You might also like
- Análise de Causa RaizDocument32 pagesAnálise de Causa Raizjulio_pastoreNo ratings yet
- Aula 1 - Introdução A Estradas de Rodagem e Projeto GeométricoDocument51 pagesAula 1 - Introdução A Estradas de Rodagem e Projeto GeométricoFabrício GuimarãesNo ratings yet
- PPR - DelineadoresDocument1 pagePPR - DelineadoresleticiaNo ratings yet
- Método para Bateria Por Daniel BateraDocument31 pagesMétodo para Bateria Por Daniel BateraDaniel SilvaNo ratings yet
- Exercicios Funcoes OrganicasDocument2 pagesExercicios Funcoes OrganicasKrsna Murari67% (3)
- Densimetria de Materiais GranuladoDocument5 pagesDensimetria de Materiais GranuladoGirlane SantosNo ratings yet
- QG Exercã Cios - EstequiometriaDocument20 pagesQG Exercã Cios - EstequiometriaToni FariasNo ratings yet
- Manual Sistema DGPark WEB Rev1 PDFDocument10 pagesManual Sistema DGPark WEB Rev1 PDFDomParking MinhaVagaNo ratings yet
- Colaborar - Av1 - Linguagem Orientada A ObjetosDocument3 pagesColaborar - Av1 - Linguagem Orientada A Objetoselyasmin007No ratings yet
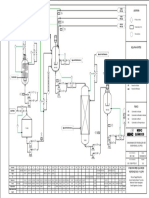
- PFD BPA Final-Páginas-1Document1 pagePFD BPA Final-Páginas-1Luiz Rodrigo AssisNo ratings yet
- Aula 5 - Teoria Da ComputaçãoDocument12 pagesAula 5 - Teoria Da ComputaçãoCristianeNo ratings yet
- 4 ATIVIDADE 1º ANO - Matematica. 4º Periodo - Prof. JOACYDocument3 pages4 ATIVIDADE 1º ANO - Matematica. 4º Periodo - Prof. JOACYGustavo AssunçãoNo ratings yet
- Filipetas Onduline Clássica FITDocument2 pagesFilipetas Onduline Clássica FIT1otoNo ratings yet
- Manual Fresamento NX8Document62 pagesManual Fresamento NX8abelmil123No ratings yet
- Quest 07 - Revisão - GabDocument8 pagesQuest 07 - Revisão - GabmisaelinacioNo ratings yet
- Ap Matemática 6 Série EfDocument304 pagesAp Matemática 6 Série EfAlexandre MarianoNo ratings yet
- Instalação de (SWC) Chevrolet CapitivaDocument11 pagesInstalação de (SWC) Chevrolet CapitivaAndre LucieneNo ratings yet
- 1 Análise Crítica Da Filosofia de WittgensteinDocument2 pages1 Análise Crítica Da Filosofia de WittgensteinRoberto BragaNo ratings yet
- Ats2 PDFDocument12 pagesAts2 PDFUenis Pinto TavaresNo ratings yet
- Ficha de Trabalho - Tabela Periódica - 10º Ano QuímicaDocument6 pagesFicha de Trabalho - Tabela Periódica - 10º Ano QuímicaTeresa CaldeiraNo ratings yet
- 001 Manual Esteira Atheltic RunnerDocument8 pages001 Manual Esteira Atheltic RunnerLulii RisottoNo ratings yet
- Transformações Lineares - SlidesDocument20 pagesTransformações Lineares - SlidesFelipe BarbosaNo ratings yet
- 3 - Estática Dos Fluidos - 2Document29 pages3 - Estática Dos Fluidos - 2Eliziane LeonNo ratings yet
- Topicos de Informatica - Unip 2013Document48 pagesTopicos de Informatica - Unip 2013Emerson GuesaNo ratings yet
- 367891-Exercício PascalzimDocument4 pages367891-Exercício PascalzimDiego OliveiraNo ratings yet
- Automação e ControleDocument268 pagesAutomação e ControleWASHINGTONNo ratings yet
- Receitas - Clara de SousaDocument10 pagesReceitas - Clara de SousaAna AbreuNo ratings yet
- Lista de Trabalhos 4 - CiclonagemDocument3 pagesLista de Trabalhos 4 - CiclonagemLuana Macedo100% (1)
- Slides de Tecnologia Mecanica 17.07.18BDocument5 pagesSlides de Tecnologia Mecanica 17.07.18BAlfredo AlarNo ratings yet
- 2021 2022 01 Exp9 Teste1 Movimentos Na Terra Ae EstruturaDocument2 pages2021 2022 01 Exp9 Teste1 Movimentos Na Terra Ae EstruturaSandra FariaNo ratings yet