You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Nisha JohneyDocument6 pagesNisha Johneypraveenpv7No ratings yet
- JijoDocument27 pagesJijopraveenpv7No ratings yet
- AiiroDocument19 pagesAiiropraveenpv7No ratings yet
- Tomy BikeDocument16 pagesTomy Bikepraveenpv7No ratings yet
- JoyalDocument1 pageJoyalpraveenpv7No ratings yet
- Smart Cities Is A Domain of Great Interest in The Modern SocietyDocument38 pagesSmart Cities Is A Domain of Great Interest in The Modern Societypraveenpv7No ratings yet
- ITS in India: Benefits and Applications of Intelligent Transportation SystemsDocument23 pagesITS in India: Benefits and Applications of Intelligent Transportation Systemspraveenpv70% (1)
- ITS in India: Benefits and Applications of Intelligent Transportation SystemsDocument23 pagesITS in India: Benefits and Applications of Intelligent Transportation Systemspraveenpv70% (1)
- Seismaic Behaviour of Isloated BridgesDocument41 pagesSeismaic Behaviour of Isloated Bridgespraveenpv7100% (1)
- SBSPDocument30 pagesSBSPpraveenpv7100% (1)
- Self Curing ConcreteDocument26 pagesSelf Curing Concretepraveenpv7No ratings yet
- 4G BroadbandDocument39 pages4G Broadbandpraveenpv7No ratings yet
- Seismaic Behaviour of Isloated BridgesDocument41 pagesSeismaic Behaviour of Isloated Bridgespraveenpv7100% (1)
- Curing Is The Maintenance of A Satisfactory Moisture ConDocument21 pagesCuring Is The Maintenance of A Satisfactory Moisture Conpraveenpv7No ratings yet
- Abin K Paul: ObjectiveDocument3 pagesAbin K Paul: Objectivepraveenpv7No ratings yet
- ACCOUNTANCY CLASS NOTESDocument8 pagesACCOUNTANCY CLASS NOTESpraveenpv7No ratings yet
- GurobusDocument24 pagesGurobuspraveenpv7No ratings yet
- Leaf SheetDocument11 pagesLeaf Sheetpraveenpv7No ratings yet
- PiezoelectricityDocument16 pagesPiezoelectricitypraveenpv7No ratings yet
- Piezoelectric It yDocument39 pagesPiezoelectric It ypraveenpv7No ratings yet
- AffidavitDocument2 pagesAffidavitpraveenpv7No ratings yet
- Piezoelectric It yDocument39 pagesPiezoelectric It ypraveenpv7No ratings yet
- Wireless Battery ChargerDocument21 pagesWireless Battery Chargerpraveenpv7No ratings yet
- A Study On Labour Welfare With Reference To Nagarjuna Herbal Concentrate LTDDocument2 pagesA Study On Labour Welfare With Reference To Nagarjuna Herbal Concentrate LTDpraveenpv7No ratings yet
- Recruitment ReportDocument62 pagesRecruitment Reportpraveenpv7No ratings yet
- Docof5penpctechnology 120302125342 Phpapp01Document39 pagesDocof5penpctechnology 120302125342 Phpapp01Shedrach_007No ratings yet
- Common Frend Page2Document7 pagesCommon Frend Page2praveenpv7No ratings yet
- SpectDocument31 pagesSpectapi-1993758480% (5)
- Recruitment ReportDocument62 pagesRecruitment Reportpraveenpv7No ratings yet
- AjeesaDocument31 pagesAjeesapraveenpv7No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- E4PA OmronDocument8 pagesE4PA OmronCong NguyenNo ratings yet
- Earth Planet - Google SearchDocument1 pageEarth Planet - Google SearchDaivik Lakkol Eswara PrasadNo ratings yet
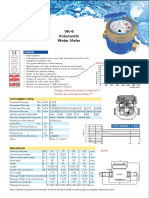
- Baylan: VK-6 Volumetric Water MeterDocument1 pageBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaNo ratings yet
