You might also like
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Document27 pagesSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNo ratings yet
- Rectifier PaperDocument19 pagesRectifier PaperMohamad SyazwanNo ratings yet
- L12 Single Phase Uncontrolled RectifierDocument22 pagesL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- Muhd Halalluddin Bin Abdul Rahim 1Document40 pagesMuhd Halalluddin Bin Abdul Rahim 1Mohamad SyazwanNo ratings yet
- RectifiersDocument28 pagesRectifiersMohamad SyazwanNo ratings yet
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Document27 pagesSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNo ratings yet
- Lecture 7Document33 pagesLecture 7Mohamad SyazwanNo ratings yet
- Experiment 5 Lab Report Uitm Malaysian CollegeDocument16 pagesExperiment 5 Lab Report Uitm Malaysian CollegeFaris Muhammad0% (1)
- CH4Document55 pagesCH4Mohamad SyazwanNo ratings yet
- Tutorial 5Document2 pagesTutorial 5Mohamad SyazwanNo ratings yet
- EE 410 Lab1 Fall10-1305411901Document27 pagesEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNo ratings yet
- c2Document29 pagesc2Mohamad SyazwanNo ratings yet
- Controller Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Document27 pagesController Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Mohamad SyazwanNo ratings yet
- Tutorial 3Document2 pagesTutorial 3Mohamad SyazwanNo ratings yet
- Common Forms of BusinessDocument22 pagesCommon Forms of BusinessPanda DutchNo ratings yet
- Tutorial 4Document1 pageTutorial 4Mohamad SyazwanNo ratings yet
- Tutorial 1Document2 pagesTutorial 1Mohamad SyazwanNo ratings yet
- Guide 1Document2 pagesGuide 1Saithila ThilaNo ratings yet
- Chapter Four: 4.1 Project GoalDocument5 pagesChapter Four: 4.1 Project GoalMohamad SyazwanNo ratings yet
- Tutorial 2Document1 pageTutorial 2Mohamad SyazwanNo ratings yet
- Fresh GraduateDocument2 pagesFresh GraduateArin MuhammadNo ratings yet
- EntrepreneurshipDocument83 pagesEntrepreneurshipRakeshh Bansi TalrejaNo ratings yet
- Entrepreneurship Studies Chapter 1 1232804769353991 2Document26 pagesEntrepreneurship Studies Chapter 1 1232804769353991 2fast nuNo ratings yet
- Lego Mindstorms Segway Project Report2Document8 pagesLego Mindstorms Segway Project Report2Mohamad SyazwanNo ratings yet
- Smart House: Suggested TimeDocument3 pagesSmart House: Suggested TimeMohamad SyazwanNo ratings yet
- MachineDocument23 pagesMachineMohamad SyazwanNo ratings yet
- DEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringDocument3 pagesDEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringMohamad SyazwanNo ratings yet
- Assignment2 Solution 3rd EditionDocument4 pagesAssignment2 Solution 3rd EditionMohamad SyazwanNo ratings yet
- Zener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Document5 pagesZener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Mohamad SyazwanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Experiment 4 Report TemplateDocument3 pagesExperiment 4 Report TemplateArwin Dela CruzNo ratings yet
- MBQ 50 T 65 FDSCDocument10 pagesMBQ 50 T 65 FDSCisaiasvaNo ratings yet
- Nota Kuliah 4 (Measurement and Instumentation)Document13 pagesNota Kuliah 4 (Measurement and Instumentation)Azizah Mat YusofNo ratings yet
- Skin Effect and Dielectric Loss Models of Power Cables 04784562Document8 pagesSkin Effect and Dielectric Loss Models of Power Cables 04784562Gilberto Mejía100% (1)
