraNo ratings yet
- Alejandro Luis OtazoDocument1 pageAlejandro Luis OtazoJacksito GuevaraNo ratings yet
- Sueño de una noche de veranoDocument2 pagesSueño de una noche de veranoJacksito GuevaraNo ratings yet
- PLanta de Cacao Plan LectorDocument3 pagesPLanta de Cacao Plan LectorJacksito GuevaraNo ratings yet
- Recurso QuejaDocument3 pagesRecurso QuejaJacksito GuevaraNo ratings yet
- Triptico MathiasDocument2 pagesTriptico MathiasJacksito Guevara75% (8)
- Constitucion Politica Del PeruDocument6 pagesConstitucion Politica Del PeruJacksito GuevaraNo ratings yet
- CONSOLIDACIÓNDocument2 pagesCONSOLIDACIÓNJacksito GuevaraNo ratings yet
- CV JhonyDocument2 pagesCV JhonyJacksito GuevaraNo ratings yet
- Isonitrilos: propiedades y nomenclatura de los grupos isocianatosDocument2 pagesIsonitrilos: propiedades y nomenclatura de los grupos isocianatosJacksito GuevaraNo ratings yet
- Economía de La Cultura NazcaDocument3 pagesEconomía de La Cultura NazcaJacksito Guevara90% (10)
- Economía de La Cultura NazcaDocument3 pagesEconomía de La Cultura NazcaJacksito Guevara90% (10)
- El Caballero de Los MaresDocument2 pagesEl Caballero de Los MaresJacksito GuevaraNo ratings yet
- Recurso QuejaDocument3 pagesRecurso QuejaJacksito GuevaraNo ratings yet
- PreguntasDocument8 pagesPreguntasJacksito GuevaraNo ratings yet
- Barra de MenúDocument1 pageBarra de MenúJacksito GuevaraNo ratings yet
- StuardDocument2 pagesStuardJacksito GuevaraNo ratings yet
- Himno de CallaoDocument2 pagesHimno de CallaoJacksito Guevara50% (2)
- Fernando Zapata LalupuDocument6 pagesFernando Zapata LalupuJacksito GuevaraNo ratings yet
- Declaracion Juarada PDFDocument1 pageDeclaracion Juarada PDFJacksito GuevaraNo ratings yet
- Circuito ElectricoDocument4 pagesCircuito ElectricoJacksito GuevaraNo ratings yet
- Tema PrincipalDocument1 pageTema PrincipalJacksito GuevaraNo ratings yet
- StuardDocument2 pagesStuardJacksito GuevaraNo ratings yet
- Carlos FuentesDocument1 pageCarlos FuentesJacksito GuevaraNo ratings yet
- Declaracion Juarada PDFDocument1 pageDeclaracion Juarada PDFJacksito GuevaraNo ratings yet
- WQWDocument5 pagesWQWJacksito GuevaraNo ratings yet
- Tema PrincipalDocument1 pageTema PrincipalJacksito GuevaraNo ratings yet
- COTIZACIÓNDocument9 pagesCOTIZACIÓNJacksito GuevaraNo ratings yet
- Reciclaje y Destruccion CardenasDocument1 pageReciclaje y Destruccion CardenasJacksito GuevaraNo ratings yet
- Declaracion JuaradaDocument1 pageDeclaracion JuaradaJacksito GuevaraNo ratings yet
- AUTOESTUDIO RealizadoDocument15 pagesAUTOESTUDIO RealizadoJosé CanahuireNo ratings yet
- Tipos de Amplificadores XDDocument2 pagesTipos de Amplificadores XDCastro Fernando QuispeNo ratings yet
- Parametros HDocument15 pagesParametros Hmarioaladro1No ratings yet
- Manual Practico de Averias en TV Blanco y NegroDocument87 pagesManual Practico de Averias en TV Blanco y NegroАренас Джоунс ОливерNo ratings yet
- Investigacion Circuitos Electronicos y OsciladoresDocument14 pagesInvestigacion Circuitos Electronicos y OsciladoresIvan SalazarNo ratings yet
- Puente H BJTDocument5 pagesPuente H BJTCesar Julio Hincapie FrancoNo ratings yet
- Electricidad Vehicular 01Document156 pagesElectricidad Vehicular 01Ruben Castro Quispe71% (7)
- INFORME LAB 6, Diseño Del Circuito de Control de Fase de Un TRIAC Utilizando Un Oscilador de Relajación Con UJT o PUTDocument10 pagesINFORME LAB 6, Diseño Del Circuito de Control de Fase de Un TRIAC Utilizando Un Oscilador de Relajación Con UJT o PUTMarioF.ParadaNo ratings yet
- Efectos de FrecuenciaDocument23 pagesEfectos de FrecuenciaandresNo ratings yet
- Amplificadores Con Transistores BJTDocument4 pagesAmplificadores Con Transistores BJTOscarNo ratings yet
- Fundamentos de Transistores 3Document45 pagesFundamentos de Transistores 3Ariana Garcia uwuNo ratings yet
- Prueba de Flyback en 8 LEDsDocument12 pagesPrueba de Flyback en 8 LEDsMarianaValen ChNo ratings yet
- DiodosDocument43 pagesDiodosIvan LitumaNo ratings yet
- Transistor de Inducción EstáticaDocument3 pagesTransistor de Inducción Estáticakarlangaz100% (1)
- TRUCOS Con InvertersDocument6 pagesTRUCOS Con InvertersKevin GaineNo ratings yet
- Sístema de Control de Un Motor Eléctrico de Corriente DirectaDocument3 pagesSístema de Control de Un Motor Eléctrico de Corriente DirectaandysolorockNo ratings yet
- Robot Seguidor de Lineas y BrazoDocument17 pagesRobot Seguidor de Lineas y BrazoMike MoralesNo ratings yet
- Seminario 1 28 de NoviembreDocument16 pagesSeminario 1 28 de Noviembrealirio mendezNo ratings yet
- Practica 4 Eanalogica JCTBDocument4 pagesPractica 4 Eanalogica JCTBJuan Carlos Pato TellezNo ratings yet
- Casos de Éxito de Patentes Que Se Convirtieron en Negocio (Tanto de Mexicanos Como de Extranjeros)Document7 pagesCasos de Éxito de Patentes Que Se Convirtieron en Negocio (Tanto de Mexicanos Como de Extranjeros)Jose Martin Alvarado HerreraNo ratings yet
- ResistoresDocument44 pagesResistoresjorgeyuniNo ratings yet
- Diodo Transistor OpamDocument192 pagesDiodo Transistor OpamCriz MauricioNo ratings yet
- Unidad 6 TrabajoDocument32 pagesUnidad 6 TrabajozulyNo ratings yet
- LABORATORIO 02 Amp DiferencialDocument6 pagesLABORATORIO 02 Amp DiferencialFlavio AndreéNo ratings yet
- Adc ConversorDocument8 pagesAdc ConversorJhonny MoyonNo ratings yet
- Transistor EsDocument4 pagesTransistor EsDiegoAsquiNo ratings yet
- Circuito de SemaforoDocument8 pagesCircuito de Semaforoguallala oliveraNo ratings yet
- Compuertas Practica 01 PDFDocument17 pagesCompuertas Practica 01 PDFWilson TarrifaNo ratings yet
- Transistor Bipolar NPNDocument10 pagesTransistor Bipolar NPNkevinNo ratings yet