You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Nord B1000 Gear Units and Motors PDFDocument48 pagesNord B1000 Gear Units and Motors PDFdalbaasNo ratings yet
- Report Guidelines - How To Write A Tutorial Report For AMME 5202Document2 pagesReport Guidelines - How To Write A Tutorial Report For AMME 5202dalbaasNo ratings yet
- Energies 07 03282Document22 pagesEnergies 07 03282dalbaasNo ratings yet
- Selleys Kwik Grip Horizontal 240 G L Liquid Hydrocarbon - Aus GhsDocument9 pagesSelleys Kwik Grip Horizontal 240 G L Liquid Hydrocarbon - Aus GhsdalbaasNo ratings yet
- Grundfosliterature 3666021Document18 pagesGrundfosliterature 3666021dalbaasNo ratings yet
- Ltsb7-Lubrease Clear AerosolDocument13 pagesLtsb7-Lubrease Clear AerosoldalbaasNo ratings yet
- Sponsor LetterDocument1 pageSponsor LetterdalbaasNo ratings yet
- WorkoutDocument4 pagesWorkoutdalbaasNo ratings yet
- Gear Pump Standard Operating Manual and Instructions PDFDocument35 pagesGear Pump Standard Operating Manual and Instructions PDFdalbaasNo ratings yet
- 4610.0 - Water Account, Australia, 2015-16Document2 pages4610.0 - Water Account, Australia, 2015-16dalbaasNo ratings yet
- Incidentreportwriting PDFDocument2 pagesIncidentreportwriting PDFKingdom HeartsNo ratings yet
- PTE Essays With AnswersDocument15 pagesPTE Essays With Answersnarasimha93% (307)
- Grundfosliterature 3666021Document7 pagesGrundfosliterature 3666021Agustín Borbor LimónNo ratings yet
- Anthem Words AustraliaDocument1 pageAnthem Words AustralialamtamnhuNo ratings yet
- Tribuslingua ReducedDocument179 pagesTribuslingua ReducedmukundNo ratings yet
- How To Write A Resume For Internships, Co-Op Positions, Summer, or Part-Time JobsDocument23 pagesHow To Write A Resume For Internships, Co-Op Positions, Summer, or Part-Time JobsHarsha GowdaNo ratings yet
- How To Write A Resume For Internships, Co-Op Positions, Summer, or Part-Time JobsDocument23 pagesHow To Write A Resume For Internships, Co-Op Positions, Summer, or Part-Time JobsHarsha GowdaNo ratings yet
- Stage 1 Guide - Sept 2014Document21 pagesStage 1 Guide - Sept 2014KubilayNo ratings yet
- Mechatronics Foundational Technical SkillsDocument25 pagesMechatronics Foundational Technical SkillsdalbaasNo ratings yet
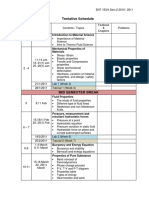
- ENT 153 Teaching PlanDocument2 pagesENT 153 Teaching PlandalbaasNo ratings yet
- Tribuslingua ReducedDocument179 pagesTribuslingua ReducedmukundNo ratings yet
- Tribuslingua ReducedDocument179 pagesTribuslingua ReducedmukundNo ratings yet
- Presentation On Halal and HaramDocument19 pagesPresentation On Halal and HaramFaizan ChNo ratings yet
- How To Write A Resume For Internships, Co-Op Positions, Summer, or Part-Time JobsDocument23 pagesHow To Write A Resume For Internships, Co-Op Positions, Summer, or Part-Time JobsHarsha GowdaNo ratings yet
- 1745A01 - 0511F34 Research Assistant (Nickel Electrowinning)Document3 pages1745A01 - 0511F34 Research Assistant (Nickel Electrowinning)dalbaasNo ratings yet
- Collocations: Student Learning SupportDocument3 pagesCollocations: Student Learning SupportShaikh Hafizur RahmanNo ratings yet
- Important VocabsDocument4 pagesImportant VocabsdalbaasNo ratings yet
- Skilled Migration Criteria 2013-2014Document4 pagesSkilled Migration Criteria 2013-2014Avijit DasNo ratings yet
- 9 Words To Help You PTEDocument3 pages9 Words To Help You PTEdalbaas80% (5)