- Merging - Scaled - 1D - & - Trying - Different - CLassification - ML - Models - .Ipynb - ColaboratoryDocument16 pagesMerging - Scaled - 1D - & - Trying - Different - CLassification - ML - Models - .Ipynb - Colaboratorygirishcherry12100% (1)
- MongoDB vs RDBMS - A ComparisonDocument20 pagesMongoDB vs RDBMS - A ComparisonShashank GuptaNo ratings yet
- Group 1 RRLDocument19 pagesGroup 1 RRLAngelo BolgarNo ratings yet
- Product Datasheet ASSA ABLOY DL6120T enDocument28 pagesProduct Datasheet ASSA ABLOY DL6120T enAbin RajuNo ratings yet
- Getting Started With DAX Formulas in Power BI, Power Pivot, and SSASDocument19 pagesGetting Started With DAX Formulas in Power BI, Power Pivot, and SSASJohn WickNo ratings yet
- M88A2 Recovery VehicleDocument2 pagesM88A2 Recovery VehicleJuan CNo ratings yet
- Ge Dir ReportsDocument1 pageGe Dir Reportsselvam chidambaramNo ratings yet
- (Unit) Title of The Chapter Name of FacilitatorDocument35 pages(Unit) Title of The Chapter Name of FacilitatorDipesh BasnetNo ratings yet
- QA InspectionDocument4 pagesQA Inspectionapi-77180770No ratings yet
- Dues+&+Bylaws+Committee+Packet ICPI John@bestadmix Com Tholyfield@Document52 pagesDues+&+Bylaws+Committee+Packet ICPI John@bestadmix Com Tholyfield@Greefield JasonNo ratings yet
- Rochester MN Unified Development Code (Draft)Document442 pagesRochester MN Unified Development Code (Draft)randyNo ratings yet
- LK BMHS 30 September 2021Document71 pagesLK BMHS 30 September 2021samudraNo ratings yet
- Converted File d7206cc0Document15 pagesConverted File d7206cc0warzarwNo ratings yet
- Outdoor Composting Guide 06339 FDocument9 pagesOutdoor Composting Guide 06339 FAdjgnf AANo ratings yet
- Adobe Photoshop 9 Cs2 Serial + Activation Number & Autorization Code ADocument1 pageAdobe Photoshop 9 Cs2 Serial + Activation Number & Autorization Code ARd Fgt36% (22)
- Soal Pat Inggris 11Document56 pagesSoal Pat Inggris 11dodol garutNo ratings yet
- Counsel For Plaintiff, Mark Shin: United States District Court Northern District of CaliforniaDocument21 pagesCounsel For Plaintiff, Mark Shin: United States District Court Northern District of CaliforniafleckaleckaNo ratings yet
- Cache Memory in Computer Architecture - Gate VidyalayDocument6 pagesCache Memory in Computer Architecture - Gate VidyalayPAINNo ratings yet
- $$TR Sas 114 AllDocument384 pages$$TR Sas 114 Allctudose4282No ratings yet
- Quiz - DBA and Tcont Bw-TypesDocument4 pagesQuiz - DBA and Tcont Bw-TypesSaifullah Malik100% (1)
- UE Capability Information (UL-DCCH) - Part2Document51 pagesUE Capability Information (UL-DCCH) - Part2AhmedNo ratings yet
- Caf 8 Aud Spring 2022Document3 pagesCaf 8 Aud Spring 2022Huma BashirNo ratings yet
- List of Registered Architects and Engineers As On 30-08-2010 PDFDocument10 pagesList of Registered Architects and Engineers As On 30-08-2010 PDFSaidhu MuhammedNo ratings yet
- CEMEX Global Strategy CaseDocument4 pagesCEMEX Global Strategy CaseSaif Ul Islam100% (1)
- Black Box Components and FunctionsDocument9 pagesBlack Box Components and FunctionsSaifNo ratings yet
- DX DiagDocument31 pagesDX DiagJose Trix CamposNo ratings yet
- Personal Selling ProcessDocument21 pagesPersonal Selling ProcessRuchika Singh MalyanNo ratings yet