- Pe Lab 8-200708Document21 pagesPe Lab 8-200708Omar JanjuaNo ratings yet
- 1N4148 Diode: The Transfer Characteristic of The Diode: Current vs. VoltageDocument5 pages1N4148 Diode: The Transfer Characteristic of The Diode: Current vs. VoltageTomina FabiolaNo ratings yet
- Quantum SMR3000W SpecsDocument6 pagesQuantum SMR3000W Specsihsanju100% (1)
- 33KV 433V 3.6mvaDocument15 pages33KV 433V 3.6mvaABINASH SATAPATHYNo ratings yet
- EMC Filter Design With RB Common Mode ChokesDocument22 pagesEMC Filter Design With RB Common Mode Chokeskaem1189No ratings yet
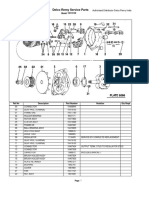
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDocument2 pagesDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaNo ratings yet
- Design and Research On The LCL Filter in Three-Phase PV PDFDocument4 pagesDesign and Research On The LCL Filter in Three-Phase PV PDFMohammad Mahad NadeemNo ratings yet
- 978 1 61209 976 7 - ch1Document73 pages978 1 61209 976 7 - ch1Petar SimicNo ratings yet
- AN004-Design of 20-kW Resonant LLC Converter For DC-DC Power SupplyDocument11 pagesAN004-Design of 20-kW Resonant LLC Converter For DC-DC Power SupplyRudhi KurniawanNo ratings yet
- PW ElecDocument5 pagesPW ElecKarajRoboNo ratings yet
- Lecture 2 DC To Ac InverterDocument50 pagesLecture 2 DC To Ac InverterMohamed AhmedNo ratings yet
- 6 NOSS Matrix Home Grown Level 1&2Document14 pages6 NOSS Matrix Home Grown Level 1&2zamriabdNo ratings yet
- Chapter 1. Introduction Understanding Power System HarmonicsDocument2 pagesChapter 1. Introduction Understanding Power System HarmonicsKish KhiradkNo ratings yet
- 3 SynchroTeq Plus DatasheetDocument42 pages3 SynchroTeq Plus DatasheetGiven AlexanderNo ratings yet
- TechnicalArticle SolarDocument191 pagesTechnicalArticle SolaragilsonlibreNo ratings yet
- Volvo Way To Electrification Tech Talk PDFDocument65 pagesVolvo Way To Electrification Tech Talk PDFcarbasemy100% (6)
- RectifiersDocument27 pagesRectifiersMeral MeralNo ratings yet
- Power SystemsDocument87 pagesPower SystemsSreevas AredathNo ratings yet
- 1.R, RC, UJT FiringDocument34 pages1.R, RC, UJT Firingmanoj0% (1)
- Experiment No. 1: DIFFERENT TYPES OF Uninterruptible Power Supply (UPS) Systems ObjectiveDocument2 pagesExperiment No. 1: DIFFERENT TYPES OF Uninterruptible Power Supply (UPS) Systems ObjectiveMichael Calizo PacisNo ratings yet
- S10 StandardsReport PDFDocument24 pagesS10 StandardsReport PDFDante FilhoNo ratings yet
- Multisim ExercisesDocument4 pagesMultisim ExercisesNoor HassanNo ratings yet
- Analog Ac DC and Isolated DC DC Solutions For Automotive Hev Ev Applications Det Tech Day 9-10-18 Mo BDocument52 pagesAnalog Ac DC and Isolated DC DC Solutions For Automotive Hev Ev Applications Det Tech Day 9-10-18 Mo BSROTRIYA TRIPATHI100% (1)
- Icrtmse 2023 Book of AbstractsDocument154 pagesIcrtmse 2023 Book of AbstractsMeghanand BhamareNo ratings yet
- T C 2014 Ieee S Vlsi T: Able of Ontents Ymposium On EchnologyDocument44 pagesT C 2014 Ieee S Vlsi T: Able of Ontents Ymposium On EchnologyRock BabluNo ratings yet
- Bridge Rectifiers 2.0 To 8.0 Amps: This Datasheet Has Been Downloaded From at ThisDocument1 pageBridge Rectifiers 2.0 To 8.0 Amps: This Datasheet Has Been Downloaded From at ThisM SayyafNo ratings yet