- Resume Template-StandardDocument3 pagesResume Template-StandardzxcvbnicoleNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Gain V1.00-E.Document178 pagesGain V1.00-E.Mitko VirliosNo ratings yet
- Commander SE Product DataDocument23 pagesCommander SE Product Dataramon navaNo ratings yet
- Operation and Supply ChainDocument34 pagesOperation and Supply ChainAqib LatifNo ratings yet
- Fan Uc Manuals 1791Document322 pagesFan Uc Manuals 1791Vlad Leucuta100% (3)
- dl150 Rev2Document450 pagesdl150 Rev2Eleonor CamargoNo ratings yet
- Load CalculationDocument4 pagesLoad CalculationAbdul AlimNo ratings yet
- Kinetix 300 SelectionguideDocument20 pagesKinetix 300 SelectionguideIndusistronic ArequipaNo ratings yet
- URIT-660 Service Manual PDFDocument15 pagesURIT-660 Service Manual PDFCharlys RajaobelinaNo ratings yet
- User Manual 22mt44dp-pzDocument36 pagesUser Manual 22mt44dp-pzVideoHi VizanteaNo ratings yet
- Electronic Circuit AnalysisDocument7 pagesElectronic Circuit AnalysisIshansi AgrawalNo ratings yet
- Semiconductor QBDocument9 pagesSemiconductor QBdheeraj rajNo ratings yet
- Slide On Line CodingDocument43 pagesSlide On Line CodingShahin AhmedNo ratings yet
- 13.a1701 OmDocument12 pages13.a1701 Ommohd arif fahmi mohamad salehNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document39 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Andy Sanchez GamarraNo ratings yet
- SAGEM Link F User GuideDocument123 pagesSAGEM Link F User Guidemsplm28100% (2)
- Measuring Planck's Constant Using The Photoelectric Effect Purpose: TheoryDocument3 pagesMeasuring Planck's Constant Using The Photoelectric Effect Purpose: TheoryAmrit NumanNo ratings yet
- DS-7200HUHI-K1 SERIES Turbo HD DVR: Key FeatureDocument4 pagesDS-7200HUHI-K1 SERIES Turbo HD DVR: Key FeatureRadu GălățanNo ratings yet
- A Bridgeless Single-Stage Half-Bridge AC DC ConverterDocument12 pagesA Bridgeless Single-Stage Half-Bridge AC DC ConverterSaravana Prakash PNo ratings yet
- Best Energy Management: For HVACDocument10 pagesBest Energy Management: For HVACMarc Emil CasilaoNo ratings yet
- Omni Lifenet SpecsDocument2 pagesOmni Lifenet SpecsAngel JuarezNo ratings yet
- 710AA90L7BV-EMD26CLT 59w (LBP) - DatasheetDocument5 pages710AA90L7BV-EMD26CLT 59w (LBP) - Datasheetmohamad tajvidiNo ratings yet
- Demand Factor-Diversity Factor-Utilization Factor-Load FactorDocument13 pagesDemand Factor-Diversity Factor-Utilization Factor-Load FactorYousif_Abdalhalim100% (1)
- HT 306PD (sm-AFN75354522)Document65 pagesHT 306PD (sm-AFN75354522)Roberd MihailovNo ratings yet
- M9 / M9D M11 / M11D: No Longer in PR Oduction Some Ser Vice Par Ts Ma y Not Bea Vailab Lef or This Product!Document128 pagesM9 / M9D M11 / M11D: No Longer in PR Oduction Some Ser Vice Par Ts Ma y Not Bea Vailab Lef or This Product!Luiza PenquesNo ratings yet
- Magnetotellurics-Field Techniques - Week 7Document7 pagesMagnetotellurics-Field Techniques - Week 7shabila gadisNo ratings yet
- Electrom iTIG II Moottorimittauslaitteet - ENGDocument6 pagesElectrom iTIG II Moottorimittauslaitteet - ENGE BuNo ratings yet
- On Line Ups 6-10kva User ManualDocument32 pagesOn Line Ups 6-10kva User ManualADY Resources100% (1)
- Novatek NT96650 PDFDocument35 pagesNovatek NT96650 PDFRenatoNo ratings yet
- GT 1200 en DM Printc (1010.08)Document2 pagesGT 1200 en DM Printc (1010.08)monitex_twNo ratings yet
- Dasar Listrik Arus Bolak-BalikDocument35 pagesDasar Listrik Arus Bolak-BalikAri AsriyantoNo ratings yet