You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Economic Operation of Power SystemsDocument21 pagesEconomic Operation of Power Systemsvidya_sagar826No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Space Vector Pulse Width ModulationDocument25 pagesSpace Vector Pulse Width Modulationswathi_grenNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Module EncoderDocument3 pagesModule Encoderswathi_grenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- EMFT BookDocument294 pagesEMFT BookFaraz HumayunNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Power Systems Operation and Planning - EEE 577Document59 pagesPower Systems Operation and Planning - EEE 577saiphaneendra_mNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Digital Logic Circuit Model Exam QuestionsDocument6 pagesDigital Logic Circuit Model Exam Questionsswathi_grenNo ratings yet
- Economic Operation of Power SystemsDocument21 pagesEconomic Operation of Power Systemsvidya_sagar826No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Centers Use Supervisory Control and Data Acquisition' (SCADA), Where The Data IsDocument7 pagesCenters Use Supervisory Control and Data Acquisition' (SCADA), Where The Data Isswathi_grenNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- EE2354Document7 pagesEE2354swathi_grenNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Definition:: Software Program Linked Routines HardwareDocument1 pageDefinition:: Software Program Linked Routines Hardwareswathi_grenNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- DLCDocument2 pagesDLCswathi_grenNo ratings yet
- Digital Logic CircuitsDocument44 pagesDigital Logic Circuitsswathi_grenNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- CompiringDocument5 pagesCompiringswathi_grenNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- BLDC MotorDocument24 pagesBLDC Motorswathi_grenNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- A Dynamic Lithium-Ion Battery Model Considering The Effects of Temperature and Capacity FadingDocument4 pagesA Dynamic Lithium-Ion Battery Model Considering The Effects of Temperature and Capacity Fadingswathi_grenNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Protection and Switch gear functionsDocument1 pageProtection and Switch gear functionsswathi_grenNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- UntitledDocument1 pageUntitledswathi_grenNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- DianaDocument8 pagesDianaswathi_grenNo ratings yet
- Line Parameters ComputationDocument4 pagesLine Parameters Computationswathi_grenNo ratings yet
- Nominal T MethodDocument1 pageNominal T Methodswathi_grenNo ratings yet
- Nominal T MethodDocument1 pageNominal T Methodswathi_grenNo ratings yet
- PSXX OMR0002 PDFDocument64 pagesPSXX OMR0002 PDFLupeNo ratings yet
- Carta Psicrometrica PDFDocument1 pageCarta Psicrometrica PDFFederico Ferreira LopezNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- EMTOP Tools Guide: Affordable Power Tools & Hand ToolsDocument32 pagesEMTOP Tools Guide: Affordable Power Tools & Hand ToolsDIELECTRIC INSTALACIONES S.A.SNo ratings yet
- Wind Loading CalculationDocument2 pagesWind Loading CalculationMallesh NenkatNo ratings yet
- BURNDY GK6426 SpecsheetDocument2 pagesBURNDY GK6426 SpecsheetDavidNo ratings yet
- Unrestrained Beam With End MomentsDocument9 pagesUnrestrained Beam With End MomentsNikos StathoulopoulosNo ratings yet
- Service Manual: MU-A07YV - MU-A09YV - MU-A12YVDocument28 pagesService Manual: MU-A07YV - MU-A09YV - MU-A12YValessandroNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Fuel and EmissionsDocument221 pagesFuel and Emissionsthomas rulduNo ratings yet
- CCMC Canadian Code Compliance Evaluation - National Research Council CanadaDocument14 pagesCCMC Canadian Code Compliance Evaluation - National Research Council CanadaMark AdamsNo ratings yet
- Lab 2 Torsion Lab Instruction SpringDocument7 pagesLab 2 Torsion Lab Instruction SpringYong JinNo ratings yet
- Metsec Engineering Forms the FutureDocument24 pagesMetsec Engineering Forms the Futureshashank adigaNo ratings yet
- B-3801 IOM - Rev - 2011-09-02 (1) MidlandDocument23 pagesB-3801 IOM - Rev - 2011-09-02 (1) MidlandLucas MonteNo ratings yet
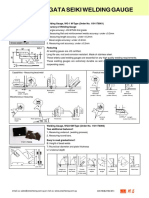
- Niigata Welding GaugeDocument2 pagesNiigata Welding GaugeFriady HalimNo ratings yet
- PEM Economy Gauge 1Document5 pagesPEM Economy Gauge 1kprasannanNo ratings yet
- Printable Fastener Tools PDFDocument28 pagesPrintable Fastener Tools PDFAgustin PeraltaNo ratings yet
- Hiab 320Document152 pagesHiab 320Jasbir Jammu Repairing & Maintence LLCNo ratings yet
- Characteristics of the Hydraulic Jump LabDocument10 pagesCharacteristics of the Hydraulic Jump LabnaeemNo ratings yet
- AP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98Document4 pagesAP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98LUKASNo ratings yet
- 06 Instructions Manual Hagglunds Eximtec - CEI CollahuasiDocument261 pages06 Instructions Manual Hagglunds Eximtec - CEI CollahuasiJorge RiveraNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Three-Dimensional Force Systems: Today's ObjectivesDocument17 pagesThree-Dimensional Force Systems: Today's ObjectivesAtef NazNo ratings yet
- DIY Balancing.: © Tony Foale 2008Document6 pagesDIY Balancing.: © Tony Foale 2008Factory PerformanceNo ratings yet
- Best Practice Manual-Fluid PipingDocument43 pagesBest Practice Manual-Fluid Pipingapi-3869476100% (1)
- Yawei Pressbrake ManualDocument54 pagesYawei Pressbrake ManualWayne Hoppe100% (1)
- Fluid Machinery Syllabus PDFDocument3 pagesFluid Machinery Syllabus PDFBajajNo ratings yet
- Goodyear Hydraulics Adapters Catalog PDFDocument165 pagesGoodyear Hydraulics Adapters Catalog PDFpsolutions.franciscoNo ratings yet
- G 1.1 Sohc-01Document1 pageG 1.1 Sohc-01Luis GarcíaNo ratings yet
- Kumera-848027c - Installation and Maintenance - en - 2015-08 PDFDocument40 pagesKumera-848027c - Installation and Maintenance - en - 2015-08 PDFgilbertogatoNo ratings yet
- Chief Engineer's Standing Instructions.Document3 pagesChief Engineer's Standing Instructions.prashant manhasNo ratings yet
- 4 UreviewDocument34 pages4 Ureviewumchemist2No ratings yet
- New ChangeDocument68 pagesNew ChangeAnoop Kamla PandeyNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)